Система керування вогнем
Номер патенту: 48905
Опубліковано: 16.05.2005
Автори: Гузь Володимир Іванович, Протасов Володимир Георгійович, Богомол Володимир Іванович, Яновський Юрій Васильович, Піронер Ян Михайлович, Медвідь Володимир Станіславович

Формула / Реферат
Імпульсне джерело електричної енергії містить порожній металевий циліндр, вибухову речовину, первинне джерело електричної енергії, комутуючий елемент, навантаження, суцільний металевий циліндр, струмопровід, комутуючий елемент.
Текст
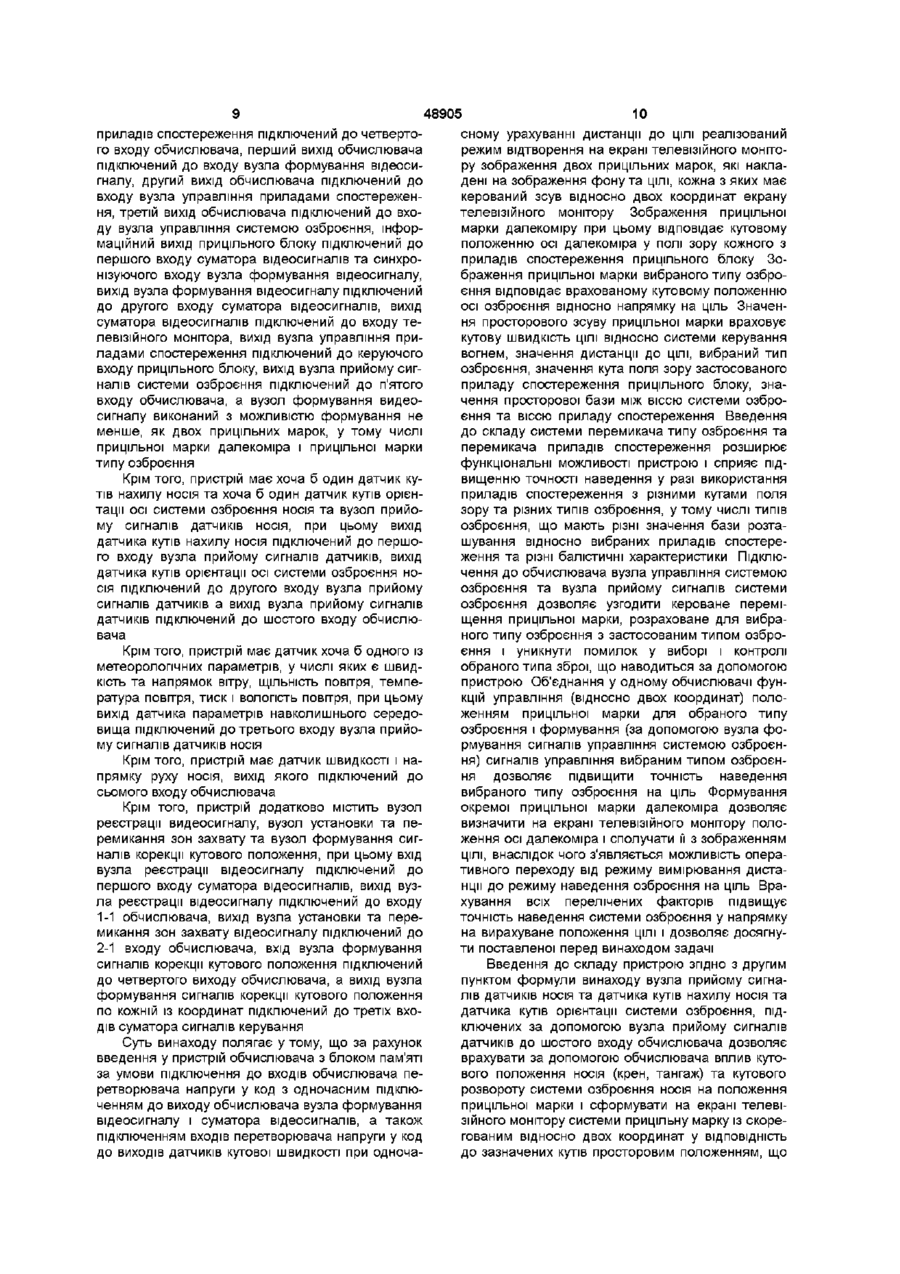
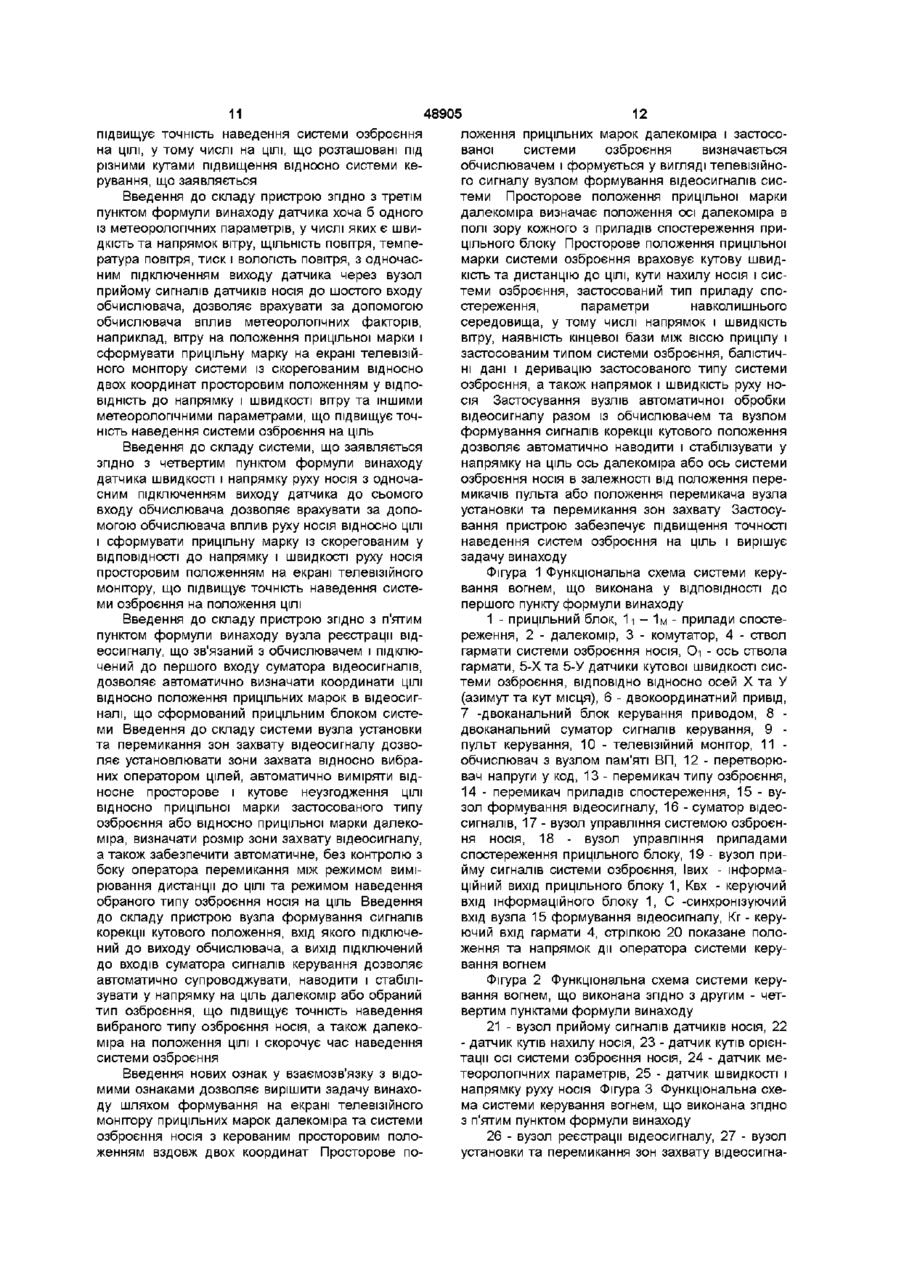
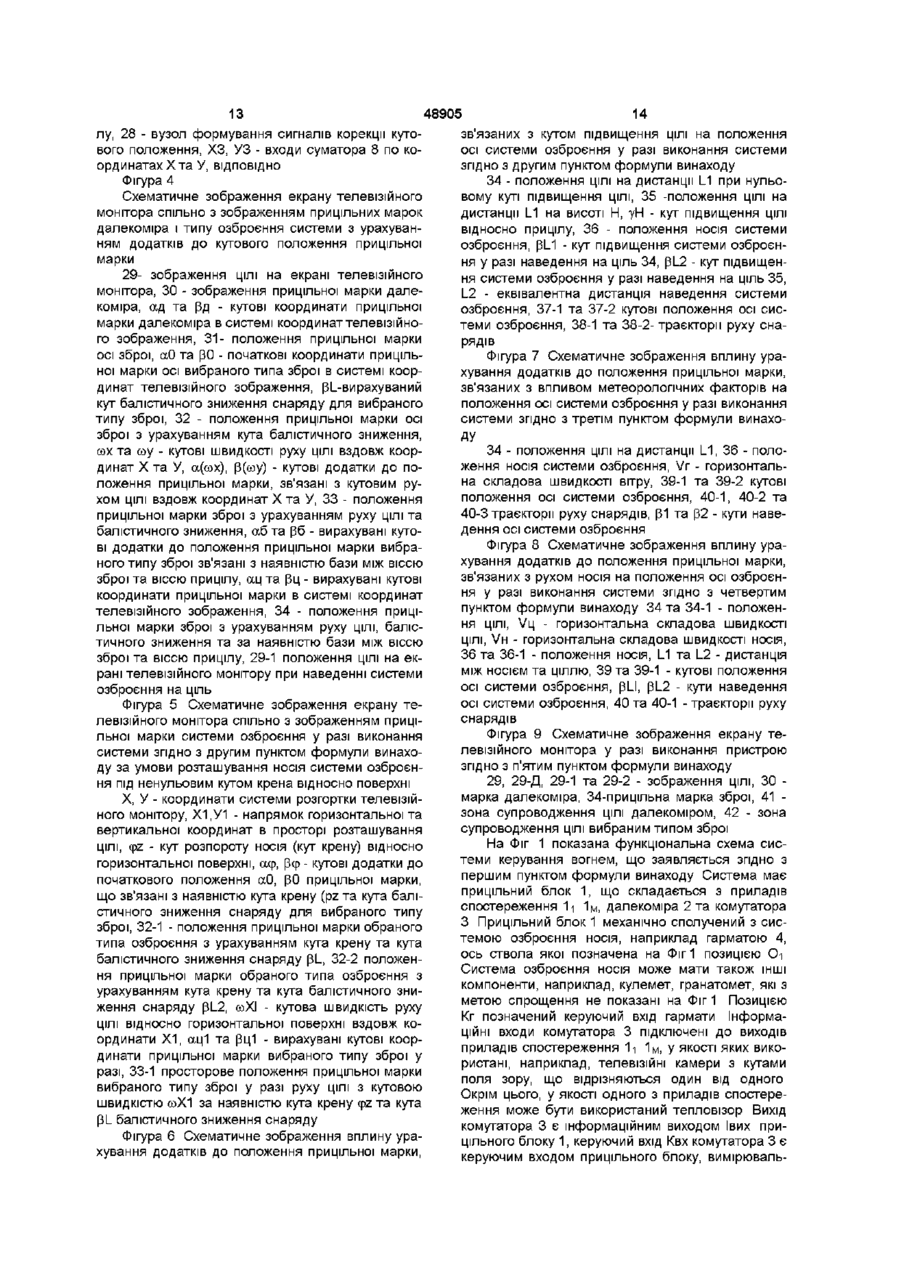
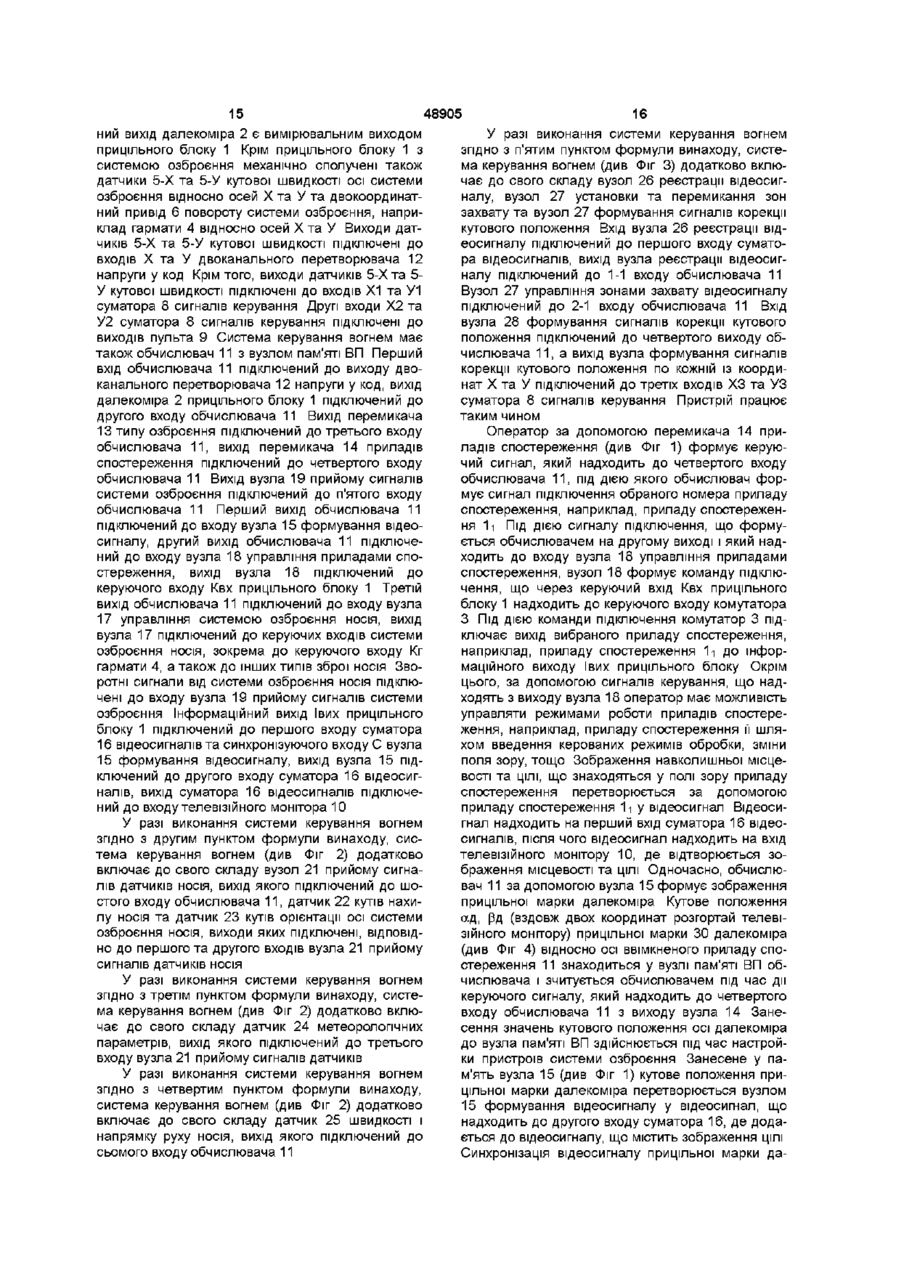
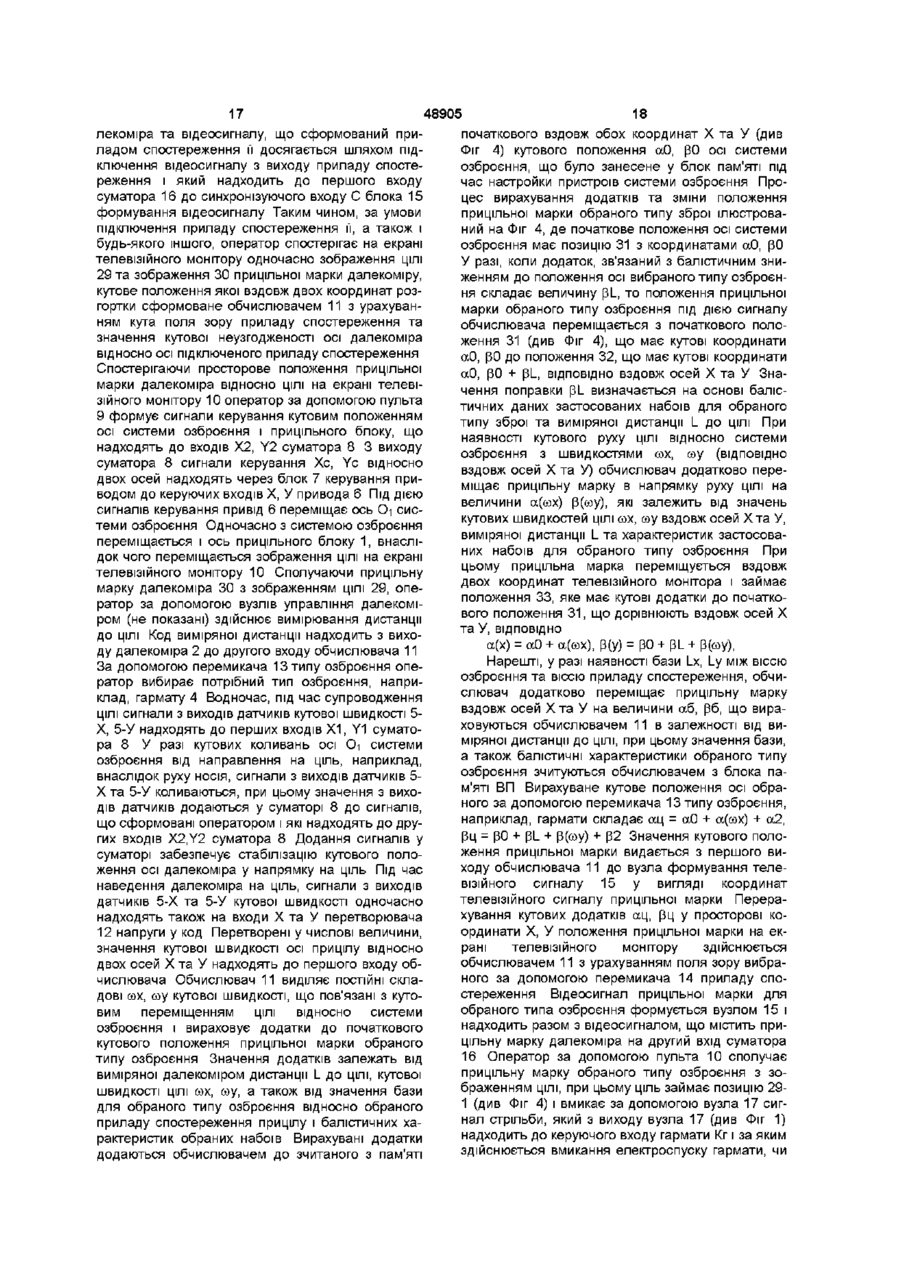
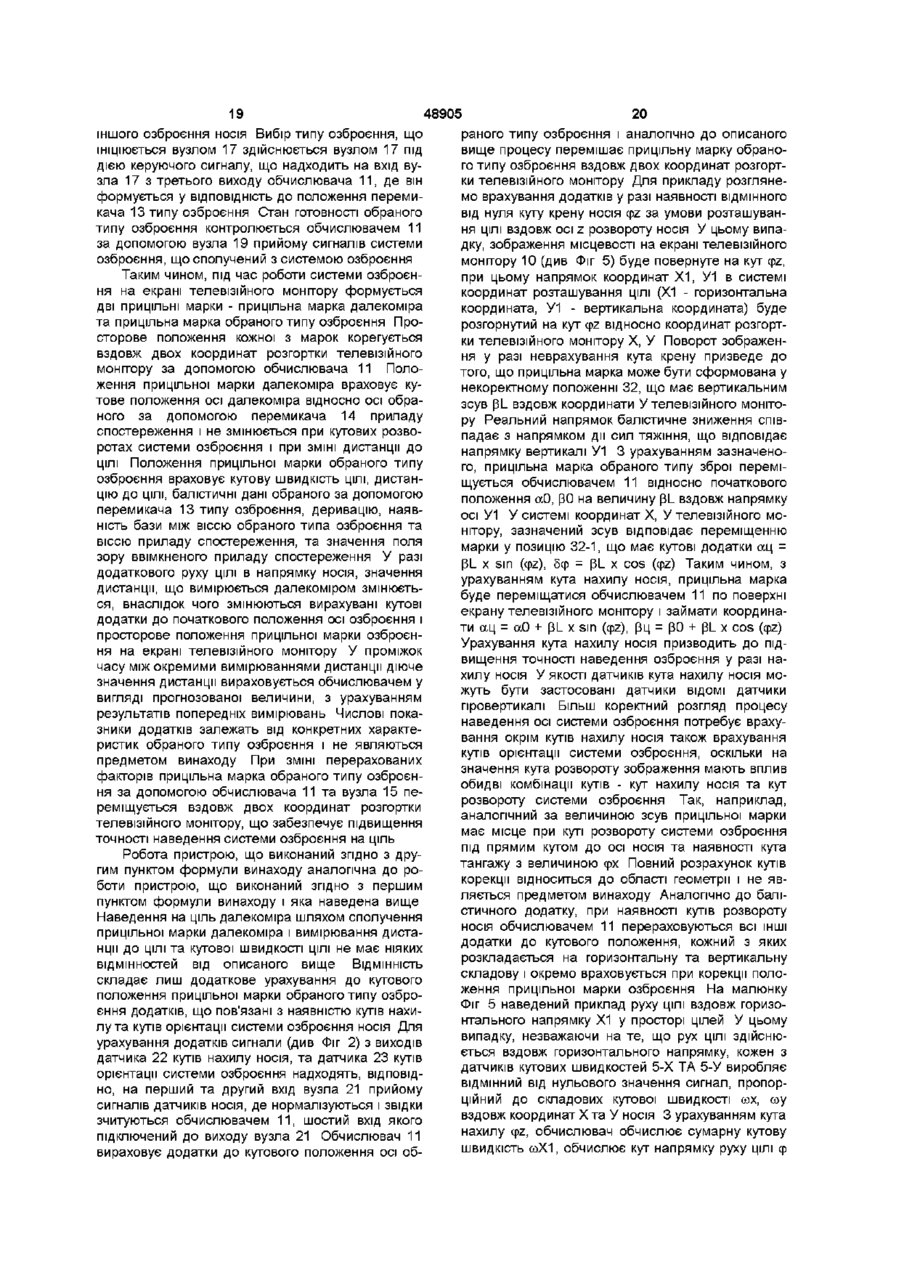
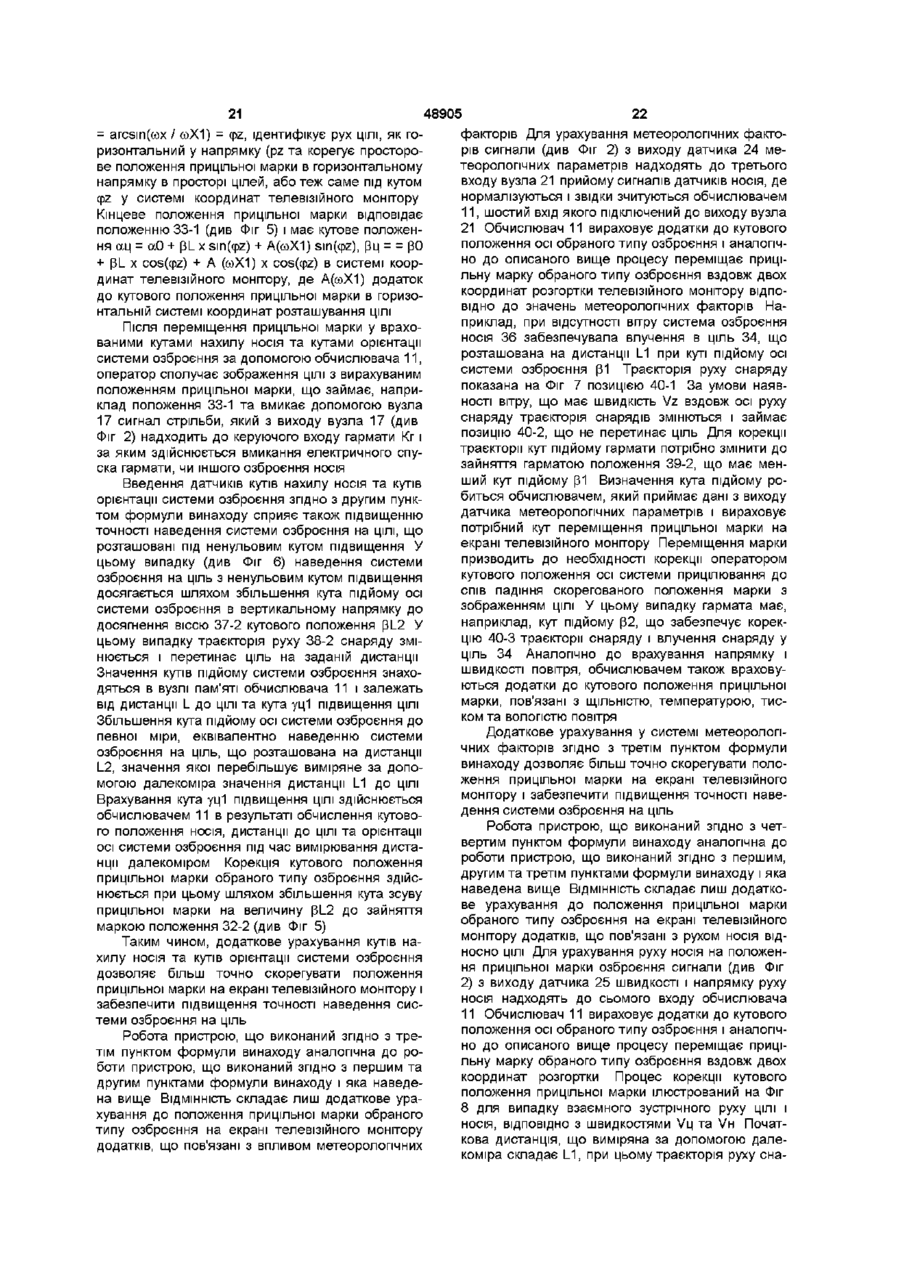
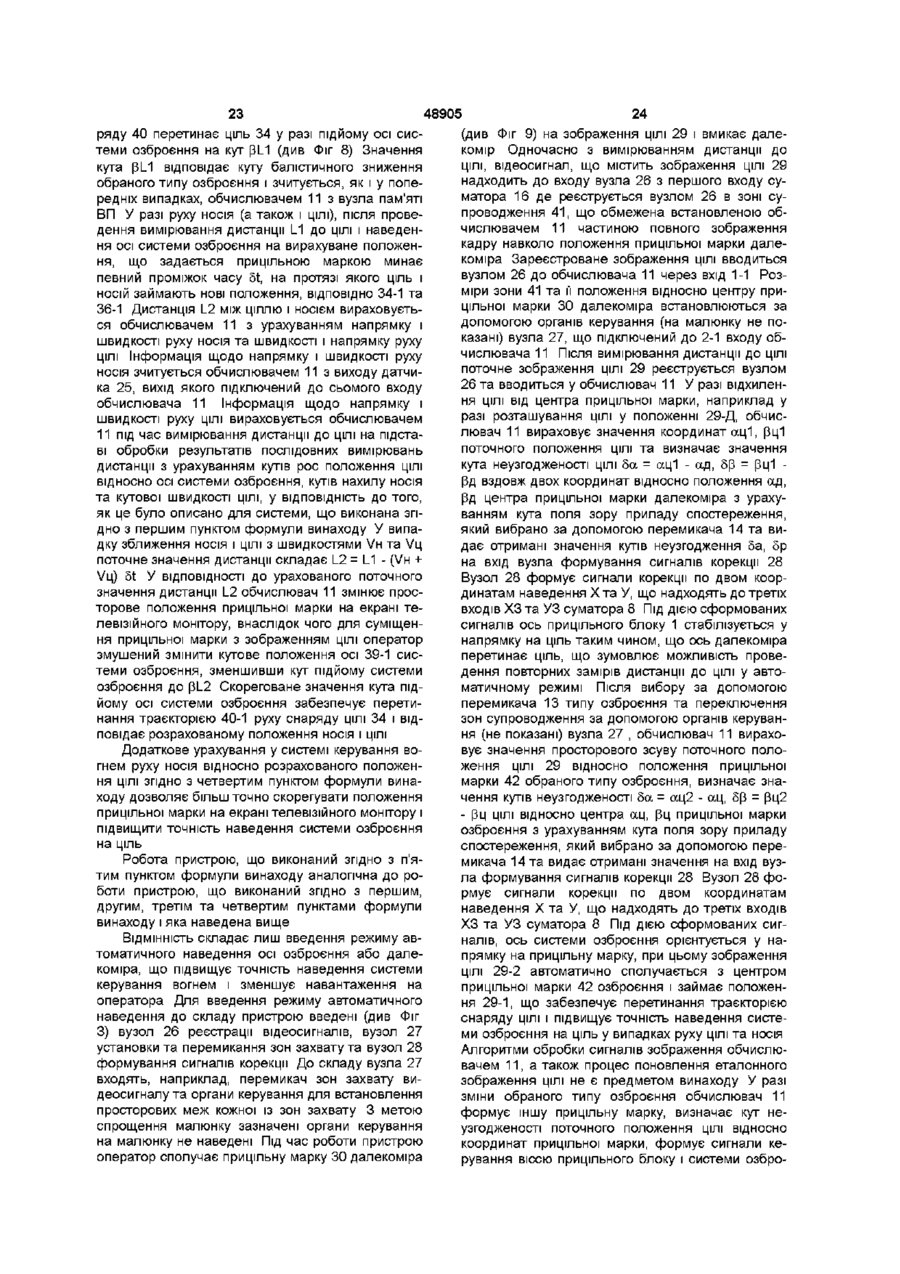
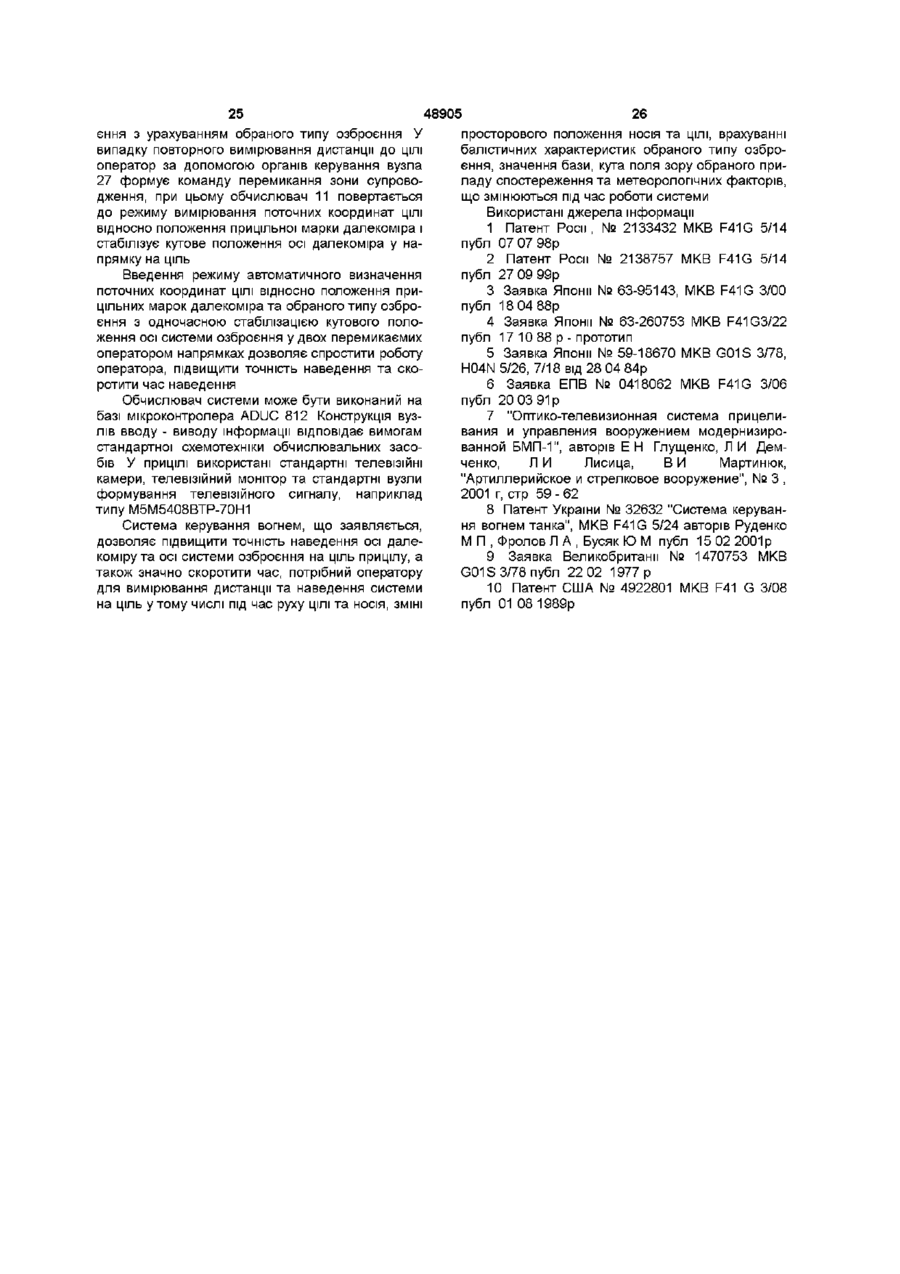
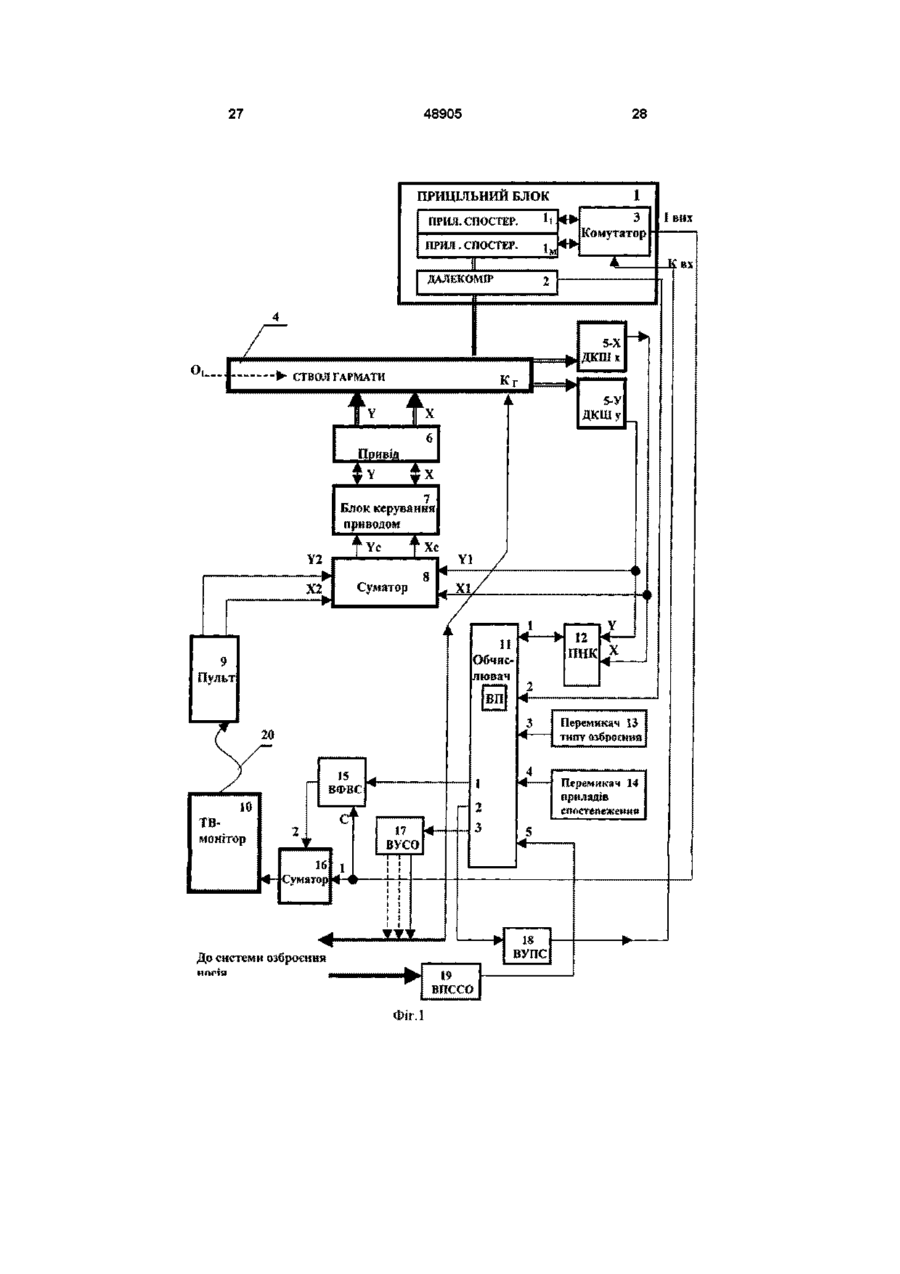
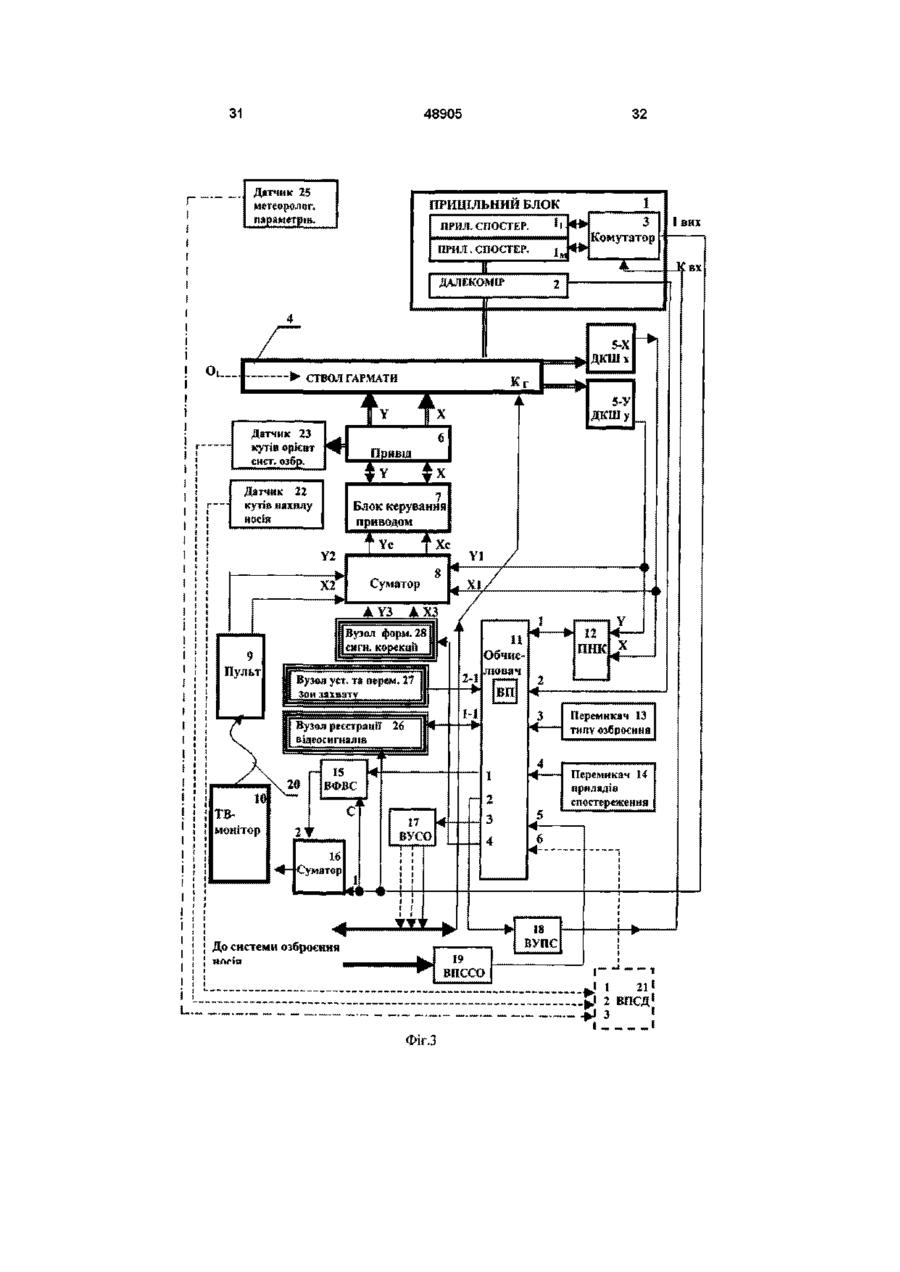
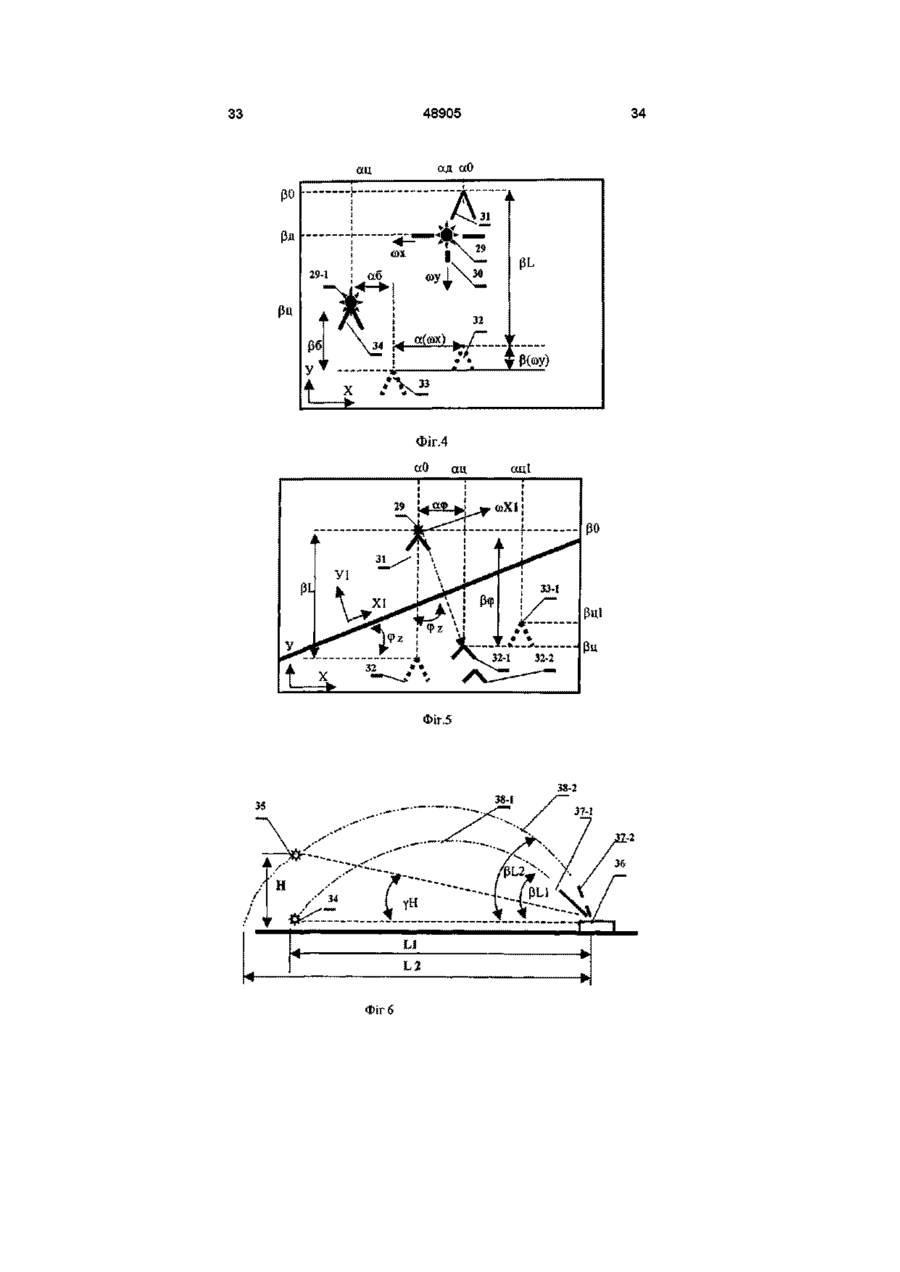
1 Система керування вогнем, що містить механічно сполучені з системою озброєння носія двокоординатний привід, датчики кутової швидкості системи озброєння відносно двох осей X та У та прицільний блок, до складу якого входить принаймні один прилад спостереження та далекомір, підключені до системи озброєння носія вузол управління системою озброєння носія та вузол прийому сигналів системи озброєння а також телевізійний монітор, пульт керування, двоканальний блок керування приводом та двоканальний суматор сигналів керування, перші входи якого по кожній координаті підключені до виходів датчиків кутової швидкості, другі входи суматора сигналів керування підключені по кожній із координат до виходів пульта керування, виходи суматорів сигналів керування по кожній із координат підключені до керуючих входів блока керування приводами, виходи якого у кожній координаті підключені до керуючих входів приводу, яка відрізняється тим, що до неї додатково введені обчислювач з вузлом пам'яті, двоканальний перетворювач напруги у код, вузол формування відеосигналу, суматор відеосигналів, вузол управління приладами спостереження прицільного блока, перемикач приладів спостереження, перемикач типу озброєння, при цьому виходи датчиків кутової швидкості по кожній із координат підключені до входів каналів перетворювача напруги у код, вихід перетворювача напруги у код підключений до першого входу обчислювача, вимірювальний вихід далекоміра прицільного блока підключений до другого входу обчислювача, вихід перемикача типу озброєння підключений до третього входу обчислювача, вихід перемикача приладів спостереження підключений до четвертого входу обчислювача, перший вихід обчислювача підключений до входу вузла формування відеосигналу, другий вихід об числювача підключений до входу вузла управління приладами спостереження, третій вихід обчислювача підключений до входу вузла управління системою озброєння, інформаційний вихід прицільного блока підключений до першого входу суматора відеосигналів та синхронізуючого входу вузла формування відеосигналу, вихід вузла формування відеосигналу підключений до другого входу суматора відеосигналів, вихід суматора відеосигналів підключений до входу телевізійного монітора, вихід вузла управління приладами спостереження підключений до керуючого входу прицільного блока, вихід вузла прийому сигналів системи озброєння підключений до п'ятого входу обчислювача, а вузол формування відеосигналу виконаний з можливістю формування не менше, як двох прицільних марок, у тому числі прицільної марки далекоміра і прицільної марки типу озброєння 2 Система керування вогнем за п 1, яка відрізняється тим, що має хоча б один датчик кутів нахилу носія та хоча б один датчик кутів орієнтації осі системи озброєння носія, та вузол прийому сигналів датчиків носія, при цьому вихід датчика кутів нахилу носія підключений до першого входу вузла прийому сигналів датчиків, вихід датчика кутів орієнтації осі системи озброєння носія підключений до другого входу вузла прийому сигналів датчиків, а вихід вузла прийому сигналів датчиків підключений до шостого входу обчислювача 3 Система керування вогнем за п 1 або п 2, яка відрізняється тим, що має датчик хоча б одного із метеорологічних параметрів, у числі яких є швидкість та напрямок вітру, ЩІЛЬНІСТЬ повітря, температура повітря, тиск і вологість повітря, при цьому вихід датчика параметрів навколишнього середовища підключений до третього входу вузла прийому сигналів датчиків носія 4 Система керування вогнем за пп 1,2 або п З, яка відрізняється тим, що має датчик швидкості і напрямку руху носія, вихід якого підключений до сьомого входу обчислювача 5 Система керування вогнем за пп 1, 2, 3 або п 4, яка відрізняється тим, що має вузол реєстрації відеосигналу, вузол установки та перемикання зон захоплення та вузол формування сигналів корекції кутового положення, при цьому вхід вузла реєстрації відеосигналу підключений до першого входу ю о 00 48905 суматора відеосигналів, вихід вузла реєстрації відеосигналу підключений до входу 1 - 1 обчислювача, вихід вузла установки та перемикання зон захоплення відеосигналу підключений до 2 - 1 входу обчислювача, вхід вузла формування сиг налів корекції кутового положення підключений до четвертого виходу обчислювача, а вихід вузла формування сигналів корекції кутового положення по кожній із координат підключений до третіх входів суматора сигналів керування Винахід відноситься до галузі систем прицілювання та наведення, що використовують телевізійні, тепловізійні та далекомірні прилади та системи керування, які входять, наприклад, до складу бойової машини піхоти БМП Винахід може бути застосований для підвищення точності наведення систем озброєння БМП ВІДОМІ пристрої для прицілювання та наведення системи озброєння бойової машини за допомогою системи стабілізації озброєння, що включає до свого складу прицільний блок, що містить прилади спостереження і далекомір, пристрої для навігації, обчислювальний пристрій, що містить у тому числі блоки вирахування кутів корекції осі системи озброєння вздовж двох осей наведення, датчики кутів нахилу носія та стабілізатор систем озброєння, який механічно сполучений з системою озброєння носія, наприклад бойової машини піхоти БМП-3 ВІДОМІ пристрої описані, наприклад у патентах Роси № 2138757 МКВ F41G 5/14 публ 27 09 99р. № 2133432 МКВ F41G5/14 публ 07 07 98р та технічних рішень щодо знаходження потрібного кута прицілювання з урахуванням кутів розташування носія та ЦІЛІ, швидкості вітру, напрямку та швидкості руху ЦІЛІ, тощо Водночас, зазначене спрощення алгоритмів та технічних рішень супроводжується зниженням точності наведення як прицілу, так і всієї системи озброєння носія у напрямку на ціль Так, наприклад, у прицілі, який описаний у статті "Оптико-телевизионная система прицеливания и управления вооружением модернизированной БМП-1", авторів Е Н Глущенко, Л И Демченко, Л И Лисица, В И Марцинюк, "Артиллерийское и стрелковое вооружение", № 3 , 2001 р , стор 59 62 врахування балістичної поправки або кута зниження здійснюється шляхом електронного зсуву прицільної марки в вертикальному вздовж телевізійного екрану напрямку Водночас, відомий пристрій не має засобів для врахування кутів випередження для цілей, що рухаються, засобів для врахування паралаксу між віссю гармати чи іншого озброєння та віссю прицілу, засобів для врахування поправок, пов'язаних з нахилом носія, поправок, пов'язаних з кутовим положенням ЦІЛІ відносно носія, швидкістю вітру та швидкістю руху носія Кожна із перерахованих поправок має критичне значення для забезпечення точності наведення Так, наприклад, балістична поправка, яка була зроблена в вертикальному напрямку вздовж екрана телевізійного монітору при наявності поперечних нахилів носія (крен, тангаж) буде мати в земній системі координат не тільки вертикальну, але і горизонтальну складову, дія якої буде приводити до зростання промаху відомої системи відносно ЦІЛІ Таким чином, відомий приціл може використовуватись тільки при фіксованій орієнтації системи озброєння носія і ЦІЛІ, наприклад, при розташуванні ЦІЛІ на земній поверхні і при горизонтальному положенні носія озброєння, а також у разі прицілювання відносно нерухомої ЦІЛІ При роботі з рухомими цілями, при наявності кінцевої відстані - бази між віссю гармати та віссю прицілу, при нахилі носія чи при наведенні прицілу на ЦІЛІ, що розташовані на різній висоті з носієм виникає похибка наведення систем озброєння носія, що є недоліком відомого прицілу У відомому пристрої згідно з заявкою ЕПВ № 0418062 "Приціл, що використовує додаток на вирахуване випередження" МКВ F41G 3/06 публ 20 03 91р. враховуються додатки до положення прицільної марки, які залежать від кутової швидкості осі прицілу вздовж двох координат і частково від дистанції, яка введена заздалегідь, або значення якої передбачається Зсув прицільної марки відбувається як по горизонталі, так і по вертикалі за допомогою схем формування електронного перехрестя на ВІДОМІ пристрої дозволяють управляти кутом наведення системи озброєння, у тому числі на ЦІЛІ, що рухаються з урахуванням додатків до кутового положення осі системи озброєння, які враховують кути розташування ЦІЛІ та носія озброєння, швидкість та напрям вітру, швидкість руху носія та ЦІЛІ, наявність паралаксу між віссю прицілу і віссю системи озброєння, тощо Недоліком відомих пристроїв є необхідність використання двох незалежних керованих приводів для прицілу та гармати, що ускладнює систему ВІДОМІ також пристрої, що містять приціли, які механічно сполучені з приводом наведення системи озброєння носія ВІДОМІ пристрої використовують спільний привід для наведення прицілу і системи озброєння у напрямку на ціль ВІДОМІ пристрої описані, наприклад, у заявці ЕПВ № 0418062 МКВ F41G 3/06 публ 20 03 91 р , заявці Японії № 59-18670 МКВ G01S 3/78, H04N 5/26, 7/18 від 28 04 84 р , заявці Японії № 63-95143 МКВ F41G 3/00 від 18 04 88 р, заявці Японії № 63260753 МКВ F41G 3/22 від 17 10 88 р , пат США № 4922801 МКВ F41G 3/08, НКВ 89 / 41 05 від 01 081989р, а також у статті "Оптикотелевизионная система прицеливания и управления вооружением модернизированной БМП-1", авторів Е Н Глущенко, Л И Демченко, Л И Лисица, В И Марцинюк, "Артиллерийское и стрелковое вооружение", № 3 , 2001 г, стр 59 - 62 ВІДОМІ при строї більш прості за рахунок виключення із складу системи керування незалежного приводу прицілу і використання спільного приводу для наведення гармати і прицілу на ціль Простота відомих пристроїв обумовлена також спрощенням алгоритмів 48905 екрані телевізійного монітору Відомий приціл дозволяє частково компенсувати похибки при наведенні на ЦІЛІ, що рухаються Водночас, у відомому пристрої не враховуються перераховані вище додатки до положення прицільної марки, пов'язані з кутовою та просторовою орієнтацією носія прицілу, наявності бази між віссю прицілу та віссю озброєння, поправки на різницю у висоті розташування носія прицілу та ЦІЛІ, а також поправки на швидкість та напрямок вітру Неврахування перерахованих факторів призводить до збільшення похибки наведення прицілу як на ЦІЛІ, ЩО рухаються, так і на стаціонарно розташовані ЦІЛІ Таким чином, головним фактором, що призводить до погіршення точності наведення систем озброєння з спільним приводом є неврахування додатків до положення прицільної марки, відсутність відображення вирахуваних додатків на екрані телевізійного монітору у вигляді врахованих зсувів прицільної марки та, ВІДПОВІДНО, відсутність забезпечення стабілізації і наведення осі систем озброєння у враховану точку наведення Найбільш близьким за технічною суттю до пристрою, що заявляється, є пристрій, описаний у заявці Японії "Пристрій для автоматичного наведення гармати бойової машини за допомогою телекамери" № 63-260753 МКВ F41G 3/22 від 17 10 88р , який обрано у якості прототипу Відомий пристрій - прототип містить прицільний блок, який механічно зв'язаний з системою озброєння (гарматою, гранатометом, кулеметом) бойової машини, наприклад, БМП До складу прицільного блоку входить, наприклад, телевізійна камера Відомим технічним рішенням є включення до складу прицільного блоку далекоміра (див, наприклад, пристрій згідно з патентом України № 32632 "Система керування вогнем танка", МКВ F41G 5/24 авторів Руденко М П , Фролов Л А , Бусяк Ю М публ 15 02 2001 р), тепловізора, або декількох телевізійних камер, внаслідок чого, зазначені признаки введені до складу обмежувальної частини формули винаходу З системою озброєння пристрою - прототипу механічно зв'язані датчики кутової швидкості та привід системи стабілізації озброєння Датчики кутової швидкості реагують на значення кутової швидкості, наприклад, відносно двох осей - азимута та кута місця Привід системи стабілізації виконує переміщення і стабілізацію кутового положення системи озброєння носія відносно двох зазначених осей Інформаційний вихід прицільного блоку, тобто вихід телевізійної камери чи камер підключений до входу блока стеження, вихід якого підключений до входу блока множення та першого входу суматора сигналів стеження По кожній з координат вихід ВІДПОВІДНОГО датчика кутової швидкості з'єднаний з першим входом суматора сигналів керування та входом інтегратора Вихід інтегратора підключений до другого входу суматора сигналів стеження Вихід суматора сигналів стеження через блок, що диференціює, підключений до другого входу суматора сигналів керування Окрім цього, вихід блока стеження через блок множення підключений до третього входу суматора сигналів керування Вихід суматора сигналів керування підключений до входів блоку керування привода системи стабілізації, вихід блоків керування приводу підключений до керуючих входів привода системи стабілізації Робота відомого пристрою - прототипу базується на формуванні сигналів керування, які залежать від кутової швидкості та положення ЦІЛІ в полі зору телевізійної камери Сигнали керування з виходів блоку множення та блоку, що диференціює, надходять до входів суматора, де додаються до сигналів датчиків кутової швидкості, механічно сполучених з стабілізатором системи озброєння Виходи суматорів сигналів керування підключені до входів блока керування системи стабілізації, внаслідок чого, привід пристрою переміщає систему озброєння та прицільний блок у напрямку на враховане положення ЦІЛІ, ЩО рухається Внаслідок того, що найбільш часто вживаним варіантом блоку стеження є телевізійний монітор, зображення на екрані якого спостерігається оператором, до обмежувальної частини формули винаходу введені, як ВІДОМІ і найбільш часто вживані у системах прицілювання за допомогою телевізійних камер або тепловізорів (див , наприклад, пат США № 4922801 "Система управління вогнем" МКВ F41G 3/08, НКВ 89 /41 05 від 01 081989р) телевізійний монітор та ручний пульт керування системою стабілізації, за допомогою якого оператор знаходить ціль і попередньо сполучує зображення ЦІЛІ з прицільною маркою пристрою При цьому вихід пульта керування підключений по кожній із координат з входом суматора сигналів кутового неузгодження Відомим Є також застосування у системі керування вогнем також вузлів управління системою озброєння, сполучених з системою озброєння, а також вузлів прийому сигналів системи озброєння До таких вузлів відносяться електричні спускові пристрої, лічильники набоїв, керуючі двигуни системи озброєння, датчики перебування системи озброєння у стані готовності або неготовності до ведення пострілів, тощо ВІДОМІ вузли входять до складу стандартної бойової машини піхоти БМП Посилання на наявність таких вузлів є у патентах Роси № 2138757 МКВ F41G 5/14 публ 27 09 99р , № 2133432 МКВ F41G 5/14 публ 07 07 98р , а також у статті "Оптико-телевизионная система прицеливания и управления вооружением модернизированной БМП-1", авторів EH Глущенко, Л И Демченко, Л И Лисица, В И Марцинюк, "Артиллерийское и стрелковое вооружение", № 3 , 2001 р стор 59 - 62 Таким чином, застосування вузла управління системою озброєння, а також вузла прийому сигналів датчиків у пристрої, що заявляється, винесено до обмежувальної частини формули винаходу Недоліком відомого пристрою є відсутність можливості наведення на ціль далекоміра, оптична ось якого повинна бути визначена у полі зору телевізійної камери прицільного блоку і положення якої повинно бути стабілізоване у напрямку на ціль у разі руху носія системи озброєння Відсутність у відомому пристрої далекоміра, чи інших засобів вимірювання дистанції не дає можливості здійснювати оперативний контроль та корегування кутового положення осі прицілювання в залежності від дистанції до ЦІЛІ 48905 Внаслідок зазначеного, діапазон застосування пристрою - прототипу обмежений дистанцією прямого пострілу Механічне додавання далекоміра до складу прицілу шляхом його розташування в прицільному блоці разом з телевізійною камерою неефективне, оскільки вирахуване положення осі прицілювання відомого пристрою не завжди співпадає з кутовим положенням ЦІЛІ і залежить від дистанції до ЦІЛІ, кутової швидкості ЦІЛІ, кутів розвороту носія та системи озброєння, тощо При цьому ось гармати і механічно сполучена з віссю гармати ось телевізійної камери і далекоміру прицілу при роботі у балістичному режимі наведення не перетинає ціль, внаслідок чого оператор під час наведення системи озброєння не має можливості за допомогою відомого пристрою-прототипу і здійснювати наведення системи озброєння за фіксованим положенням прицільної марки у полі зору телевізійної системи і оперативно вимірювати дистанцію до ЦІЛІ за допомогою далекоміру Ще одним недоліком пристрою - прототипу є неврахування кінцевої відстані - бази між віссю озброєння, наприклад, віссю гармати та віссю прицілу, зокрема, віссю телекамери, а також відсутність можливості застосування різних типів озброєння, кожний із яких відрізняється, наприклад, значеннями швидкості снаряду, балістичною дальністю пострілу, деривацією та іншими параметрами Іншими недоліками пристрою - прототипу є неврахування кутів нахилу (крен, тангаж) носія прицілу, неврахування метеорологічних параметрів, наприклад швидкості вітру, тиску та температури повітря, кута підвищення ЦІЛІ ВІДНОСНО прицілу і системи озброєння, відносної швидкості руху носія і ЦІЛІ Усі перераховані недоліки зменшують точність наведення прицілу та точність наведення систем озброєння носія у напрямку на враховане положення ЦІЛІ Ще одним недоліком пристрою прототипу є неврахування додатків до кутового положення прицільної марки, пов'язаних з можливою зміною масштабу зображення, що формується телевізійною камерою прицільного блоку В загальному випадку, прицільний блок може містити засоби для зміни масштабу зображення під дією керуючого сигналу, що є відомою ознакою, див , наприклад, приціл з трьома полями зору згідно з заявкою Великобританії № 1470753 МКВ G01S 3/78 публ 22 02 1977 р У разі використання прицілу з змінними полями зору, переміщення прицільної марки на екрані телевізійного монітору повинно бути скореговане у ВІДПОВІДНІСТЬ ДО перерахованих факторів з урахуванням кута поля зору телевізійної камери прицілу для забезпечення точності наведення прицілу на враховане упереджене положення ЦІЛІ Потрібен пристрій, який дозволяв би враховувати додатки на кутове положення осі прицілу, у тому числі додатки, пов'язані з врахуванням кутів нахилу носія, кута підвищення ЦІЛІ, кутової швидкості ЦІЛІ в вертикальному і горизонтальному напрямках, дистанції до ЦІЛІ, величини бази між віссю прицілу та віссю конкретного вибраного типу озброєння, масштабного фактору телевізійних камер, швидкості носія, метеорологічних факторів, балістичних даних і деривації вибраного типу 8 озброєння, формувати прицільні марки далекоміра та, принаймні, одного вибраного типу озброєння з урахуванням перелічених факторів з забезпеченням