Позиційна сервосистема
Номер патенту: 78637
Опубліковано: 10.04.2007
Автори: Чіпіжко Юрій Анатолійович, Богучарський В''ячеслав Вікторович, Євстаф''єв Євген Володимирович, Трач Віктор Іванович, Гамалій Наталія Вікторівна, Кучеров Дмитро Павлович
Формула / Реферат
Позиційна сервосистема, яка містить керуючу частину, що складається з формувача вектора стану, пристрою стикування з шиною локальної системи керування, обчислювача різниці, регулятора положення та суматора, виконавчу частину, що складається з підсилювача-комутатора, виконавчого двигуна, редуктора та об'єкта регулювання, канал вимірювання, що складається з датчиків швидкості та положення, при цьому вихід формувача вектора стану зв'язано з суматором послідовно через пристрій стикування з шиною локальної системи керування, обчислювач різниці та регулятор положення, вихід суматора зв'язано з об'єктом регулювання послідовно через підсилювач-комутатор, виконавчий двигун та редуктор, вихід редуктора з'єднано з об'єктом регулювання та з входом обчислювача різниці через датчик положення, а вихід виконавчого двигуна з'єднано з входом редуктора та входом суматора через датчик швидкості, яка відрізняється тим, що вона додатково містить функціональний перетворювач, вхід якого з'єднаний з виходом суматора, а вихід - зі входом підсилювача-комутатора.
Текст
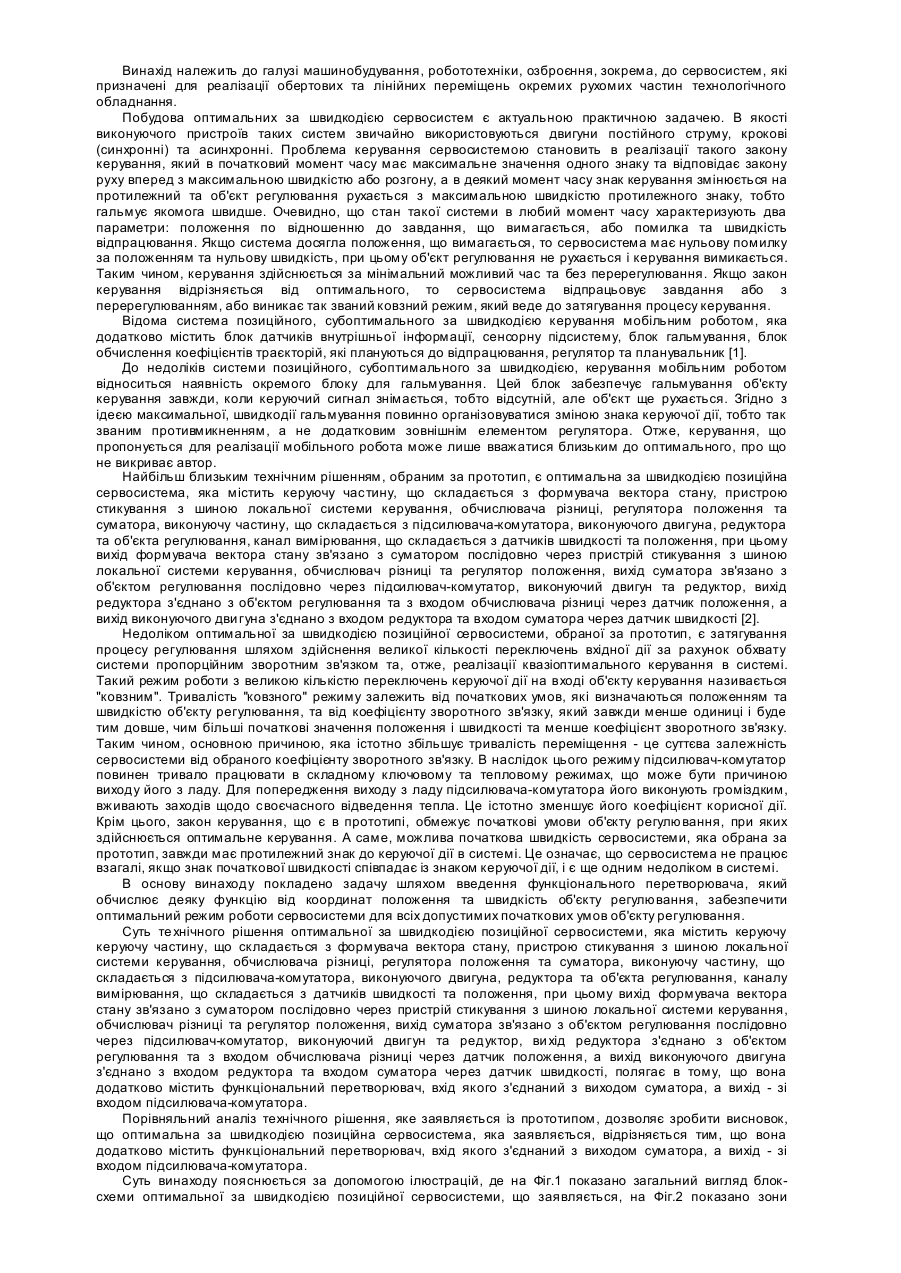
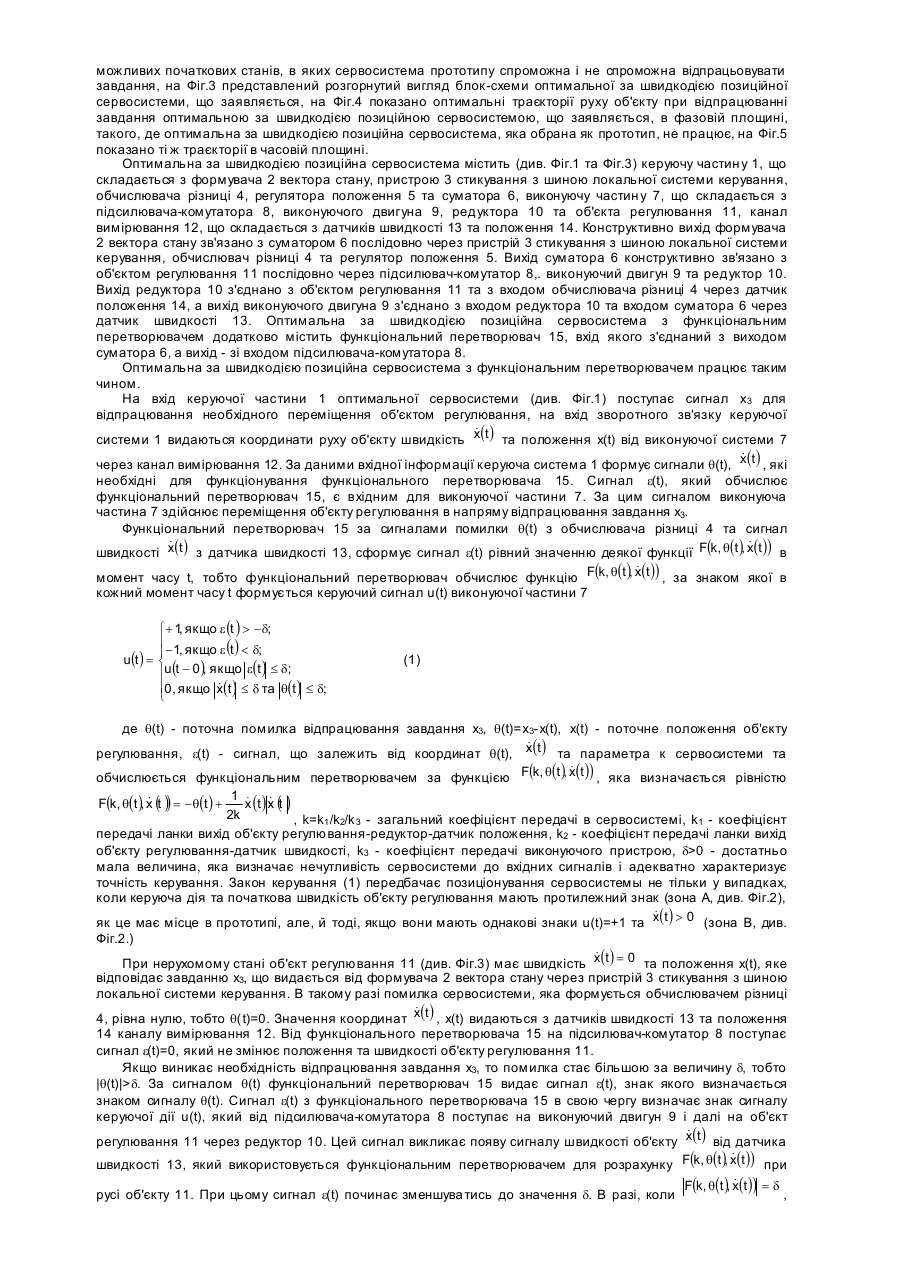
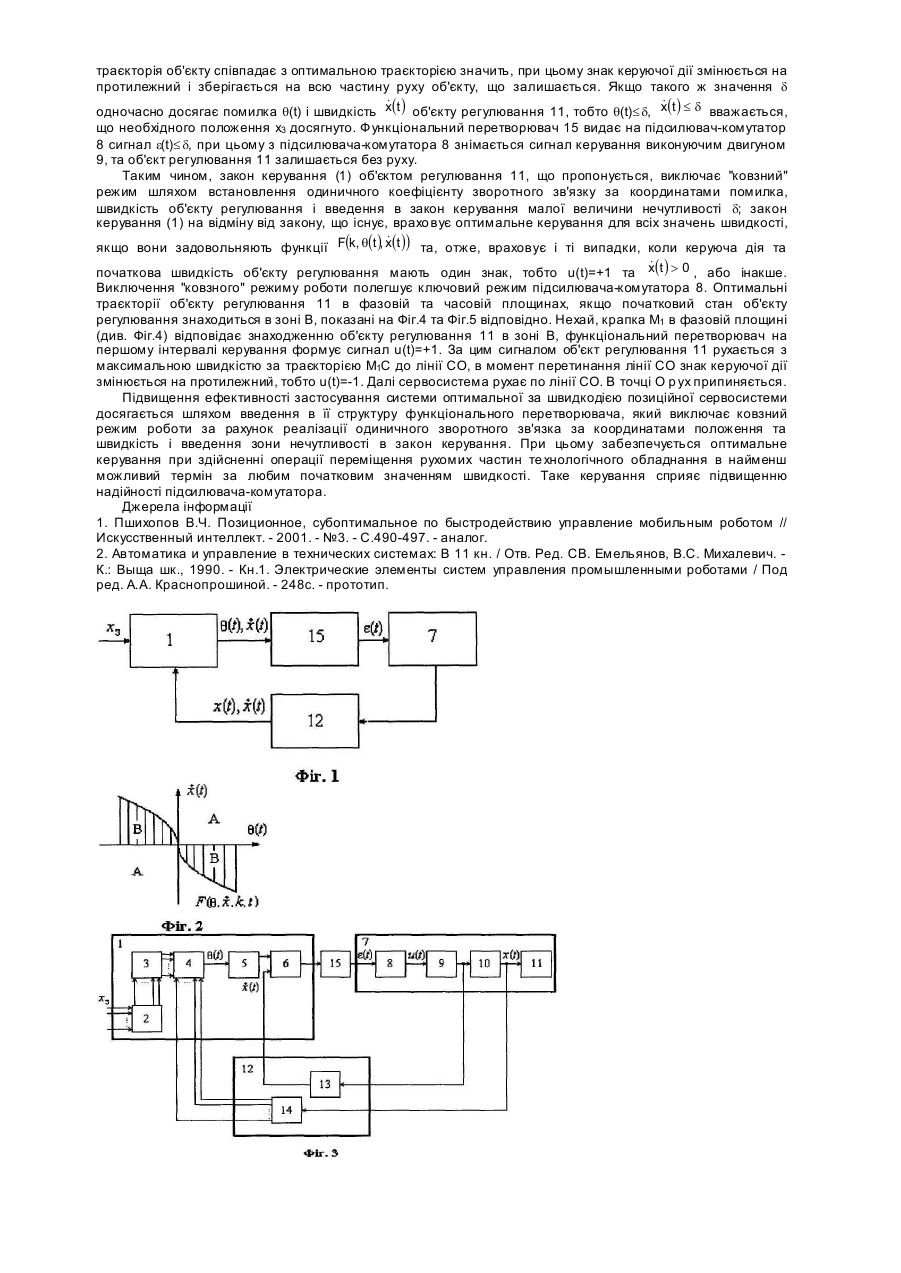
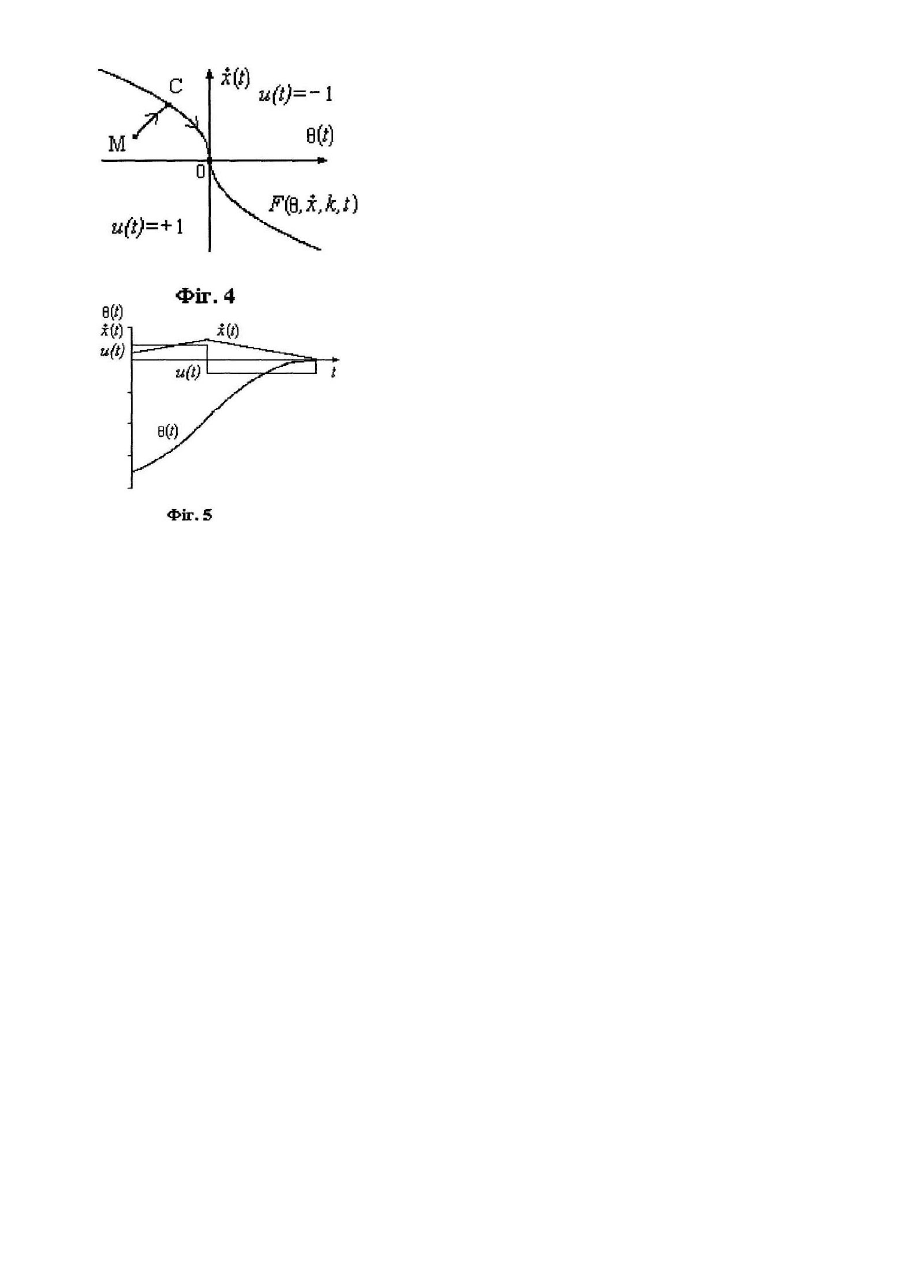
Винахід належить до галузі машинобудування, робототехніки, озброєння, зокрема, до сервосистем, які призначені для реалізації обертових та лінійних переміщень окремих рухомих частин технологічного обладнання. Побудова оптимальних за швидкодією сервосистем є актуальною практичною задачею. В якості виконуючого пристроїв таких систем звичайно використовуються двигуни постійного струму, крокові (синхронні) та асинхронні. Проблема керування сервосистемою становить в реалізації такого закону керування, який в початковий момент часу має максимальне значення одного знаку та відповідає закону руху вперед з максимальною швидкістю або розгону, а в деякий момент часу знак керування змінюється на протилежний та об'єкт регулювання рухається з максимальною швидкістю протилежного знаку, тобто гальмує якомога