Шпиндельний вузол
Номер патенту: 4408
Опубліковано: 17.01.2005
Автори: Гречка Андрій Іванович, Крижанівський Володимир Андрійович, Ткачук Катерина Юріївна, Пестунов Володимир Михайлович
Формула / Реферат
Шпиндельний вузол, що містить корпус і встановлений у ньому на двох опорах шпиндель, який відрізняється тим, що кожна опора встановлена в ексцентричну втулку, яка в свою чергу встановлена в ексцентричну втулку в корпусі, при цьому кожна з ексцентричних втулок зв'язана з двигуном, включеним до системи управління, а кожна опора оснащена взаємно перпендикулярно розташованими датчиками положення циліндричної поверхні шпинделя, що включені до системи управління двигунами.
Текст
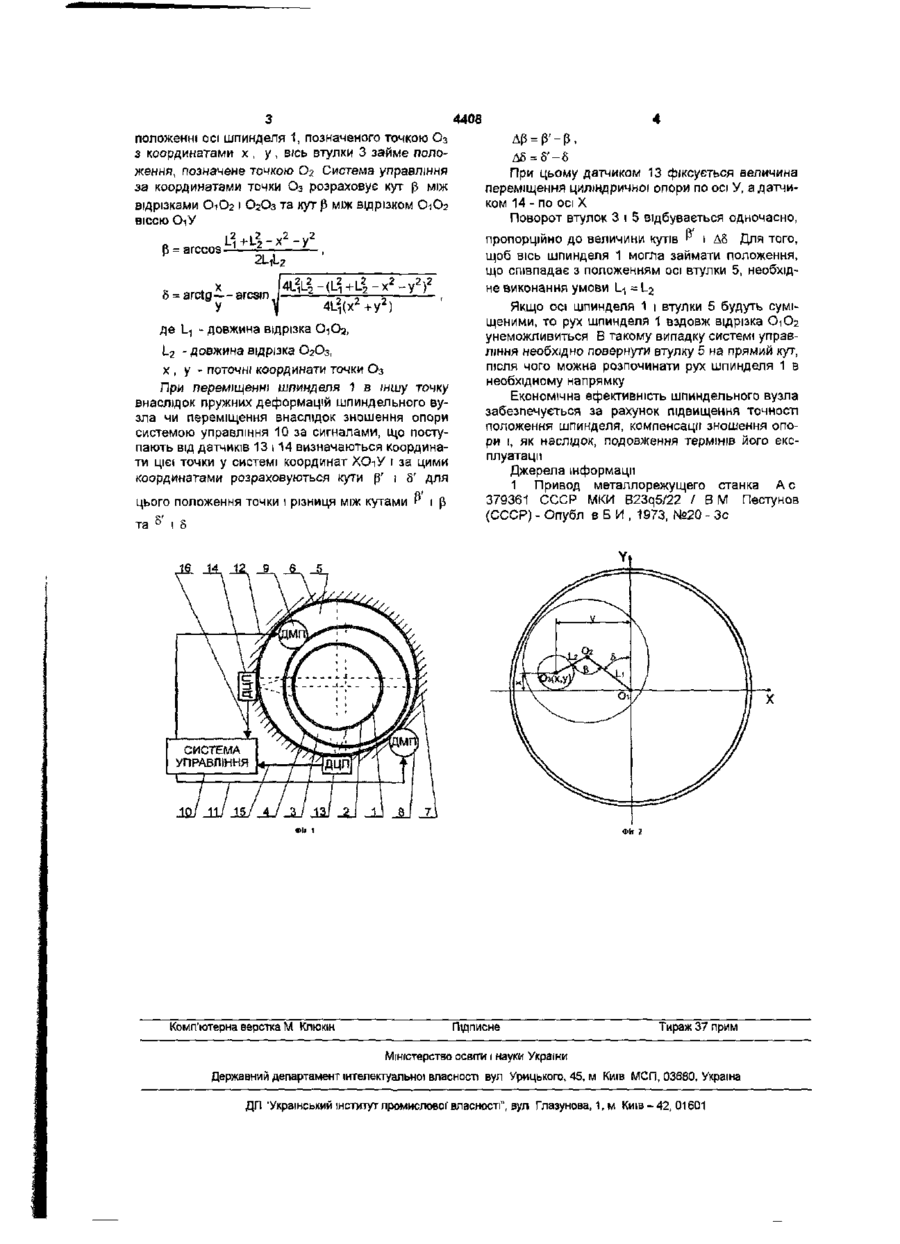
УКРАЇНА (19) UA (11,4408 из, U {51J7B23Q37/00 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС ДО ДЕКЛАРАЦІЙНОГО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ видається під відповідальність власника патенту (54) ШПИНДЕЛЬНИЙ ВУЗОЛ 1 (21,20040503396 (22, 06 05 2004 (24)17 01 2005 (46) 17 01 2005, Бюл №1, 2005р (72) Крижанівський Володимир Андрійович, Пестунов Володимир Михайлович, Гречка Андрій Іванович, Ткачук Катерина Юривна (73) Кіровоградський національний технічний університет (57, Шпиндельний вузол, що містить корпус і встановлений у ньому на двох опорах шпиндель, який відрізняється тим, що кожна опора встановлена в ексцентричну втулку, яка в свою чергу встановлена в ексцентричну втулку в корпусі при цьому кожна з ексцентричних втулок зв'язана з двигуном, включеним до системи управління, а кожна опора оснащена взаємно перпендикулярно розташованими датчиками положення циліндричної поверхні шпинделя, що включені до системи управління двигунами Шпиндельний вузол відноситься до верстатобудування і, зокрема, до управляємих верстатних систем Відомий шпиндельний вузол, що має корпус і містить встановлений у ньому на двох опорах шпиндель [1] Відомий шпиндельний вузол не забезпечує компенсації пружної деформації і зношення опор, що знижує точність верстата В основу корисної моделі поставлена задача підвищення точності шпиндельного вузла шляхом компенсації пружної деформації і зношення опор Поставлена задача вирішується тим що кожна опора встановлена в ексцентричній втулці, яка в свою чергу також встановлена в ексцентричній втулці в корпусі, при цьому кожна з ексцентричних втулок зв'язана з двигуном, включеним до системи управління, а кожна опора оснащена взаємно перпендикулярно розташованими датчиками положення циліндричної поверхні шпинделя, що включені до