Фрикційно-еластомерний поглинаючий апарат
Номер патенту: 109267
Опубліковано: 10.08.2015
Автори: Джуресік Кріс К., Уілт Дональд І., О'Доннелл Уільям П., Сейліс Кіт А., Галіндо Розі, Покорскі Роберт Дж.
Формула / Реферат
1. Фрикційно-еластомерний поглинаючий апарат, який включає:
порожнистий металевий корпус, відкритий на першому кінці й закритий на його другому кінці, причому корпус визначає подовжню вісь для поглинаючого апарата і має ряд витягнутих в подовжньому напрямку внутрішніх поверхонь, що звужуються, де поверхні відкриті до першого кінця корпусу і простягаються від нього, причому корпус має дві пари з'єднаних і в цілому паралельних стінок, які простягаються від закритого другого кінця до першого кінця, утворюючи порожнисту камеру в цілому прямокутної форми у поперечному перерізі на більшій частині її довжини, та відкриту на відкритому кінці корпусу;
ряд фрикційних елементів, розташованих на першому кінці корпусу на однаковій відстані один від одного навколо подовжньої осі корпусу, причому кожен фрикційний елемент має аксіально рознесені перший та другий кінці, а також зовнішню поверхню, розташовану між цими кінцями, при цьому зовнішня поверхня кожного фрикційного елемента знаходиться у функціональному поєднанні з однією з витягнутих в подовжньому напрямку внутрішніх поверхонь, що звужуються, корпусу, з утворенням між ними першої похилої поверхні фрикційного ковзання;
клиноподібний елемент, виконаний з можливістю осьового переміщення відносно першого кінця корпусу та з можливістю прикладання до нього зовнішньої сили, причому клиноподібний елемент має ряд зовнішніх поверхонь, що звужуються, розташованих на однаковій відстані одна від іншої навколо подовжньої осі корпусу, причому їх кількість дорівнює кількості фрикційних елементів, при цьому кожна зовнішня поверхня, що звужується, на клиноподібному елементі знаходиться у функціональному поєднанні з внутрішньою поверхнею кожного фрикційного елемента, з утворенням між ними другої похилої поверхні фрикційного ковзання, так щоб в результаті переміщення клиновидного елемента всередину корпусу фрикційний елемент переміщався радіально назовні;
пружинний упор, розташований у порожнистій камері, одна з поверхонь якого знаходиться у функціональному зачепленні з другим кінцем кожного фрикційного елемента, при цьому кожен фрикційний елемент додатково містить конструктивний елемент, виконаний у функціональному поєднанні з пружинним упором, для підтримання правильного положення кожного фрикційного елемента відносно клиноподібного елемента під час роботи поглинаючого апарата;
комплект пружин, розташований у порожнистій камері між закритим кінцем корпусу та другою поверхнею пружинного упора, для поглинання, розсіювання та повернення енергії, що передається поглинаючому апарату, причому комплект пружин включає укладені вздовж осі у вигляді пакета окремі еластомерні пружини, кожна з яких включає еластомерну подушку, що в цілому має прямокутну форму, яка наближена до форми поперечного перерізу порожнистої камери корпусу, для оптимізації поглинаючої та відбиваючої здатності комплекту пружин під час роботи поглинаючого апарата, при цьому принаймні одна стінка корпусу має отвір, крізь який в порожнисту камеру можуть бути встановлені еластомерні пружини;
вказаний комплект пружин сконфігурований для функціонування в поєднанні з розташуванням першої та другої похилих поверхонь ковзання відносно подовжньої осі поглинаючого апарата таким чином, що вказаний поглинаючий апарат стабільно й багаторазово витримує 100 кДж енергії, що передається поглинаючому апарату, в той час як рівень сили становить приблизно два меганьютони у межах переміщення клиноподібного елемента в аксіальному напрямку всередину корпусу на понад приблизно 90 мм.
2. Фрикційно-еластомерний поглинаючий апарат за п. 1, який відрізняється тим, що перша похила поверхня фрикційного ковзання розташована під кутом в інтервалі від приблизно 1,7° до приблизно 2° відносно подовжньої осі поглинаючого апарата.
3. Фрикційно-еластомерний поглинаючий апарат за п. 1, який відрізняється тим, що друга похила поверхня фрикційного ковзання розташована під кутом в інтервалі від приблизно 32° до приблизно 45° відносно подовжньої осі поглинаючого апарата.
4. Фрикційно-еластомерний поглинаючий апарат за п. 1, який відрізняється тим, що еластомерна подушка кожної окремої еластомерної пружини виконана з поліестерного матеріалу, який має твердість D за Шором в інтервалі приблизно від 40 до 60, і співвідношення пружної деформації до пластичної деформації більше ніж 1,5 до 1.
5. Фрикційно-еластомерний поглинаючий апарат за п. 4, який відрізняється тим, що кожна еластомерна подушка кожної окремої еластомерної пружини додатково включає металеві пластини на протилежних плоских сторонах еластомерної подушки.
6. Фрикційно-еластомерний поглинаючий апарат за п. 5, який відрізняється тим, що кожна металева пластина включає конструктивний елемент, який взаємозачеплюється з подібним конструктивним елементом суміжної еластомерної пружини для підтримання окремих еластомерних пружин в цілому вирівняними одна відносно іншої та укладеними одна на одну.
7. Фрикційно-еластомерний поглинаючий апарат для залізничного вагона, який включає:
видовжений уздовж осі металевий корпус, який має закритий кінець, відкритий кінець та подовжню вісь, яка простягається між цими кінцями, а також дві пари з'єднаних бокових стінок, які простягаються загалом від закритого кінця на всю поздовжню відстань між вказаними кінцями з утворенням порожнистої камери, яка має в цілому прямокутну форму у поперечному перерізі;
комплект фрикційного вузла для поглинання аксіальних ударних навантажень, спрямованих на один кінець поглинаючого апарата, де комплект фрикційного вузла включає ряд фрикційних елементів, кожен з яких має зовнішню поверхню, розташовану під кутом до подовжньої осі та яка знаходиться в ковзній фрикційній взаємодії з відкритим кінцем корпусу з утворенням першої похилої поверхні фрикційного ковзання, розташованої під кутом θ до подовжньої осі поглинаючого апарата, причому комплект фрикційного вузла додатково включає привідний механізм, який має ряд похилих поверхонь, один кінець якого аксіально виступає за межі відкритого кінця корпусу, щоб приймати аксіально спрямовану на поглинаючий апарат енергію, а кожна похила поверхня привідного механізму знаходиться у фрикційному ковзному зачепленні з внутрішньою поверхнею відповідного фрикційного елемента з утворенням другої похилої поверхні фрикційного ковзання, розташованої під кутом b до подовжньої осі поглинаючого апарата, а також пружинний упор, встановлений у функціональному поєднанні з рядом фрикційних елементів, при цьому кожен фрикційний елемент комплекту фрикційного вузла додатково містить конструктивний елемент, що знаходиться у функціональному поєднанні з пружинним упором для підтримання правильного положення кожного фрикційного елемента відносно клиноподібного елемента під час роботи поглинаючого апарата;
комплект еластомерних пружин, встановлених по центру та з можливістю ковзання всередині прямокутної порожнистої камери корпусу, і який складається з ряду укладених один на одний вздовж осі окремих елементів, розташованих між закритим кінцем корпусу та пружинним упором для поглинання, розсіювання та повернення енергії, що передається привідному механізму під час роботи поглинаючого апарата, при цьому кожний елемент включає еластомерну пружину, що має в цілому прямокутну в плані форму, і яка відповідає внутрішній частині порожнистої камери, визначеної металевим корпусом, при цьому принаймні одна бокова стінка корпусу має отвір, крізь який в порожнисту камеру корпусу можуть бути встановлені еластомерні пружини;
вказаний комплект пружин сконфігурований для функціонування в поєднанні з похилим розташуванням першої та другої поверхонь ковзання відносно подовжньої осі поглинаючого апарата таким чином, що вказаний поглинаючий апарат стабільно й багаторазово витримує приблизно 130 кДж енергії, що передається поглинаючому апарату, при рівні сили приблизно три меганьютони у межах переміщення клиноподібного елемента в аксіальному напрямку всередину корпусу на не більше ніж приблизно 120 мм.
8. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що кут q нахилу першої похилої поверхні фрикційного ковзання до подовжньої осі поглинаючого апарата знаходиться в інтервалі між приблизно 1,7° і приблизно 2°.
9. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що кут b нахилу другої похилої поверхні фрикційного ковзання до подовжньої осі поглинаючого апарата знаходиться в інтервалі приблизно між приблизно 32° і приблизно 45°.
10. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що еластомерна пружина кожного окремого елемента комплекту еластомерних пружин виконана з поліестерного матеріалу, який має твердість D за Шором в інтервалі приблизно від 40 до 60, і співвідношення пружної деформації до пластичної деформації більше ніж 1,5 до 1.
11. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що еластомерна пружина кожного окремого елемента зазначеного комплекту еластомерних пружин має металеві пластини, прикріплені до його протилежних плоских сторін, та кожна металева пластина кожного окремого елемента зазначеного комплекту еластомерних пружин включає конструктивний елемент, який взаємозачеплюється з подібним конструктивним елементом суміжного елемента зазначеного комплекту еластомерних пружин для підтримання зазначених окремих елементів в цілому вирівняними один відносно іншого та укладеними один на одний.
12. Фрикційно-еластомерний поглинаючий апарат для залізничного вагона, який включає:
металевий корпус, що має закритий і відкритий кінці, розташовані співвісно подовжній осі, порожнисту камеру, утворену двома парами в цілому паралельних з'єднаних стінок для забезпечення в цілому прямокутної форми поперечного перерізу камери, що простягається від закритого кінця до відкритого кінця, а також множину фрикційних поверхонь, що звужуються, які простягаються від відкритого кінця до закритого кінця корпусу;
ряд розташованих на однаковій відстані один від одного фрикційних елементів, встановлених у відкритому кінці корпусу, при цьому зовнішня похила поверхня кожного фрикційного елемента перебуває у функціональному поєднанні з фрикційною поверхнею корпусу, з утворенням між ними першої похилої поверхні фрикційного ковзання;
клиноподібний елемент, що має вільний кінець, який виступає за межі відкритого кінця корпусу і має множину фрикційних поверхонь, що зачіплюються з внутрішніми похилими поверхнями фрикційних елементів з можливістю активації їх під час руху клиноподібного елемента всередину корпусу, де друга похила фрикційна поверхня ковзання визначається між фрикційними поверхнями на клиноподібному елементі та внутрішніми похилими поверхнями фрикційних елементів;
комплект еластомерних пружин, встановлених по центру та з можливістю ковзання всередині прямокутної порожнистої камери корпусу, і який складається з ряду укладених один на одний вздовж осі окремих елементів, для перешкоджання руху всередину клиноподібного елемента під час роботи поглинаючого апарата, причому один кінець комплекту пружин розміщений напроти закритого кінця корпусу, а другий кінець комплекту пружин притискає пружинний упор, розташований в цілому перпендикулярно подовжній осі поглинаючого апарата, до одного кінця кожного фрикційного елемента, і кожний окремий елемент включає еластомерну пружину, що має в цілому прямокутну в плані форму, і яка відповідає внутрішній частині порожнистої камери, визначеної металевим корпусом, при цьому принаймні одна стінка корпусу має отвір, крізь який в порожнисту камеру корпусу можуть бути встановлені еластомерні пружини, а кожен фрикційний елемент додатково містить конструктивний елемент, встановлений у функціональному поєднанні з пружинним упором для підтримання правильного положення кожного фрикційного елемента відносно клиноподібного елемента під час роботи поглинаючого апарата;
вказаний комплект пружин, сконфігурований для функціонування в поєднанні з розташуванням першої та другої похилих поверхонь фрикційного ковзання відносно подовжньої осі поглинаючого апарата таким чином, що вказаний поглинаючий апарат стабільно й багаторазово витримує від приблизно 100 кДж до приблизно 130 кДж енергії, що передається поглинаючому апарату, в той час, як рівень сили не перевищує три меганьютони та у межах переміщення клиноподібного елемента в аксіальному напрямку всередину корпусу в інтервалі від приблизно 90 мм до приблизно 120 мм.
13. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що перша похила поверхня фрикційного ковзання розташована під кутом до подовжньої осі поглинаючого апарата в інтервалі від приблизно 1,7° до приблизно 2°.
14. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що друга похила поверхня фрикційного ковзання розташована під кутом до подовжньої осі поглинаючого апарата в інтервалі від приблизно 32° до приблизно 45°.
15. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що еластомерна пружина кожного окремого елемента комплекту пружин виконана з поліестерного матеріалу, який має твердість D за Шором в інтервалі приблизно від 40 до 60, і співвідношення пружної деформації до пластичної деформації більше ніж 1,5 до 1.
16. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що еластомерна пружина кожного окремого елемента зазначеного комплекту еластомерних пружин має металеві пластини, прикріплені до його протилежних плоских сторін, та кожна металева пластина кожного окремого елемента зазначеного комплекту еластомерних пружин включає конструктивний елемент, який взаємозачеплюється з подібним конструктивним елементом суміжного елемента зазначеного комплекту еластомерних пружин для підтримання зазначених окремих елементів в цілому вирівняними один відносно іншого та укладеними один на одний.