двокоординатного керованого переміщення прицільної марки типа озброєння на екрані телевізійного монітора, забезпечувати автоматичну стабілізацію осі вибраного типу озброєння у напрямку, що позначається сформованим положенням прицільної марки і стабілізацію осі далекоміра у напрямку на ціль, а також забезпечувати автоматичне і оперативне вимірювання дистанції до ЦІЛІ Велика КІЛЬКІСТЬ факторів, які впливають на враховане положення прицільної марки у системах, що містять спільний привід для наведення прицілу і системи озброєння, у тому числі факторів, що мають взаємний вплив, потребують врахування розгалуженої системи зв'язків між кожним із додатків, що може бути зроблено лише за допомогою обчислювальних систем В основу винаходу поставлено задачу підвищення точності наведення прицілу та систем озброєння носія за рахунок введення щонайменше, як двох прицільних марок - далекоміра та типу озброєння з одночасним використанням режиму автоматичного переміщення прицільної марки вибраного типу озброєння носія відносно двох координат в залежності від сукупної дії параметрів, у тому числі параметрів розташування і руху носія, ЦІЛІ та метеорологічних факторів, вибраного типа озброєння, величини бази вибраного типу озброєння відносно прицільного блоку та значення поля зору прицільного блоку Поставлена задача вирішується тим, що у відомий пристрій-прототип, що містить механічно сполучені з системою озброєння носія двокоординатний привід, датчики кутової швидкості системи озброєння відносно двох осей X та У та прицільний блок, до складу якого входить принаймні один прилад спостереження та далекомір, підключені до системи озброєння носія вузол управління системою озброєння носія та вузол прийому сигналів системи озброєння, а також телевізійний монітор, пульт керування, двоканальний блок керування приводом та двоканальний суматор сигналів керування, перші входи якого по кожній координаті підключені до виходів датчиків кутової швидкості, другі входи суматора сигналів керування підключені по кожній із координат до виходів пульта керування, виходи суматорів сигналів керування по кожній із координат підключені до керуючих входів блока керування приводами, виходи якого по кожній координаті підключені до керуючих входів приводу додатково введені обчислювач з вузлом пам'яті, двоканальний перетворювач напруги у код, вузол формування відеосигналу, суматор відеосигналів, вузол управління приладами спостереження прицільного блоку, перемикач приладів спостереження, перемикач типу озброєння, при цьому виходи датчиків кутової швидкості по кожній із координат підключені до входів каналів перетворювача напруги у код, вихід перетворювача напруги у код підключений до першого входу обчислювача, вимірювальний вихід далекоміра прицільного блоку підключений до другого входу обчислювача, вихід перемикача типу озброєння підключений до третього входу обчислювача, вихід перемикача 48905 приладів спостереження підключений до четвертого входу обчислювача, перший вихід обчислювача підключений до входу вузла формування відеосигналу, другий вихід обчислювача підключений до входу вузла управління приладами спостереження, третій вихід обчислювача підключений до входу вузла управління системою озброєння, інформаційний вихід прицільного блоку підключений до першого входу суматора відеосигналів та синхронізуючого входу вузла формування відеосигналу, вихід вузла формування відеосигналу підключений до другого входу суматора відеосигналів, вихід суматора відеосигналів підключений до входу телевізійного монітора, вихід вузла управління приладами спостереження підключений до керуючого входу прицільного блоку, вихід вузла прийому сигналів системи озброєння підключений до п'ятого входу обчислювача, а вузол формування видеосигналу виконаний з можливістю формування не менше, як двох прицільних марок, у тому числі прицільної марки далекоміра і прицільної марки типу озброєння Крім того, пристрій має хоча б один датчик кутів нахилу носія та хоча б один датчик кутів орієнтації осі системи озброєння носія та вузол прийому сигналів датчиків носія, при цьому вихід датчика кутів нахилу носія підключений до першого входу вузла прийому сигналів датчиків, вихід датчика кутів орієнтації осі системи озброєння носія підключений до другого входу вузла прийому сигналів датчиків а вихід вузла прийому сигналів датчиків підключений до шостого входу обчислювача Крім того, пристрій має датчик хоча б одного із метеорологічних параметрів, у числі яких є швидкість та напрямок вітру, ЩІЛЬНІСТЬ повітря, температура повітря, тиск і вологість повітря, при цьому вихід датчика параметрів навколишнього середовища підключений до третього входу вузла прийому сигналів датчиків носія Крім того, пристрій має датчик швидкості і напрямку руху носія, вихід якого підключений до сьомого входу обчислювача Крім того, пристрій додатково містить вузол реєстрації видеосигналу, вузол установки та перемикання зон захвату та вузол формування сигналів корекції кутового положення, при цьому вхід вузла реєстрації відеосигналу підключений до першого входу суматора відеосигналів, вихід вузла реєстрації відеосигналу підключений до входу 1-1 обчислювача, вихід вузла установки та перемикання зон захвату відеосигналу підключений до 2-1 входу обчислювача, вхід вузла формування сигналів корекції кутового положення підключений до четвертого виходу обчислювача, а вихід вузла формування сигналів корекції кутового положення по кожній із координат підключений до третіх входів суматора сигналів керування Суть винаходу полягає у тому, що за рахунок введення у пристрій обчислювача з блоком пам'яті за умови підключення до входів обчислювача перетворювача напруги у код з одночасним підключенням до виходу обчислювача вузла формування відеосигналу і суматора відеосигналів, а також підключенням входів перетворювача напруги у код до виходів датчиків кутової швидкості при одноча 10 сному урахуванні дистанції до ЦІЛІ реалізований режим відтворення на екрані телевізійного монітору зображення двох прицільних марок, які накладені на зображення фону та ЦІЛІ, кожна з яких має керований зсув відносно двох координат екрану телевізійного монітору Зображення прицільної марки далекоміру при цьому відповідає кутовому положенню осі далекоміра у полі зору кожного з приладів спостереження прицільного блоку Зображення прицільної марки вибраного типу озброєння відповідає врахованому кутовому положенню осі озброєння відносно напрямку на ціль Значення просторового зсуву прицільної марки враховує кутову швидкість ЦІЛІ відносно системи керування вогнем, значення дистанції до ЦІЛІ, вибраний тип озброєння, значення кута поля зору застосованого приладу спостереження прицільного блоку, значення просторової бази між віссю системи озброєння та віссю приладу спостереження Введення до складу системи перемикача типу озброєння та перемикача приладів спостереження розширює функціональні можливості пристрою і сприяє підвищенню точності наведення у разі використання приладів спостереження з різними кутами поля зору та різних типів озброєння, у тому числі типів озброєння, що мають різні значення бази розташування відносно вибраних приладів спостереження та різні балістичні характеристики Підключення до обчислювача вузла управління системою озброєння та вузла прийому сигналів системи озброєння дозволяє узгодити кероване переміщення прицільної марки, розраховане для вибраного типу озброєння з застосованим типом озброєння і уникнути помилок у виборі і контролі обраного типа зброї, що наводиться за допомогою пристрою Об'єднання у одному обчислювачі функцій управління (відносно ДВОХ координат) положенням прицільної марки для обраного типу озброєння і формування (за допомогою вузла формування сигналів управління системою озброєння) сигналів управління вибраним типом озброєння дозволяє підвищити точність наведення вибраного типу озброєння на ціль Формування окремої прицільної марки далекоміра дозволяє визначити на екрані телевізійного монітору положення осі далекоміра і сполучати її з зображенням ЦІЛІ, внаслідок чого з'являється можливість оперативного переходу від режиму вимірювання дистанції до режиму наведення озброєння на ціль Врахування всіх перелічених факторів підвищує точність наведення системи озброєння у напрямку на вирахуване положення ЦІЛІ І ДОЗВОЛЯЄ досягнути поставленої перед винаходом задачі Введення до складу пристрою згідно з другим пунктом формули винаходу вузла прийому сигналів датчиків носія та датчика кутів нахилу носія та датчика кутів орієнтації системи озброєння, підключених за допомогою вузла прийому сигналів датчиків до шостого входу обчислювача дозволяє врахувати за допомогою обчислювача вплив кутового положення носія (крен, тангаж) та кутового розвороту системи озброєння носія на положення прицільної марки і сформувати на екрані телевізійного монітору системи прицільну марку із скорегованим відносно двох координат у ВІДПОВІДНІСТЬ до зазначених кутів просторовим положенням, що 12 11 48905 підвищує точність наведення системи озброєння ложення прицільних марок далекоміра і застосона ЦІЛІ, у тому числі на ЦІЛІ, ЩО розташовані під ваної системи озброєння визначається різними кутами підвищення відносно системи кеобчислювачем і формується у вигляді телевізійнорування, що заявляється го сигналу вузлом формування відеосигналів системи Просторове положення прицільної марки Введення до складу пристрою згідно з третім далекоміра визначає положення осі далекоміра в пунктом формули винаходу датчика хоча б одного полі зору кожного з приладів спостереження приіз метеорологічних параметрів, у числі яких є швицільного блоку Просторове положення прицільної дкість та напрямок вітру, ЩІЛЬНІСТЬ повітря, темпемарки системи озброєння враховує кутову швидратура повітря, тиск і вологість повітря, з одночаскість та дистанцію до ЦІЛІ, кути нахилу носія і сисним підключенням