Різцетримач
Номер патенту: 4186
Опубліковано: 17.01.2005
Автори: Шевченко Олександр Віталійович, Шевченко Дмитро Олександрович, Ріпка Віталій Анатолійович
Формула / Реферат
Різцетримач, що містить корпус, віджимну частину з різцем, що зв'язана з корпусом пружними елементами та є повзуном на пружних напрямних, та привід її переміщення, що включає встановлений в корпусі з можливістю осьового переміщення штовхач, диференціальний гвинт, зв’язаний різьбами із штовхачем та корпусом, який відрізняється тим, що привід оснащений кривошипно-повзунним механізмом з віссю напрямної, що не проходить через вісь повороту кривошипа, та включає шатун і двоплечий кривошип, зв’язаний більшим плечем із штовхачем, а меншим через шатун - із повзуном на пружних напрямних.
Текст
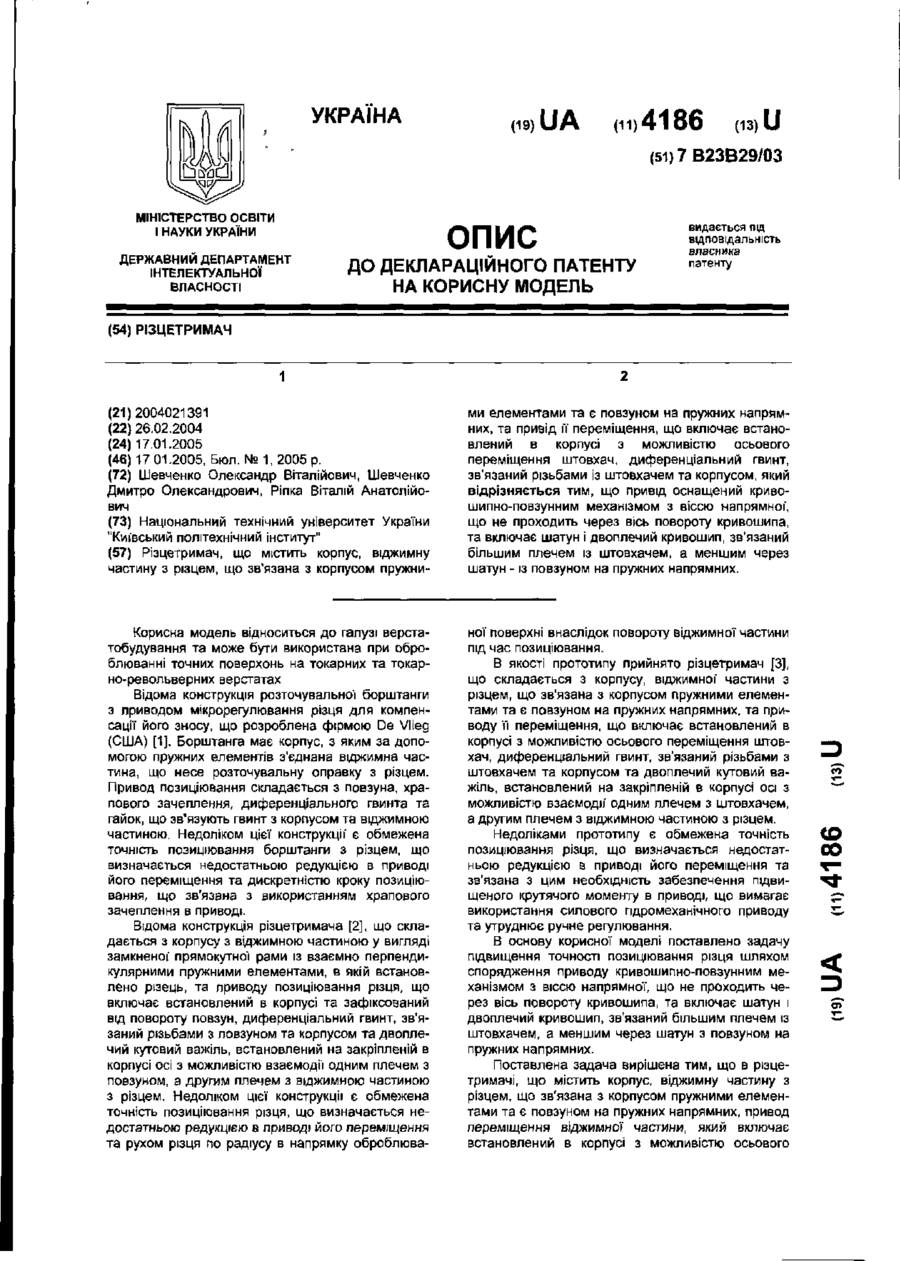
Різцетримач, що містить корпус, віджимну частину з різцем, що зв'язана з корпусом пружни ми елементами та є повзуном на пружних напрямних, та привід її переміщення, що включає встановлений в корпусі з можливістю осьового переміщення штовхач, диференціальний гвинт, зв'язаний різьбами із штовхачем та корпусом, який відрізняється тим, що привід оснащений кривошипно-повзунним механізмом з віссю напрямної, що не проходить через вісь повороту кривошипа, та включає шатун і двоплечий кривошип, зв'язаний більшим плечем із штовхачем, а меншим через шатун - із повзуном на пружних напрямних. Корисна модель відноситься до галузі верстатобудування та може бути використана при оброблюванні точних поверхонь на токарних та токарно-револьверних верстатах Відома конструкція розточувальної борштанги з приводом мікрорегулювання різця для компенсації його зносу, що розроблена фірмою De Vlieg (США) [1]. Борштанга має корпус, з яким за допомогою пружних елементів з'єднана віджимна частина, що несе розточувальну оправку з різцем. Привод позиціювання складається з повзуна, храпового зачеплення, диференціального гвинта та гайок, що зв'язують гвинт з корпусом та віджимною частиною. Недоліком цієї конструкції' є обмежена точність позиціювання борштанги з різцем, що визначається недостатньою редукцією в приводі його переміщення та дискретністю кроку позиціювання, що зв'язана з використанням храпового зачеплення в приводі. ної поверхні внаслідок повороту віджимної частини під час позиціювання. В якості прототипу прийнято різцетримач [3], що складається з корпусу, віджимної' частини з різцем, що зв'язана з корпусом пружними елементами та є повзуном на пружних напрямних, та приводу її переміщення, що включає встановлений в корпусі з можливістю осьового переміщення штовхач, диференціальний гвинт, зв'язаний різьбами з штовхачем та корпусом та двоплечий кутовий важіль, встановлений на закріпленій в корпусі осі з можливістю взаємодії" одним плечем з штовхачем, а другим плечем з віджимною частиною з різцем. Відома конструкція різцетримача [2], що складається з корпусу з віджимною частиною у вигляді замкненої' прямокутної рами із взаємно перпендикулярними пружними