системи управління двигунами Схема шпиндельного вузла приведена на фіг 1, розрахункова схема - на фіг 2 Шпиндель 1 розташований на опорах 2 з ексцентриситетом у втулці 3 Для спрощення схеми на фіг 1 показано лише елементи із сторони передньої опори Схема елементів із сторони задньої опори аналогічна Втулка 3 на напрямних 4 розташована з ексцентриситетом у втулці 5, що на напрямних 6 обертається у корпусі 7 Обертання втулки 5 на напрямних 6 у корпусі 7 здійснюється за допомогою двигуна малих переміщень 8, роз ташованому на корпусі 7 Обертання втулки 3 на напрямних 4 у втулці 5 здійснюється за допомогою двигуна малих переміщень 9, розташованому на втулці 5 Управляються двигуни 8 і 9 від системи управління 10 по каналам 11 і 12 ВІДПОВІДНО По ложення шпинделя 1 відносно корпусу 7 контролюється взаємно перпендикулярно розташованими на корпусі 7 датчиками положення циліндричної поверхні 13 114 Сигнали від датчиків 13 і 14 поступають по ВІДПОВІДНИМ каналам 15 і 16 до системи управління 10 При виникненні пружних деформацій шпиндельного вузла чи переміщення внаслідок зношення опори датчики 13 і 14 фіксують величину переміщення циліндричної поверхні шпинделя 1 відносно корпусу 7 і надають сигнали по каналам 15 і 16 до системи управління 10 В системі управління дані сигнали порівнюються із заданими, прийнятими за початкове положення шпинделя 1 По різниці між цими сигналами система управління надає управляючі імпульси по каналам 11 і 12 до двигунів малих переміщень 8 і 9 ВІДПОВІДНО Дані двигуни приводять у обертання на ВІДПОВІДНИЙ кут втулки 3 і 5, внаслідок чого шпиндель 1 займе початкове положення Для визначення величин кутів повороту втулок З і 5 в залежності від величини переміщення циліндричної поверхні шпинделя 1 розглянемо розрахункову схему, зображені на фіг 2 Систему координат ХОіУ, в якій переміщується шпиндель 1, прив'яжемо до точки O^ перетину осі втулки 5 з площиною п обертання У довільному початковому 00 о 4408 положенні осі шпинделя 1, позначеного точкою Оз з координатами х , у , вісь втулки 3 займе положення, позначене точкою О-г Система управління за координатами точки О 3 розраховує кут р між відрізками ОіОг і ОгОз та кут р між відрізком О1О2 віссю ОіУ р = arccos — " 2U У2)2 = arctg—arcsin У де Lj - довжина відрізка СнОг, L 2 -довжина відрізка О 2 О 3 і х , у - поточні координати точки О 3 При переміщенні шпинделя 1 в іншу точку внаслідок пружних деформацій шпиндельного вузла чи переміщення внаслідок зношення опори системою управління 10 за сигналами, що поступають від