швидше. Очевидно, що стан такої системи в любий момент часу характеризують два параметри: положення по відношенню до завдання, що вимагається, або помилка та швидкість відпрацювання. Якщо система досягла положення, що вимагається, то сервосистема має нульову помилку за положенням та нульову швидкість, при цьому об'єкт регулювання не рухається і керування вимикається. Таким чином, керування здійснюється за мінімальний можливий час та без перерегулювання. Якщо закон керування відрізняється від оптимального, то сервосистема відпрацьовує завдання або з перерегулюванням, або виникає так званий ковзний режим, який веде до затягування процесу керування. Відома система позиційного, субоптимального за швидкодією керування мобільним роботом, яка додатково містить блок датчиків внутрішньої інформації, сенсорну підсистему, блок гальмування, блок обчислення коефіцієнтів траєкторій, які плануються до відпрацювання, регулятор та планувальник [1]. До недоліків системи позиційного, субоптимального за швидкодією, керування мобільним роботом відноситься наявність окремого блоку для гальмування. Цей блок забезпечує гальмування об'єкту керування завжди, коли керуючий сигнал знімається, тобто відсутній, але об'єкт ще рухається. Згідно з ідеєю максимальної, швидкодії гальмування повинно організовуватися зміною знака керуючої дії, тобто так званим противмикненням, а не додатковим зовнішнім елементом регулятора. Отже, керування, що пропонується для реалізації мобільного робота може лише вважатися близьким до оптимального, про що не викриває автор. Найбільш близьким технічним рішенням, обраним за прототип, є оптимальна за швидкодією позиційна сервосистема, яка містить керуючу частину, що складається з формувача вектора стану, пристрою стикування з шиною локальної системи керування, обчислювача різниці, регулятора положення та суматора, виконуючу частину, що складається з підсилювача-комутатора, виконуючого двигуна, редуктора та об'єкта регулювання, канал вимірювання, що складається з датчиків швидкості та положення, при цьому вихід формувача вектора стану зв'язано з суматором послідовно через пристрій стикування з шиною локальної системи керування, обчислювач різниці та регулятор положення, вихід суматора зв'язано з об'єктом регулювання послідовно через підсилювач-комутатор, виконуючий