Механізм маневрування безкільового літального апарата
Формула / Реферат
Механізм маневрування безкільового літального апарата, який характеризується тим, що в своїй побудові має дві рухомі платформи, які мають між собою шліцьове зчеплення, причому до першої платформи циліндричної форми ззовні жорстко прикріплений двигун, а зсередини чотири паралельні штоки з'єднані з платформою шарнірно, на зовнішній бічній поверхні платформи знаходяться шліци, а до другої платформи зсередини по центру жорстко прикріплений шток, який має привід від робочого комплексу, а з протилежного боку являє собою порожнисту поверхню з шліцами для зчеплення з першою рухомою платформою, бічна площина якої являє собою шестірню, яка з'єднана з приводом, електродвигуном, з проміжною шестірнею.
Текст
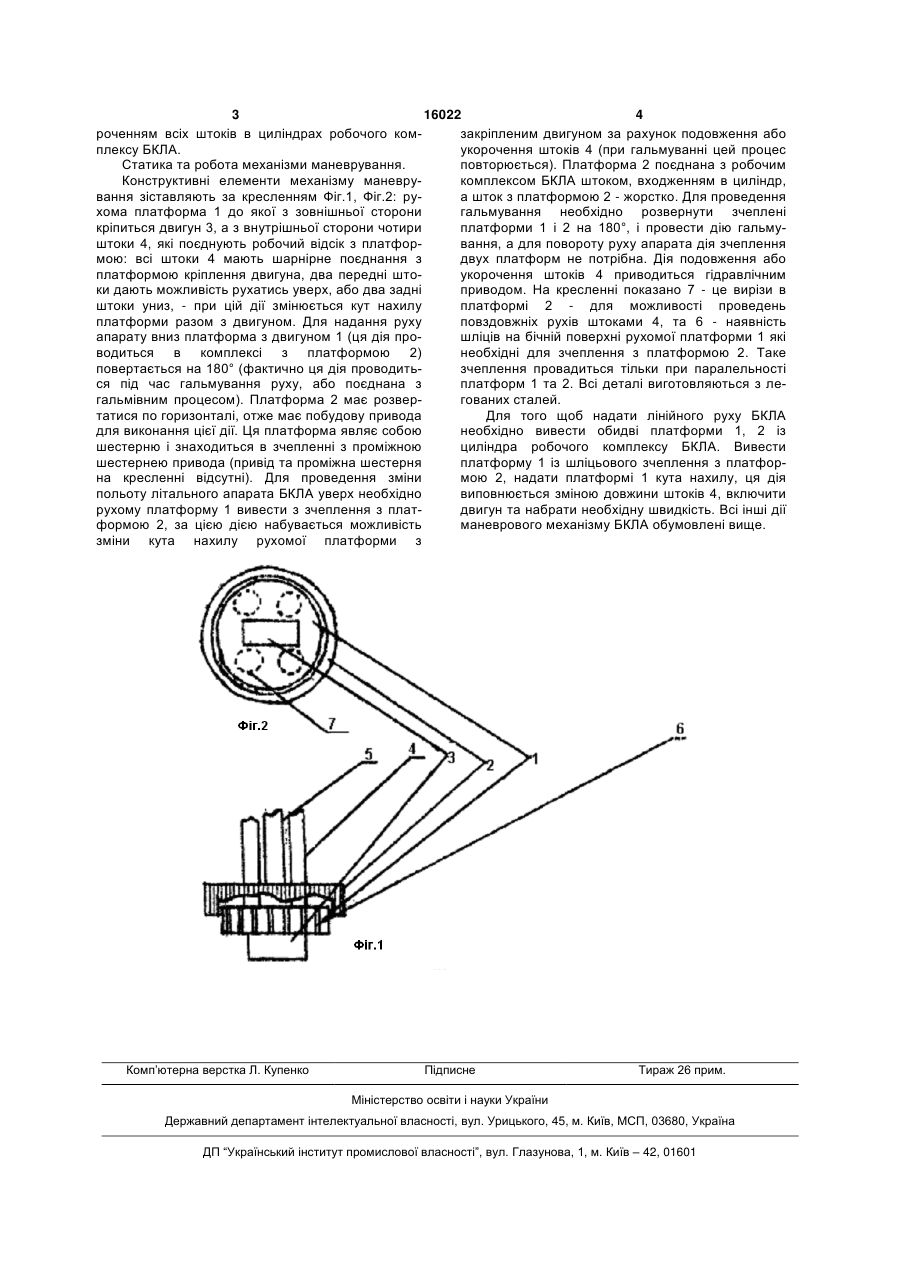
Механізм маневрування безкільового літального апарата, який характеризується тим, що в своїй побудові має дві рухомі платформи, які мають між собою шліцьове зчеплення, причому до першої платформи циліндричної форми ззовні 3 16022 4 роченням всіх штоків в циліндрах робочого комзакріпленим двигуном за рахунок подовження або плексу БКЛА. укорочення штоків 4 (при гальмуванні цей процес Статика та робота механізми маневрування. повторюється). Платформа 2 поєднана з робочим Конструктивні елементи механізму маневрукомплексом БКЛА штоком, входженням в циліндр, вання зіставляють за кресленням Фіг.1, Фіг.2: руа шток з платформою 2 - жорстко. Для проведення хома платформа 1 до якої з зовнішньої сторони гальмування необхідно розвернути зчеплені кріпиться двигун 3, а з внутрішньої сторони чотири платформи 1 і 2 на 180°, і провести дію гальмуштоки 4, які поєднують робочий відсік з платфорвання, а для повороту руху апарата дія зчеплення мою: всі штоки 4 мають шарнірне поєднання з двух платформ не потрібна. Дія подовження або платформою кріплення двигуна, два передні штоукорочення штоків 4 приводиться гідравлічним ки дають можливість рухатись уверх, або два задні приводом. На кресленні показано 7 - це вирізи в штоки униз, - при цій дії змінюється кут нахилу платформі 2 - для можливості проведень платформи разом з двигуном. Для надання руху повздовжніх рухів штоками 4, та 6 - наявність апарату вниз платформа з двигуном 1 (ця дія прошліців на бічній поверхні рухомої платформи 1 які водиться в комплексі з платформою 2) необхідні для зчеплення з платформою 2. Таке повертається на 180° (фактично ця дія проводитьзчеплення провадиться тільки при паралельності ся під час гальмування руху, або поєднана з платформ 1 та 2. Всі деталі виготовляються з легальмівним процесом). Платформа 2 має розвергованих сталей. татися по горизонталі, отже має побудову привода Для того щоб надати лінійного руху БКЛА для виконання цієї дії. Ця платформа являє собою необхідно вивести обидві платформи 1, 2 із шестерню і знаходиться в зчепленні з проміжною циліндра робочого комплексу БКЛА. Вивести шестернею привода (привід та проміжна шестерня платформу 1 із шліцьового зчеплення з платфорна кресленні відсутні). Для проведення зміни мою 2, надати платформі 1 кута нахилу, ця дія польоту літального апарата БКЛА уверх необхідно виповнюється зміною довжини штоків 4, включити рухому платформу 1 вивести з зчеплення з платдвигун та набрати необхідну швидкість. Всі інші дії формою 2, за цією дією набувається можливість маневрового механізму БКЛА обумовлені вище. зміни кута нахилу рухомої платформи з Комп’ютерна верстка Л. Купенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism of maneuvering of keelless aircraft
Автори англійськоюTsiurenko Valentyn Andriiovych
Назва патенту російськоюМеханизм маневрирования бескилевого летательного аппарата
Автори російськоюЦюренко Валентин Андреевич
