Спосіб контролю геометрії рівчака і стану підтримувальних роликів слябової машини безперервного лиття заготівок
Номер патенту: 15607
Опубліковано: 17.07.2006
Автори: Шишкін Володимир Вікторович, Деліверов Віталій Павлович, Лоза Аркадій Васильович

Формула / Реферат
Спосіб контролю геометрії рівчака і стану підтримувальних роликів слябової машини безперервного лиття заготівок (МБЛЗ), що включає первісне настроювання рівчака з використанням шаблонів, який відрізняється тим, що контроль за зміною первісного настроювання здійснюють безпосередньо в МБЛЗ за допомогою додаткових жорстко закріплених шаблонів, установлених із зазором щодо роликів і обладнаних датчиками, що вимірюють цей зазор, і по зміні зазору судять про величини відхилення, скривлення і зносу роликів.
Текст
Спосіб контролю геометрії рівчака і стану підтримувальних роликів слябової машини безперер 3 15607 4 в ЗВО, згаданий у прототипі, тобто настроювання МБЛЗ. Жорстке закріплення шаблонів до корпусів з використанням шаблонів і нутромірів. Ця операроликових секцій може бути забезпечено будьція є ручною і технічно складною, а результати яким способом з урахуванням особливостей консвимірів містять погрішності, обумовлені кривизною трукції секцій. Кількість контрольних точок і місця (прогином) роликів. Тому фактичне первісне наустановки датчиків по довжині рівчаку МБЛЗ вибистроювання роликового підтримуючого апарата рають з урахуванням бажаної повноти і якості інчасто відрізняється від бажаного, а в ході експлуаформації, що знімається, економічної доцільності і тації МБЛЗ це настроювання погіршується ще технічній можливості обробки даних. Кількість датбільш. На практиці це приводить до стану роликочиків може відповідати кількості роликів (при уставої проводки, де настройка рівчаку нагадує синуновці одного датчика над кожним роликом), чи соїду з непрогнозованим періодом і невідомою перевищувати кількість роликів (при установці величиною відхилення від подовжньої осі машини. більш одного датчика над кожним чи окремим роПри цьому, про дефекти настроювання машини ликами), або вони можуть бути встановлені на дізнаються по появі браку в готовій продукції. окремих ділянках роликової проводки з незадовіВ основу корисної моделі поставлена задача льною статистикою пошкоджуваності роликів. розробити спосіб контролю геометрії рівчаку і стаПрикладом конкретного застосування корисної ну підтримувальних роликів слябової МБЛЗ, у моделі є використання способу діагностики геомеякому за рахунок здійснення нових дій досягається трії рівчаку і стану підтримувальних роликів на можливість безупинного контролю за станом факМБЛЗ Алчевського металургійного комбінату. При тичної геометрії рівчаку, відповідністю цієї геометцьому паралельно рівчаку МБЛЗ, на роликових рії теоретичному профілю, що дозволить поліпшисекціях, з боку широких граней зливка встановлені ти якість зливка і стабілізувати навантаження на два складених шаблони (по одному над кожною основне устаткування ЗВО. широкою гранню сляба, по центрі ширини рівчаку). Для розв'язання поставленої задачі в способі Для кожної секції шаблон виконаний у виді труби контролю геометрії рівчаку і стану підтримувальдіаметром 25мм і зігнутий паралельно утворюючої них роликів слябової МБЛЗ, що включає первісне поверхні рівчаку із зазором між роликами і шаблонастроювання рівчаку з використанням шаблонів, ном 4...6мм. У трубі-шаблоні з боку, зверненої до відповідно до корисної моделі, контроль за зміною роликів, виконані отвори, у які встановлені датчики первісного настроювання здійснюють безпосередпереміщення контактного типу, що фіксують зміну ньо в МБЛЗ за допомогою додаткових жорстко зазору між шаблоном і роликами. Кількість датчизакріплених шаблонів, встановлених із зазором ків у шаблонах відповідає кількості роликів у ЗВО щодо роликів і обладнаних датчиками, що виміпо 90 датчиків на кожнім шаблоні, починаючи з рюють цей зазор, і по зміні зазору судять про вепершої