елементами, в якій встановлено різець, та приводу позиціювання різця, що включає встановлений в корпусі та зафіксований від повороту повзун, диференціальний гвинт, зв'язаний різьбами з повзуном та корпусом та двоплечий кутовий важіль, встановлений на закріпленій в корпусі осі з можливістю взаємодії одним плечем з повзуном, а другим плечем з віджимною частиною з різцем, Недоліком цієї конструкції є обмежена точність позиціювання різця, що визначається недостатньою редукцією в приводі його переміщення та рухом різця по радіусу в напрямку оброблюва Недоліками прототипу є обмежена точність позиціювання різця, що визначається недостатньою редукцією в приводі його переміщення та зв'язана з цим необхідність забезпечення підвищеного крутячого моменту в приводі, що вимагає використання силового гідромеханічного приводу та утруднює ручне регулювання. В основу корисної моделі поставлено задачу підвищення точності позиціювання різця шляхом спорядження приводу кривошипно-повзунним механізмом з віссю напрямної, що не проходить через вісь повороту кривошипа, та включає шатун і двоплечий кривошип, зв'язаний більшим плечем із штовхачем, а меншим через шатун з повзуном на пружних напрямних. Поставлена задача вирішена тим, що в різцетримачі, що містить корпус, віджимну частину з різцем, що зв'язана з корпусом пружними елементами та є повзуном на пружних напрямних, привод переміщення віджимної частини, який включає встановлений в корпусі з можливістю осьового (О 00 4186 переміщення штовхач, диференціальний гвинт, зв'язаний різьбами із штовхачем та корпусом, новим є те, що привод споряджено кривошипноповзунним механізмом з віссю напрямної', що не проходить через вісь повороту кривошипа, та включає шатун і двоплечий кривошип, зв'язаний більшим плечем із штовхачем, а меншим через шатун із повзуном на пружних напрямних. Внаслідок спорядження приводу кривошипноповзунним механізмом з віссю напрямної, що не проходить через вісь повороту кривошипа, осьове переміщення штовхача від диференціального гвинта спричиняє поворот більшого плеча кривошипа, що меншим плечем через шатун забезпечує різцю поступальне позиціювання за допомогою пружних напрямних в напрямку радіальної подачі. Висока точність переміщення різця забезпечується значною редукцією в приводі за рахунок наявності кривошипно-повзунного механізму з віссю напрямної, що не проходить через вісь повороту кривошипа. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 наведено загальний вигляд різцетримача, а на Фіг.2 - вид А на Фіг.1. Різцетримач складається з корпусу 1, з'єднаного за допомогою паралельних пружних напрямних 2 з віджимною частиною 3 (Фіг.1 та 2). У віджимній частині 3 виконані головна базуюча 4 (Фіг.2) та направляюча 5 (Фіг.1) поверхні для базування різця 6 . Пружні елементи 2 забезпечують можливість зміщення віджимної частини 3 відносно корпусу 1 в напрямку радіальної подачі. Привод переміщення віджимної частини З складається з диференціального гвинта 7, штовхача 8, що