МПК / Мітки
МПК: B64C 29/00, B64C 39/02
Мітки: механізм, літального, маневрування, апарата, безкільового
Код посилання
<a href="https://ua.patents.su/2-16022-mekhanizm-manevruvannya-bezkilovogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Механізм маневрування безкільового літального апарата</a>
Механізм вертикального зльоту та приземлення безкільового літального апарата
Номер патенту: 16051
Опубліковано: 17.07.2006
Автор: Цюренко Валентин Андрійович
МПК: B64C 39/02, B64C 29/00
Мітки: безкільового, приземлення, літального, механізм, зльоту, вертикального, апарата
Формула / Реферат:
Механізм вертикального зльоту і приземлення безкільового апарата, який характеризується тим, що містить рухому фланцеву платформу, яка з’єднана з робочим комплексом безкільового літального апарата чотирма штоками, які мають шарнірне з’єднання з платформою, а з робочим комплексом, через циліндри, з гідравлічним приводом, штоки розміщені на площині через 90°, а через кожні 45° від кожного штока розміщені по одному гвинту під кутом нахилу 45° до...
Бортовий комплекс літального апарата
Номер патенту: 2796
Опубліковано: 16.08.2004
Автори: Шкляр Володимир Петрович, Шервашидзе Володимир Варламович, Мурзаханов Олександр Валентинович, Самусь Андрій Ігорович
МПК: F42B 15/00, G01C 21/00
Мітки: літального, бортовий, апарата, комплекс
Формула / Реферат:
Бортовий комплекс літального апарата, стабілізованого за креном, який містить розміщені у корпусі літального апарата: кардановий підвіс, що складається з рамки та платформи із закріпленою на ній головкою самонаведення; датчики кутової швидкості обертання (ДКШ), осі чутливості яких у початковий момент часу є взаємно ортогональними та паралельними осям рамки карданового підвісу і платформи; інтегратори; датчики кутів (ДК); виконавчі приводи...
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата
Номер патенту: 74847
Опубліковано: 15.02.2006
Автор: Єрмоленко Іван Миколайович
Мітки: двигуна, згоряння, подачі, літального, апарата, камеру, компонентів, спосіб, палива
Формула / Реферат:
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата, що включає витіснення компонентів палива з паливних баків під дією газів, що подаються в паливні баки, який відрізняється тим, що гази подають у напрямку, тангенціальному до циліндричної бокової поверхні паливних баків.
Крило літального апарата
Номер патенту: 64342
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
Мітки: апарата, літального, крило
Формула / Реферат:
Крило літального апарата, що включає профіль, утворений верхньою і нижньою поверхнями, яке відрізняється тим, що профіль виконаний у вигляді клина, зміщеного від передньої кромки крила і який звужується до задньої кромки крила, а на нижній поверхні профілю по довжині крила закріплені аеродинамічні гребені.
Крило літального апарата
Номер патенту: 11279
Опубліковано: 15.12.2005
Автори: Казакевіч Андрей В'ячеслав, Казакевіч Аліна Вячеслав, Чорний Анатолій Петрович
МПК: B64C 3/00
Мітки: апарата, крило, літального
Формула / Реферат:
1. Крило літального апарата, що має внутрішній силовий набір, яке відрізняється тим, що його вільний кінець додатково оснащують відрізком крила, яке розташовують площиною у напрямку руху літального апарата перпендикулярно площині крила і всмоктувальною поверхнею профілю назовні.2. Крило за п. 1, яке відрізняється тим, що відрізок крила виконують з таким профілем всмоктувальної поверхні і розташовують його під таким кутом атаки до...
Попередній патент: Спосіб визначення придатності до льотної роботи в цивільній авіації україни льотного складу з неврологічною патологією
Наступний патент: Спосіб заряджання свердловин емульсійною вибуховою речовиною
Випадковий патент: Кришка для безпечної дегазації