Спосіб регулювання динамічного моменту інерції маховика
Номер патенту: 38650
Опубліковано: 12.01.2009
Автори: Стрілець Володимир Миколайович, Ріло Ілля Павлович, Марчук Микола Михайлович, Марчук Роман Миколайович, Стрілець Олег Романович
Формула / Реферат
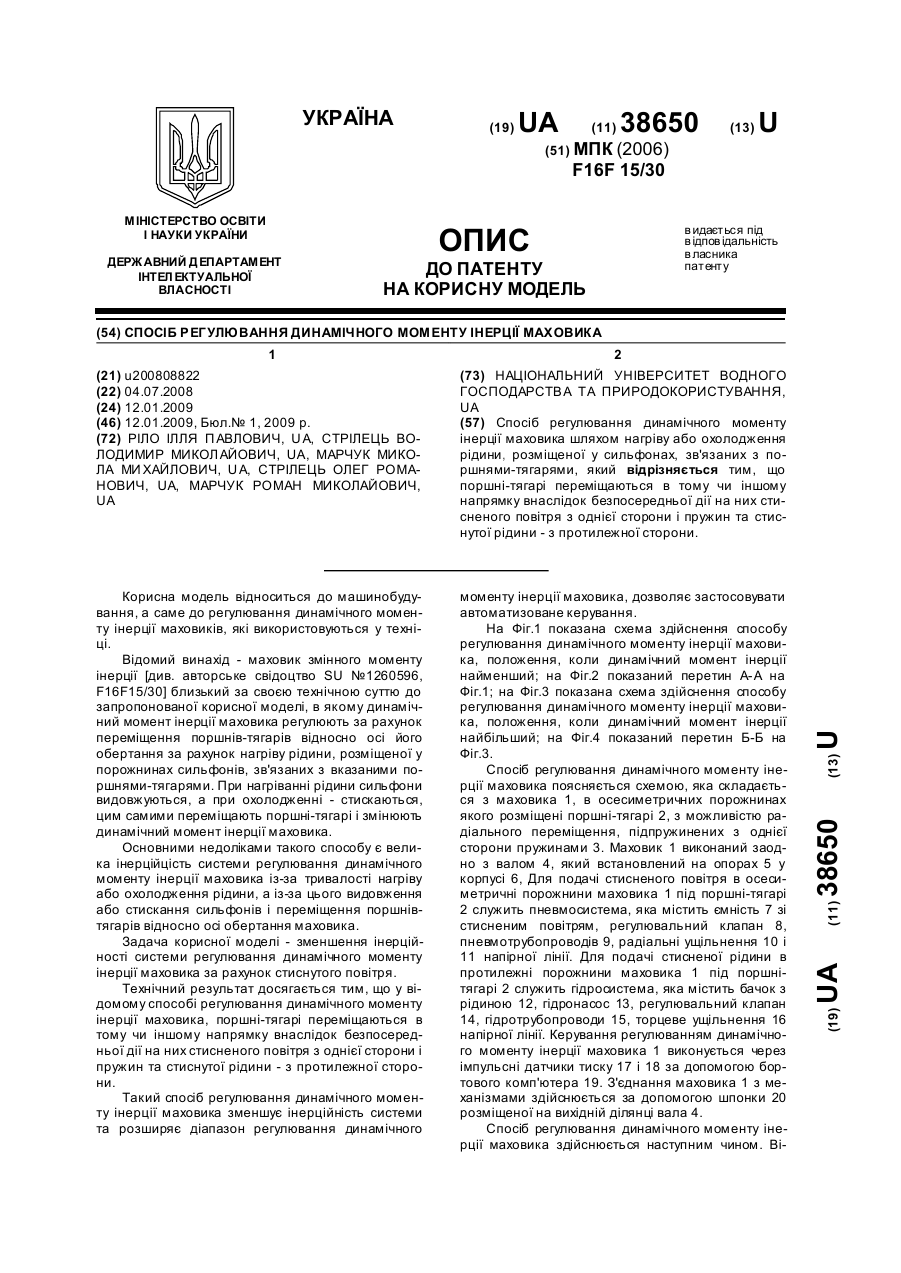
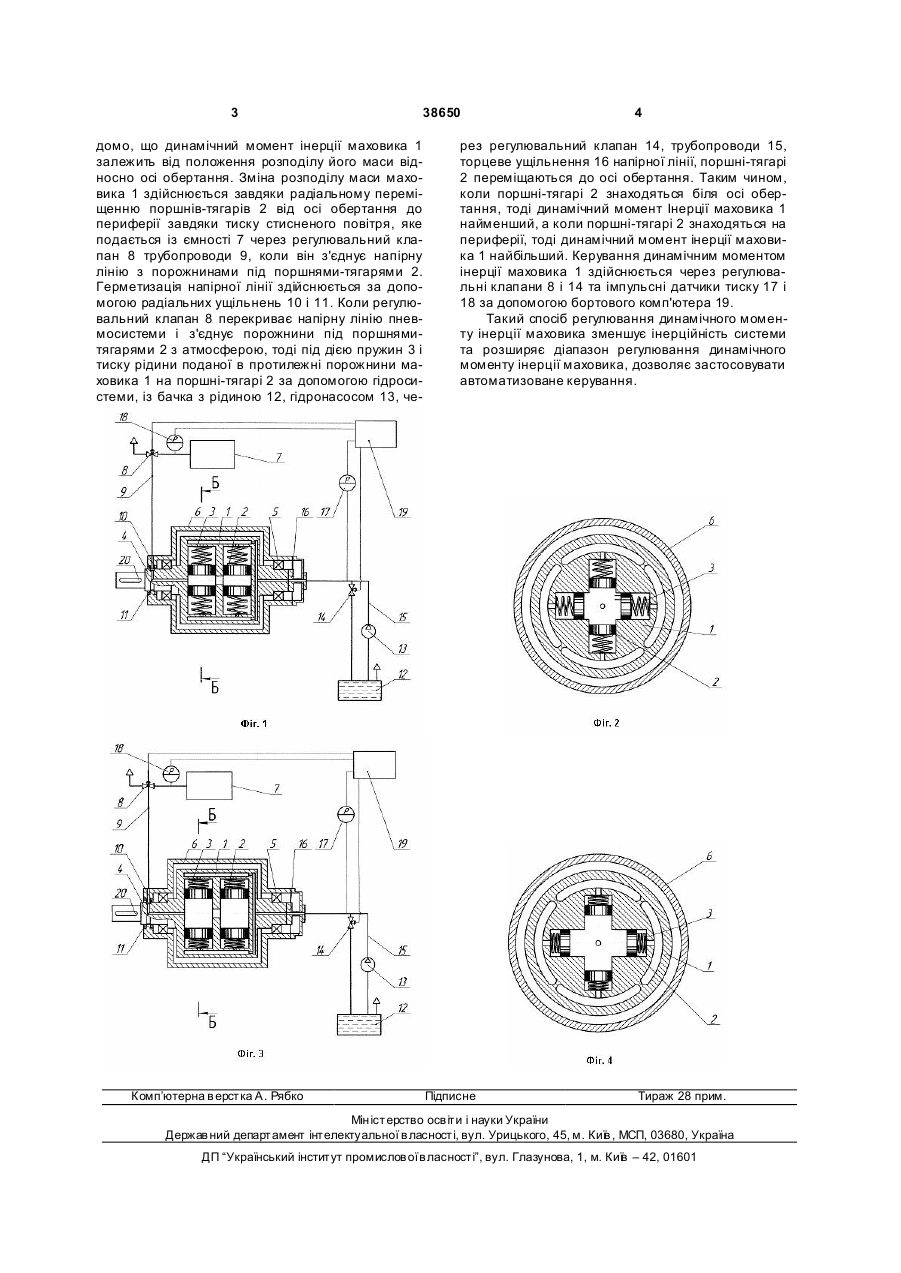
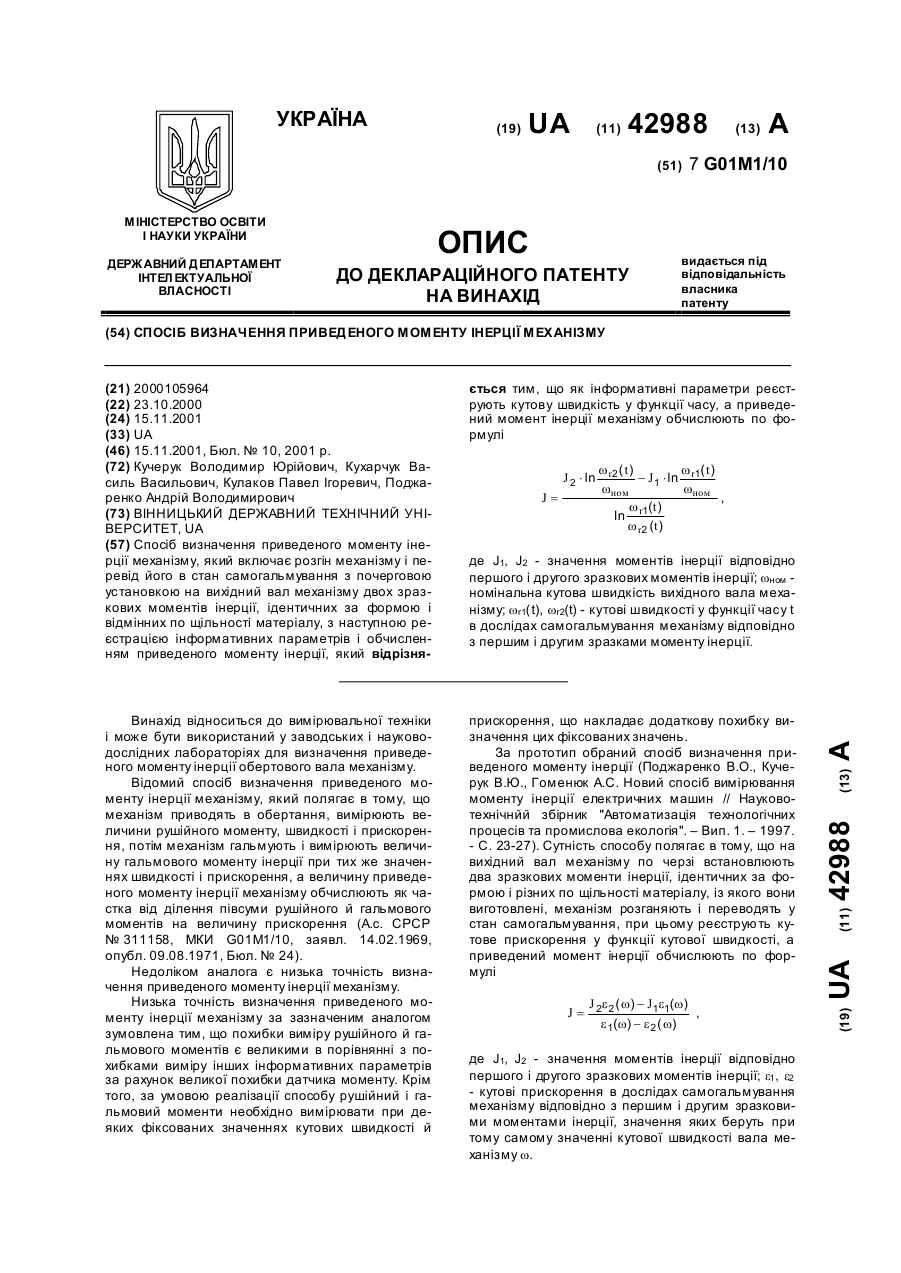
Спосіб регулювання динамічного моменту інерції маховика шляхом нагріву або охолодження рідини, розміщеної у сильфонах, зв'язаних з поршнями-тягарями, який відрізняється тим, що поршні-тягарі переміщаються в тому чи іншому напрямку внаслідок безпосередньої дії на них стисненого повітря з однієї сторони і пружин та стиснутої рідини - з протилежної сторони.
Текст
Спосіб регулювання динамічного моменту інерції маховика шляхом нагріву або охолодження рідини, розміщеної у сильфонах, зв'язаних з поршнями-тягарями, який відрізняється тим, що поршні-тягарі переміщаються в тому чи іншому напрямку внаслідок безпосередньої дії на них стисненого повітря з однієї сторони і пружин та стиснутої рідини - з протилежної сторони. (19) (21) u200808822 (22) 04.07.2008 (24) 12.01.2009 (46) 12.01.2009, Бюл.№ 1, 2009 р. (72) РІЛО ІЛЛЯ П АВЛОВИЧ, U A, СТРІЛЕЦЬ ВОЛОДИМИР МИКОЛАЙОВИЧ, UA, МАРЧУК МИКОЛА МИ ХАЙЛОВИЧ, U A, СТРІЛЕЦЬ ОЛЕГ РОМАНОВИЧ, UA, МАРЧУК РОМАН МИКОЛАЙОВИЧ, UA 3 38650 домо, що динамічний момент інерції маховика 1 залежить від положення розподілу його маси відносно осі обертання. Зміна розподілу маси маховика 1 здійснюється завдяки радіальному переміщенню поршнів-тягарів 2 від осі обертання до периферії завдяки