двигун та редуктор, вихід редуктора з'єднано з об'єктом регулювання та з входом обчислювача різниці через датчик положення, а вихід виконуючого дви гуна з'єднано з входом редуктора та входом суматора через датчик швидкості [2]. Недоліком оптимальної за швидкодією позиційної сервосистеми, обраної за прототип, є затягування процесу регулювання шляхом здійснення великої кількості переключень вхідної дії за рахунок обхвату системи пропорційним зворотним зв'язком та, отже, реалізації квазіоптимального керування в системі. Такий режим роботи з великою кількістю переключень керуючої дії на вході об'єкту керування називається "ковзним". Тривалість "ковзного" режиму залежить від початкових умов, які визначаються положенням та швидкістю об'єкту регулювання, та від коефіцієнту зворотного зв'язку, який завжди менше одиниці і буде тим довше, чим більші початкові значення положення і швидкості та менше коефіцієнт зворотного зв'язку. Таким чином, основною причиною, яка істотно збільшує тривалість переміщення - це суттєва залежність сервосистеми від обраного коефіцієнту зворотного зв'язку. В наслідок цього режиму підсилювач-комутатор повинен тривало працювати в складному ключовому та тепловому режимах, що може бути причиною виходу його з ладу. Для попередження виходу з ладу підсилювача-комутатора його виконують громіздким, вживають заходів щодо своєчасного відведення тепла. Це істотно зменшує його коефіцієнт корисної дії. Крім цього, закон керування, що є в прототипі, обмежує початкові умови об'єкту регулювання, при яких здійснюється оптимальне керування. А саме, можлива початкова швидкість сервосистеми, яка обрана за прототип, завжди має протилежний знак до керуючої дії в системі. Це означає, що сервосистема не працює взагалі, якщо знак початкової швидкості співпадає із знаком керуючої дії, і є ще одним недоліком в системі. В основу винаходу покладено задачу шляхом введення функціонального перетворювача, який обчислює деяку функцію від координат положення та швидкість об'єкту регулювання, забезпечити оптимальний режим роботи сервосистеми для всіх допустимих початкових умов об'єкту регулювання. Суть те хнічного рішення оптимальної за швидкодією позиційної сервосистеми, яка містить керуючу керуючу частину, що складається з формувача вектора стану, пристрою