Текст
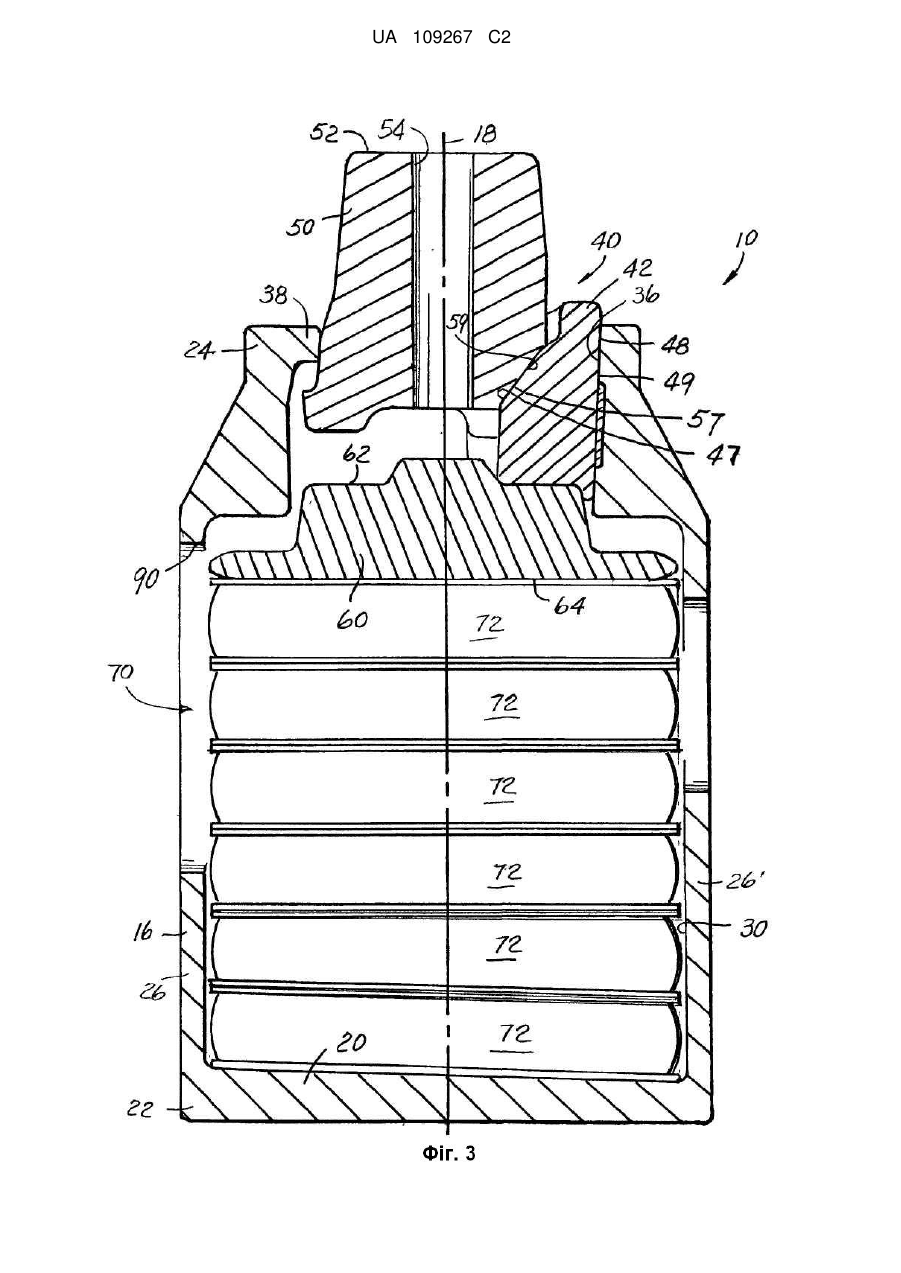
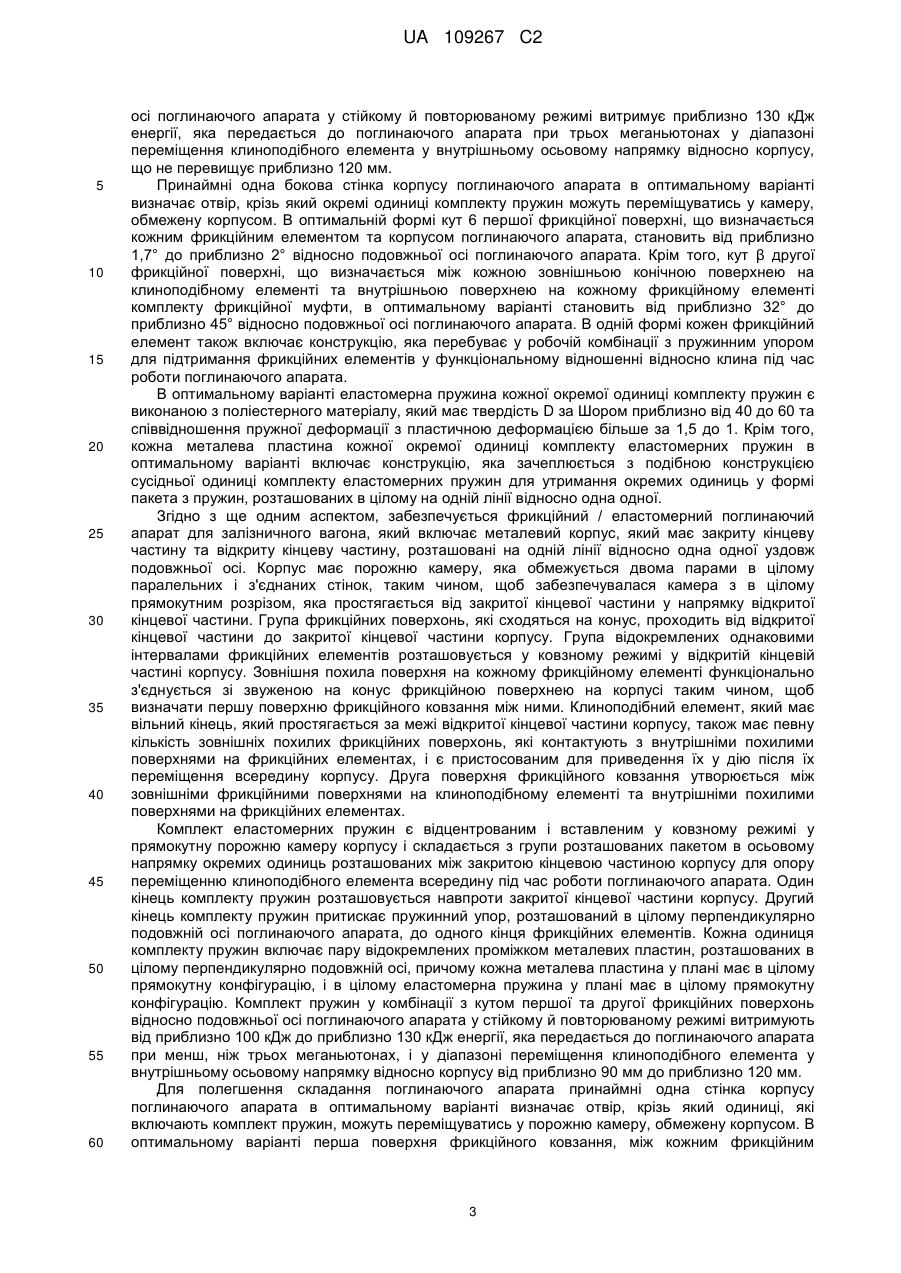
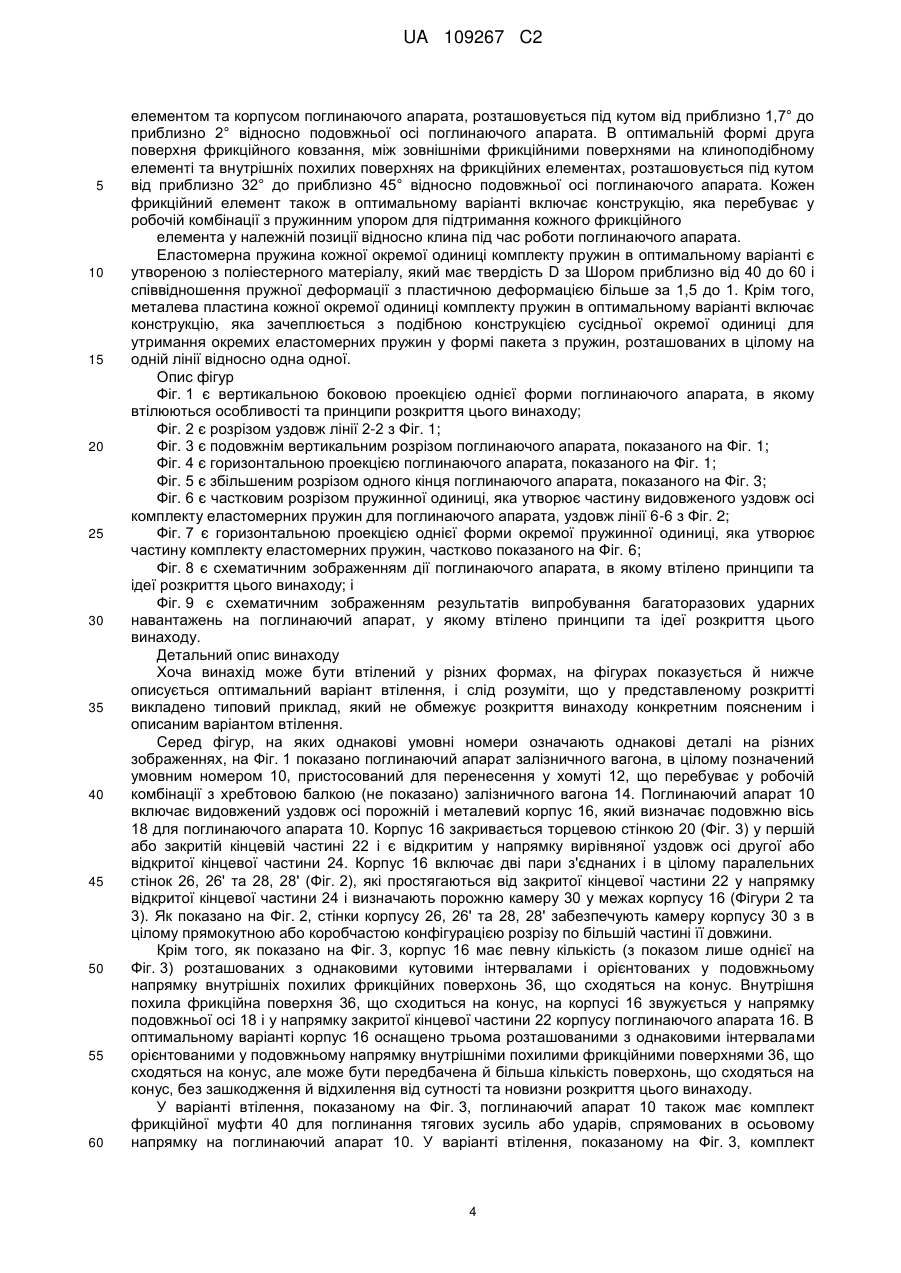
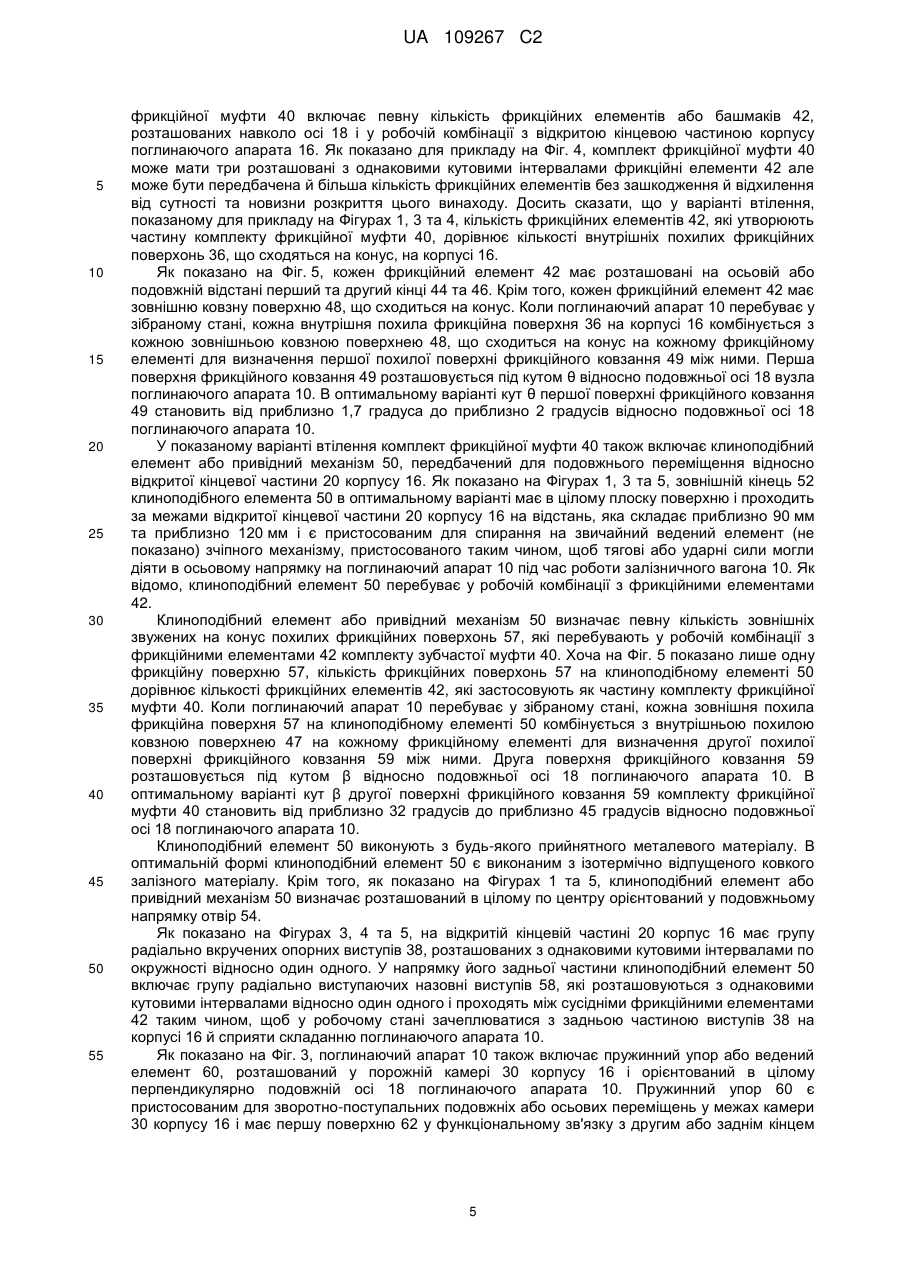
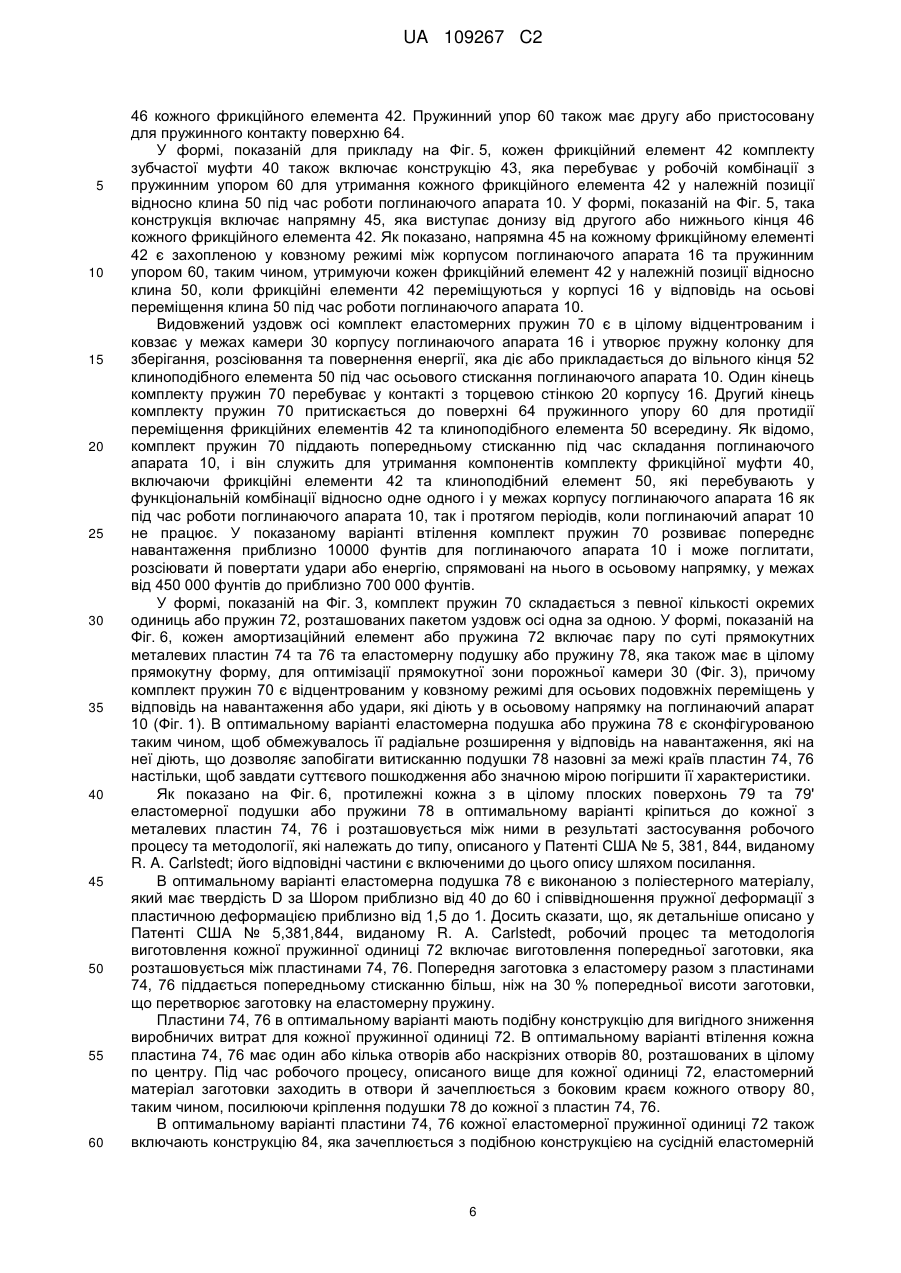
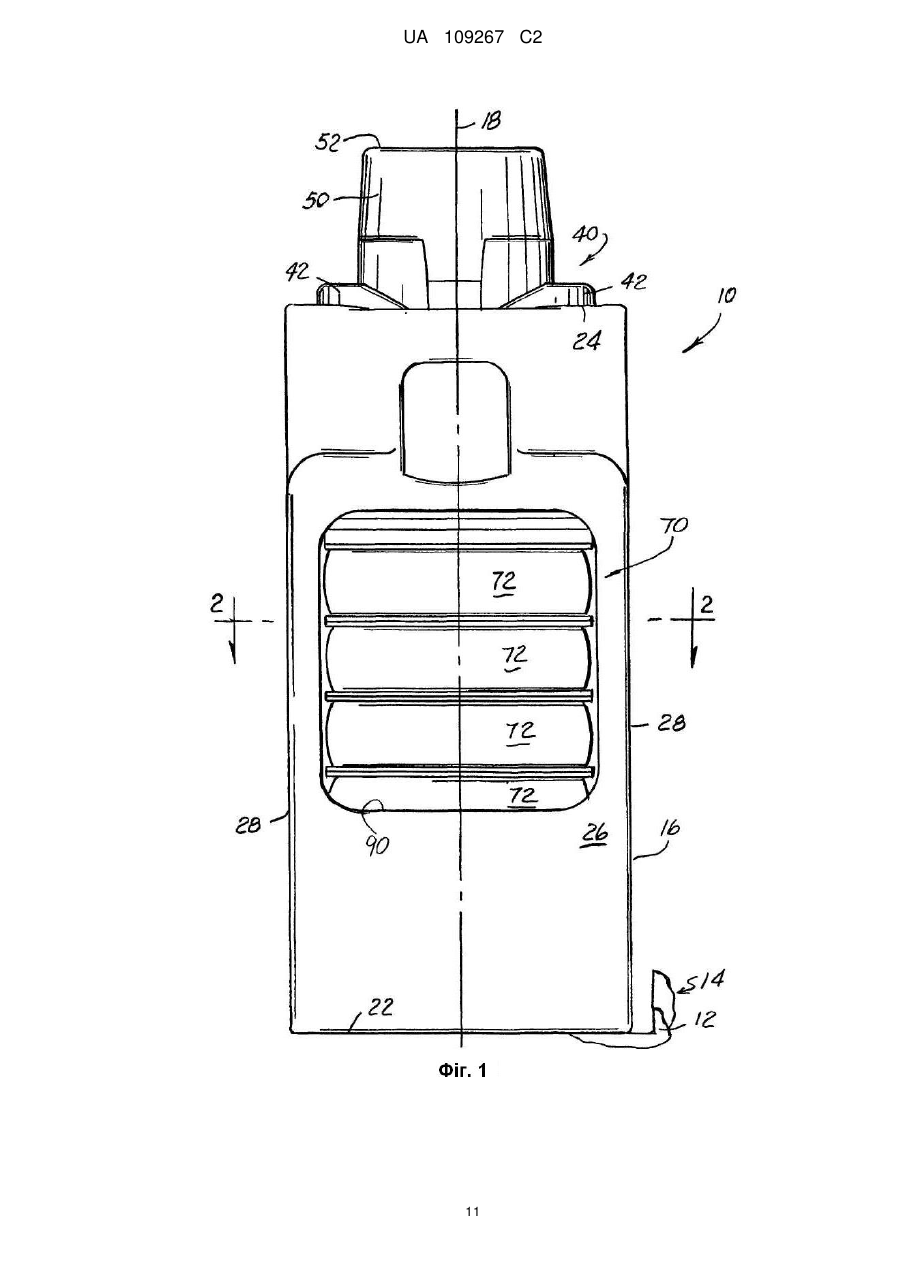
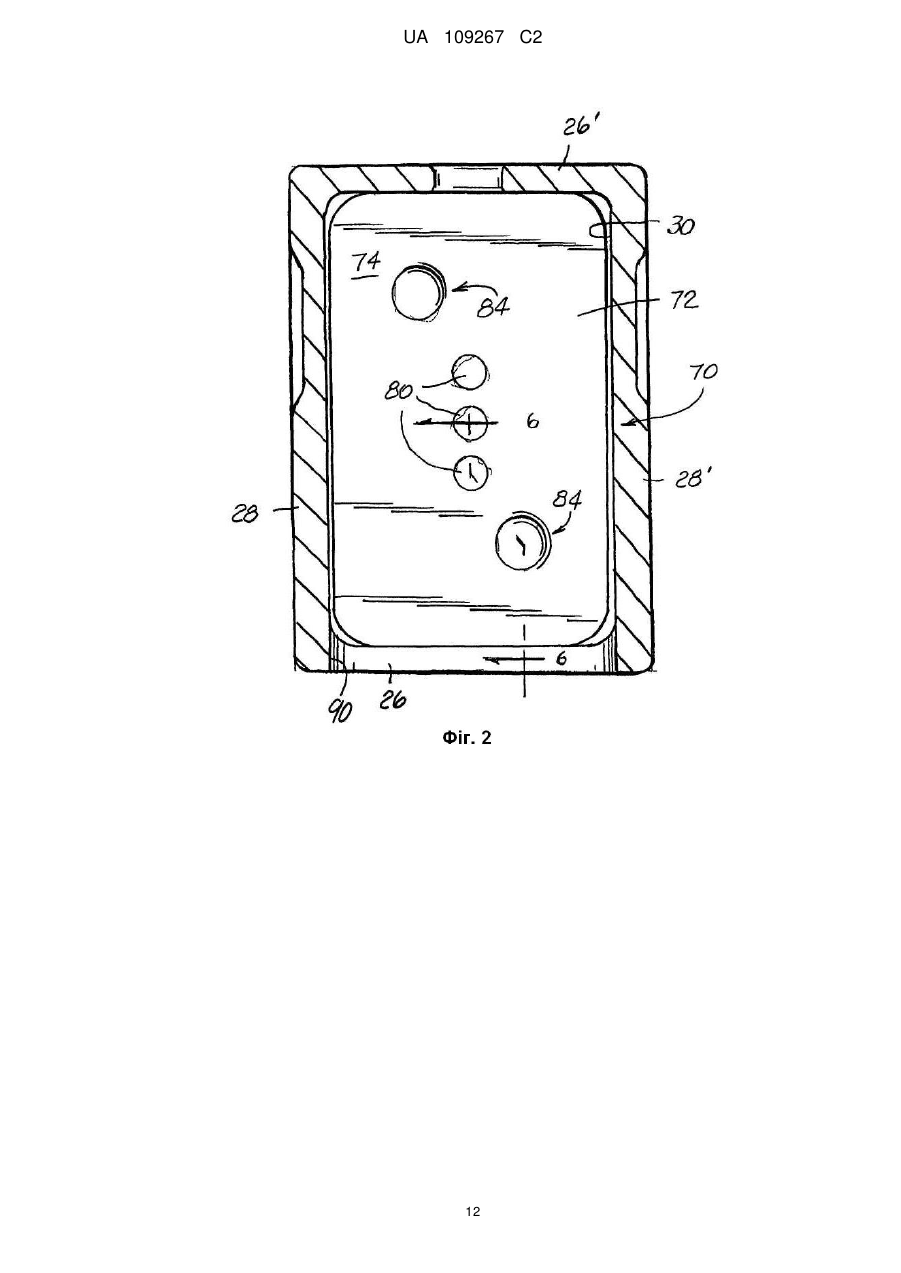
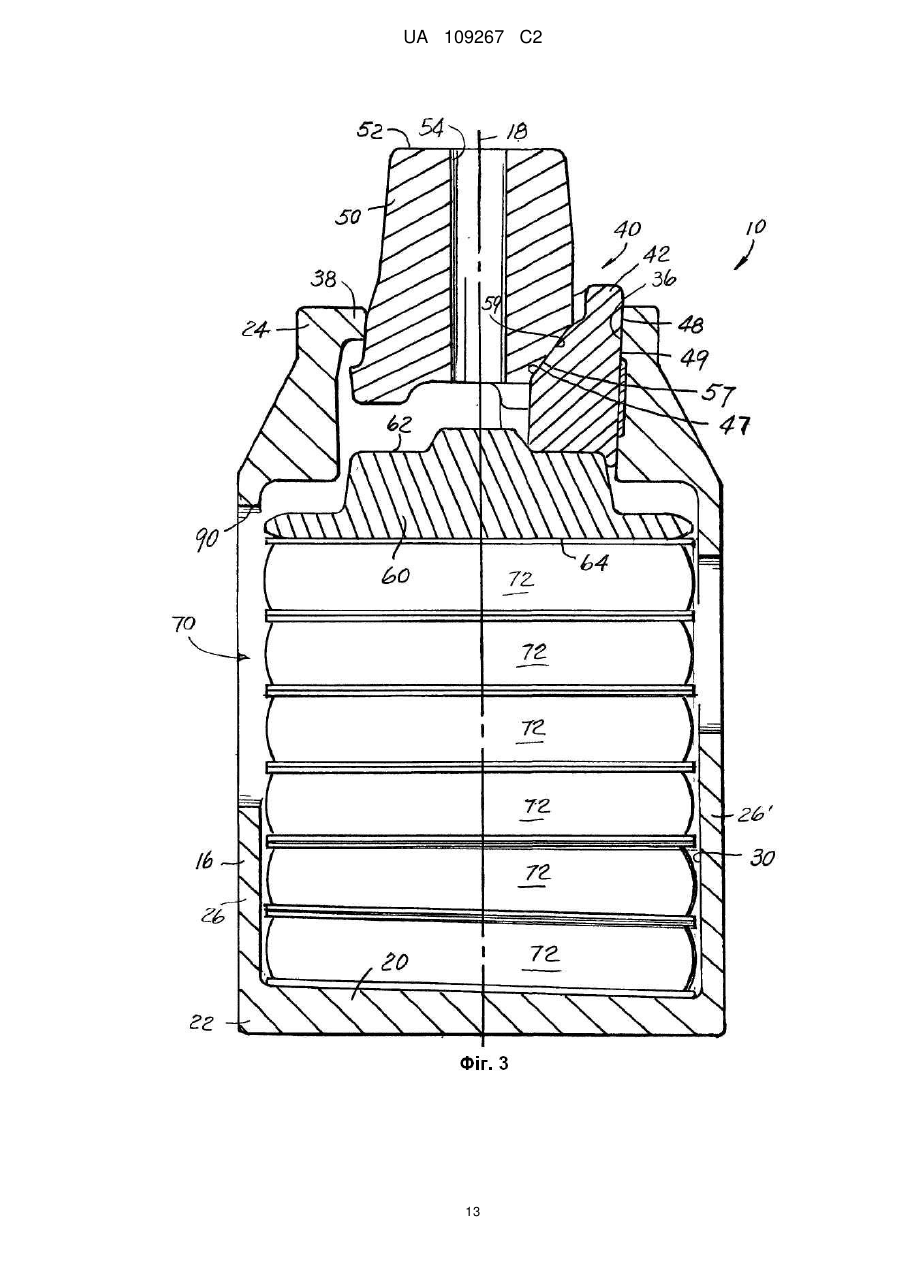
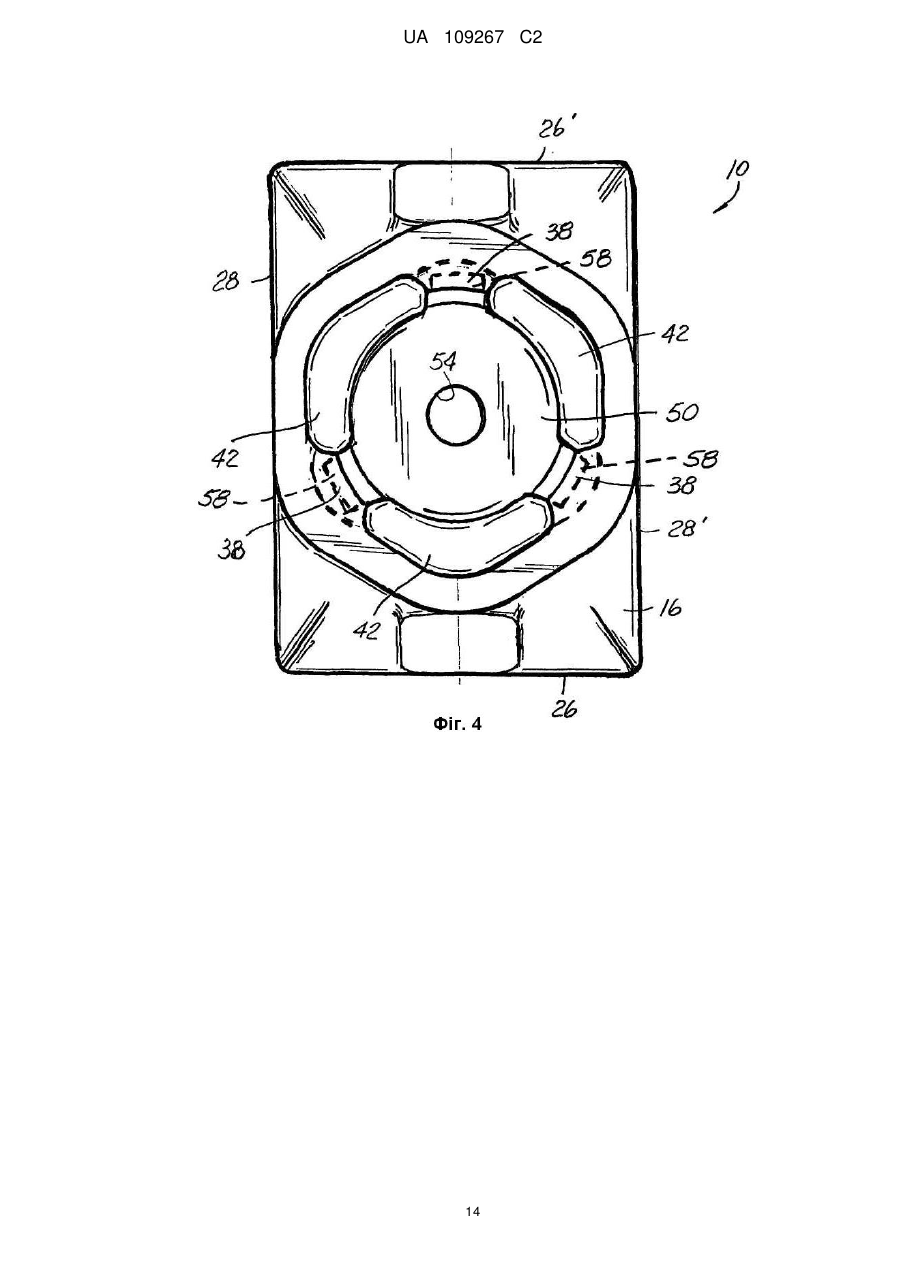
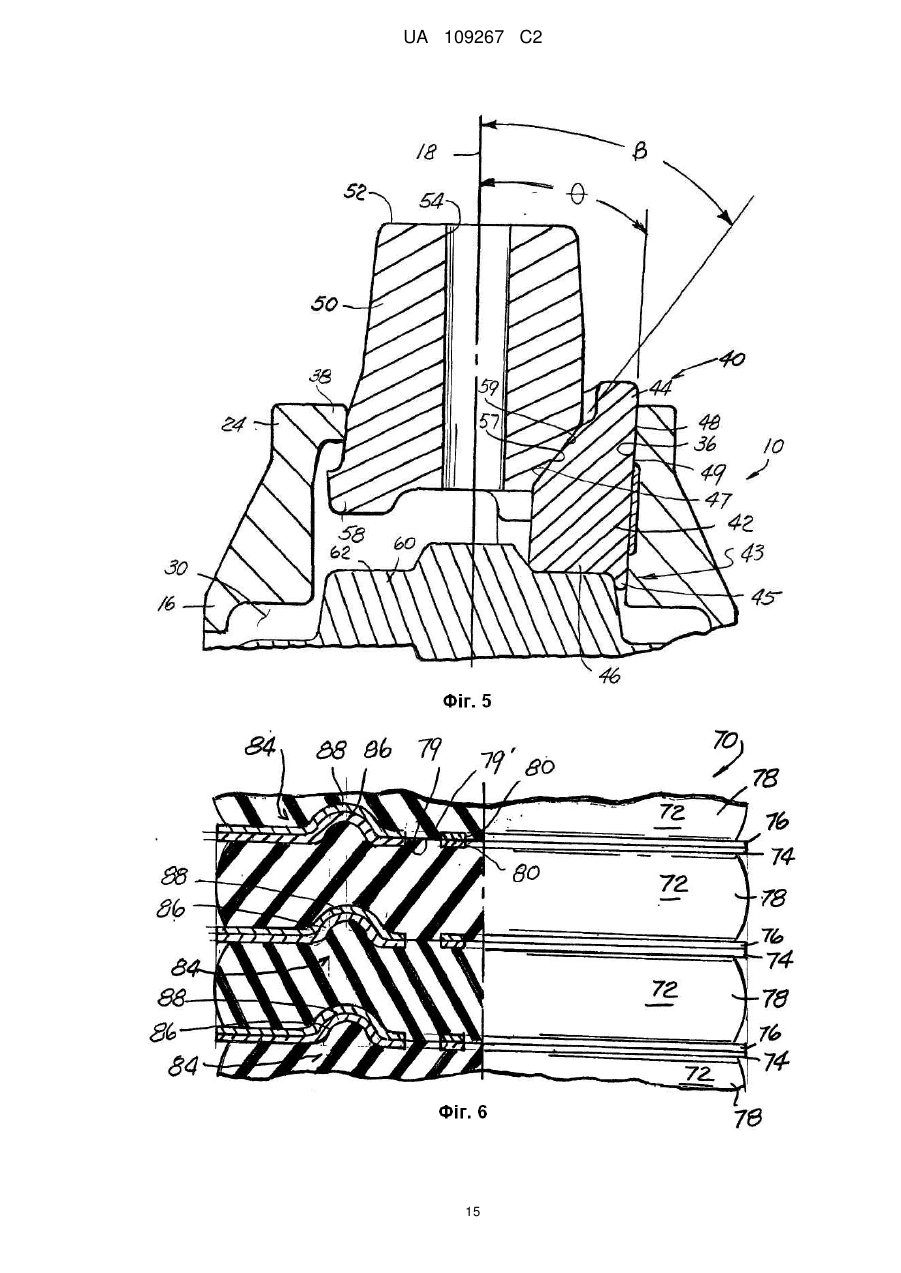
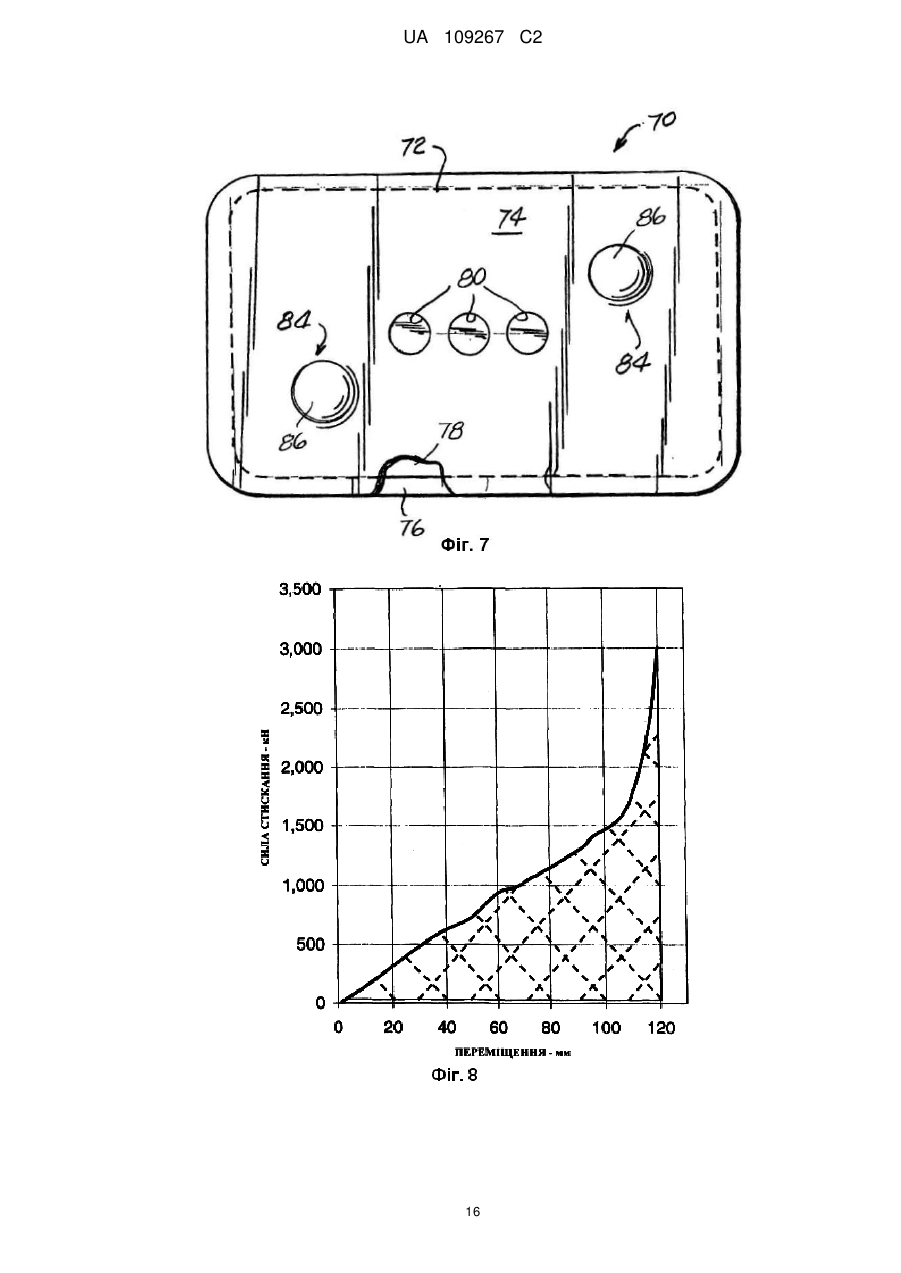
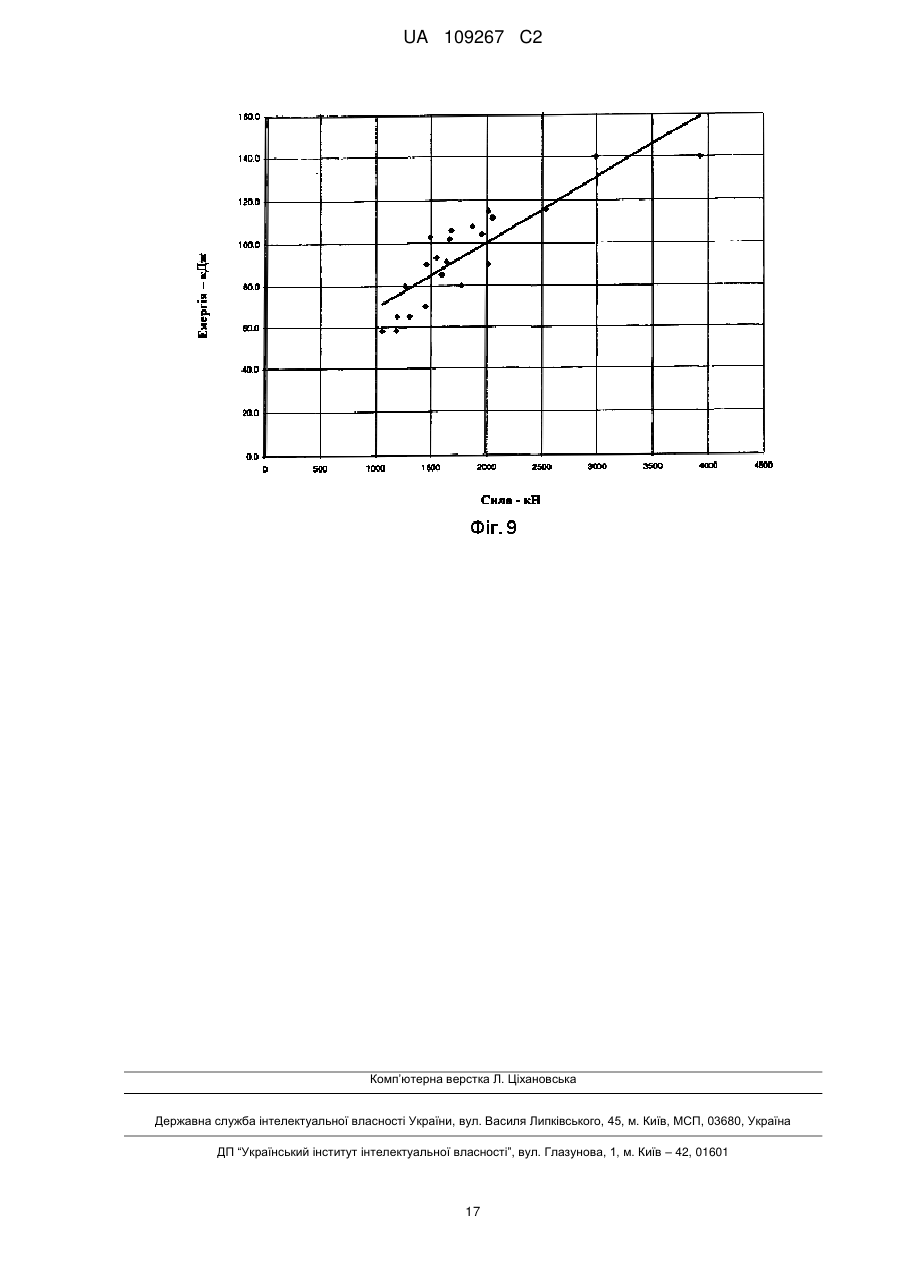
Реферат: Фрикційнио-еластомерний поглинаючий апарат, який має корпус, комплект пружин, розташований у корпусі, та комплект фрикційної муфти, який має клиноподібний елемент і визначає першу ковзну фрикційну поверхню, розташовану під кутом θ відносно подовжньої осі поглинаючого апарата, та другу фрикційну поверхню, розташовану під кутом β відносно подовжньої осі поглинаючого апарата. Комплект пружин є сконструйованим у комбінації з кутами θ та β першої та другої поверхонь фрикційного ковзання відносно подовжньої осі таким чином, що поглинаючий апарат у стійкому й повторюваному режимі витримує від приблизно 100 кДж та 130 кДж енергії, яка діє при менш ніж трьох меганьютонах, у діапазоні переміщення клиноподібного елемента у внутрішньому осьовому напрямку відносно корпусу поглинаючого апарата, що не перевищує 120 мм. UA 109267 C2 (12) UA 109267 C2 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь винаходу Цей винахід в цілому стосується поглинаючих апаратів залізничних вагонів, більш конкретно - поглинаючого апарата залізничного вагона, спеціально призначеного для стійкого й повторюваного витримування до приблизно 130 кДж енергії, яка діє на вищезгаданий поглинаючий апарат при менш, ніж трьох меганьютонах, водночас маючи хід клиноподібного елемента у внутрішньому осьовому напрямку, менший, ніж приблизно 120 мм відносно відкритої кінцевої частини поглинаючого апарата. Рівень техніки Зчіпні системи для сучасних залізничних вагонів зазвичай включають поглинаючий апарат для пом'якшення і поглинання сил, що діють на систему в процесі експлуатації вагона. У традиційних поглинаючих апаратах тягові зусилля, які діють на клиноподібний елемент, що проходить від відкритої кінцевої частини корпусу поглинаючого апарата, розсіюються у корпусі поглинаючого апарата через комплект фрикційної муфти. Відкрита кінцева частина корпусу поглинаючого апарата має певну кількість фрикційних поверхонь, які сходяться на конус усередину, таким чином, що у разі, коли клиноподібний елемент проштовхується всередину корпусу поглинаючого апарата, у відповідь на тягові зусилля, які на нього діють, фрикційні елементи, які утворюють частину комплекту фрикційної муфти, також переміщуються в осьовому напрямку всередину корпусу і радіально назовні за допомогою клиноподібного елемента. Коли ці фрикційні елементи переміщуються радіально назовні, збільшуються сили тертя між фрикційним елементом та корпусом. Крім того, внутрішні кінцеві частини фрикційних елементів спираються на ведений елемент або пружинний упор. Пружинний упор пружно зміщується до фрикційних елементів комплектом пружин, що протидіє осьовому переміщенню всередину фрикційних елементів та клиноподібного елемента. Хоча традиційні поглинаючі апарати мають високу амортизуючу здатність, вони мають тенденцію передавати на конструкцію вагона високу величину сили протягом робочого циклу. Звичайно, передача високої величини сили на конструкцію вагона може призводити до пошкоджень вантажів, які перевозяться у вагонах. Таким чином, існує постійна потреба у поглинаючому апараті, який мав би здатність до поглинання надмірно великих сил під час роботи залізничного вагона, водночас забезпечуючи поліпшену амортизацію між поглинаючим апаратом та конструкцією залізничного вагона. Короткий опис винаходу З врахуванням вищезазначеного і згідно з одним аспектом, забезпечується фрикційний / еластомерний поглинаючий апарат, який включає порожній металевий корпус, відкритий на першому кінці і закритий у напрямку його другого кінця. Корпус визначає подовжню вісь для поглинаючого апарата і має певну кількість внутрішніх поверхонь, які проходять у подовжньому напрямку і сходяться на конус, і які є відкритими у напрямку кінцевої частини корпусу й простягаються від неї. Корпус поглинаючого апарата має дві пари з'єднаних і в цілому паралельних стінок, які простягаються від закритої кінцевої частини у напрямку відкритої кінцевої частини, таким чином, що корпус визначає порожню камеру, яка має в цілому прямокутну у розрізі конфігурацію і проходить по більшій частині довжини корпусу і є відкритою до його відкритої кінцевої частини. Фрикційні елементи розташовуються з однаковими інтервалами навколо подовжньої осі на першому кінці корпусу. Кожен фрикційний елемент має відокремлені подовжньою відстанню перший та другий кінці та зовнішню поверхню, яка проходить між ними. Зовнішня поверхня на кожному фрикційному елементі функціонально з'єднується з однією з внутрішніх поверхонь, які проходять у подовжньому напрямку і сходяться на конус на корпусі таким чином, щоб визначати першу похилу поверхню фрикційного ковзання між ними. Клиноподібний елемент утворюється від осьового переміщення відносно відкритої кінцевої частини корпусу. Клиноподібний елемент визначає певну кількість зовнішніх конічних поверхонь, розташованих з однаковими інтервалами навколо подовжньої осі корпусу, і у кількості, що дорівнює кількості фрикційних елементів. Кожна зовнішня конічна поверхня на клиноподібному елементі функціонально з'єднується з внутрішньою поверхнею на кожному фрикційному елементі таким чином, щоб визначати другу похилу поверхню фрикційного ковзання між ними, і таким чином, щоб клиноподібний елемент змушував фрикційні елементи переміщуватися радіально назовні після переміщення клиноподібного елемента всередині корпусу. Пружинний упор розташовується у межах порожньої камери корпусу поглинаючого апарата і в цілому проходить перпендикулярно подовжній осі поглинаючого апарата. Пружинний упор перебуває у функціональному зачепленні з другим кінцем кожного фрикційного елемента. Комплект пружин розташовується у порожній камері поглинаючого апарата між закритою кінцевою частиною корпусу та пружинним упором для зберігання, розсіювання та повернення 1 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 енергії, яка передається до поглинаючого апарата. Комплект пружин включає осьовий пакет окремих еластомерних пружин. Кожна окрема еластомерна пружина включає еластомерну подушку, яка має в цілому прямокутну форму, що приблизно відповідає конфігурації розрізу камери корпусу, що, таким чином, оптимізує здатність комплекту пружин до зберігання, розсіювання та повернення енергії, яка передається до поглинаючого апарата під час його роботи. Для підвищення здатності до поглинання надмірно великих сил під час роботи залізничного вагона з одночасним забезпеченням поліпшеної амортизації між поглинаючим апаратом та конструкцією залізничного вагона комплект пружин у комбінації з кутом першої та другої поверхонь фрикційного ковзання відносно подовжньої осі поглинаючого апарата у стійкому й повторюваному режимі витримує приблизно 100 кДж енергії, яка передається до поглинаючого апарата при двох меганьютонах у діапазоні переміщення клиноподібного елемента у внутрішньому осьовому напрямку відносно корпусу приблизно 900 мм. В одній формі принаймні одна стінка корпусу поглинаючого апарата визначає отвір, крізь який окремі еластомерні пружини можуть переміщуватись у порожню камеру, яка обмежується корпусом поглинаючого апарата. В оптимальному варіанті перша поверхня