виходу датчика через вузол теми озброєння, застосований тип приладу споприйому сигналів датчиків носія до шостого входу стереження, параметри навколишнього обчислювача, дозволяє врахувати за допомогою середовища, у тому числі напрямок і швидкість обчислювача вплив метеорологічних факторів, вітру, наявність кінцевої бази між віссю прицілу і наприклад, вітру на положення прицільної марки і застосованим типом системи озброєння, балістичсформувати прицільну марку на екрані телевізійні дані і деривацію застосованого типу системи ного монітору системи із скорегованим відносно озброєння, а також напрямок і швидкість руху нодвох координат просторовим положенням у ВІДПОсія Застосування вузлів автоматичної обробки ВІДНІСТЬ до напрямку і швидкості вітру та іншими відеосигналу разом із обчислювачем та вузлом метеорологічними параметрами, що підвищує точформування сигналів корекції кутового положення ність наведення системи озброєння на ціль дозволяє автоматично наводити і стабілізувати у Введення до складу системи, що заявляється напрямку на ціль ось далекоміра або ось системи згідно з четвертим пунктом формули винаходу озброєння носія в залежності від положення передатчика швидкості і напрямку руху носія з одночамикачів пульта або положення перемикача вузла сним підключенням виходу датчика до сьомого установки та перемикання зон захвату Застосувходу обчислювача дозволяє врахувати за доповання пристрою забезпечує підвищення точності могою обчислювача вплив руху носія відносно ЦІЛІ наведення систем озброєння на ціль і вирішує І сформувати прицільну марку із скорегованим у задачу винаходу ВІДПОВІДНОСТІ до напрямку і швидкості руху носія просторовим положенням на екрані телевізійного Фігура 1 Функціональна схема системи керумонітору, що підвищує точність наведення систевання вогнем, що виконана у ВІДПОВІДНОСТІ ДО ми озброєння на положення ЦІЛІ першого пункту формули винаходу Введення до складу пристрою згідно з п'ятим 1 - прицільний блок, 11 — 1 м - прилади спостепунктом формули винаходу вузла реєстрації відреження, 2 - далекомір, 3 - комутатор, 4 - ствол еосигналу, що зв'язаний з обчислювачем і підклюгармати системи озброєння носія, d - ось ствола чений до першого входу суматора відеосигналів, гармати, 5-Х та 5-У датчики кутової швидкості сисдозволяє автоматично визначати координати ЦІЛІ теми озброєння, ВІДПОВІДНО відносно осей X та У ВІДНОСНО положення прицільних марок в відеосиг(азимут та кут місця), 6 - двокоординатний привід, налі, що сформований прицільним блоком систе7 -двоканальний блок керування приводом, 8 ми Введення до складу системи вузла установки двоканальний суматор сигналів керування, 9 та перемикання зон захвату відеосигналу дозвопульт керування, 10 - телевізійний монітор, 11 ляє установлювати зони захвата відносно вибраобчислювач з вузлом пам'яті ВП, 12 - перетворюних оператором цілей, автоматично виміряти відвач напруги у код, 13 - перемикач типу озброєння, носне просторове і кутове неузгодження ЦІЛІ 14 - перемикач приладів спостереження, 15 - вувідносно прицільної марки застосованого типу зол формування відеосигналу, 16 - суматор відеоозброєння або відносно прицільної марки далекосигналів, 17 - вузол управління системою озброєнміра, визначати розмір зони захвату відеосигналу, ня носія, 18 - вузол управління приладами а також забезпечити автоматичне, без контролю з спостереження прицільного блоку, 19 - вузол прибоку оператора перемикання між режимом вимійму сигналів системи озброєння, Івих - інформарювання дистанції до ЦІЛІ та режимом наведення ційний вихід прицільного блоку 1, Квх - керуючий обраного типу озброєння носія на ціль Введення вхід інформаційного блоку 1, С -синхронізуючий до складу пристрою вузла формування сигналів вхід вузла 15 формування відеосигналу, Кг - керукорекції кутового положення, вхід якого підключеючий вхід гармати 4, стрілкою 20 показане полоний до виходу обчислювача, а вихід підключений ження та напрямок дії оператора системи керудо входів суматора сигналів керування дозволяє вання вогнем автоматично супроводжувати, наводити і стабіліФігура 2 Функціональна схема системи керузувати у напрямку на ціль далекомір або обраний вання вогнем, що виконана згідно з другим - четтип озброєння, що підвищує точність наведення вертим пунктами формули винаходу вибраного типу озброєння носія, а також далеко21 - вузол прийому сигналів датчиків носія, 22 міра на положення ЦІЛІ І скорочує час наведення - датчик кутів нахилу носія, 23 - датчик кутів орієнсистеми озброєння тації осі системи озброєння носія, 24 - датчик метеорологічних параметрів, 25 - датчик швидкості і Введення нових ознак у взаємозв'язку з відонапрямку руху носія Фігура 3 Функціональна схемими ознаками дозволяє вирішити задачу винахома системи керування вогнем, що виконана згідно ду шляхом формування на екрані телевізійного з п'ятим пунктом формули винаходу монітору прицільних марок далекоміра та системи озброєння носія з керованим просторовим поло26 - вузол реєстрації відеосигналу, 27 - вузол женням вздовж двох координат Просторове поустановки та перемикання зон захвату відеосигна 14 13 48905 лу, 28 - вузол формування сигналів корекції кутозвязаних з кутом підвищення ЦІЛІ на положення вого положення, ХЗ, УЗ - входи суматора 8 по коосі системи озброєння у разі виконання системи ординатах X та У, ВІДПОВІДНО згідно з другим пунктом формули винаходу Фігура 4 34 - положення ЦІЛІ на дистанції L1 при нульоСхематичне зображення екрану телевізійного вому куті підвищення ЦІЛІ, 35 -положення ЦІЛІ на монітора спільно з зображенням прицільних марок дистанції L1 на висоті Н, уН - кут підвищення ЦІЛІ далекоміра і типу озброєння системи з урахуванВІДНОСНО прицілу, 36 - положення носія системи ням додатків до кутового положення прицільної озброєння, рі_1 - кут підвищення системи озброєнмарки ня у разі наведення на ціль 34, рі_2 - кут підвищен29- зображення ЦІЛІ на екрані телевізійного ня системи озброєння у разі наведення на ціль 35, монітора, ЗО - зображення прицільної марки далеL2 - еквівалентна дистанція наведення системи коміра, ад та Рд - кутові координати прицільної озброєння, 37-1 та 37-2 кутові положення осі сисмарки далекоміра в системі координат телевізійнотеми озброєння, 38-1 та 38-2- траєкторії руху снаго зображення, 31- положення прицільної марки рядів осі зброї, аО та рО - початкові координати прицільФігура 7 Схематичне зображення вплину ураної марки осі вибраного типа зброї в системі коорхування додатків до положення прицільної марки, динат телевізійного зображення, pL-вирахуваний зв'язаних з впливом метеорологічних факторів на кут балістичного зниження снаряду для вибраного положення осі системи озброєння у разі виконання типу зброї, 32 - положення прицільної марки осі системи згідно з третім пунктом формули винахозброї з урахуванням кута балістичного зниження, ДУ сох та coy - кутові швидкості руху ЦІЛІ ВЗДОВЖ коор34 - положення ЦІЛІ на дистанції L1, 36 - полодинат X та У, а(сох), Р(соу) - кутові додатки до поження носія системи озброєння, Vr - горизонтальложення прицільної марки, зв'язані з кутовим руна складова швидкості вітру, 39-1 та 39-2 кутові хом ЦІЛІ вздовж координат X та У, 33 - положення положення осі системи озброєння, 40-1, 40-2 та прицільної марки зброї з урахуванням руху ЦІЛІ та 40-3 траєкторії руху снарядів, рі та р2 - кути наведення осі системи озброєння балістичного зниження, аб та рб - вирахувані кутові додатки до положення прицільної марки вибраФігура 8 Схематичне зображення вплину ураного типу зброї зв'язані з наявністю бази між віссю хування додатків до положення прицільної марки, зв'язаних з рухом носія на положення осі озброєнзброї та віссю прицілу, ац та рц - вирахувані кутові ня у разі виконання системи згідно з четвертим координати прицільної марки в системі координат пунктом формули винаходу 34 та 34-1 - положентелевізійного зображення, 34 - положення приціня ЦІЛІ, \/ц - горизонтальна складова швидкості льної марки зброї з урахуванням руху ЦІЛІ, балісЦІЛІ, VH - горизонтальна складова швидкості носія, тичного зниження та за наявністю бази між віссю 36 та 36-1 - положення носія, L1 та L2 - дистанція зброї та віссю прицілу, 29-1 положення ЦІЛІ на екміж носієм та ціллю, 39 та 39-1 - кутові положення рані телевізійного монітору при наведенні системи осі системи озброєння, рі_І, рі_2 - кути наведення озброєння на ціль осі системи озброєння, 40 та 40-1 -траєкторії руху Фігура 5 Схематичне зображення екрану теснарядів левізійного монітора спільно з зображенням приціФігура 9 Схематичне зображення екрану тельної марки системи озброєння у разі виконання левізійного монітора у разі виконання пристрою системи згідно з другим пунктом формули винахозгідно з п'ятим пунктом формули винаходу ду за умови розташування носія системи озброєн29, 29-Д, 29-1 та 29-2 - зображення ЦІЛІ, ЗО ня під ненульовим кутом крена відносно поверхні марка далекоміра, 34-прицільна марка зброї, 41 X, У - координати системи розгортки телевізійзона супроводження ЦІЛІ далекоміром, 42 - зона ного монітору, Х1.