Спосіб автоматичного управління рухом транспортного засобу
Номер патенту: 13290
Опубліковано: 28.02.1997
Автори: Павлюк Дмитро Олександрович, Кизима Станіслав Степанович

Формула / Реферат
(57) Способ автоматического управления движением транспортного средства, основанный на определении текущего значения ускорения транспортного средства и формировании управляющего воздействия на органы, связанные с движущим или тормозным приводом, отличающийся тем, что формируют соответствующий текущему значению ускорения транспортного средства сигнал динамической перегрузки, по значению которого осуществляют формирование управляющего воздействия на органы, связанные с движущим или тормозным приводом.
Текст
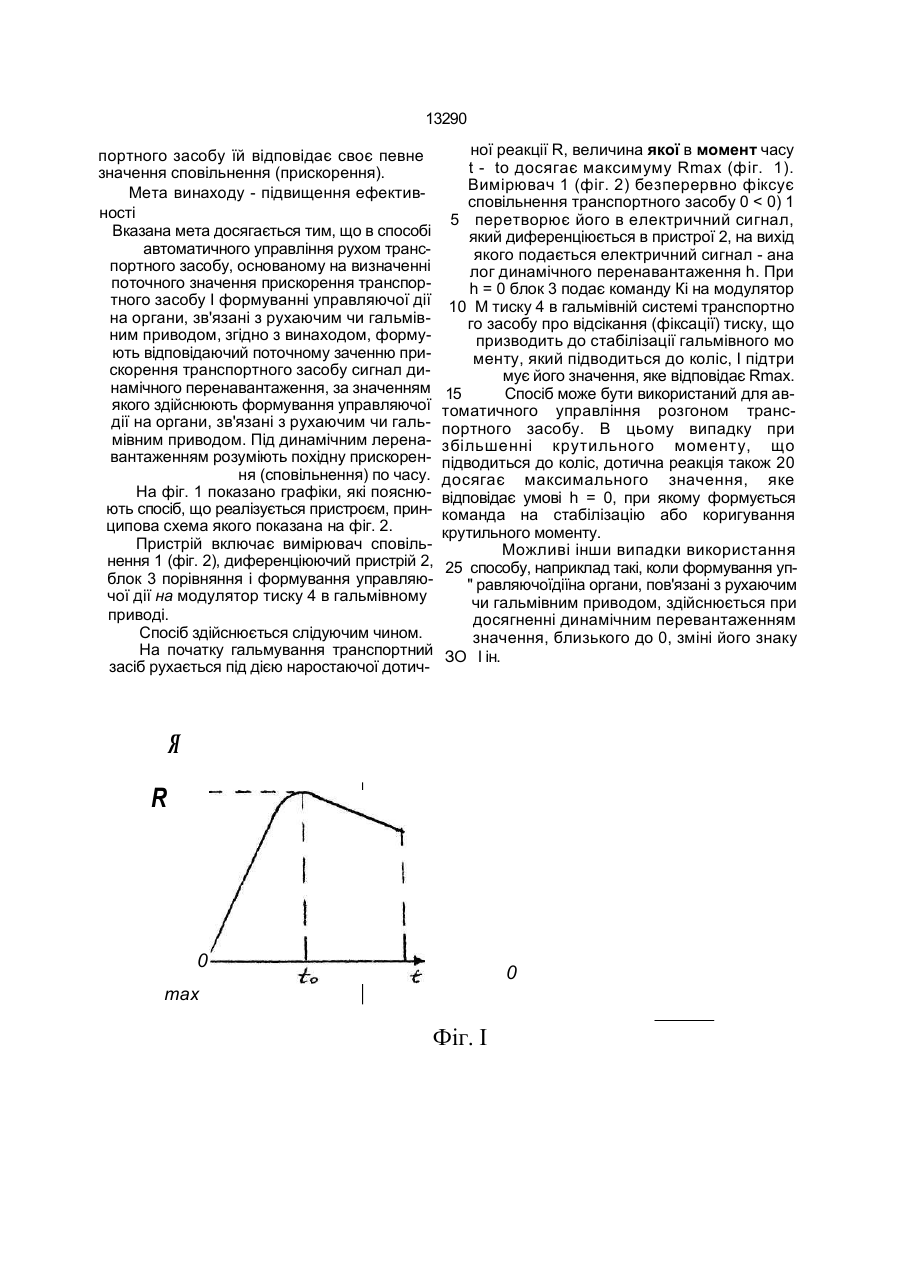
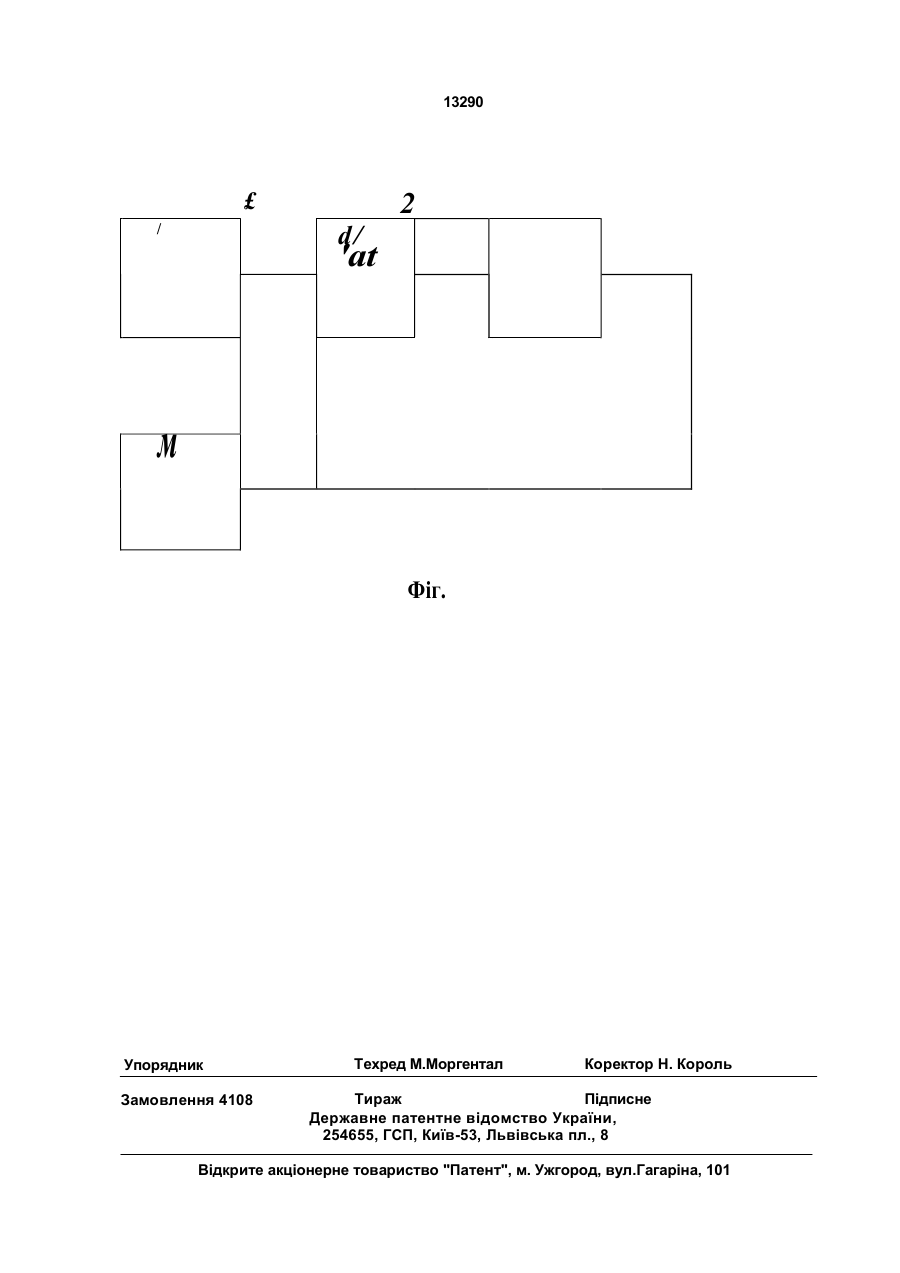
УКРАЇ НА а*ЦА Ьд. забезпечують розгальмування гальмуючих коліс з метою недопускання їх блокування і ковзання по опорній поверхні, при якому величина дотичної реакції зменшується в (73) Павлюк Дмитро Олександрович (UA). Кизима Станіслав Степанович (UA) (57) Способ автоматического управления движением транспортного средства, основанный на определении текущего значения ускорения транспортного средства и формировании управляющего воздействия на органы, связанные с движущим или тормозным приводом, о т л и ч а ю щ и й с я тем, что формируют соответствующий текущему