фрикційного ковзання між зовнішньою поверхнею кожного фрикційного елемента та однією з внутрішніх поверхонь, які проходять у подовжньому напрямку і сходяться на конус на корпусі поглинаючого апарата, розташовується під кутом від приблизно 1,7° до приблизно 2° відносно подовжньої осі поглинаючого апарата. В іншій формі друга поверхня фрикційного ковзання між кожною зовнішньою конічною поверхнею на клиноподібному елементі та внутрішньою поверхнею на кожному фрикційному елементі розташовується під кутом від приблизно 32° до приблизно 45° відносно подовжньої осі поглинаючого апарата. В оптимальному варіанті втілення кожен фрикційний елемент також включає конструкцію, яка перебуває у робочій комбінації з пружинним упором для підтримання кожного фрикційного елемента у взаємній робочій позиції з клином під час роботи поглинаючого апарата. В оптимальній формі еластомерна подушка кожної окремої еластомерної пружини є виконаною з поліестерного матеріалу, який має твердість D за Шором приблизно від 40 до 60 і співвідношення пружної деформації з пластичною деформацією більше за 1,5 до 1. Крім того, еластомерна подушка кожної окремої еластомерної пружини в оптимальному варіанті включає металеву пластину на протилежних плоских сторонах кожної еластомерної подушки. В оптимальному варіанті кожна металева пластина включає конструкцію, яка зачеплюється з подібною конструкцією сусідньої еластомерної пружини для утримання окремих еластомерних пружин у формі пакета з пружин, розташованих в цілому на одній лінії відносно одна одної. Згідно з іншим аспектом, забезпечується фрикційний / еластомерний поглинаючий апарат для залізничного вагона, який включає видовжений уздовж осі металевий корпус, який має закриту кінцеву частину та відкриту кінцеву частину. Корпус визначає подовжню вісь для поглинаючого апарата. Корпус також включає дві пари з'єднаних бокових стінок, які в цілому простягаються від закритої кінцевої частини на більшості подовжньої відстані між кінцевими частинами, таким чином, щоб обмежувати порожню камеру, яка має в цілому прямокутну у розрізі конфігурацію. Комплект фрикційної муфти передбачено для поглинання подовжніх ударів, спрямованих на поглинаючий апарат. Комплект фрикційної муфти включає певну кількість фрикційних елементів, причому кожен фрикційний елемент, у комбінації з відкритою кінцевою частиною корпусу поглинаючого апарата, визначає першу фрикційну поверхню, розташовану під кутом 6 відносно подовжньої осі поглинаючого апарата. Комплект фрикційної муфти також включає привідний механізм, який має певну кількість похилих поверхонь і в осьовому напрямку простягається за межі відкритої кінцевої частини корпусу для приймання енергії, спрямованої в осьовому напрямку на поглинаючий апарат. Кожна похила поверхня на привідному механізмі перебуває у ковзній фрикційній взаємодії з внутрішньою поверхнею на кожному фрикційному елементі й визначає другу фрикційну поверхню, розташовану під кутом β відносно подовжньої осі поглинаючого апарата. Пружинний упор перебуває у робочій комбінації з певною кількістю фрикційних елементів. Комплект еластомерних пружин є відцентрованим і вставленим у ковзному режимі у прямокутну порожню камеру корпусу. Комплект пружин включає групу розташованих пакетом в осьовому напрямку окремих одиниць між закритою кінцевою частиною корпусу та пружинним упором для поглинання, розсіювання та повернення енергії, яка передається до привідного механізму під час роботи поглинаючого апарата. Кожна одиниця включає пару відокремлених проміжком металевих пластин, розташованих в цілому перпендикулярно подовжній осі. Кожна металева пластина у плані має в цілому прямокутну конфігурацію. Еластомерна пружина, яка має у плані в цілому прямокутну конфігурацію, є закріпленою між металевими пластинами. Комплект пружин у комбінації з кутами першої та другої ковзних поверхонь відносно подовжньої 2 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 осі поглинаючого апарата у стійкому й повторюваному режимі витримує приблизно 130 кДж енергії, яка передається до поглинаючого апарата при трьох меганьютонах у діапазоні переміщення клиноподібного елемента у внутрішньому осьовому напрямку відносно корпусу, що не перевищує приблизно 120 мм. Принаймні одна бокова стінка корпусу поглинаючого апарата в оптимальному варіанті визначає отвір, крізь який окремі одиниці комплекту пружин можуть переміщуватись у камеру, обмежену корпусом. В оптимальній формі кут 6 першої фрикційної поверхні, що визначається кожним фрикційним елементом та корпусом поглинаючого апарата, становить від приблизно 1,7° до приблизно 2° відносно подовжньої осі поглинаючого апарата. Крім того, кут β другої фрикційної поверхні, що визначається між кожною зовнішньою конічною поверхнею на клиноподібному елементі та внутрішньою поверхнею на кожному фрикційному елементі комплекту фрикційної муфти, в оптимальному варіанті становить від приблизно 32° до приблизно 45° відносно подовжньої осі поглинаючого апарата. В одній формі кожен фрикційний елемент також включає конструкцію, яка перебуває у робочій комбінації з пружинним упором для підтримання фрикційних елементів у функціональному відношенні відносно клина під час роботи поглинаючого апарата. В оптимальному варіанті еластомерна пружина кожної окремої одиниці комплекту пружин є виконаною з поліестерного матеріалу, який має твердість D за Шором приблизно від 40 до 60 та співвідношення пружної деформації з пластичною деформацією більше за 1,5 до 1. Крім того, кожна металева пластина кожної окремої одиниці комплекту еластомерних пружин в оптимальному варіанті включає конструкцію, яка зачеплюється з подібною конструкцією сусідньої одиниці комплекту еластомерних пружин для утримання окремих одиниць у формі пакета з пружин, розташованих в цілому на одній лінії відносно одна одної. Згідно з ще одним аспектом, забезпечується фрикційний / еластомерний поглинаючий апарат для залізничного вагона, який включає металевий корпус, який має закриту кінцеву частину та відкриту кінцеву частину, розташовані на одній лінії відносно одна одної уздовж подовжньої осі. Корпус має порожню камеру, яка обмежується двома парами в цілому паралельних і з'єднаних стінок, таким чином, щоб забезпечувалася камера з в цілому прямокутним розрізом, яка простягається від закритої кінцевої частини у напрямку відкритої кінцевої частини. Група фрикційних поверхонь, які сходяться на конус, проходить від відкритої кінцевої частини до закритої кінцевої частини корпусу. Група відокремлених однаковими інтервалами фрикційних елементів розташовується у ковзному режимі у відкритій кінцевій частині корпусу. Зовнішня похила поверхня на кожному фрикційному елементі функціонально з'єднується зі звуженою на конус фрикційною поверхнею на корпусі таким чином, щоб визначати першу поверхню фрикційного ковзання між ними. Клиноподібний елемент, який має вільний кінець, який простягається за межі відкритої кінцевої частини корпусу, також має певну кількість зовнішніх похилих фрикційних поверхонь, які контактують з внутрішніми похилими поверхнями на фрикційних елементах, і є пристосованим для приведення їх у дію після їх переміщення всередину корпусу. Друга поверхня фрикційного ковзання утворюється між зовнішніми фрикційними поверхнями на клиноподібному елементі та внутрішніми похилими поверхнями на фрикційних елементах. Комплект еластомерних пружин є відцентрованим і вставленим у ковзному режимі у прямокутну порожню камеру корпусу і складається з групи розташованих пакетом в осьовому напрямку окремих одиниць розташованих між закритою кінцевою частиною корпусу