датчиків 13 114 визначаються координати цієї точки у системі координат ХО-іУ і за цими координатами розраховуються кути р' і S' для цього положення точки і різниця між кутами 5 та ' і 8 16 U і р При цьому датчиком 13 фіксується величина переміщення циліндричної опори по ос) У, а датчиком 14 - по осі X Поворот втулок 3 і 5 відбувається одночасно, пропорційно до величини кутів Р і Дб Для того, щоб вісь шпинделя 1 могла займати положення, що співпадає з положенням осі втулки 5, необхідне виконання умови Ц = 12 _ Якщо осі шпинделя 1 і втулки 5 будуть суміщеними, то рух шпинделя 1 вздовж відрізка О1О2 унеможливиться В такому випадку системі управління необхідно повернути втулку 5 на прямий кут, після чого можна розпочинати рух шпинделя 1 в необхідному напрямку Економічна ефективність шпиндельного вузла забезпечується за рахунок підвищення точності положення шпинделя, компенсації зношення опори і, як наслідок, подовження термінів його експлуатації Джерела інформації 1 Привод металлорежущего станка А с 379361 СССР МКИ B23q5/22 / В М Пестунов (СССР) - Опубл в Б И , 1973, №20 - Зс 1 Комп'ютерна верстка М Клкжін Підписне Тираж 37 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності вул Урицького, 45, м Київ МСП, 03680, Україна ДП 'Український інститут промислової власності", вул Глазунова, 1, м Киш-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSpindle assembly
Автори англійськоюKryzhanivskyi Volodymyr Andriiovych, Pestunov Volodymyr Mykhailovych, Hrechka Andrii Ivanovych
Назва патенту російськоюШпиндельный узел
Автори російськоюКрижанивский Владимир Андреевич, Пестунов Владимир Михайлович, Гречка Андрей Иванович
МПК / Мітки
МПК: B23Q 37/00
Мітки: вузол, шпіндельний
Код посилання
<a href="https://ua.patents.su/2-4408-shpindelnijj-vuzol.html" target="_blank" rel="follow" title="База патентів України">Шпиндельний вузол</a>
Шпиндельний вузол

Номер патенту: 69541
Опубліковано: 15.09.2004
Автори: Каприця Олександр Сергійович, Крижанівський Володимир Андрійович, Пестунов Володимир Михайлович
МПК: B24B 41/00
Мітки: вузол, шпіндельний
Формула / Реферат:
1. Шпиндельний вузол верстата, що містить встановлений на опорах шпиндель, в передній частині якого рівномірно по колу розташовані датчики пружної деформації, ввімкнені в систему автоматичного регулювання, який відрізняється тим, що передня опора виконана гідростатичною та складається із трьох рівномірно розташованих по колу секцій, при цьому кожна секція розміщена протилежно відповідному датчику.2. Шпиндельний вузол по п. 1, який...