значению ускорения транспортного средства сигнал динамической перегрузки, по значению которого осуществляют формирование управляющего воздействия на органы, связанные с движущим или тормозным приводом. порівнянні з випадком, коли колеса не ковзають. Вказаний спосіб може бути застосований для управління розгоном транспортного засобу при використанні його в протибуксовочній системі [3], яка для покращення розгону автомобіля передбачає регулювання крутильного моменту, що передається на ведуче колесо, тільки в тому випадку, якщо прискорення автомобіля нижче заданного значення. Недоліком вказаного способу є низька ефективність, зумовлена тим. що використання постійної, наперед заданої величини прискорення (сповільнення) не дозволяє у всіх випадках експлуатації забезпечити максимальну силу зчеплення коліс з опорною поверхнею, величина яко» визначається зчіпними якостями поверхні та її станом і в кожному конкретному випадку руху транс С > со чО о о 13290 портного засобу їй відповідає своє певне значення сповільнення (прискорення). Мета винаходу - підвищення ефективності Вказана мета досягається тим, що в способі автоматичного управління рухом транспортного засобу, основаному на визначенні поточного значення прискорення транспортного засобу І формуванні управляючої дії на органи, зв'язані з рухаючим чи гальмівним приводом, згідно з винаходом, формують відповідаючий поточному заченню прискорення транспортного засобу сигнал динамічного перенавантаження, за значенням якого здійснюють формування управляючої дії на органи, зв'язані з рухаючим чи гальмівним приводом. Під динамічним леренавантаженням розуміють похідну прискорення (сповільнення) по часу. На фіг. 1 показано графіки, які пояснюють спосіб, що реалізується пристроєм, принципова схема якого показана на фіг. 2. Пристрій включає вимірювач сповільнення 1 (фіг. 2), диференціюючий пристрій 2, блок 3 порівняння і формування управляючої дії на модулятор тиску 4 в гальмівному приводі. Спосіб здійснюється слідуючим чином. На початку гальмування транспортний засіб рухається під дією наростаючої дотич ної реакції R, величина якої в момент часу t - to досягає максимуму Rmax (фіг. 1). Вимірювач 1 (фіг. 2) безперервно фіксує сповільнення транспортного засобу 0 < 0) 1 5 перетворює його в електричний сигнал, який диференціюється в пристрої 2, на вихід якого подається електричний сигнал - ана лог динамічного перенавантаження h. При h = 0 блок 3 подає команду Кі на модулятор 10 М тиску 4 в гальмівній системі транспортно го засобу про відсікання (фіксації) тиску, що призводить до стабілізації гальмівного мо менту, який підводиться до коліс, І підтри мує його значення, яке відповідає Rmax. 15 Спосіб може бути