для опору переміщенню клиноподібного елемента всередину під час роботи поглинаючого апарата. Один кінець комплекту пружин розташовується навпроти закритої кінцевої частини корпусу. Другий кінець комплекту пружин притискає пружинний упор, розташований в цілому перпендикулярно подовжній осі поглинаючого апарата, до одного кінця фрикційних елементів. Кожна одиниця комплекту пружин включає пару відокремлених проміжком металевих пластин, розташованих в цілому перпендикулярно подовжній осі, причому кожна металева пластина у плані має в цілому прямокутну конфігурацію, і в цілому еластомерна пружина у плані має в цілому прямокутну конфігурацію. Комплект пружин у комбінації з кутом першої та другої фрикційних поверхонь відносно подовжньої осі поглинаючого апарата у стійкому й повторюваному режимі витримують від приблизно 100 кДж до приблизно 130 кДж енергії, яка передається до поглинаючого апарата при менш, ніж трьох меганьютонах, і у діапазоні переміщення клиноподібного елемента у внутрішньому осьовому напрямку відносно корпусу від приблизно 90 мм до приблизно 120 мм. Для полегшення складання поглинаючого апарата принаймні одна стінка корпусу поглинаючого апарата в оптимальному варіанті визначає отвір, крізь який одиниці, які включають комплект пружин, можуть переміщуватись у порожню камеру, обмежену корпусом. В оптимальному варіанті перша поверхня фрикційного ковзання, між кожним фрикційним 3 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 елементом та корпусом поглинаючого апарата, розташовується під кутом від приблизно 1,7° до приблизно 2° відносно подовжньої осі поглинаючого апарата. В оптимальній формі друга поверхня фрикційного ковзання, між зовнішніми фрикційними поверхнями на клиноподібному елементі та внутрішніх похилих поверхнях на фрикційних елементах, розташовується під кутом від приблизно 32° до приблизно 45° відносно подовжньої осі поглинаючого апарата. Кожен фрикційний елемент також в оптимальному варіанті включає конструкцію, яка перебуває у робочій комбінації з пружинним упором для підтримання кожного фрикційного елемента у належній позиції відносно клина під час роботи поглинаючого апарата. Еластомерна пружина кожної окремої одиниці комплекту пружин в оптимальному варіанті є утвореною з поліестерного матеріалу, який має твердість D за Шором приблизно від 40 до 60 і співвідношення пружної деформації з пластичною деформацією більше за 1,5 до 1. Крім того, металева пластина кожної окремої одиниці комплекту пружин в оптимальному варіанті включає конструкцію, яка зачеплюється з подібною конструкцією сусідньої окремої одиниці для утримання окремих еластомерних пружин у формі пакета з пружин, розташованих в цілому на одній лінії відносно одна одної. Опис фігур Фіг. 1 є вертикальною боковою проекцією однієї форми поглинаючого апарата, в якому втілюються особливості та принципи розкриття цього винаходу; Фіг. 2 є розрізом уздовж лінії 2-2 з Фіг. 1; Фіг. 3 є подовжнім вертикальним розрізом поглинаючого апарата, показаного на Фіг. 1; Фіг. 4 є горизонтальною проекцією поглинаючого апарата, показаного на Фіг. 1; Фіг. 5 є збільшеним розрізом одного кінця поглинаючого апарата, показаного на Фіг. 3; Фіг. 6 є частковим розрізом пружинної одиниці, яка утворює частину видовженого уздовж осі комплекту еластомерних пружин для поглинаючого апарата, уздовж лінії 6-6 з Фіг. 2; Фіг. 7 є горизонтальною проекцією однієї форми окремої пружинної одиниці, яка утворює частину комплекту еластомерних пружин, частково показаного на Фіг. 6; Фіг. 8 є схематичним зображенням дії поглинаючого апарата, в якому втілено принципи та ідеї розкриття цього винаходу; і Фіг. 9 є схематичним зображенням результатів випробування багаторазових ударних навантажень на поглинаючий апарат, у якому втілено принципи та ідеї розкриття цього винаходу. Детальний опис винаходу Хоча винахід може бути втілений у різних формах, на фігурах показується й нижче описується оптимальний варіант втілення, і слід розуміти, що у представленому розкритті викладено типовий приклад, який не обмежує розкриття винаходу конкретним поясненим і описаним варіантом втілення. Серед фігур, на яких однакові умовні номери означають однакові деталі на різних зображеннях, на Фіг. 1 показано поглинаючий апарат залізничного вагона, в цілому позначений умовним номером 10, пристосований для перенесення у хомуті 12, що перебуває у робочій комбінації з хребтовою балкою (не показано) залізничного вагона 14. Поглинаючий апарат 10 включає видовжений уздовж осі порожній і металевий корпус 16, який визначає подовжню вісь 18 для поглинаючого апарата 10. Корпус 16 закривається торцевою стінкою 20 (Фіг. 3) у першій або закритій кінцевій частині 22 і є відкритим у напрямку вирівняної уздовж осі другої або відкритої кінцевої частини 24. Корпус 16 включає дві пари з'єднаних і в цілому паралельних стінок 26, 26' та 28, 28' (Фіг. 2), які простягаються від закритої кінцевої частини 22 у напрямку відкритої кінцевої частини 24 і визначають порожню камеру 30 у межах корпусу 16 (Фігури 2 та 3). Як показано на Фіг. 2, стінки корпусу 26, 26' та 28, 28' забезпечують камеру корпусу 30 з в цілому прямокутною або коробчастою конфігурацією розрізу по більшій частині її довжини. Крім того, як показано на Фіг. 3, корпус 16 має певну кількість (з показом лише однієї на Фіг. 3) розташованих з однаковими кутовими інтервалами і орієнтованих у подовжньому напрямку внутрішніх похилих фрикційних поверхонь 36, що сходяться на конус. Внутрішня похила фрикційна поверхня 36, що сходиться на конус, на корпусі 16 звужується у напрямку подовжньої осі 18 і у напрямку закритої кінцевої частини 22 корпусу поглинаючого апарата 16. В оптимальному варіанті корпус 16 оснащено трьома розташованими з однаковими інтервалами орієнтованими у подовжньому напрямку внутрішніми похилими фрикційними поверхнями 36, що сходяться на конус, але може бути передбачена й більша кількість поверхонь, що сходяться на конус, без зашкодження й відхилення від сутності та новизни розкриття цього винаходу. У варіанті втілення, показаному на Фіг. 3, поглинаючий апарат 10 також має комплект фрикційної муфти 40 для поглинання тягових зусиль або ударів, спрямованих в осьовому напрямку на поглинаючий апарат 10. У варіанті втілення, показаному на Фіг. 3, комплект 4 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 фрикційної муфти 40 включає певну кількість фрикційних елементів або башмаків 42, розташованих навколо осі 18 і у робочій комбінації з відкритою кінцевою частиною корпусу поглинаючого апарата 16. Як показано для прикладу на Фіг. 4, комплект фрикційної муфти 40 може мати три розташовані з однаковими кутовими інтервалами фрикційні елементи 42 але може бути передбачена й більша кількість фрикційних елементів без зашкодження й відхилення від сутності та новизни розкриття цього винаходу. Досить сказати, що у варіанті втілення, показаному для прикладу на Фігурах 1, 3 та 4, кількість фрикційних елементів 42, які утворюють частину комплекту фрикційної муфти 40, дорівнює кількості внутрішніх похилих фрикційних поверхонь 36, що сходяться на конус, на корпусі 16. Як показано на Фіг. 5, кожен фрикційний елемент 42 має розташовані на осьовій або подовжній відстані перший та другий кінці 44 та 46. Крім того, кожен фрикційний елемент 42 має зовнішню ковзну поверхню 48, що сходиться на конус. Коли поглинаючий апарат 10 перебуває у зібраному стані, кожна внутрішня похила фрикційна поверхня 36 на корпусі 16 комбінується з кожною зовнішньою ковзною поверхнею 48, що сходиться на конус на кожному фрикційному елементі для визначення першої похилої поверхні фрикційного