стикування з шиною локальної системи керування, обчислювача різниці, регулятора положення та суматора, виконуючу частину, що складається з підсилювача-комутатора, виконуючого двигуна, редуктора та об'єкта регулювання, каналу вимірювання, що складається з датчиків швидкості та положення, при цьому вихід формувача вектора стану зв'язано з суматором послідовно через пристрій стикування з шиною локальної системи керування, обчислювач різниці та регулятор положення, вихід суматора зв'язано з об'єктом регулювання послідовно через підсилювач-комутатор, виконуючий двигун та редуктор, ви хід редуктора з'єднано з об'єктом регулювання та з входом обчислювача різниці через датчик положення, а вихід виконуючого двигуна з'єднано з входом редуктора та входом суматора через датчик швидкості, полягає в тому, що вона додатково містить функціональний перетворювач, вхід якого з'єднаний з виходом суматора, а вихід - зі входом підсилювача-комутатора. Порівняльний аналіз технічного рішення, яке заявляється із прототипом, дозволяє зробити висновок, що оптимальна за швидкодією позиційна сервосистема, яка заявляється, відрізняється тим, що вона додатково містить функціональний перетворювач, вхід якого з'єднаний з виходом суматора, а вихід - зі входом підсилювача-комутатора. Суть винаходу пояснюється за допомогою ілюстрацій, де на Фіг.1 показано загальний вигляд блоксхеми оптимальної за швидкодією позиційної сервосистеми, що заявляється, на Фіг.2 показано зони можливих початкових станів, в яких сервосистема прототипу спроможна і не спроможна відпрацьовувати завдання, на Фіг.3 представлений розгорнутий вигляд блок-схеми оптимальної за швидкодією позиційної сервосистеми, що заявляється, на Фіг.4 показано оптимальні траєкторії руху об'єкту при відпрацюванні завдання оптимальною за швидкодією позиційною сервосистемою, що заявляється, в фазовій площині, такого, де оптимальна за швидкодією позиційна сервосистема, яка обрана як прототип, не працює, на Фіг.5 показано ті ж траєкторії в часовій площині. Оптимальна за швидкодією позиційна сервосистема містить (див. Фіг.1 та Фіг.3) керуючу частин у 1, що складається з формувача 2 вектора стану, пристрою 3 стикування з шиною локальної системи керування, обчислювача різниці 4, регулятора положення 5 та суматора 6, виконуючу частин у 