тиску стисненого повітря, яке подається із ємності 7 через регулювальний клапан 8 трубопроводи 9, коли він з'єднує напірну лінію з порожнинами під поршнями-тягарями 2. Герметизація напірної лінії здійснюється за допомогою радіальних ущільнень 10 і 11. Коли регулювальний клапан 8 перекриває напірну лінію пневмосистеми і з'єднує порожнини під поршнямитягарями 2 з атмосферою, тоді під дією пружин 3 і тиску рідини поданої в протилежні порожнини маховика 1 на поршні-тягарі 2 за допомогою гідросистеми, із бачка з рідиною 12, гідронасосом 13, че Комп’ютерна в ерстка А. Рябко 4 рез регулювальний клапан 14, трубопроводи 15, торцеве ущільнення 16 напірної лінії, поршні-тягарі 2 переміщаються до осі обертання. Таким чином, коли поршні-тягарі 2 знаходяться біля осі обертання, тоді динамічний момент Інерції маховика 1 найменший, а коли поршні-тягарі 2 знаходяться на периферії, тоді динамічний момент інерції маховика 1 найбільший. Керування динамічним моментом інерції маховика 1 здійснюється через регулювальні клапани 8 і 14 та імпульсні датчики тиску 17 і 18 за допомогою бортового комп'ютера 19. Такий спосіб регулювання динамічного моменту інерції маховика зменшує інерційність системи та розширяє діапазон регулювання динамічного моменту інерції маховика, дозволяє застосовувати автоматизоване керування. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of dynamical torque of flywheel
Автори англійськоюRilo Illia Pavlovych, Strilets Volodymyr Mykolaiovych, Marchuk Mykola Mykhailovych, Strilets Oleh Romanovych, Marchuk Roman Mykolaiovych
Назва патенту російськоюСпособ регулировки динамического момента инерции маховика