використаний для автоматичного управління розгоном транспортного засобу. В цьому випадку при збільшенні крутильного моменту, що підводиться до коліс, дотична реакція також 20 досягає максимального значення, яке відповідає умові h = 0, при якому формується команда на стабілізацію або коригування крутильного моменту. Можливі інши випадки використання 25 способу, наприклад такі, коли формування уп" равляючоїдіїна органи, пов'язані з рухаючим чи гальмівним приводом, здійснюється при досягненні динамічним перевантаженням значення, близького до 0, зміні його знаку ЗО І ін. Я R 0 0 max Фіг. І 13290 £ / 2 d/ 'at м Фіг. Упорядник Замовлення 4108 Техред М.Моргентал Коректор Н. Король Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of automatic control of movement of transport vehicle
Автори англійськоюPavliuk Dmytro Oleksandrovych, Kyzyma Stanislav Stepanovych
Назва патенту російськоюСпособ автоматического управления движением транспортного средства
Автори російськоюПавлюк Дмитрий Александрович, Кизима Станислав Степанович
МПК / Мітки
МПК: B60T 8/72, G08G 1/052
Мітки: засобу, транспортного, спосіб, управління, рухом, автоматичного
Код посилання
<a href="https://ua.patents.su/4-13290-sposib-avtomatichnogo-upravlinnya-rukhom-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного управління рухом транспортного засобу</a>