7, що складається з підсилювача-комутатора 8, виконуючого двигуна 9, редуктора 10 та об'єкта регулювання 11, канал вимірювання 12, що складається з датчиків швидкості 13 та положення 14. Конструктивно вихід формувача 2 вектора стану зв'язано з суматором 6 послідовно через пристрій 3 стикування з шиною локальної системи керування, обчислювач різниці 4 та регулятор положення 5. Вихід суматора 6 конструктивно зв'язано з об'єктом регулювання 11 послідовно через підсилювач-комутатор 8,. виконуючий двигун 9 та редуктор 10. Вихід редуктора 10 з'єднано з об'єктом регулювання 11 та з входом обчислювача різниці 4 через датчик положення 14, а вихід виконуючого двигуна 9 з'єднано з входом редуктора 10 та входом суматора 6 через датчик швидкості 13. Оптимальна за швидкодією позиційна сервосистема з функціональним перетворювачем додатково містить функціональний перетворювач 15, вхід якого з'єднаний з виходом суматора 6, а вихід - зі входом підсилювача-комутатора 8. Оптимальна за швидкодією позиційна сервосистема з функціональним перетворювачем працює таким чином. На вхід керуючої частини 1 оптимальної сервосистеми (див. Фіг.1) поступає сигнал х3 для відпрацювання необхідного переміщення об'єктом регулювання, на вхід зворотного зв'язку керуючої & системи 1 видаються координати руху об'єкту швидкість x(t ) та положення x(t) від виконуючої системи 7 & через канал вимірювання 12. За даними вхідної інформації керуюча система 1 формує сигнали q(t), x(t ) , які необхідні для функціонування функціонального перетворювача 15. Сигнал e(t), який обчислює функціональний перетворювач 15, є вхідним для виконуючої частини 7. За цим сигналом виконуюча частина 7 здійснює переміщення об'єкту регулювання в напряму відпрацювання завдання х3. Функціональний перетворювач 15 за сигналами помилки q(t) з обчислювача різниці 4 та сигнал & & швидкості x(t ) з датчика швидкості 13, сформує сигнал e(t) рівний значенню деякої функції F(k, q(t ), x(t )) в & момент часу t, тобто функціональний перетворювач обчислює функцію F(k, q(t ), x(t )) , за знаком якої в кожний момент часу t формується керуючий сигнал u(t) виконуючої частини 7 ì+ 1 якщо e (t ) > - d; , ï ï- 1, якщо e (t ) 0 - достатньо мала величина, яка визначає нечутливість сервосистеми до вхідних сигналів і адекватно характеризує точність