Автори російськоюРило Илья Павлович, Стрилец Владимир Николаевич, Марчук Николай Михайлович, Стрилец Олег Романович, Марчук Роман Николаевич
МПК / Мітки
МПК: F16F 15/30
Мітки: динамічного, регулювання, маховика, інерції, моменту, спосіб
Код посилання
<a href="https://ua.patents.su/2-38650-sposib-regulyuvannya-dinamichnogo-momentu-inerci-makhovika.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання динамічного моменту інерції маховика</a>
Маховик перемінного моменту інерції

Номер патенту: 31186
Опубліковано: 15.12.2000
Автори: Овсієнко Лариса Григорівна, Тарасов Юрій Михайлович, Бондарєв Валентин Степанович, Бондарєв Сергій Валентинович
МПК: F16F 15/30
Мітки: інерції, моменту, перемінного, маховик
Текст:
...аксіально рортзхора нї каналів S. Кгрпус і маховика гакріплений на валу 3 машини. Висота лопаток £ та 6 з одного торца, яка дорівнює h, більше висоти лопаток 3 та 7 а другого торца, яка дорівнює h f t як Ї/. ІНІМ ^ТЙ г" гва рагі;, отж^ h >= 2h^. Б порсжнині маховика анахо Маховик перемінного моменту інерції npsnrce т=:-с:м При пуск/ машини ибзргакгзїй момент від SSLT/ ЧІІНСИ. 9 перелаемся корпусу і маховика, який починає...
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Кулаков Павел Ігоревич, Кухарчук Василь Васильович, Поджаренко Андрій Володимирович, Кучерук Володимир Юрійович
МПК: G01M 1/10
Мітки: моменту, приведеного, визначення, інерції, механізму, спосіб
Формула / Реферат:
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Спосіб вимірювання моменту інерції ротора електричних машин

Номер патенту: 27658
Опубліковано: 12.11.2007