Вузол шпиндельний однопозиційного токарного автомата з цанговим патроном почергового затиску
Номер патенту: 70688
Опубліковано: 15.10.2004
Автор: Фіщенко Володимир Михайлович
МПК: B23Q 3/00
Мітки: однопозиційного, затиску, шпіндельний, почергового, вузол, цанговим, токарного, патроном, автомата
Формула / Реферат:
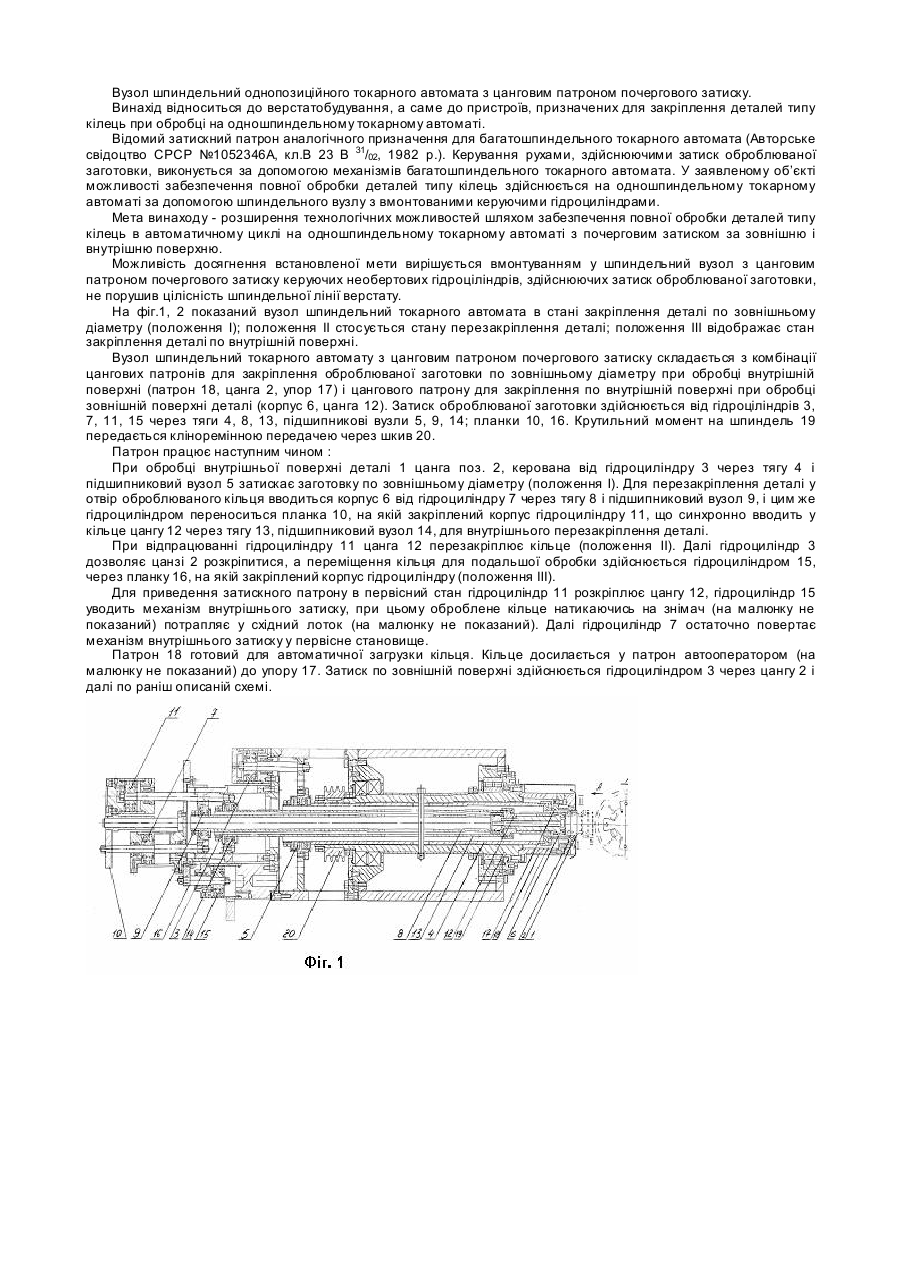
Вузол шпиндельний однопозиційного токарного автомата з цанговим патроном почергового затиску, який відрізняється тим, що додатково має керуючі необертові гідроциліндри.