керування. Закон керування (1) передбачає позиціонування сервосистемы не тільки у випадках, коли керуюча дія та початкова швидкість об'єкту регулювання мають протилежний знак (зона А, див. Фіг.2), & як це має місце в прототипі, але, й тоді, якщо вони мають однакові знаки u(t)=+1 та x(t ) > 0 (зона В, див. & F(k, q(t ), x (t )) = -q(t ) + Фіг.2.) & При нерухомому стані об'єкт регулювання 11 (див. Фіг.3) має швидкість x(t ) = 0 та положення x(t), яке відповідає завданню х3, що видається від формувача 2 вектора стану через пристрій 3 стикування з шиною локальної системи керування. В такому разі помилка сервосистеми, яка формується обчислювачем різниці & 4, рівна нулю, тобто q(t)=0. Значення координат x(t ) , x(t) видаються з датчиків швидкості 13 та положення 14 каналу вимірювання 12. Від функціонального перетворювача 15 на підсилювач-комутатор 8 поступає сигнал e(t)=0, який не змінює положення та швидкості об'єкту регулювання 11. Якщо виникає необхідність відпрацювання завдання x3, то помилка стає більшою за величину d, тобто |q(t)|>d. За сигналом q(t) функціональний перетворювач 15 видає сигнал e(t), знак якого визначається знаком сигналу q(t). Сигнал e(t) з функціонального перетворювача 15 в свою чергу визначає знак сигналу керуючої дії u(t), який від підсилювача-комутатора 8 поступає на виконуючий двигун 9 і далі на об'єкт & регулювання 11 через редуктор 10. Цей сигнал викликає появу сигналу швидкості об'єкту x(t ) від датчика & швидкості 13, який використовується функціональним перетворювачем для розрахунку F(k, q(t ), x(t )) при & F(k, q(t ), x(t )) = d русі об'єкту 11. При цьому сигнал e(t) починає зменшува тись до значення d. В разі, коли , траєкторія об'єкту співпадає з оптимальною траєкторією значить, при цьому знак керуючої дії змінюється на протилежний і зберігається на всю частину руху об'єкту, що залишається. Якщо такого ж значення d & & одночасно досягає помилка q(t) і швидкість x(t ) об'єкту регулювання 11, тобто q(t)£ d, x(t ) £ d вважається, що необхідного положення х3 досягнуто. Функціональний перетворювач 15 видає на підсилювач-комутатор 8 сигнал e(t)£ d, при цьому з підсилювача-комутатора 8 знімається сигнал керування виконуючим двигуном 9, та об'єкт регулювання 11 залишається без руху. Таким чином, закон керування (1) об'єктом