Спосіб управління електропневматичним гальмом залізничного транспортного засобу
Номер патенту: 7221
Опубліковано: 30.06.1995
Автори: Козюлін Лев Васільєвіч, Іноземцев Владімір Грігорьєвіч
МПК: B60T 13/68
Мітки: спосіб, електропневматичним, залізничного, гальмом, засобу, транспортного, управління
Формула / Реферат:
Способ управления электропневматическим тормозом железнодорожного транспортного средства, заключающийся в формировании управляющего пневматического сигнала, подаче его на управляющие входы пневматических воздухораспределительных органов, преобразующих управляющий пневматический сигнал в исполнительные пневматические сигналы, контроле уровня управляющего пневматического сигнала и формировании электрического управляющего сигнала на...
Пристрій управління гальмом залізничного транспортного засобу
Номер патенту: 5333
Опубліковано: 28.12.1994
Автори: Козюлін Лев Васільовіч, Беляков Ніколай Івановіч, Перов Ніколай Ніколайовіч, Смелов Владімір Ніколаєвіч
МПК: B60T 7/12, B60T 15/04
Мітки: гальмом, залізничного, транспортного, пристрій, управління, засобу
Формула / Реферат:
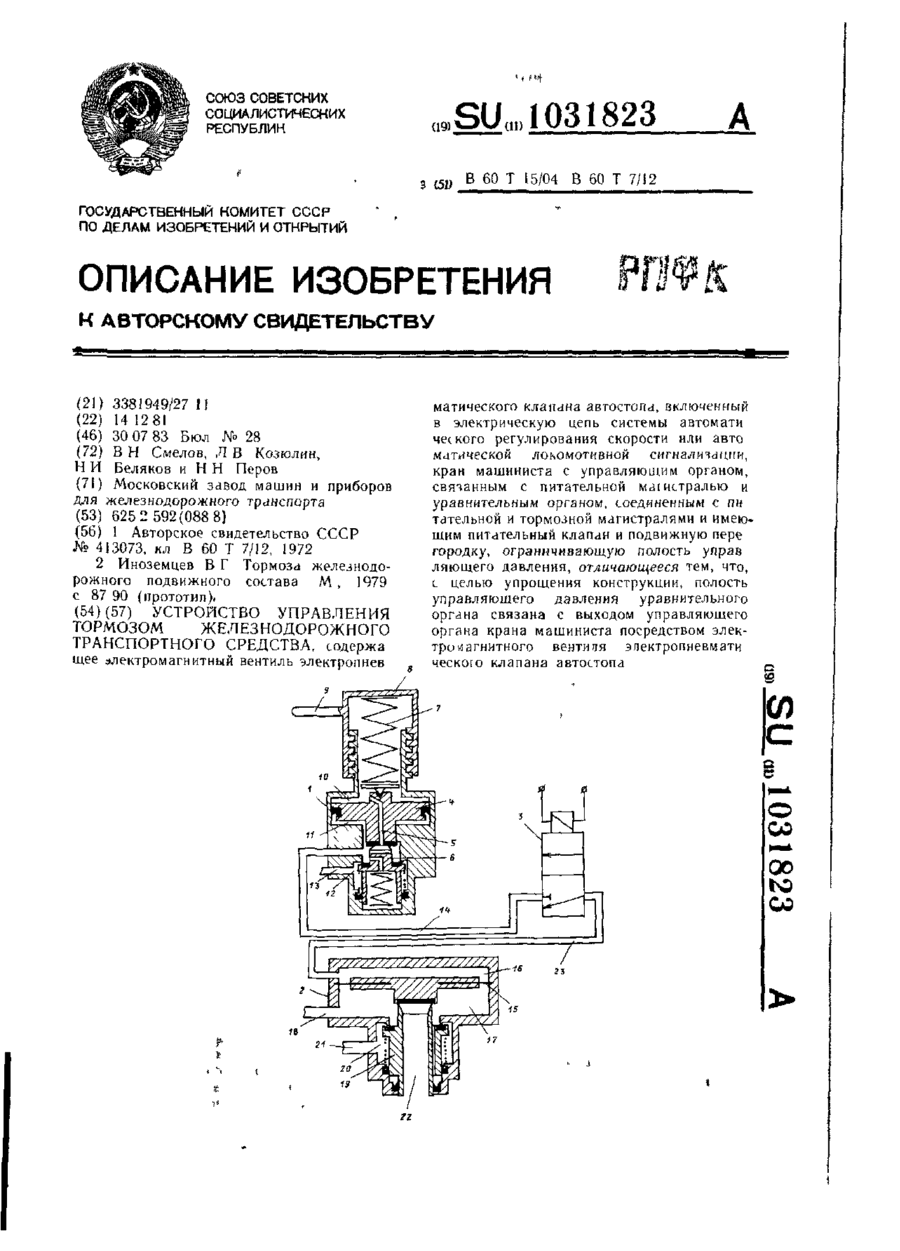
Устройство управления тормозом железнодорожного транспортного средства, содержащее электромагнитный вентиль электропневматического клапана автостопа, включенный в электрическую цепь системы автоматического регулирования скорости