секції від кристалізатора. Сигнали від датличини відхилення, скривлення і зносу роликів. чиків через спеціальний перетворювач видаються В основу пропозиції покладене прагнення зана комп'ютер, установлений на пульті керування безпечити постійний контроль за станом настроюМБЛЗ. На дисплеї мається графічне зображення вання рівчаку МБЛЗ через вимір відхилень роликів теоретичної геометрії рівчаку, і графік фактичного відносно первісного його настроювання, тобто профілю рівчаку, побудованого на підставі отривідносно так званого теоретичного профілю рівчаманих відхилень по сигналах датчиків. Крім того, ку МБЛЗ. Вимір виробляється датчиками, установвеличини відхилень по кожному датчику обробляленими на додаткових шаблонах, жорстко закріпються спеціальною програмою, яка сигналізує про лених до корпусів роликових секцій. Шаблони критичні відхилення і видає рекомендації керуювстановлені із зазором щодо поверхні підтримувачому персоналу про наявність неприпустимих рельних роликів. жимів експлуатації машини, зв'язаних з погіршенЯкщо МБЛЗ працює датчики фіксують зміну ням якості заготівки, що відпивається, або зазору між шаблоном і роликами при повороті роперевантаженнями роликового апарата, а також ликів. Зрозуміло, що при наявності скривлення осі двигунів приводнихроликів. Це дозволяє вибрати ролика ця зміна буде періодичною. При зносі роправильний (оптимальний) режим витягування, що ликів треба очікувати плавного збільшення зазору. виключає пікові навантаження на устаткування, і Стрибкоподібна зміна зазору може свідчити про забезпечує кращу якість товарної продукції. руйнування підшипника або про полом ролика. Таким чином, застосування запропонованої Виміри можуть вироблятися безупинно, або фрагкорисної моделі дозволяє за рахунок постійного ментарно-періодично в будь-який момент часу як контролю за змінами геометрії рівчаку і стану підтпри експлуатації машини, так і в періоди технолоримувальних роликів слябової МБЛЗ поліпшити гічних пауз. Датчики для виміру зазору можуть якість безперервного зливка і стабілізувати наванбути контактні, або безконтактні. Сигнали від даттаження на основне устаткування ЗВО МБЛЗ. чиків надходять до персоналу, що керує роботою Комп’ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for checking the geometry of the pass and state of the supporting rolls of slab machine for continuous casting of billets
Автори англійськоюLoza Arkadii Vasyliovych, Shyshkin Volodymyr Viktorovych
Назва патенту російськоюСпособ контроля геометрии ручья и состояния поддерживающих роликов слябовой машины непрерывного литья заготовок
Автори російськоюЛоза Аркадий Васильевич, Шишкин Владимир Викторович
МПК / Мітки
МПК: B22D 11/00
Мітки: машини, слябової, заготівок, лиття, роликів, стану, безперервного, рівчака, контролю, спосіб, підтримувальних, геометрії
Код посилання
<a href="https://ua.patents.su/2-15607-sposib-kontrolyu-geometri-rivchaka-i-stanu-pidtrimuvalnikh-rolikiv-slyabovo-mashini-bezperervnogo-littya-zagotivok.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю геометрії рівчака і стану підтримувальних роликів слябової машини безперервного лиття заготівок</a>
Кристалізатор машини безперервного лиття заготівок
Номер патенту: 5718
Опубліковано: 15.03.2005
Автори: Титаренко Олександр Іванович, Калашников Андрій Анатолійович, Смирнов Віктор Григорович, Попік Вадим Геннадійович, Вольвач Олександр Євгенійович
МПК: B22D 11/04
Мітки: безперервного, машини, лиття, кристалізатор, заготівок
Формула / Реферат:
Кристалізатор машини безперервного лиття заготівок, що включає широкі стінки, одна з яких має увігнуту робочу поверхню, а друга - опуклу робочу поверхню, розміщені між ними вузькі стінки і встановлені в нижній частині кристалізатора опорні ролики, прикріплені нижче стінок кристалізатора, який відрізняється тим, що опорні ролики, розташовані біля вузьких стінок кристалізатора, виконані з зовнішньою конічною поверхнею, конусність якої...