регулювання 11, що пропонується, виключає "ковзний" режим шляхом встановлення одиничного коефіцієнту зворотного зв'язку за координатами помилка, швидкість об'єкту регулювання і введення в закон керування малої величини нечутливості d; закон керування (1) на відміну від закону, що існує, врахо вує оптимальне керування для всіх значень швидкості, & якщо вони задовольняють функції F(k, q(t ), x(t )) та, отже, враховує і ті випадки, коли керуюча дія та & початкова швидкість об'єкту регулювання мають один знак, тобто u(t)=+1 та x(t ) > 0 , або інакше. Виключення "ковзного" режиму роботи полегшує ключовий режим підсилювача-комутатора 8. Оптимальні траєкторії об'єкту регулювання 11 в фазовій та часовій площинах, якщо початковий стан об'єкту регулювання знаходиться в зоні В, показані на Фіг.4 та Фіг.5 відповідно. Нехай, крапка М1 в фазовій площині (див. Фіг.4) відповідає знаходженню об'єкту регулювання 11 в зоні В, функціональний перетворювач на першому інтервалі керування формує сигнал u(t)=+1. За цим сигналом об'єкт регулювання 11 рухається з максимальною швидкістю за траєкторією M1C до лінії СО, в момент перетинання лінії СО знак керуючої дії змінюється на протилежний, тобто u(t)=-1. Далі сервосистема рухає по лінії CO. В точці О р ух припиняється. Підвищення ефективності застосування системи оптимальної за швидкодією позиційної сервосистеми досягається шляхом введення в її структуру функціонального перетворювача, який виключає ковзний режим роботи за рахунок реалізації одиничного зворотного зв'язка за координатами положення та швидкість і введення зони нечутливості в закон керування. При цьому забезпечується оптимальне керування при здійсненні операції переміщення рухомих частин те хнологічного обладнання в найменш можливий термін за любим початковим значенням швидкості. Таке керування сприяє підвищенню надійності підсилювача-комутатора. Джерела інформації 1. Пшихопов В.Ч. Позиционное, субоптимальное по быстродействию управление мобильным роботом // Искусственный интеллект. - 2001. - №3. - С.490-497. - аналог. 2. Автоматика и управление в технических системах: В 11 кн. / Отв. Ред. СВ. Емельянов, B.C. Михалевич. К.: Выща шк., 1990. - Кн.1. Электрические элементы систем управления промышленными роботами / Под ред. А.А. Краснопрошиной. - 248с. - прототип.