ковзання 49 між ними. Перша поверхня фрикційного ковзання 49 розташовується під кутом θ відносно подовжньої осі 18 вузла поглинаючого апарата 10. В оптимальному варіанті кут θ першої поверхні фрикційного ковзання 49 становить від приблизно 1,7 градуса до приблизно 2 градусів відносно подовжньої осі 18 поглинаючого апарата 10. У показаному варіанті втілення комплект фрикційної муфти 40 також включає клиноподібний елемент або привідний механізм 50, передбачений для подовжнього переміщення відносно відкритої кінцевої частини 20 корпусу 16. Як показано на Фігурах 1, 3 та 5, зовнішній кінець 52 клиноподібного елемента 50 в оптимальному варіанті має в цілому плоску поверхню і проходить за межами відкритої кінцевої частини 20 корпусу 16 на відстань, яка складає приблизно 90 мм та приблизно 120 мм і є пристосованим для спирання на звичайний ведений елемент (не показано) зчіпного механізму, пристосованого таким чином, щоб тягові або ударні сили могли діяти в осьовому напрямку на поглинаючий апарат 10 під час роботи залізничного вагона 10. Як відомо, клиноподібний елемент 50 перебуває у робочій комбінації з фрикційними елементами 42. Клиноподібний елемент або привідний механізм 50 визначає певну кількість зовнішніх звужених на конус похилих фрикційних поверхонь 57, які перебувають у робочій комбінації з фрикційними елементами 42 комплекту зубчастої муфти 40. Хоча на Фіг. 5 показано лише одну фрикційну поверхню 57, кількість фрикційних поверхонь 57 на клиноподібному елементі 50 дорівнює кількості фрикційних елементів 42, які застосовують як частину комплекту фрикційної муфти 40. Коли поглинаючий апарат 10 перебуває у зібраному стані, кожна зовнішня похила фрикційна поверхня 57 на клиноподібному елементі 50 комбінується з внутрішньою похилою ковзною поверхнею 47 на кожному фрикційному елементі для визначення другої похилої поверхні фрикційного ковзання 59 між ними. Друга поверхня фрикційного ковзання 59 розташовується під кутом β відносно подовжньої осі 18 поглинаючого апарата 10. В оптимальному варіанті кут β другої поверхні фрикційного ковзання 59 комплекту фрикційної муфти 40 становить від приблизно 32 градусів до приблизно 45 градусів відносно подовжньої осі 18 поглинаючого апарата 10. Клиноподібний елемент 50 виконують з будь-якого прийнятного металевого матеріалу. В оптимальній формі клиноподібний елемент 50 є виконаним з ізотермічно відпущеного ковкого залізного матеріалу. Крім того, як показано на Фігурах 1 та 5, клиноподібний елемент або привідний механізм 50 визначає розташований в цілому по центру орієнтований у подовжньому напрямку отвір 54. Як показано на Фігурах 3, 4 та 5, на відкритій кінцевій частині 20 корпус 16 має групу радіально вкручених опорних виступів 38, розташованих з однаковими кутовими інтервалами по окружності відносно один одного. У напрямку його задньої частини клиноподібний елемент 50 включає групу радіально виступаючих назовні виступів 58, які розташовуються з однаковими кутовими інтервалами відносно один одного і проходять між сусідніми фрикційними елементами 42 таким чином, щоб у робочому стані зачеплюватися з задньою частиною виступів 38 на корпусі 16 й сприяти складанню поглинаючого апарата 10. Як показано на Фіг. 3, поглинаючий апарат 10 також включає пружинний упор або ведений елемент 60, розташований у порожній камері 30 корпусу 16 і орієнтований в цілому перпендикулярно подовжній осі 18 поглинаючого апарата 10. Пружинний упор 60 є пристосованим для зворотно-поступальних подовжніх або осьових переміщень у межах камери 30 корпусу 16 і має першу поверхню 62 у функціональному зв'язку з другим або заднім кінцем 5 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 46 кожного фрикційного елемента 42. Пружинний упор 60 також має другу або пристосовану для пружинного контакту поверхню 64. У формі, показаній для прикладу на Фіг. 5, кожен фрикційний елемент 42 комплекту зубчастої муфти 40 також включає конструкцію 43, яка перебуває у робочій комбінації з пружинним упором 60 для утримання кожного фрикційного елемента 42 у належній позиції відносно клина 50 під час роботи поглинаючого апарата 10. У формі, показаній на Фіг. 5, така конструкція включає напрямну 45, яка виступає донизу від другого або нижнього кінця 46 кожного фрикційного елемента 42. Як показано, напрямна 45 на кожному фрикційному елементі 42 є захопленою у ковзному режимі між корпусом поглинаючого апарата 16 та пружинним упором 60, таким чином, утримуючи кожен фрикційний елемент 42 у належній позиції відносно клина 50, коли фрикційні елементи 42 переміщуються у корпусі 16 у відповідь на осьові переміщення клина 50 під час роботи поглинаючого апарата 10. Видовжений уздовж осі комплект еластомерних пружин 70 є в цілому відцентрованим і ковзає у межах камери 30 корпусу поглинаючого апарата 16 і утворює пружну колонку для зберігання, розсіювання та повернення енергії, яка діє або прикладається до вільного кінця 52 клиноподібного елемента 50 під час осьового стискання поглинаючого апарата 10. Один кінець комплекту пружин 70 перебуває у контакті з торцевою стінкою 20 корпусу 16. Другий кінець комплекту пружин 70 притискається до поверхні 64 пружинного упору 60 для протидії переміщення фрикційних елементів 42 та клиноподібного елемента 50 всередину. Як відомо, комплект пружин 70 піддають попередньому стисканню під час складання поглинаючого апарата 10, і він служить для утримання компонентів комплекту фрикційної муфти 40, включаючи фрикційні елементи 42 та клиноподібний елемент 50, які перебувають у функціональній комбінації відносно одне одного і у межах корпусу поглинаючого апарата 16 як під час роботи поглинаючого апарата 10, так і протягом періодів, коли поглинаючий апарат 10 не працює. У показаному варіанті втілення комплект пружин 70 розвиває попереднє навантаження приблизно 10000 фунтів для поглинаючого апарата 10 і може поглитати, розсіювати й повертати удари або енергію, спрямовані на нього в осьовому напрямку, у межах від 450 000 фунтів до приблизно 700 000 фунтів. У формі, показаній на Фіг. 3, комплект пружин 70 складається з певної кількості окремих одиниць або пружин 72, розташованих пакетом уздовж осі одна за одною. У формі, показаній на Фіг. 6, кожен амортизаційний елемент або пружина 72 включає пару по суті прямокутних металевих пластин 74 та 76 та еластомерну подушку або пружину 78, яка також має в цілому прямокутну форму, для оптимізації прямокутної зони порожньої камери 30 (Фіг. 3), причому комплект пружин 70 є відцентрованим у ковзному режимі для осьових подовжніх переміщень у відповідь на навантаження або удари, які діють у в осьовому напрямку на поглинаючий апарат 10 (Фіг. 1). В оптимальному варіанті еластомерна подушка або пружина 78 є сконфігурованою таким чином, щоб обмежувалось її радіальне розширення у відповідь на навантаження, які на неї діють, що дозволяє запобігати витисканню подушки 78 назовні за межі країв пластин 74, 76 настільки, щоб завдати суттєвого пошкодження або значною мірою погіршити її характеристики. Як показано на Фіг. 6, протилежні кожна з в цілому плоских поверхонь 79 та 79' еластомерної подушки або пружини 78 в оптимальному варіанті кріпиться до кожної з металевих пластин 74, 76 і розташовується між ними в результаті застосування робочого процесу та методології, які належать до типу, описаного у Патенті США № 5, 381, 844, виданому R. A. Carlstedt; його відповідні частини є включеними до цього опису шляхом посилання. В оптимальному варіанті еластомерна подушка 78 є виконаною з поліестерного матеріалу, який має твердість D за Шором приблизно від 40 до 60 і співвідношення