У1 - напрямок горизонтальної та супроводження ЦІЛІ вибраним типом зброї вертикальної координат в просторі розташування На Фіг 1 показана функціональна схема сисЦІЛІ, cpz - кут розпороту носія (кут крену) відносно теми керування вогнем, що заявляється згідно з горизонтальної поверхні, окр, рср - кутові додатки до першим пунктом формули винаходу Система має початкового положення аО, рО прицільної марки, прицільний блок 1, що складається з приладів що зв'язані з наявністю кута крену (pz та кута баліспостереження 1і 1м, далекоміра 2 та комутатора стичного зниження снаряду для вибраного типу З Прицільний блок 1 механічно сполучений з сисзброї, 32-1 - положення прицільної марки обраного темою озброєння носія, наприклад гарматою 4, типа озброєння з урахуванням кута крену та кута ось ствола якої позначена на Фіг 1 позицією Оі балістичного зниження снаряду рі_, 32-2 положенСистема озброєння носія може мати також ІНШІ ня прицільної марки обраного типа озброєння з компоненти, наприклад, кулемет, гранатомет, які з урахуванням кута крену та кута балістичного зниметою спрощення не показані на Фіг 1 Позицією ження снаряду рі_2, соХІ - кутова швидкість руху Кг позначений керуючий вхід гармати ІнформаЦІЛІ відносно горизонтальної поверхні вздовж коційні входи комутатора 3 підключені до виходів ординати Х1, ац1 та Рц1 - вирахувані кутові коорприладів спостереження 1і 1м, У якості яких викодинати прицільної марки вибраного типу зброї у ристані, наприклад, телевізійні камери з кутами разі, 33-1 просторове положення прицільної марки поля зору, що відрізняються один від одного вибраного типу зброї у разі руху ЦІЛІ З кутовою Окрім цього, у якості одного з приладів спостерешвидкістю соХ1 за наявністю кута крену (pz та кута ження може бути використаний тепловізор Вихід рі_ балістичного зниження снаряду комутатора 3 є інформаційним виходом Івих прицільного блоку 1, керуючий вхід Квх комутатора 3 є Фігура 6 Схематичне зображення вплину уракеруючим входом прицільного блоку, вимірювальхування додатків до положення прицільної марки, 15 16 У разі виконання системи керування вогнем згідно з п'ятим пунктом формули винаходу, система керування вогнем (див Фіг 3) додатково включає до свого складу вузол 26 реєстрації відеосигналу, вузол 27 установки та перемикання зон захвату та вузол 27 формування сигналів корекції кутового положення Вхід вузла 26 реєстрації відеосигналу підключений до першого входу суматора відеосигналів, вихід вузла реєстрації відеосигналу підключений до 1-1 входу обчислювача 11 Вузол 27 управління зонами захвату відеосигналу підключений до 2-1 входу обчислювача 11 Вхід вузла 28 формування сигналів корекції кутового положення підключений до четвертого виходу обчислювача 11, а вихід вузла формування сигналів корекції кутового положення по кожній із координат X та У підключений до третіх входів ХЗ та УЗ суматора 8 сигналів керування Пристрій працює таким чином 48905 ний вихід далекоміра 2 є вимірювальним виходом прицільного блоку 1 Крім прицільного блоку 1 з системою озброєння механічно сполучені також датчики 5-Х та 5-У кутової швидкості осі системи озброєння відносно осей X та У та двокоординатний привід 6 повороту системи озброєння, наприклад гармати 4 відносно осей X та У Виходи датчиків 5-Х та 5-У кутової швидкості підключені до входів X та У двоканального перетворювача 12 напруги у код Крім того, виходи датчиків 5-Х та 5У кутової швидкості підключені до входів Х1 та У1 суматора 8 сигналів керування Другі входи Х2 та У2 суматора 8 сигналів керування підключені до виходів пульта 9 Система керування вогнем має також обчислювач 11 з вузлом пам'яті ВП Перший вхід обчислювача 11 підключений до виходу двоканального перетворювача 12 напруги у код, вихід далекоміра 2 прицільного блоку 1 підключений до другого входу обчислювача 11 Вихід перемикача 13 типу озброєння підключений до третього входу обчислювача 11, вихід перемикача 14 приладів спостереження підключений до четвертого входу обчислювача 11 Вихід вузла 19 прийому сигналів системи озброєння підключений до п'ятого входу обчислювача 11 Перший вихід обчислювача 11 підключений до входу вузла 15 формування відеосигналу, другий вихід обчислювача 11 підключений до входу вузла 18 управління приладами спостереження, вихід вузла 18 підключений до керуючого входу Квх прицільного блоку 1 Третій вихід обчислювача 11 підключений до входу вузла 17 управління системою озброєння носія, вихід вузла 17 підключений до керуючих входів системи озброєння носія, зокрема до керуючого входу Кг гармати 4, а також до інших типів зброї носія Зворотні сигнали від системи озброєння носія підключені до входу вузла 19 прийому сигналів системи озброєння Інформаційний вихід Івих прицільного блоку 1 підключений до першого входу суматора 16 відеосигналів та синхронізуючого входу С вузла 15 формування відеосигналу, вихід вузла 15 підключений до другого входу суматора 16 відеосигналів, вихід суматора 16 відеосигналів підключений до входу телевізійного монітора 10 У разі виконання системи керування вогнем згідно з другим пунктом формули винаходу, система керування вогнем (див Фіг 2) додатково включає до свого складу вузол 21 прийому сигналів датчиків носія, вихід якого підключений до шостого входу обчислювача 11, датчик 22 кутів нахилу носія та датчик 23 кутів орієнтації осі системи озброєння носія, виходи яких підключені, ВІДПОВІДНО до першого та другого входів вузла 21 прийому сигналів датчиків носія У разі виконання системи керування вогнем згідно з третім пунктом формули винаходу, система керування вогнем (див Фіг 2) додатково включає до свого складу датчик 24 метеорологічних параметрів, вихід якого підключений до третього входу вузла 21 прийому сигналів датчиків У разі виконання системи керування вогнем згідно з четвертим пунктом формули винаходу, система керування вогнем (див Фіг 2) додатково включає до свого складу датчик 25 швидкості і напрямку руху носія, вихід якого підключений до сьомого входу обчислювача 11 Оператор за допомогою перемикача 14 приладів спостереження (див Фіг 1) формує керуючий сигнал, який надходить до четвертого входу обчислювача 11, під дією якого обчислювач формує сигнал підключення обраного номера приладу спостереження, наприклад, приладу спостереження 1і Під ДІЄЮ сигналу підключення, що формується обчислювачем на другому виході і який надходить до входу вузла 18 управління приладами спостереження, вузол 18 формує команду підключення, що через керуючий вхід Квх прицільного блоку 1 надходить до керуючого входу комутатора З Під ДІЄЮ команди підключення комутатор 3 підключає вихід вибраного приладу спостереження, наприклад, приладу спостереження 1і до інформаційного виходу Івих прицільного блоку Окрім цього, за допомогою сигналів керування, що надходять з виходу вузла 18 оператор має можливість управляти режимами роботи приладів спостереження, наприклад, приладу спостереження її шляхом введення керованих режимів обробки, зміни поля зору, тощо Зображення навколишньої місцевості та ЦІЛІ, що знаходяться у полі зору приладу спостереження перетворюється за допомогою приладу спостереження 1і у відеосигнал Відеосигнал надходить на перший вхід суматора 16 відеосигналів, після чого відеосигнал надходить на вхід телевізійного монітору 10, де відтворюється зображення місцевості та ЦІЛІ Одночасно, обчислювач 11 за допомогою вузла 15 формує зображення прицільної марки далекоміра Кутове положення ад, Рд (вздовж двох координат розгортай телевізійного монітору) прицільної марки ЗО далекоміра (див Фіг 4) відносно осі ввімкненого приладу спостереження 11 знаходиться у вузлі пам'яті ВП обчислювача і зчитується обчислювачем під час дії керуючого сигналу, який надходить до четвертого входу обчислювача 11 з виходу вузла 14 Занесення значень кутового положення осі далекоміра до вузла пам'яті ВП здійснюється під час настройки пристроїв системи озброєння Занесене у пам'ять вузла 15 (див Фіг 1) кутове положення прицільної марки далекоміра перетворюється вузлом 15 формування відеосигналу у відеосигнал, що надходить до другого входу суматора 16, де додається до відеосигналу, що містить зображення ЦІЛІ Синхронізація відеосигналу прицільної марки да 17 48905 лекоміра та відеосигналу, що сформований приладом спостереження її досягається шляхом підключення відеосигналу з виходу приладу спостереження і який надходить до першого входу суматора 16 до синхронізуючого входу С блока 15 формування відеосигналу Таким чином, за умови підключення приладу спостереження її, а також і будь-якого іншого, оператор спостерігає на екрані телевізійного монітору одночасно зображення ЦІЛІ 29 та зображення ЗО прицільної марки далекоміру, кутове положення якої вздовж двох координат розгортки сформоване обчислювачем 11 з урахуванням кута поля зору приладу спостереження та значення кутової неузгодженості осі далекоміра відносно осі підключеного приладу спостереження Спостерігаючи просторове положення прицільної марки далекоміра відносно ЦІЛІ на екрані телевізійного монітору 10 оператор за допомогою пульта 9 формує сигнали керування кутовим положенням осі системи озброєння і прицільного блоку, що надходять до входів Х2, Y2 суматора 8 3 виходу суматора 8 сигнали керування Хс, Yc відносно двох осей надходять через блок 7 керування приводом до керуючих входів X, У привода 6 Під дією сигналів керування привід 6 переміщає ось d системи озброєння Одночасно з системою озброєння переміщається і ось прицільного блоку 1, внаслідок чого переміщається зображення ЦІЛІ на екрані телевізійного монітору 10 Сполучаючи прицільну марку далекоміра ЗО з зображенням ЦІЛІ 29, оператор за допомогою вузлів управління далекоміром (не показані) здійснює вимірювання дистанції до ЦІЛІ Код виміряної дистанції надходить з виходу далекоміра 2 до другого входу обчислювача 11 За допомогою перемикача 13 типу озброєння оператор вибирає потрібний тип озброєння, наприклад, гармату 4 Водночас, під час супроводження ЦІЛІ сигнали з виходів датчиків кутової швидкості 5X, 5-У надходять до перших входів Х 1 , Y1 суматора 8 У разі кутових коливань осі d системи озброєння від направлення на ціль, наприклад, внаслідок руху носія, сигнали з виходів датчиків 5X та 5-У коливаються, при цьому значення з виходів датчиків додаються у суматорі 8 до сигналів, що сформовані оператором і які надходять до других входів X2.Y2 суматора 8 Додання сигналів у суматорі забезпечує стабілізацію кутового положення осі далекоміра у напрямку на ціль Під час наведення далекоміра на ціль, сигнали з виходів датчиків 5-Х та 5-У кутової швидкості одночасно надходять також на входи X та У перетворювача 12 напруги у код Перетворені у числові величини, значення кутової швидкості осі прицілу відносно двох осей X та У надходять