Спосіб підготовки машини безперервного лиття заготівок до роботи
Номер патенту: 46402
Опубліковано: 15.05.2002
Автори: Петрусенко Віктор Андрійович, Власенко Богдан Васильович, Плугатар Віктор Семенович
МПК: B22D 11/08, B22D 11/14
Мітки: заготівок, роботи, підготовки, лиття, машини, спосіб, безперервного
Формула / Реферат:
Спосіб підготовки машини безперервного лиття заготівок до роботи, при якому вмикають рольганг і тягнучу кліть для переміщення затравки до кристалізатора і встановлення її в заданому положенні відносно кристалізатора, який відрізняється тим, що після входу затравки у тягнучу кліть вмикають механізм відділення затравки і підтискають його робочий орган до нижньої або верхньої поверхні затравки, а після розміщення робочого органа механізму...
Ділянка формування заготівок машини безперервного лиття
Номер патенту: 11496
Опубліковано: 15.12.2005
Автори: Плугатар Віктор Семенович, Широкорад Сергій Іванович, Тіунов Володимир Миколайович, Баначенков Володимир Геннадійович
МПК: B22D 11/08
Мітки: лиття, безперервного, машини, ділянка, заготівок, формування
Формула / Реферат:
Ділянка формування заготівок машини безперервного лиття, до складу якої входить затравка, що складається з головки і тіла, виконаного з жорстко зчленованих верхніх і нижніх ланок, і встановленої між ними пружної сталевої стрічки, та розміщені із кроком ролики зони вторинного охолодження, які утворюють дугу машини безперервного лиття, яка відрізняється тим, що між головкою затравки і тілом розміщена ділянка затравки, яка складається з ланок,...
Проміжний ковш двострумкової машини безперервного лиття заготівок
Номер патенту: 24045
Опубліковано: 31.08.1998