Автори: Ведміцький Юрій Григорович, Кухарчук Василь Васильович
МПК: G01L 3/10
Мітки: електричних, спосіб, ротора, моменту, вимірювання, інерції, машин
Формула / Реферат:
Спосіб вимірювання моменту інерції ротора електричних машин шляхом вимірювань в режимі самогальмування з зразковим моментом інерції та без нього, який відрізняється тим, що вимірюють проміжки часу з моменту знеструмлення електромеханічної системи до моменту досягнення ротором заздалегідь заданої кутової швидкості, за результатами часових вимірювань знаходять значення моменту інерції ротора об'єкта вимірювання за формулою:
Спосіб визначення моменту інерції ротора асинхронноі машини
Номер патенту: 31973
Опубліковано: 15.12.2000
Автори: Кухарчук Василь Васильович, Козловський Андрій Володимирович
МПК: G01L 3/00
Мітки: інерції, машини, моменту, визначення, асинхронноі, ротора, спосіб
Текст:
...ротора. На фіг. 1 представлено графічне зображення перехідних процесів у перетворювачі без урахування перехідних процесів у ОВ та з урахуванням цих перехідних процесів, на фіг. 2 зображено схему пристрою для реалізації способу, на фіг. З зображено алгоритм виконання способу, на фіг. 4 зображені часові діаграми роботи процесорного засобу вимірювання моменту інерції. Пристрій, який дозволяє реалізувати запропонований спосіб визначення пускового...
Спосіб визначення моменту інерції ротора
Номер патенту: 29304
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
МПК: G01M 1/10
Мітки: визначення, моменту, інерції, спосіб, ротора
Формула / Реферат:
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості, критичної...