до першого входу обчислювача Обчислювач 11 виділяє ПОСТІЙНІ складові сох, coy кутової швидкості, що пов'язані з кутовим переміщенням ЦІЛІ відносно системи озброєння і вираховує додатки до початкового кутового положення прицільної марки обраного типу озброєння Значення додатків залежать від виміряної далекоміром дистанції L до ЦІЛІ, кутової швидкості ЦІЛІ сох, coy, а також від значення бази для обраного типу озброєння відносно обраного приладу спостереження прицілу і балістичних характеристик обраних набоїв Вирахувані додатки додаються обчислювачем до зчитаного з пам'яті 18 початкового вздовж обох координат X та У (див Фіг 4) кутового положення аО, рО осі системи озброєння, що було занесене у блок пам'яті під час настройки пристроїв системи озброєння Процес вирахування додатків та зміни положення прицільної марки обраного типу зброї ілюстрований на Фіг 4, де початкове положення осі системи озброєння має позицію 31 з координатами аО, рО У разі, коли додаток, зв'язаний з балістичним зниженням до положення осі вибраного типу озброєння складає величину рі_, то положення прицільної марки обраного типу озброєння під дією сигналу обчислювача переміщається з початкового положення 31 (див Фіг 4), що має кутові координати аО, рО до положення 32, що має кутові координати аО, рО + рі_, ВІДПОВІДНО вздовж осей X та У Значення поправки рі_ визначається на основі балістичних даних застосованих набоїв для обраного типу зброї та виміряної дистанції L до ЦІЛІ При наявності кутового руху ЦІЛІ ВІДНОСНО системи озброєння з швидкостями сох, coy (ВІДПОВІДНО вздовж осей X та У) обчислювач додатково переміщає прицільну марку в напрямку руху ЦІЛІ на величини а(сох) Р(соу), які залежить від значень кутових швидкостей ЦІЛІ сох, coy вздовж осей X та У, виміряної дистанції L та характеристик застосованих набоїв для обраного типу озброєння При цьому прицільна марка переміщується вздовж двох координат телевізійного монітора і займає положення 33, яке має кутові додатки до початкового положення 3 1 , що дорівнюють вздовж осей X та У, ВІДПОВІДНО а(х) = аО + а(сох), р(у) = рО + рі_ + р( ю у), Нарешті, у разі наявності бази І_х, І_у між віссю озброєння та віссю приладу спостереження, обчислювач додатково переміщає прицільну марку вздовж осей X та У на величини аб, рб, що вираховуються обчислювачем 11 в залежності від виміряної дистанції до ЦІЛІ, при цьому значення бази, а також балістичні характеристики обраного типу озброєння зчитуються обчислювачем з блока пам'яті ВП Вирахуване кутове положення осі обраного за допомогою перемикача 13 типу озброєння, наприклад, гармати складає ац = аО + а(сох) + а2, Рц = рО + рі_ + Р(соу) + р2 Значення кутового положення прицільної марки видається з першого виходу обчислювача 11 до вузла формування телевізійного сигналу 15 у вигляді координат телевізійного сигналу прицільної марки Перерахування кутових додатків ац, рц у просторові координати X, У положення прицільної марки на екрані телевізійного монітору здійснюється обчислювачем 11 з урахуванням поля зору вибраного за допомогою перемикача 14 приладу спостереження Відеосигнал прицільної марки для обраного типа озброєння формується вузлом 15 і надходить разом з відеосигналом, що містить прицільну марку далекоміра на другий вхід суматора 16 Оператор за допомогою пульта 10 сполучає прицільну марку обраного типу озброєння з зображенням ЦІЛІ, при цьому ціль займає позицію 291 (див Фіг 4) і вмикає за допомогою вузла 17 сигнал стрільби, який з виходу вузла 17 (див Фіг 1) надходить до керуючого входу гармати Кг і за яким здійснюється вмикання електроспуску гармати, чи 19 іншого озброєння носія Вибір типу озброєння, що ІНІЦІЮЄТЬСЯ вузлом 17 здійснюється вузлом 17 під дією керуючого сигналу, що надходить на вхід вузла 17 з третього виходу обчислювача 11, де він формується у ВІДПОВІДНІСТЬ до положення перемикача 13 типу озброєння Стан готовності обраного типу озброєння контролюється обчислювачем 11 за допомогою вузла 19 прийому сигналів системи озброєння, що сполучений з системою озброєння Таким чином, під час роботи системи озброєння на екрані телевізійного монітору формується дві прицільні марки - прицільна марка далекоміра та прицільна марка обраного типу озброєння Просторове положення кожної з марок корегується вздовж двох координат розгортки телевізійного монітору за допомогою обчислювача 11 Положення прицільної марки далекоміра враховує кутове положення осі далекоміра відносно осі обраного за допомогою перемикача 14 приладу спостереження і не змінюється при кутових розворотах системи озброєння і при ЗМІНІ дистанції до ЦІЛІ Положення прицільної марки обраного типу озброєння враховує кутову швидкість ЦІЛІ, дистанцію до ЦІЛІ, балістичні дані обраного за допомогою перемикача 13 типу озброєння, деривацію, наявність бази між віссю обраного типа озброєння та віссю приладу спостереження, та значення поля зору ввімкненого приладу спостереження У разі додаткового руху ЦІЛІ В напрямку носія, значення дистанції, що вимірюється далекоміром змінюється, внаслідок чого змінюються вирахувані кутові додатки до початкового положення осі озброєння і просторове положення прицільної марки озброєння на екрані телевізійного монітору У проміжок часу між окремими вимірюваннями дистанції діюче значення дистанції вираховується обчислювачем у вигляді прогнозованої величини, з урахуванням результатів попередніх вимірювань Числові показники додатків залежать від конкретних характеристик обраного типу озброєння і не являються предметом винаходу При ЗМІНІ перерахованих факторів прицільна марка обраного типу озброєння за допомогою обчислювача 11 та вузла 15 переміщується вздовж двох координат розгортки телевізійного монітору, що забезпечує підвищення точності наведення системи озброєння на ціль Робота пристрою, що виконаний згідно з другим пунктом формули винаходу аналогічна до роботи пристрою, що виконаний згідно з першим пунктом формули винаходу і яка наведена вище Наведення на ціль далекоміра шляхом сполучення прицільної марки далекоміра і вимірювання дистанції до ЦІЛІ та кутової швидкості ЦІЛІ не має ніяких відмінностей від описаного вище ВІДМІННІСТЬ складає лиш додаткове урахування до кутового положення прицільної марки обраного типу озброєння додатків, що пов'язані з наявністю кутів нахилу та кутів орієнтації системи озброєння носія Для урахування додатків сигнали (див Фіг 2) з виходів датчика 22 кутів нахилу носія, та датчика 23 кутів орієнтації системи озброєння надходять, ВІДПОВІДНО, на перший та другий вхід вузла 21 прийому сигналів датчиків носія, де нормалізуються і звідки зчитуються обчислювачем 11, шостий вхід якого підключений до виходу вузла 21 Обчислювач 11 вираховує додатки до кутового положення осі об 48905 20 раного типу озброєння і аналогічно до описаного вище процесу перемішає прицільну марку обраного типу озброєння вздовж двох координат розгортки телевізійного монітору Для прикладу розглянемо врахування додатків у разі наявності ВІДМІННОГО ВІД нуля куту крену носія cpz за умови розташування ЦІЛІ вздовж осі z розвороту носія У цьому випадку, зображення місцевості на екрані телевізійного монітору 10 (див Фіг 5) буде повернуте на кут cpz, при цьому напрямок координат Х1, У1 в системі координат розташування ЦІЛІ (Х1 - горизонтальна координата, У1 - вертикальна координата) буде розгорнутий на кут cpz відносно координат розгортки телевізійного монітору X, У Поворот зображення у разі неврахування кута крену призведе до того, що прицільна марка може бути сформована у некоректному положенні 32, що має вертикальним зсув рі_ вздовж координати У телевізійного монітору Реальний напрямок балістичне зниження співпадає з напрямком дм сил тяжіння, що відповідає напрямку вертикалі У1 3 урахуванням зазначеного, прицільна марка обраного типу зброї переміщується обчислювачем 11 відносно початкового положення аО, рО на величину рі_ вздовж напрямку осі У1 У системі координат X, У телевізійного монітору, зазначений зсув відповідає переміщенню марки у позицію 32-1, що має кутові додатки ац = рі_ х sin (cpz), 5ф = рі_ х cos (cpz) Таким чином, з урахуванням кута нахилу носія, прицільна марка буде переміщатися обчислювачем 11 по поверхні екрану телевізійного монітору і займати координати ац = аО + рі_ х sin (cpz), Рц = рО + рі_ х cos (cpz) Урахування кута нахилу носія призводить до підвищення точності наведення озброєння у разі нахилу носія У якості датчиків кута нахилу носія можуть бути застосовані датчики ВІДОМІ датчики гіровертикалі Більш коректний розгляд процесу наведення осі системи озброєння потребує врахування окрім кутів нахилу носія також врахування кутів орієнтації системи озброєння, оскільки на значення кута розвороту зображення мають вплив обидві комбінації кутів - кут нахилу носія та кут розвороту системи озброєння Так, наприклад, аналогічний за величиною зсув прицільної марки має місце при куті розвороту системи озброєння під прямим кутом до осі носія та наявності кута тангажу з величиною срх Повний розрахунок кутів корекції відноситься до області геометрії і не являється предметом винаходу Аналогічно до балістичного додатку, при наявності кутів розвороту носія обчислювачем 11 перераховуються всі ІНШІ додатки до кутового положення, кожний з яких розкладається на горизонтальну та вертикальну складову і окремо враховується при корекції положення прицільної марки озброєння На малюнку Фіг 5 наведений приклад руху ЦІЛІ ВЗДОВЖ горизонтального напрямку Х1 у просторі цілей У цьому випадку, незважаючи на те, що рух ЦІЛІ ЗДІЙСНЮ ЄТЬСЯ вздовж горизонтального напрямку, кожен з датчиків кутових швидкостей 5-Х ТА 5-У виробляє ВІДМІННИЙ від нульового значення сигнал, пропорційний до складових кутової швидкості сох, coy вздовж координат X та У носія 3 урахуванням кута нахилу cpz, обчислювач обчислює сумарну кутову швидкість соХ1, обчислює кут напрямку руху ЦІЛІ Ф 21 48905 = arcsm(cox / coX1) = cpz, ідентифікує рух ЦІЛІ, ЯК горизонтальний у напрямку (pz та корегує просторове положення прицільної марки в горизонтальному напрямку в просторі цілей, або теж саме під кутом (pz у системі координат телевізійного монітору Кінцеве положення прицільної марки відповідає положенню 33-1 (див Фіг 5) і має кутове положення ац = аО + рі_ х sin(cpz) + А(соХ1) sin(cpz), Рц = = рО + рі_ х cos(cpz) + А (соХ1) х cos(cpz) в системі координат телевізійного монітору, де А(соХ1) додаток до кутового положення прицільної марки в горизонтальній системі координат розташування ЦІЛІ ПІСЛЯ переміщення прицільної марки у врахованими кутами нахилу носія та кутами орієнтації системи озброєння за допомогою обчислювача 11, оператор сполучає зображення ЦІЛІ З вирахуваним положенням прицільної марки, що займає, наприклад положення 33-1 та вмикає допомогою вузла 17 сигнал стрільби, який з виходу вузла 17 (див Фіг 2) надходить до керуючого входу гармати Кг і за яким здійснюється вмикання електричного спуска гармати, чи іншого озброєння носія Введення датчиків кутів нахилу носія та кутів орієнтації системи озброєння згідно з другим пунктом формули винаходу сприяє також підвищенню точності наведення системи озброєння на ЦІЛІ, ЩО розташовані під ненульовим кутом підвищення У цьому випадку (див Фіг 6) наведення системи озброєння на ціль з ненульовим кутом підвищення досягається шляхом збільшення кута підйому осі системи озброєння в вертикальному напрямку до досягнення віссю 37-2 кутового положення рі_2 У цьому випадку траєкторія руху 38-2 снаряду змінюється і перетинає ціль на заданій дистанції Значення кутів підйому системи озброєння знаходяться в вузлі пам'яті обчислювача 11 і залежать від дистанції L до ЦІЛІ та кута уц1 підвищення ЦІЛІ Збільшення кута підйому осі системи озброєння до певної міри, еквівалентно наведенню системи озброєння на ціль, що розташована на дистанції L2, значення якої перебільшує виміряне за допомогою далекоміра значення дистанції L1 до ЦІЛІ Врахування кута уц1 підвищення ЦІЛІ ЗДІЙСНЮЄТЬСЯ обчислювачем 11 в результаті обчислення кутового положення носія, дистанції до ЦІЛІ та орієнтації осі системи озброєння під час вимірювання дистанції далекоміром Корекція кутового положення прицільної марки обраного типу озброєння здійснюється при цьому шляхом збільшення кута зсуву прицільної марки на величину рі_2 до зайняття маркою положення 32-2 (див Фіг 5) Таким чином, додаткове урахування кутів нахилу носія та кутів орієнтації системи озброєння дозволяє більш точно скорегувати положення прицільної марки на екрані телевізійного монітору і забезпечити підвищення точності наведення системи озброєння на ціль Робота пристрою, що виконаний згідно з третім пунктом формули винаходу аналогічна до роботи пристрою, що виконаний згідно з першим та другим пунктами формули винаходу і яка наведена вище ВІДМІННІСТЬ складає лиш додаткове урахування до положення прицільної марки обраного типу озброєння на екрані телевізійного монітору додатків, що пов'язані з впливом метеорологічних 22 факторів Для урахування метеорологічних факторів сигнали (див Фіг 2) з виходу датчика 24 метеорологічних параметрів надходять до третього входу вузла 21 прийому сигналів датчиків носія, де нормалізуються і звідки зчитуються обчислювачем 11, шостий вхід якого підключений до виходу вузла 21 Обчислювач 11 вираховує додатки до кутового положення осі обраного типу озброєння і аналогічно до описаного вище процесу переміщає прицільну марку обраного типу озброєння вздовж двох координат розгортки телевізійного монітору ВІДПОВІДНО до значень метеорологічних факторів Наприклад, при відсутності вітру система озброєння носія 36 забезпечувала влучення в ціль 34, що розташована на дистанції L1 при куті підйому осі системи озброєння рі Траєкторія руху снаряду показана на Фіг 7 позицією 40-1 За умови наявності вітру, що має швидкість Vz вздовж осі руху снаряду траєкторія снарядів змінються і займає позицію 40-2, що не перетинає ціль Для корекції траєкторії кут підйому гармати потрібно змінити до зайняття гарматою положення 39-2, що має менший кут підйому рі Визначення кута підйому робиться обчислювачем, який приймає дані з виходу датчика метеорологічних параметрів і вираховує потрібний кут переміщення прицільної марки на екрані телевізійного монітору Переміщення марки призводить до необхідності корекції оператором кутового положення осі системи прицілювання до спів падіння скорегованого положення марки з зображенням ЦІЛІ У цьому випадку гармата має, наприклад, кут підйому р2, що забезпечує корекцію 40-3 траєкторії снаряду і влучення снаряду у ціль 34 Аналогічно до врахування напрямку і швидкості повітря, обчислювачем також враховуються додатки до кутового положення прицільної марки, пов'язані з ЩІЛЬНІСТЮ, температурою, тиском та вологістю повітря Додаткове урахування у системі метеорологічних факторів згідно з третім пунктом формули винаходу дозволяє більш точно скорегувати положення прицільної марки на екрані телевізійного монітору і забезпечити підвищення точності наведення системи озброєння на ціль Робота пристрою, що виконаний згідно з четвертим пунктом формули винаходу аналогічна до роботи пристрою, що виконаний згідно з першим, другим та третім пунктами формули винаходу і яка наведена вище ВІДМІННІСТЬ складає лиш додаткове урахування до положення прицільної марки обраного типу озброєння на екрані телевізійного монітору додатків, що пов'язані з рухом носія відносно ЦІЛІ Для урахування руху носія на положення прицільної марки озброєння сигнали (див Фіг 2) з виходу датчика 25 швидкості і напрямку руху носія надходять до сьомого входу обчислювача 11 Обчислювач 11 вираховує додатки до кутового положення осі обраного типу озброєння і аналогічно до описаного вище процесу переміщає прицільну марку обраного типу озброєння вздовж двох координат розгортки Процес корекції кутового положення прицільної марки ілюстрований на Фіг 8 для випадку взаємного зустрічного руху ЦІЛІ І НОСІЯ, ВІДПОВІДНО з швидкостями VL| та VH Почат кова дистанція, що виміряна за допомогою далекоміра складає L1, при цьому траєкторія руху сна 23 48905 ряду 40 перетинає ціль 34 у разі підйому осі системи озброєння на кут рі_1 (див Фіг 8) Значення кута рі_1 відповідає куту балістичного зниження обраного типу озброєння і зчитується, як і у попередніх випадках, обчислювачем 11 з вузла пам'яті ВП У разі руху носія (а також і ЦІЛІ), ПІСЛЯ проведення вимірювання дистанції L1 до ЦІЛІ І наведення осі системи озброєння на вирахуване положення, що задається прицільною маркою минає певний проміжок часу 5t, на протязі якого ціль і носій займають нові положення, ВІДПОВІДНО 34-1 та 36-1 Дистанція І_2 між ціллю і носієм вираховується обчислювачем 11 з урахуванням напрямку і швидкості руху носія та швидкості і напрямку руху ЦІЛІ Інформація щодо напрямку і швидкості руху носія зчитується обчислювачем 11 з виходу датчика 25, вихід якого підключений до сьомого входу обчислювача 11 Інформація щодо напрямку і швидкості руху ЦІЛІ вираховується обчислювачем 11 під час вимірювання дистанції до ЦІЛІ на підставі обробки результатів послідовних вимірювань дистанції з урахуванням кутів рос положення ЦІЛІ ВІДНОСНО осі системи озброєння, кутів нахилу носія та кутової швидкості ЦІЛІ, у ВІДПОВІДНІСТЬ ДО ТОГО, як це було описано для системи, що виконана згідно з першим пунктом формули винаходу У випадку зближення носія і ЦІЛІ з швидкостями V H та \/ц поточне значення дистанції складає L2 = L1 - ( V H + \/ц) 5t У ВІДПОВІДНОСТІ до урахованого поточного значення дистанції L2 обчислювач 11 змінює просторове положення прицільної марки на екрані телевізійного монітору, внаслідок чого для суміщення прицільної марки з зображенням ЦІЛІ оператор змушений змінити кутове положення осі 39-1 системи озброєння, зменшивши кут підйому системи озброєння до рі_2 Скореговане значення кута підйому осі системи озброєння забезпечує перетинання траєкторією 40-1 руху снаряду ЦІЛІ 34 і відповідає розрахованому положення носія і ЦІЛІ Додаткове урахування у системі керування вогнем руху носія відносно розрахованого положення ЦІЛІ згідно з четвертим пунктом формули винаходу дозволяє більш точно скорегувати положення прицільної марки на екрані телевізійного монітору і підвищити точність наведення системи озброєння на ціль Робота пристрою, що виконаний згідно з п'ятим пунктом формули винаходу аналогічна до роботи пристрою, що виконаний згідно з першим, другим, третім та четвертим пунктами формули винаходу і яка наведена вище ВІДМІННІСТЬ складає лиш введення режиму автоматичного наведення осі озброєння або далекоміра, що підвищує точність наведення системи керування вогнем і зменшує навантаження на оператора Для введення режиму автоматичного наведення до складу пристрою введені (див Фіг 3) вузол 26 реєстрації відеосигналів, вузол 27 установки та перемикання зон захвату та вузол 28 формування сигналів корекції До складу вузла 27 входять, наприклад, перемикач зон захвату видеосигналу та органи керування для встановлення просторових меж кожної із зон захвату 3 метою спрощення малюнку зазначені органи керування на малюнку не наведені Під час роботи пристрою оператор сполучає прицільну марку ЗО далекоміра 24 (див Фіг 9) на зображення ЦІЛІ 29 і вмикає далекомір Одночасно з вимірюванням дистанції до ЦІЛІ, відеосигнал, що містить зображення ЦІЛІ 29 надходить до входу вузла 26 з першого входу суматора 16 де реєструється вузлом 26 в зоні супроводження 4 1 , що обмежена встановленою обчислювачем 11 частиною повного зображення кадру навколо положення прицільної марки далекоміра Зареєстроване зображення ЦІЛІ ВВОДИТЬСЯ вузлом 26 до обчислювача 11 через вхід 1-1 Розміри зони 41 та її положення відносно центру прицільної марки ЗО далекоміра встановлюються за допомогою органів керування (на малюнку не показані) вузла 27, що підключений до 2-1 входу обчислювача 11 Після вимірювання