пружної деформації з пластичною деформацією приблизно від 1,5 до 1. Досить сказати, що, як детальніше описано у Патенті США № 5,381,844, виданому R. A. Carlstedt, робочий процес та методологія виготовлення кожної пружинної одиниці 72 включає виготовлення попередньої заготовки, яка розташовується між пластинами 74, 76. Попередня заготовка з еластомеру разом з пластинами 74, 76 піддається попередньому стисканню більш, ніж на 30 % попередньої висоти заготовки, що перетворює заготовку на еластомерну пружину. Пластини 74, 76 в оптимальному варіанті мають подібну конструкцію для вигідного зниження виробничих витрат для кожної пружинної одиниці 72. В оптимальному варіанті втілення кожна пластина 74, 76 має один або кілька отворів або наскрізних отворів 80, розташованих в цілому по центру. Під час робочого процесу, описаного вище для кожної одиниці 72, еластомерний матеріал заготовки заходить в отвори й зачеплюється з боковим краєм кожного отвору 80, таким чином, посилюючи кріплення подушки 78 до кожної з пластин 74, 76. В оптимальному варіанті пластини 74, 76 кожної еластомерної пружинної одиниці 72 також включають конструкцію 84, яка зачеплюється з подібною конструкцією на сусідній еластомерній 6 UA 109267 C2 5 10 15 20 25 30 35 пружинній одиниці 72 для утримання окремих еластомерних пружин у формі пакета з пружин, розташованих в цілому на одній лінії відносно одна одної. У формі, показаній на Фіг. 6, пластини 74, 76 в оптимальному варіанті включають виступи 86, які відходять від однієї сторони, та упори 88 на протилежній стороні; причому виступи 86 та упори 88 розташовуються орієнтованими в одну лінію комплектами. В одній формі виступ 86 та упор 88 кожного комплекту забезпечується через витиснений порожній виступ на відповідних пластинах 74, 76 кожної одиниці 72. Як показано на Фігурах 1 та 2, у стінці 26 корпусу поглинаючого апарата 16 в оптимальному варіанті утворено відносно великий прямокутний отвір 90. Отвір 90 має такий розмір, щоб одна або кілька пружинних одиниць 72 могли бути вставлені крізь отвір 90 у напрямку, який в цілому проходить перпендикулярно подовжній осі 18 поглинаючого апарата, у порожню камеру 30 корпусу 16. Крім того, в оптимальній формі, показаній на Фіг. 3, торцева стінка 20 має невеликий кут або нахил приблизно 1,25° у напрямку, який проходить від отвору 90 у корпусі 16. В одній формі, як показано на Фіг. 8, комплект пружин 70 сконструйовано у комбінації з кутами θ та β першої та другої поверхонь фрикційного ковзання 49 та 59, відповідно, відносно подовжньої осі 18, таким чином, що поглинаючий апарат 10 у стійкому й повторюваному режимі витримує приблизно 100 кДж енергії, що діє на нього при двох меганьютонах у діапазоні переміщення клиноподібного елемента 50 у внутрішньому осьовому напрямку відносно корпусу поглинаючого апарата 18 приблизно 900 мм. В альтернативному варіанті, як показано на Фіг. 8, комплект пружин 70 є сконструйованим у комбінації з кутами θ та β першої та другої поверхонь фрикційного ковзання 49 та 59, відповідно, відносно подовжньої осі 18, таким чином що поглинаючий апарат 10 у стійкому й повторюваному режимі витримує приблизно 130 кДж енергії, яка діє на нього при трьох меганьютонах у діапазоні переміщення клиноподібного елемента 50 у внутрішньому осьовому напрямку відносно корпусу поглинаючого апарата 18, що не перевищує 120 мм. У формі, якій віддають найбільшу перевагу, комплект пружин 70 є сконструйованим у комбінації з кутами θ та β першої та другої поверхонь фрикційного ковзання 49 та 59, відповідно, відносно подовжньої осі 18, таким чином, що поглинаючий апарат 10 у стійкому й повторюваному режимі витримує від приблизно 100 кДж та 130 кДж енергії, яка діє при менш, ніж трьох меганьютонах, у діапазоні переміщення клиноподібного елемента 50 у внутрішньому осьовому напрямку відносно корпусу поглинаючого апарата 18, що не перевищує 120 мм. На Фіг. 9 схематично показуються багаторазові удари, спрямовані на поглинаючий апарат 10. З вищенаведеного випливає, що існує можливість виконання численних модифікацій та змін без зашкодження й відхилення від сутності та новизни розкриття цього винаходу. Крім того, слід зазначити, що даний опис призначено для викладення прикладів, які не обмежують розкриття винаходу конкретним представленим варіантом втілення. Натомість передбачено, цей опис охоплює через супровідну формулу винаходу всі ці модифікації та зміни як такі, що охоплюються сутністю та обсягом формули винаходу. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Фрикційно-еластомерний поглинаючий апарат, який включає: порожнистий металевий корпус, відкритий на першому кінці й закритий на його другому кінці, причому корпус визначає подовжню вісь для поглинаючого апарата і має ряд витягнутих в подовжньому напрямку внутрішніх поверхонь, що звужуються, де поверхні відкриті до першого кінця корпусу і простягаються від нього, причому корпус має дві пари з'єднаних і в цілому паралельних стінок, які простягаються від закритого другого кінця до першого кінця, утворюючи порожнисту камеру в цілому прямокутної форми у поперечному перерізі на більшій частині її довжини, та відкриту на відкритому кінці корпусу; ряд фрикційних елементів, розташованих на першому кінці корпусу на однаковій відстані один від одного навколо подовжньої осі корпусу, причому кожен фрикційний елемент має аксіально рознесені перший та другий кінці, а також зовнішню поверхню, розташовану між цими кінцями, при цьому зовнішня поверхня кожного фрикційного елемента знаходиться у функціональному поєднанні з однією з витягнутих в подовжньому напрямку внутрішніх поверхонь, що звужуються, корпусу, з утворенням між ними першої похилої поверхні фрикційного ковзання; клиноподібний елемент, виконаний з можливістю осьового переміщення відносно першого кінця корпусу та з можливістю прикладання до нього зовнішньої сили, причому клиноподібний елемент має ряд зовнішніх поверхонь, що звужуються, розташованих на однаковій відстані одна від іншої навколо подовжньої осі корпусу, причому їх кількість дорівнює кількості фрикційних елементів, при цьому кожна зовнішня поверхня, що 7 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 звужується, на клиноподібному елементі знаходиться у функціональному поєднанні з внутрішньою поверхнею кожного фрикційного елемента, з утворенням між ними другої похилої поверхні фрикційного ковзання, так щоб в результаті переміщення клиновидного елемента всередину корпусу фрикційний елемент переміщався радіально назовні; пружинний упор, розташований у порожнистій камері, одна з поверхонь якого знаходиться у функціональному зачепленні з другим кінцем кожного фрикційного елемента, при цьому кожен фрикційний елемент додатково містить конструктивний елемент, виконаний у функціональному поєднанні з пружинним упором, для підтримання правильного положення кожного фрикційного елемента відносно клиноподібного елемента під час роботи поглинаючого апарата; комплект пружин, розташований у порожнистій камері між закритим кінцем корпусу та другою поверхнею пружинного упора, для поглинання, розсіювання та повернення енергії, що передається поглинаючому апарату, причому комплект пружин включає укладені вздовж осі у вигляді пакета окремі еластомерні пружини, кожна з яких включає еластомерну подушку, що в цілому має прямокутну форму, яка наближена до форми поперечного перерізу порожнистої камери корпусу, для оптимізації поглинаючої та відбиваючої здатності комплекту пружин під час роботи поглинаючого апарата, при цьому принаймні одна стінка корпусу має отвір, крізь який в порожнисту камеру можуть бути встановлені еластомерні пружини; вказаний комплект пружин сконфігурований для функціонування в поєднанні з розташуванням першої та другої похилих поверхонь ковзання відносно подовжньої осі поглинаючого апарата таким чином, що вказаний поглинаючий апарат стабільно й багаторазово витримує 100 кДж енергії, що передається поглинаючому апарату, в той час як рівень сили становить приблизно два меганьютони у межах переміщення клиноподібного елемента в аксіальному напрямку всередину корпусу на понад приблизно 90 мм. 2. Фрикційно-еластомерний поглинаючий апарат за п. 1, який відрізняється тим, що перша похила поверхня фрикційного ковзання розташована під кутом в інтервалі від приблизно 1,7° до приблизно 2° відносно подовжньої осі поглинаючого апарата. 