зафіксований від повороту та має можливість осьового переміщення, кривошипноповзунного механізму з віссю напрямної 9, що проходить через центр шарніра точку К паралельно направляючій поверхні 5, причому шарнір утворений між гвинтом попереднього натягу 10 та шатуном 11. Кривошипно-повзунний механізм включає в себе шатун 11 та двоплечий кривошип 12 з віссю повороту 13, що не проходить через вісь напрямної 9, зв'язаний більшим плечем L1 із штовхачем 8, а меншим плечем L2 через шатун 11 та гвинт 10 із віджимною частиною 3, що є повзуном на пружних напрямних. Двоплечий кривошип 12 передає рух від штовхача 8 через шатун 11 та гвинт 10 віджимній частині 3 з різцем. Величина осьового ходу А диференціального гвинта 7 визначає найбільшу деформацію пружних напрямних 2 в напрямку осі 9 та відповідно хід вершини різця 6. Використання пружних напрямних 2 в останній передачі від приводу до різця 6 дозволяє за рахунок попереднього натягу в приводі за допомогою гвинта 10 усунути зазори та фрикційні контакти при зворотньо-поступальних рухах різця та за рахунок великої' редукції в кривошипно-повзунному механізмі забезпечити високоточне позиціювання різця Є. Різцетримач працює слідуючим чином. Для здійснення під нал а годжу вального переміщення різця 6 в напрямку до оброблюваної1 деталі гвинт 7 повертається на кут, що відповідає необхідній величині позиціювання різця. Штовхач 8 зміщується вліво та повертає більше плече Li кривошипу 12 навколо осі 13 Кривошип повертаючись меншим плечем 12 розвертає шатун 11, _ який через гвинт 10 передає рух віджимній частині З з різцем 6. Віджимна частина 6, виконуючи функцію повзуна на пружних напрямних, зміщується відносно корпусу 1, згинаючи пружні напрямні 2 та збільшуючи натяг в приводі. Відведення різця від оброблюваної поверхні здійснюється зворотнім обертанням гвинта 7 При цьому штовхач 8 під дією сил пружних деформацій напрямних 2, що передаються через шатун 11 та кривошип 12, зміщується вправо і натяг в приводі зменшується. Джерела інформації1: 1. Кузнецов Ю.И., Маслов А.Р., Байков А.Н. Оснастка для станков с ЧПУ' Справочник. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1990. -512с. (с.272). 2. Авторское свидетельство СССР №1284719 кл. В23В29/03, 23.01.87 3. Авторское свидетельство СССР №1399001 кл. B23B29/Q34, 30.05.88. ВидА в 7 Фіг. 2 Комп'ютерна верстка Н. Лисенко Підписне Тираж 37 прим. Міністерство освіти t науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Киш - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTool-holder
Автори англійськоюShevchenko Oleksandr Vitaliiovych
Назва патенту російськоюРезцедержатель
Автори російськоюШевченко Александр Витальевич
МПК / Мітки
МПК: B23B 29/00
Мітки: різцетримач
Код посилання
<a href="https://ua.patents.su/2-4186-rizcetrimach.html" target="_blank" rel="follow" title="База патентів України">Різцетримач</a>
Різцетримач

Номер патенту: 56855
Опубліковано: 15.05.2003
Автори: Шевченко Олександр Віталійович, Бєляєва Анастасія Юріївна