или автоматической локомотивной сигнализации, кран машиниста с управляющим органом, связанным с питательной магистралью и уравнительным органом, соединенным с питательной и тормозной магистралями и имеющими...
Обладнання управління двигуном транспортного засобу
Номер патенту: 11745
Опубліковано: 25.12.1996
Автори: Каменев Василь Ніонілович, Кальченко Борис Іванович, Лінчевський Віктор Володимирович, Ілющенко Микола Васильович
МПК: B60K 26/00
Мітки: обладнання, двигуном, управління, транспортного, засобу
Формула / Реферат:
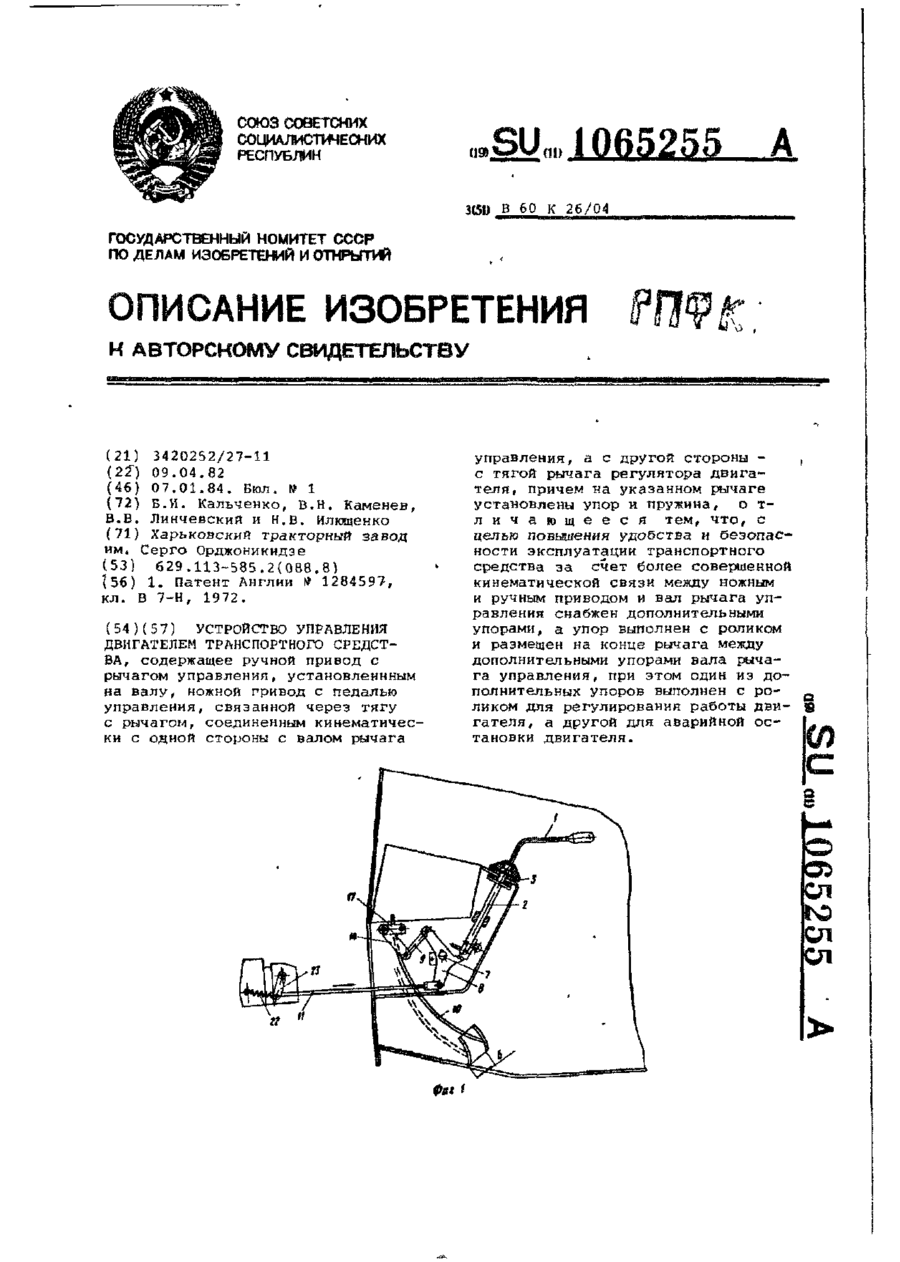
Устройство управлення двигателем транспортного средства, содержащее ручной привод с рычагом управления, установленным на валу, ножной привод с педалью управления, связанной через тягу с рычагом, соединенным кинематически с одной стороны с валом рычага управления, а с другой стороны - с тягой рычага регулятора двигателя, причем на указанном рычаге установлены упор и пружина, отличающееся тем, что с целью повышения удобства и безопасности...
Система управління фрікційними гідромуфтами двохпоточної коробки передач транспортного засобу
Номер патенту: 11824
Опубліковано: 25.12.1996
Автори: Ілющенко Микола Васильович, Каменев Василь Ніонілович
МПК: B60W 10/10
Мітки: транспортного, фрікційними, коробки, гідромуфтами, двохпоточної, передач, управління, засобу, система