3. Фрикційно-еластомерний поглинаючий апарат за п. 1, який відрізняється тим, що друга похила поверхня фрикційного ковзання розташована під кутом в інтервалі від приблизно 32° до приблизно 45° відносно подовжньої осі поглинаючого апарата. 4. Фрикційно-еластомерний поглинаючий апарат за п. 1, який відрізняється тим, що еластомерна подушка кожної окремої еластомерної пружини виконана з поліестерного матеріалу, який має твердість D за Шором в інтервалі приблизно від 40 до 60, і співвідношення пружної деформації до пластичної деформації більше ніж 1,5 до 1. 5. Фрикційно-еластомерний поглинаючий апарат за п. 4, який відрізняється тим, що кожна еластомерна подушка кожної окремої еластомерної пружини додатково включає металеві пластини на протилежних плоских сторонах еластомерної подушки. 6. Фрикційно-еластомерний поглинаючий апарат за п. 5, який відрізняється тим, що кожна металева пластина включає конструктивний елемент, який взаємозачеплюється з подібним конструктивним елементом суміжної еластомерної пружини для підтримання окремих еластомерних пружин в цілому вирівняними одна відносно іншої та укладеними одна на одну. 7. Фрикційно-еластомерний поглинаючий апарат для залізничного вагона, який включає: видовжений уздовж осі металевий корпус, який має закритий кінець, відкритий кінець та подовжню вісь, яка простягається між цими кінцями, а також дві пари з'єднаних бокових стінок, які простягаються загалом від закритого кінця на всю поздовжню відстань між вказаними кінцями з утворенням порожнистої камери, яка має в цілому прямокутну форму у поперечному перерізі; комплект фрикційного вузла для поглинання аксіальних ударних навантажень, спрямованих на один кінець поглинаючого апарата, де комплект фрикційного вузла включає ряд фрикційних елементів, кожен з яких має зовнішню поверхню, розташовану під кутом до подовжньої осі та яка знаходиться в ковзній фрикційній взаємодії з відкритим кінцем корпусу з утворенням першої похилої поверхні фрикційного ковзання, розташованої під кутом θ до подовжньої осі поглинаючого апарата, причому комплект фрикційного вузла додатково включає привідний механізм, який має ряд похилих поверхонь, один кінець якого аксіально виступає за межі відкритого кінця корпусу, щоб приймати аксіально спрямовану на поглинаючий апарат енергію, а кожна похила поверхня привідного механізму знаходиться у фрикційному ковзному зачепленні з внутрішньою поверхнею відповідного фрикційного елемента з утворенням другої похилої поверхні фрикційного ковзання, розташованої під 8 UA 109267 C2 5 10 15 20 25 30 35 40 45 50 55 60 кутом до подовжньої осі поглинаючого апарата, а також пружинний упор, встановлений у функціональному поєднанні з рядом фрикційних елементів, при цьому кожен фрикційний елемент комплекту фрикційного вузла додатково містить конструктивний елемент, що знаходиться у функціональному поєднанні з пружинним упором для підтримання правильного положення кожного фрикційного елемента відносно клиноподібного елемента під час роботи поглинаючого апарата; комплект еластомерних пружин, встановлених по центру та з можливістю ковзання всередині прямокутної порожнистої камери корпусу, і який складається з ряду укладених один на одний вздовж осі окремих елементів, розташованих між закритим кінцем корпусу та пружинним упором для поглинання, розсіювання та повернення енергії, що передається привідному механізму під час роботи поглинаючого апарата, при цьому кожний елемент включає еластомерну пружину, що має в цілому прямокутну в плані форму, і яка відповідає внутрішній частині порожнистої камери, визначеної металевим корпусом, при цьому принаймні одна бокова стінка корпусу має отвір, крізь який в порожнисту камеру корпусу можуть бути встановлені еластомерні пружини; вказаний комплект пружин сконфігурований для функціонування в поєднанні з похилим розташуванням першої та другої поверхонь ковзання відносно подовжньої осі поглинаючого апарата таким чином, що вказаний поглинаючий апарат стабільно й багаторазово витримує приблизно 130 кДж енергії, що передається поглинаючому апарату, при рівні сили приблизно три меганьютони у межах переміщення клиноподібного елемента в аксіальному напрямку всередину корпусу на не більше ніж приблизно 120 мм. 8. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що кут нахилу першої похилої поверхні фрикційного ковзання до подовжньої осі поглинаючого апарата знаходиться в інтервалі між приблизно 1,7° і приблизно 2°. 9. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що кут нахилу другої похилої поверхні фрикційного ковзання до подовжньої осі поглинаючого апарата знаходиться в інтервалі приблизно між приблизно 32° і приблизно 45°. 10. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що еластомерна пружина кожного окремого елемента комплекту еластомерних пружин виконана з поліестерного матеріалу, який має твердість D за Шором в інтервалі приблизно від 40 до 60, і співвідношення пружної деформації до пластичної деформації більше ніж 1,5 до 1. 11. Фрикційно-еластомерний поглинаючий апарат за п. 7, який відрізняється тим, що еластомерна пружина кожного окремого елемента зазначеного комплекту еластомерних пружин має металеві пластини, прикріплені до його протилежних плоских сторін, та кожна металева пластина кожного окремого елемента зазначеного комплекту еластомерних пружин включає конструктивний елемент, який взаємозачеплюється з подібним конструктивним елементом суміжного елемента зазначеного комплекту еластомерних пружин для підтримання зазначених окремих елементів в цілому вирівняними один відносно іншого та укладеними один на одний. 12. Фрикційно-еластомерний поглинаючий апарат для залізничного вагона, який включає: металевий корпус, що має закритий і відкритий кінці, розташовані співвісно подовжній осі, порожнисту камеру, утворену двома парами в цілому паралельних з'єднаних стінок для забезпечення в цілому прямокутної форми поперечного перерізу камери, що простягається від закритого кінця до відкритого кінця, а також множину фрикційних поверхонь, що звужуються, які простягаються від відкритого кінця до закритого кінця корпусу; ряд розташованих на однаковій відстані один від одного фрикційних елементів, встановлених у відкритому кінці корпусу, при цьому зовнішня похила поверхня кожного фрикційного елемента перебуває у функціональному поєднанні з фрикційною поверхнею корпусу, з утворенням між ними першої похилої поверхні фрикційного ковзання; клиноподібний елемент, що має вільний кінець, який виступає за межі відкритого кінця корпусу і має множину фрикційних поверхонь, що зачіплюються з внутрішніми похилими поверхнями фрикційних елементів з можливістю активації їх під час руху клиноподібного елемента всередину корпусу, де друга похила фрикційна поверхня ковзання визначається між фрикційними поверхнями на клиноподібному елементі та внутрішніми