Автори: Юшко Ігор Олегович, Корнієнко Олександр Іванович, Поживанов Михайло Олександрович, Шалімов Олександр Георгійович, Сахно Валерій Олександрович, Троцан Анатолій Іванович, Лєнський Валерій Георгійович, Ніколаєв Геннадій Андрійович, Носоченко Олег Васильович, Рибалов Георгій Васильович
МПК: B22D 11/10
Мітки: ковш, машини, безперервного, заготівок, проміжний, двострумкової, лиття
Формула / Реферат:
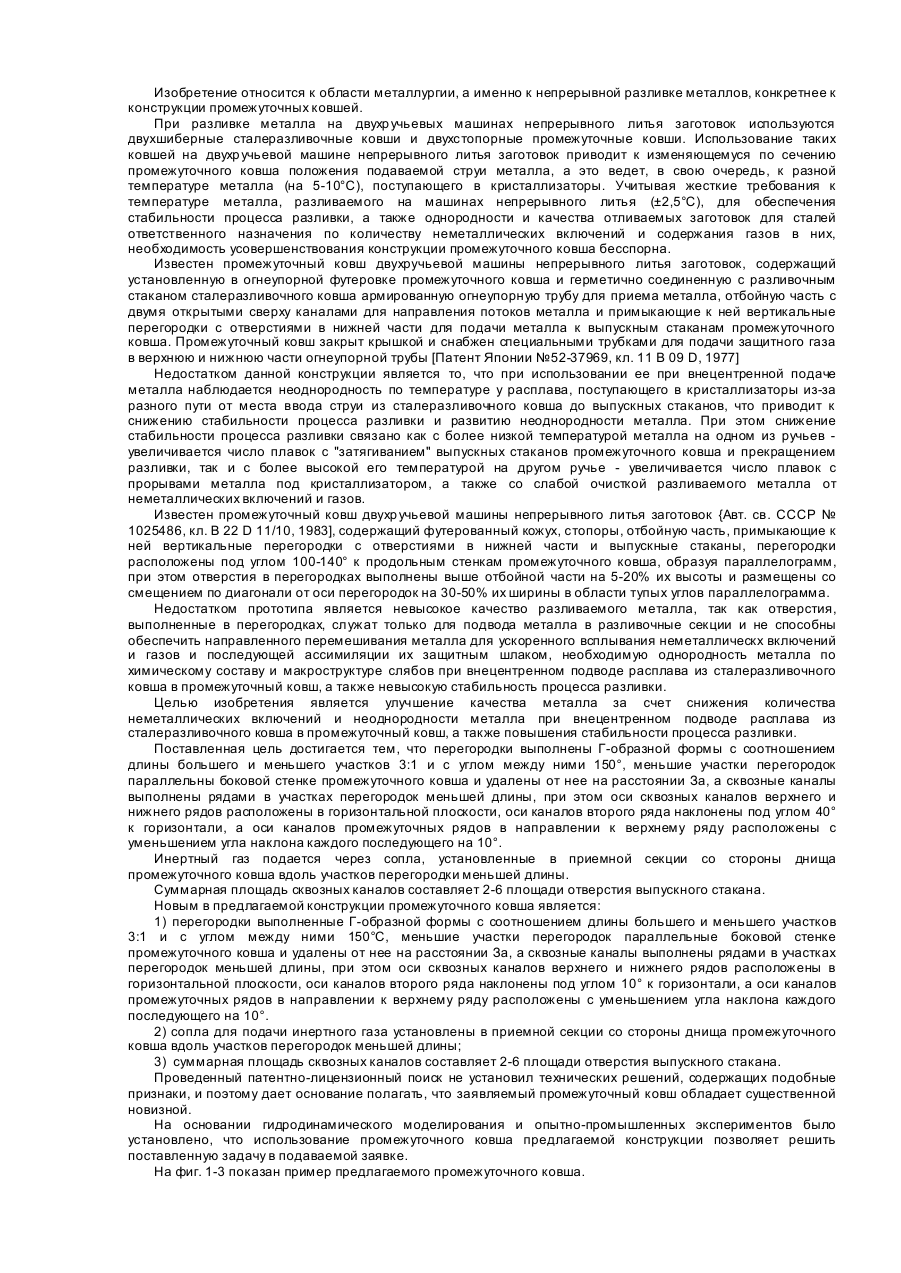
1. Промежуточный ковш двухручьевой машины непрерывного литья заготовок, со* держащий футерованный кожух с соплами для подачи газа, отбойную часть, приемную и разливочные секции с выпускными стаканами, удаленными от боковой стенки на расстоянии а, при этом секции разделены между собой перегородками с выполненными в них сквозными каналами, отличающийся тем, что перегородки выполнены Г-образной формы с соотношением длины большего и меньшего...
Спосіб охолоджування зливка в зоні вторинного охолоджування машини безперервного лиття заготовок (мблз)
Номер патенту: 14367
Опубліковано: 15.05.2006
Автори: Шишкін Володимир Вікторович, Лоза Олена Анатоліївна, Лоза Аркадій Васильович
МПК: B22D 11/00
Мітки: зливка, безперервного, вторинного, заготовок, машини, спосіб, мблз, охолоджування, зони, лиття
Формула / Реферат:
1. Спосіб охолоджування зливка в зоні вторинного охолоджування машини безперервного лиття заготовок (МБЛЗ), що включає подачу охолоджувача у вигляді водно-газової суміші, яка розпиляється на поверхню зливка під тиском, в проміжки між роликами МБЛЗ, який відрізняється тим, що як газову складову охолоджувача застосовують нейтральний газ або суміш нейтрального газу з повітрям.2. Спосіб за п. 1, який відрізняється тим, що як...
Попередній патент: М’ясні вироби з фукусами та соєвим борошном єсо
Наступний патент: Халва глазурована “домашнє свято”
Випадковий патент: Спосіб профілактики та лікування грибкових захворювань фінікової пальми