Формула / Реферат:
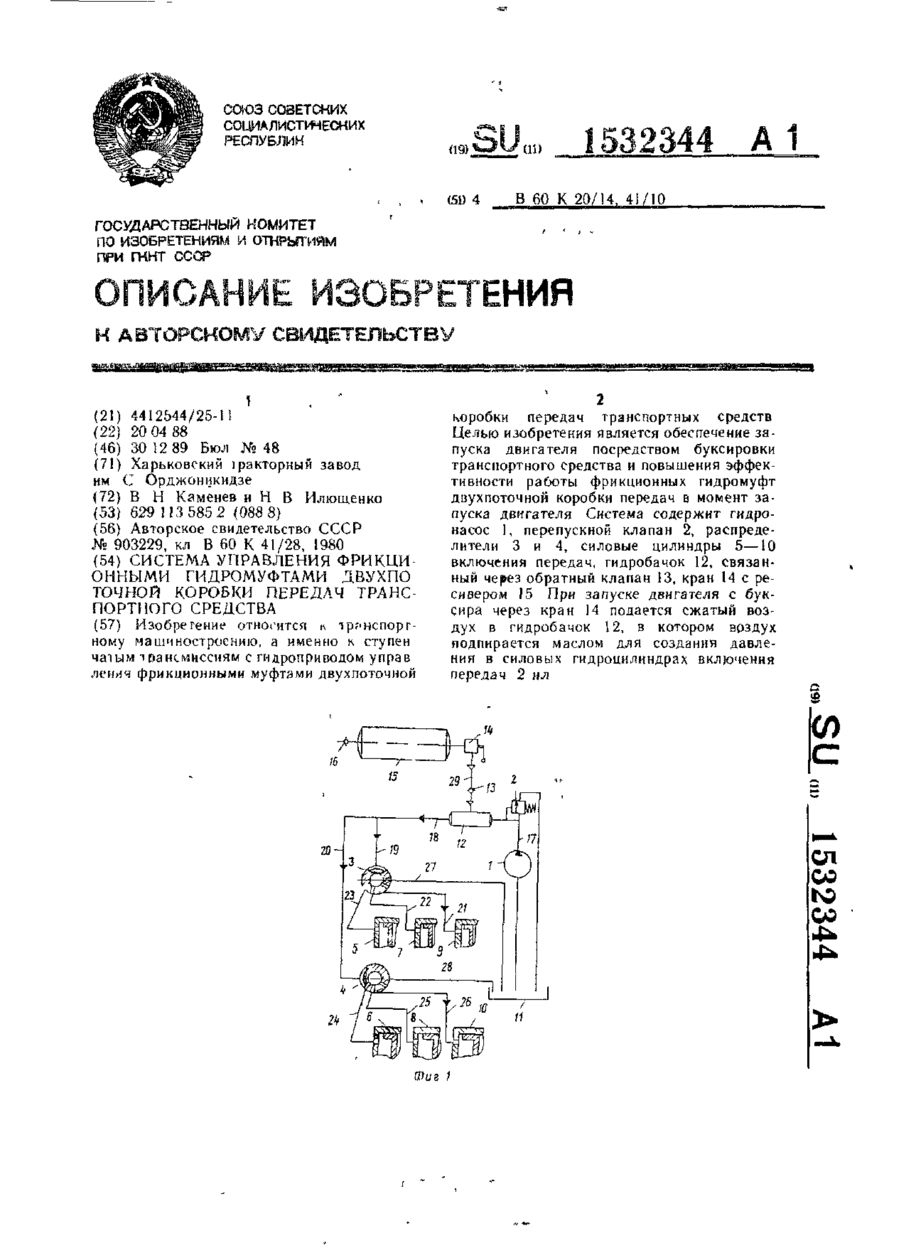
Система управлення фрикционными гидромуфтами двухпоточпой коробки передач транспортного средства, содержащая гидронасос, соединенный через перепускной клапан и гидрораспределители магистралями с силовыми гидроцилиндрами фрикционных гидромуфт коробки передач, обратный клапан, сообщенный через пневмораспределитель с ресивером пневмосистемы, отличающаяся тем, что, с целью обеспечения запуска двигателя путем буксировки транспортного средства...
Пристрій управління гальмом транспортного засобу
Номер патенту: 7070
Опубліковано: 31.03.1995
Автор: Каменев Василь Ніонілович
МПК: B60T 7/00
Мітки: транспортного, засобу, пристрій, управління, гальмом
Формула / Реферат:
(57) Устройство управления тормозом транспортного средства, содержащее рычаг педали, установленный на оси в кронштейне с возможностью поворота, зубчатый элемент, выполненный на рычаге педали, собачку фиксации рычага педали и механизм ее привода, снабженный рукояткой, отличающееся тем, что головка собачки выполнена на рукоятке механизма привода, при этом устройство снабжено пружиной с V-образными концами, охватывающей с двух сторон головку...
Попередній патент: Іскрогасник
Наступний патент: Спосіб відбору сировини для одержання антилептоспірозної плазми
Випадковий патент: Установка для подрібнення і змішування корму