похилими поверхнями фрикційних елементів; комплект еластомерних пружин, встановлених по центру та з можливістю ковзання всередині прямокутної порожнистої камери корпусу, і який складається з ряду укладених один на одний вздовж осі окремих елементів, для перешкоджання руху всередину клиноподібного елемента під час роботи поглинаючого апарата, причому один кінець 9 UA 109267 C2 5 10 15 20 25 30 35 комплекту пружин розміщений напроти закритого кінця корпусу, а другий кінець комплекту пружин притискає пружинний упор, розташований в цілому перпендикулярно подовжній осі поглинаючого апарата, до одного кінця кожного фрикційного елемента, і кожний окремий елемент включає еластомерну пружину, що має в цілому прямокутну в плані форму, і яка відповідає внутрішній частині порожнистої камери, визначеної металевим корпусом, при цьому принаймні одна стінка корпусу має отвір, крізь який в порожнисту камеру корпусу можуть бути встановлені еластомерні пружини, а кожен фрикційний елемент додатково містить конструктивний елемент, встановлений у функціональному поєднанні з пружинним упором для підтримання правильного положення кожного фрикційного елемента відносно клиноподібного елемента під час роботи поглинаючого апарата; вказаний комплект пружин, сконфігурований для функціонування в поєднанні з розташуванням першої та другої похилих поверхонь фрикційного ковзання відносно подовжньої осі поглинаючого апарата таким чином, що вказаний поглинаючий апарат стабільно й багаторазово витримує від приблизно 100 кДж до приблизно 130 кДж енергії, що передається поглинаючому апарату, в той час, як рівень сили не перевищує три меганьютони та у межах переміщення клиноподібного елемента в аксіальному напрямку всередину корпусу в інтервалі від приблизно 90 мм до приблизно 120 мм. 13. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що перша похила поверхня фрикційного ковзання розташована під кутом до подовжньої осі поглинаючого апарата в інтервалі від приблизно 1,7° до приблизно 2°. 14. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що друга похила поверхня фрикційного ковзання розташована під кутом до подовжньої осі поглинаючого апарата в інтервалі від приблизно 32° до приблизно 45°. 15. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що еластомерна пружина кожного окремого елемента комплекту пружин виконана з поліестерного матеріалу, який має твердість D за Шором в інтервалі приблизно від 40 до 60, і співвідношення пружної деформації до пластичної деформації більше ніж 1,5 до 1. 16. Фрикційно-еластомерний поглинаючий апарат за п. 12, який відрізняється тим, що еластомерна пружина кожного окремого елемента зазначеного комплекту еластомерних пружин має металеві пластини, прикріплені до його протилежних плоских сторін, та кожна металева пластина кожного окремого елемента зазначеного комплекту еластомерних пружин включає конструктивний елемент, який взаємозачеплюється з подібним конструктивним елементом суміжного елемента зазначеного комплекту еластомерних пружин для підтримання зазначених окремих елементів в цілому вирівняними один відносно іншого та укладеними один на одний. 10 UA 109267 C2 11 UA 109267 C2 12 UA 109267 C2 13 UA 109267 C2 14 UA 109267 C2 15 UA 109267 C2 16 UA 109267 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Автори англійськоюWilt, Donald, E., Salis, Keith, A., Galindo, Rosie, Pokorski, Robert, J., Jurasek, Kris, C., O'Donnell, William, P.
Автори російськоюУилт Дональд И., Сейлис Кит А., Галиндо Рози, Покорски Роберт Дж., Джуресик Крис К., О'Доннелл Уильям П.
МПК / Мітки
МПК: B61G 9/06
Мітки: фрикційно-еластомерний, апарат, поглинаючий
Код посилання
<a href="https://ua.patents.su/19-109267-frikcijjno-elastomernijj-poglinayuchijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Фрикційно-еластомерний поглинаючий апарат</a>
Фрикційно-еластомерний поглинаючий апарат

Номер патенту: 19882
Опубліковано: 15.01.2007
Автор: Карлстедт Річард А.
МПК: B61F 5/02
Мітки: апарат, поглинаючий, фрикційно-еластомерний
Формула / Реферат:
1. Фрикційно-еластомерний поглинаючий апарат, що містить порожнистий корпус, відкритий у першій кінцевій частині і закритий у напрямку другої кінцевої частини, вищезгаданий корпус має головну вісь і має певну кількість збільшених клиноподібних внутрішніх поверхонь, відкритих у напрямку і подовжньо спрямованих від передньої частини, що межує з першою кінцевою частиною вищезгаданого корпусу, і в напрямку другого кінця вищезгаданого корпусу,...
Поглинаючий апарат

Номер патенту: 88305
Опубліковано: 11.03.2014
Автори: Ткаченко Євген Анатолійович, ТКАЧЕНКО АНАТОЛІЙ ДМИТРОВИЧ, Полтавський Євген Володимирович
МПК: B61G 9/00
Мітки: поглинаючий, апарат
Формула / Реферат:
1. Поглинаючий апарат, що містить корпус, з розміщеними у ньому пружними елементами, який має вигляд рами, утвореної зовнішніми стінками і перпендикулярними до них внутрішніми плитами з осьовим отвором для з'єднання з хвостовиком автозчеплення, та містить обмежувальні стінки, що встановлені паралельно зовнішнім стінкам, який відрізняється тим, що зовнішні стінки та обмежувальні стінки мають виступи, що створюють між собою порожнини, в яких...
Поглинаючий апарат залізничного транспортного засобу
Номер патенту: 19351
Опубліковано: 15.12.2006
Автори: Якін Олександр Іванович, Лапандін В'ячеслав Дмитрович, Діденко Дмитро Вікторович
МПК: B61G 9/00
Мітки: транспортного, засобу, залізничного, апарат, поглинаючий
Формула / Реферат:
1. Поглинаючий апарат залізничного транспортного засобу, що містить корпус, рухомі пластини, нерухомі пластини з металокерамічними брикетами, клини, конус натискний, опорну пластину, внутрішню та зовнішню пружини, який відрізняється тим, що на поверхні рухомої пластини та на поверхні клина з боку нерухомої пластини виконані заглиблення.2. Поглинаючий апарат залізничного транспортного засобу за п. 1, який відрізняється тим, що...
Поглинаючий апарат автозчепу залізничного транспортного засобу
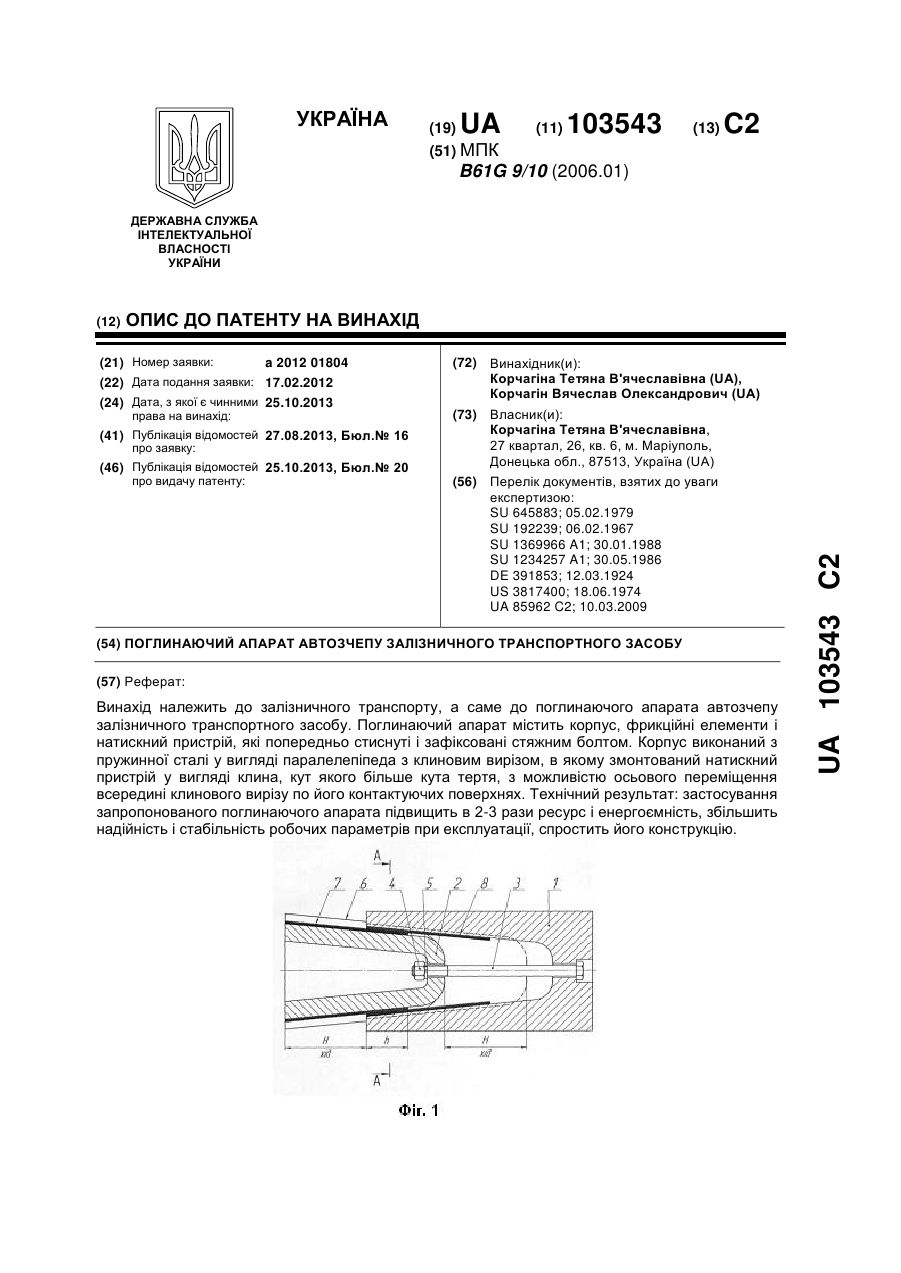
Номер патенту: 103543
Опубліковано: 25.10.2013
Автори: Корчагін В'ячеслав Олександрович, Корчагіна Тетяна В'ячеславівна
МПК: B61G 9/10
Мітки: апарат, транспортного, залізничного, засобу, автозчепу, поглинаючий
Формула / Реферат:
1. Поглинаючий апарат автозчепу залізничного транспортного засобу, що містить корпус, фрикційні елементи і натискний пристрій, які попередньо стиснуті і зафіксовані стяжним болтом, який відрізняється тим, що корпус виконаний з пружинної сталі у вигляді паралелепіпеда з клиновим вирізом, в якому змонтований натискний пристрій у вигляді клина, кут якого більше кута тертя, з можливістю осьового переміщення всередині клинового вирізу по його...
Амортизаційно-поглинаючий апарат для зчіпних пристроїв
Номер патенту: 45204
Опубліковано: 15.03.2002
Автори: Мямлін Сергій Віталійович, Герасименко Євген Миколайович
МПК: B61G 7/00
Мітки: амортизаційно-поглинаючий, пристроїв, зчіпних, апарат
Формула / Реферат:
Амортизаційно-поглинаючий апарат для зчіпних пристроїв, що містить натискний конус, корпус, клини, натискну шайбу та пружини, який відрізняється тим, що корпус амортизаційно-поглинаючого апарата має скрізний отвір для циліндричного штока, на який насаджено натискний елемент, на зовнішній поверхні якого містяться фрикційні планки, а в гніздо натискного елемента заведена пружина малої жорсткості, яка іншим своїм кінцем заведена у гніздо...
Попередній патент: Фармацевтична композиція, що містить агоніст гпп-1 і метіонін
Наступний патент: Пористий ксерогель sio2 з характерним розміром пор
Випадковий патент: Спосіб підвищення інтенсивності росту молодняку кролів