ДивитисяДодаткова інформація
Назва патенту англійськоюPosition servosystem
Автори англійськоюKucherov Dmytro Pavlovych, Hamalii Natalia Viktorivna, Chipizhko Yurii Anatoliiovych
Назва патенту російськоюСледящая система по положению
Автори російськоюКучеров Дмитрий Павлович, Гамалий Наталья Викторовна, Чипижко Юрий Анатольевич
МПК / Мітки
МПК: G05G 19/00, G05B 11/00, H02P 6/00
Мітки: сервосистема, позиційна
Код посилання
<a href="https://ua.patents.su/4-78637-pozicijjna-servosistema.html" target="_blank" rel="follow" title="База патентів України">Позиційна сервосистема</a>
Керований фазообертач
Номер патенту: 12457
Опубліковано: 15.02.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03H 11/02
Мітки: фазообертач, керований
Формула / Реферат:
Керований фазообертач, що містить суматори і блок пам'яті, який відрізняється тим, що на вхід суматора 1 поступає вхідний сигнал і інверсний вихідний сигнал блока пам'яті 5, вихід суматора 1 з'єднаний з входом підсилювача 4 з коефіцієнтом посилення h/T, де h - крок дискретизації, вихід підсилювача 4 з'єднаний з входом суматора 2, другий вхід якого з'єднаний з виходом блока пам'яті 5, вихід суматора 2 з'єднаний з двома входами суматора 3 і...
Цифро-аналоговий фазообертач
Номер патенту: 16431
Опубліковано: 15.08.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: фазообертач, цифро-аналоговий
Формула / Реферат:
Цифроаналоговий фазообертач, що містить суматори, підсилювачі і елемент затримки, який відрізняється тим, що вхідний сигнал x поступає на вхід вхідного диференціального підсилювача 1, вихід якого пов'язаний з входом операційного підсилювача 2 і інверсним входом вихідного диференціального підсилювача 5, вихід операційного підсилювача 2 сполучений з входом суматора 3, вихід суматора 3 пов'язаний з входом вихідного диференціального підсилювача 5...
Фазообертач

Номер патенту: 16432
Опубліковано: 15.08.2006
Автори: Долгін Володимир Прохорович, Долгін Ігор Володимирович
МПК: H03H 11/02
Мітки: фазообертач
Формула / Реферат:
Фазообертач, що містить суматор, помножувач і підсилювачі, який відрізняється тим, що вхідний сигнал х надходить на вхід вхідного диференціального підсилювача 1, вихід якого пов'язаний з входом помножувача 2 і інверсним входом вихідного диференціального підсилювача 5, на другий вхід помножувача 2 поданий сигнал корекції q, вихід якого сполучений з входом суматора 3, вихід суматора 3 пов'язаний з входом вихідного диференціального підсилювача 5...
Коректор

Номер патенту: 12454
Опубліковано: 15.02.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: коректор
Формула / Реферат:
Коректор, що містить суматори і блок затримки, який відрізняється тим, що введений диференціальний підсилювач 1, на який надходить вхідний сигнал, а на його інверсний вхід - сигнал блока затримки 4, вихід диференціального підсилювача 1 сполучений з входом суматора 2, другий вхід якого сполучений з виходом блока затримки 4, вихід суматора 2 сполучений з двома входами суматора 3 і входом блока затримки 4, на інверсний вхід суматора 3 поданий...
Борона гнучка просапна позиційна м.і.бездольного
Номер патенту: 72473
Опубліковано: 15.03.2005
Автор: Бездольний Микола Іванович
МПК: A01B 19/00
Мітки: просапна, борона, позиційна, гнучка, м.і.бездольного
Формула / Реферат:
Борона гнучка просапна позиційна, що має раму, виконану у вигляді вертикального бруса для кріплення у штатному гнізді просапного культиватора і прикріплених до нього гряділів, до кінців яких приєднаний з можливістю обертання навколо поздовжньої осі ланцюговий зубовий модуль, а в середній частині гряділів установлена розпірна штанга для зміни відстані між їх кінцями, яка відрізняється тим, що гряділі виконані у вигляді П-подібної рамки, яка...
Попередній патент: Магнітний сепаратор
Наступний патент: Вогнетривка набивна маса
Випадковий патент: Спосіб діагностики розвитку атеросклерозу