МПК: B23B 25/00
Мітки: різцетримач
Формула / Реферат:
Різцетримач, що містить корпус, віджимну частину з різцем, зв'язану з корпусом пружними елементами, привід її переміщення, який відрізняється тим, що привід споряджено кривошипом з віссю, перехрещеною під кутом α до осі обертання приводу, шайбою з трьома осями обертання, що встановлена на осі кривошипа і зв'язана з корпусом шпонкою, та шатуном, як передаточним елементом між віджимною частиною з різцем і шайбою.
Різцетримач
Номер патенту: 38139
Опубліковано: 15.05.2001
Автори: Кравець Олександр Михайлович, Шевченко Олександр Віталійович, Халіль М.Х. Аль-Башиті
МПК: B23B 25/00
Мітки: різцетримач
Формула / Реферат:
Різцетримач, що містить корпус, віджимну частину з різцем, зв'язану з корпусом пружними елементами, привід її переміщення, що включає двоплечий важіль, встановлений на закріпленій в корпусі осі як передаточний елемент між віджимною частиною та приводом, який відрізняється тим, що привід споряджено ексцентриком з регульованим ексцентриситетом та шарніром у вигляді циліндричної з двома ступенями рухливості кінематичної пари.
Регульований різцетримач
Номер патенту: 71351
Опубліковано: 15.11.2004
Автори: Тітаренко Оксана Валеріївна, Лавріненко Сергій Миколайович
МПК: B23B 29/00
Мітки: регульованій, різцетримач
Формула / Реферат:
Регульований різцетримач, що містить основу і встановлену в ній з можливістю повороту і фіксації сферичну державку з гніздом під інструмент, яий відрізняється тим, що в сферичній державці, яка встановлена в губках з конічною опорною поверхнею, виконані отвори під регулювальний ключ, який має опорну та регулювальну сферичні робочі частини.
Ручний свердлильний верстат
Номер патенту: 3952
Опубліковано: 15.12.2004
Автор: Мущинський Анатолій Климович
МПК: B23B 45/00
Мітки: ручний, свердлильний, верстат
Формула / Реферат:
1. Ручний свердлильний верстат, що складається з електродвигуна і редуктора, поміщених у загальний корпус, і патрона для кріплення різця, який відрізняється тим, що патрон виконаний у вигляді головки (8) з пазами типу “ластівчин хвіст”, де розміщені різці (20).2. Верстат по п. 1, який відрізняється тим, що редуктор виконаний черв'ячним з корпусом (3), що має можливість переміщення по напрямних (2).3. Верстат по п. 1, який...
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки
Номер патенту: 53876
Опубліковано: 17.02.2003
Автори: Свєтловський Олександр Борисович, Харжевський В'ячеслав Олександрович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: вихідної, регульованою, зупинки, тривалістю, механізм, шарнірно-важільний, ланки
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з шатуном, який шарнірно зв'язаний з повзуном, який відрізняється тим, що відстань між осями шарнірів і довжина кривошипа регульовані.
Попередній патент: Спосіб контролю режиму роботи технологічного об’єкта магістрального газопроводу
Наступний патент: Кнопка керування
Випадковий патент: Cпociб oдepжaння bitamih d3-е білкового комплексу