дистанції до ЦІЛІ поточне зображення ЦІЛІ 29 реєструється вузлом 26 та вводиться у обчислювач 11 У разі відхилення ЦІЛІ від центра прицільної марки, наприклад у разі розташування ЦІЛІ у положенні 29-Д, обчислювач 11 вираховує значення координат а ц 1 , Рц1 поточного положення ЦІЛІ та визначає значення кута неузгодженості ЦІЛІ 5а = ац1 - ад, 5р = Рц1 Рд вздовж двох координат відносно положення ад, Рд центра прицільної марки далекоміра з урахуванням кута поля зору приладу спостереження, який вибрано за допомогою перемикача 14 та видає отримані значення кутів неузгодження 5а, 5р на вхід вузла формування сигналів корекції 28 Вузол 28 формує сигнали корекції по двом координатам наведення Х т а У, що надходять до третіх входів ХЗ та УЗ суматора 8 Під дією сформованих сигналів ось прицільного блоку 1 стабілізується у напрямку на ціль таким чином, що ось далекоміра перетинає ціль, що зумовлює можливість проведення повторних замірів дистанції до ЦІЛІ у автоматичному режимі Після вибору за допомогою перемикача 13 типу озброєння та переключення зон супроводження за допомогою органів керування (не показані) вузла 27 , обчислювач 11 вираховує значення просторового зсуву поточного положення ЦІЛІ 29 відносно положення прицільної марки 42 обраного типу озброєння, визначає значення кутів неузгодженості 5а = ац2 - ац, 5р = Рц2 - рц ЦІЛІ відносно центра ац, рц прицільної марки озброєння з урахуванням кута поля зору приладу спостереження, який вибрано за допомогою перемикача 14 та видає отримані значення на вхід вузла формування сигналів корекції 28 Вузол 28 формує сигнали корекції по двом координатам наведення X та У, що надходять до третіх входів ХЗ та УЗ суматора 8 Під дією сформованих сигналів, ось системи озброєння орієнтується у напрямку на прицільну марку, при цьому зображення ЦІЛІ 29-2 автоматично сполучається з центром прицільної марки 42 озброєння і займає положення 29-1, що забезпечує перетинання траєкторією снаряду ЦІЛІ і підвищує точність наведення системи озброєння на ціль у випадках руху ЦІЛІ та носія Алгоритми обробки сигналів зображення обчислювачем 1 1 , а також процес поновлення еталонного зображення ЦІЛІ не є предметом винаходу У разі зміни обраного типу озброєння обчислювач 11 формує іншу прицільну марку, визначає кут неузгодженості поточного положення ЦІЛІ відносно координат прицільної марки, формує сигнали керування віссю прицільного блоку і системи озбро 25 26 просторового положення носія та ЦІЛІ, врахуванні балістичних характеристик обраного типу озброєння, значення бази, кута поля зору обраного приладу спостереження та метеорологічних факторів, що змінюються під час роботи системи Використані джерела інформації 1 Патент Роси , № 2133432 МКВ F41G 5/14 публ 07 07 98р 2 Патент Роси № 2138757 МКВ F41G 5/14 публ 27 09 99р 3 Заявка Японії № 63-95143, МКВ F41G 3/00 публ 18 04 88р 4 Заявка Японії № 63-260753 МКВ F41G3/22 публ 17 10 88 р - прототип 5 Заявка Японії № 59-18670 МКВ G01S 3/78, H04N 5/26, 7/18 від 28 04 84р 6 Заявка ЕПВ № 0418062 МКВ F41G 3/06 публ 20 03 91 р 7 "Оптико-телевизионная система прицеливания и управления вооружением модернизированной БМП-1", авторів Е Н Глущенко, Л И Демченко, ЛИ Лисица, ВИ Мартинюк, "Артиллерийское и стрелковое вооружение", № 3 , 2001 г, стр 59 - 62 8 Патент України № 32632 "Система керування вогнем танка", МКВ F41G 5/24 авторів Руденко М П , Фролов Л А , БусякЮ М публ 15 02 2001 р 9 Заявка Великобританії № 1470753 МКВ G01S 3/78 публ 22 02 1977 р 10 Патент США № 4922801 МКВ F41 G 3/08 публ 01 08 1989р 48905 єння з урахуванням обраного типу озброєння У випадку повторного вимірювання дистанції до ЦІЛІ оператор за допомогою органів керування вузла 27 формує команду перемикання зони супроводження, при цьому обчислювач 11 повертається до режиму вимірювання поточних координат ЦІЛІ ВІДНОСНО положення прицільної марки далекоміра і стабілізує кутове положення осі далекоміра у напрямку на ціль Введення режиму автоматичного визначення поточних координат ЦІЛІ ВІДНОСНО положення прицільних марок далекоміра та обраного типу озброєння з одночасною стабілізацією кутового положення осі системи озброєння у двох перемикаємих оператором напрямках дозволяє спростити роботу оператора, підвищити точність наведення та скоротити час наведення Обчислювач системи може бути виконаний на базі мікроконтролера ADUC 812 Конструкція вузлів вводу - виводу інформації відповідає вимогам стандартної схемотехніки обчислювальних засобів У прицілі використані стандартні телевізійні камери, телевізійний монітор та стандартні вузли формування телевізійного сигналу, наприклад типу М5М5408ВТР-70Н1 Система керування вогнем, що заявляється, дозволяє підвищити точність наведення осі далекоміру та осі системи озброєння на ціль прицілу, а також значно скоротити час, потрібний оператору для вимірювання дистанції та наведення системи на ціль у тому числі під час руху ЦІЛІ та носія, ЗМІНІ 27 48905 28 ПРИЦІЛЬНИЙ БЛОК ГІРШІ. СПОСТЕР. О І B U S Комутатор ПРИЛ. СПОСТЕР. Квх ДАЛЕКОМІР О,. 5-Х ДКШк СТВОЛ ГАРМАТИ 5-У ДКШу Привід X Блок керування приводом Перемикач ІЗ типу озброєння До системи озброєння ітНя ФІГ.Ї 29 48905 Датчик 24 метеоролог. параметрів. Г ЗО ПРИЦІЛЬНИЙ БЛОК ПРИЛ. СПОСТЕР. І вих h Комутатор ПРИ Л СПОСТЕР. ДАЛЕКОМІР І О,__ і 5-Х ДКШх •• СТВОЛ ГАРМАТИ Датчик 23 кутів оріент. енст. озбр. Датчик 22 кутів нахилу носія t кг Y f 5-У ДКШу : Привід Блок керування приводом Датчик 25 ШБНДК. та вапр руху 12 ПНК і ! Перемикач ІЗ типу озброєння Перемикач 14 приладів спостереження І До системи озброєння 1 21 2 ВПСД З Фіг 2 48905 31 Датчик 25 метеоролог. параметрів. г 32 ПРИЦІЛЬНИЙ БЛОК І вик ПРШІ. СПОСТЕР. ПРИЛ. СПОСТЄР. Комутатор і *п ДАЛЕКОМІР 5-Х ДІСШх О и - - | — - — і » , стват ГАРМАТИ Датчик 23 кутів орієнт сист. озбр. Jke^-—!"^ 5-У ДКШу Привід Датчик 22 КУТІВ НЯХВЛу иоеія Блок керування приводом Вузол форм. 28 сиги, корекції Вузол уст. та перем. 27 зон захвату Перемикач 13 типу озброєння Вузол реєстрації 26 видеосигнал їв Перемикач 14 приладів спостереження До системи озброєння Фіг.З 48905 33 34 ад аО ССЦ Фіг.4 аО ац ац! Фіг.5 38-1 ФІГ 6 38-2 35 48905 36 403 Vz 40-2 39-1 Фіг.7 40-1 40 39-1 34 Фіг.8 ссц2 ац ад а ц ! 2 30 9 Рд 0ц ,29-2 ФІГ.9 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for fire control
Автори англійськоюHuz Volodymyr Ivanovych, Medvid Volodymyr Stanislavovych, Pironer Yan Mykhailovych, Bohomol Volodymyr Ivanovych, Protasov Volodymyr Heorhiiovych, Yanovskyi Yurii Vasyliovych
Назва патенту російськоюСистема управления огнем
Автори російськоюГузь Владимир Иванович, Медвидь Владимир Станиславович, Пиронер Ян Михайлович, Богомол Владимир Иванович, Протасов Владимир Георгиевич, Яновский Юрий Васильевич
МПК / Мітки
МПК: F41G 3/06, F41G 3/00, G02B 23/00
Мітки: вогнем, система, керування
Код посилання
<a href="https://ua.patents.su/18-48905-sistema-keruvannya-vognem.html" target="_blank" rel="follow" title="База патентів України">Система керування вогнем</a>
Система керування вогнем танка
Номер патенту: 45502
Опубліковано: 15.04.2002
Автори: Руденко Микола Прохорович, Бусяк Юрій Митрофанович, Бондаренко Олександр Григорович, Походняков Валерій Георгійович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: танка, керування, система, вогнем
Формула / Реферат:
Система керування вогнем танка, що містить блок керування приводами, балістичний обчислювач, блок індикації, механізм заряджання, нічний приціл, денний приціл, що складається з датчика кута вертикального наведення, кінематично зв'язаного з гіростабілізатором, пульта керування, перший вихід якого з'єднаний з першим входом гіростабілізатора, пристрою введення типу балістик, пристрою введення дальності, з'єднаного з першим входом балістичного...
Система керування вогнем танка
Номер патенту: 51830
Опубліковано: 16.12.2002
Автори: Мошнін Віктор Миколайович, Бондаренко Олександр Григорович, Хандога Анатолій Максимович, Єрдаков Євген Володимирович
МПК: F41G 5/00
Мітки: керування, система, вогнем, танка
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, приціл, який складається з пульта керування, з'єднаного з приводом дзеркала прицілу, датчика кута вертикального наведення, датчика кута горизонтального наведення, які кінематично зв'язані з дзеркалом прицілу і відповідно з гарматою і баштою, балістичний обчислювач, блок керування приводами, гіротахометр вертикального наведення і гіротахометр горизонтального наведення,...
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Бусяк Юрій Митрофанович, Фролов Леонід Андрійович, Руденко Микола Прохорович
МПК: F41G 5/00
Мітки: вогнем, танка, керування, система
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Фролов Леонід Андрійович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: система, керування, вогнем, танка
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Система керування вогнем танка
Номер патенту: 54601
Опубліковано: 17.03.2003
Автори: Ганзера Юрій Іванович, Мошнін Віктор Миколайович, Єрдаков Євген Володимирович, Хандога Анатолій Максимович, Касьянов Валерій Іванович, Бондаренко Олександр Григорович, Вакуленко Володимир Вікторович
МПК: F41G 5/00
Мітки: вогнем, танка, керування, система
Формула / Реферат:
1. Система керування вогнем танка, яка містить приціл, привід гармати, привід башти, що складається з механізму повороту башти, виконаного з кінематично зв'язаних один з одним електромагніта механізму повороту башти, редуктора, виконавчого двигуна, вентилятора і ручного приводу, кінематично зв'язаного з редуктором електромашинного підсилювача, перший вихід якого з'єднаний з виконавчим двигуном, комутатора електромашинного підсилювача,...
Попередній патент: Жорстка сигаретна пачка з шарнірною кришкою
Наступний патент: Феніл- і піридилтетрагідропіридини, що інгібують фактор некрозу пухлин, спосіб їх одержання та фармацевтична композиція
Випадковий патент: Ємність для кулера