Вузол шпиндельний токарного автомата з затискним патроном подвійної дії
Номер патенту: 65326
Опубліковано: 15.03.2004
Автор: Фіщенко Володимир Михайлович
МПК: B23B 31/02
Мітки: патроном, вузол, токарного, подвійної, затискним, дії, автомата, шпіндельний
Формула / Реферат:
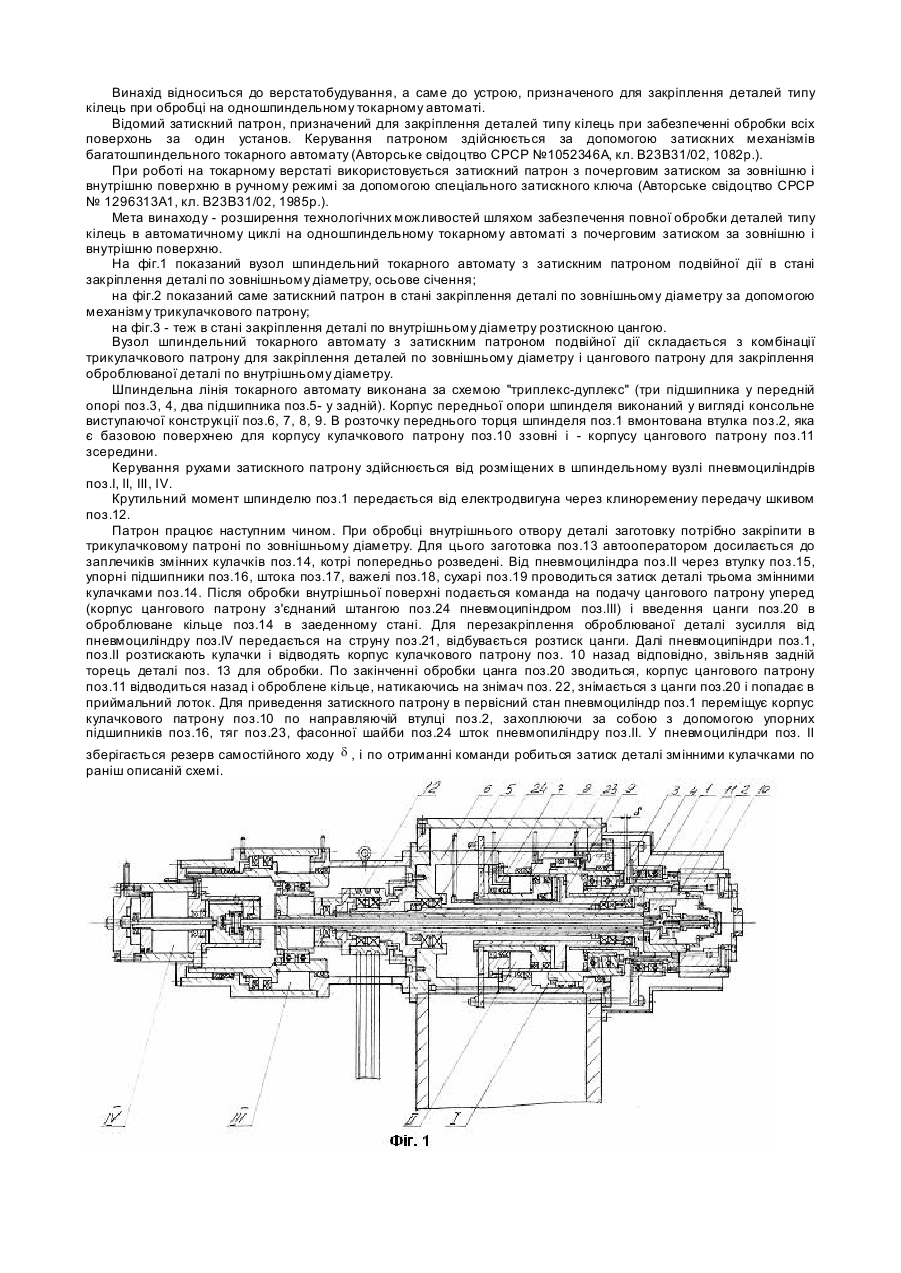
1. Вузол шпиндельний токарного автомата з затискним патроном подвійної дії, який відрізняється тим тим, що для розширення технологічних можливостей при обробці на одношпиндельному токарном автоматі в автоматичному режимі управління рухами затискного патрона під час обробки здійснюється від пневмоциліндрів, розміщених у шпиндельному вузлі верстата.2. Вузол за п. 1, який відрізняється тим, що за весь цикл обробки положення оброблюваної...
Шпиндельний вузол важкого токарного верстату
Номер патенту: 12131
Опубліковано: 25.12.1996
Автори: Єгоров Володимир Георгієвич, Жильцов Євген Миколайович, Брольнік Йосип Ілліч
МПК: B23B 19/00
Мітки: важкого, шпіндельний, верстату, токарного, вузол
Формула / Реферат:
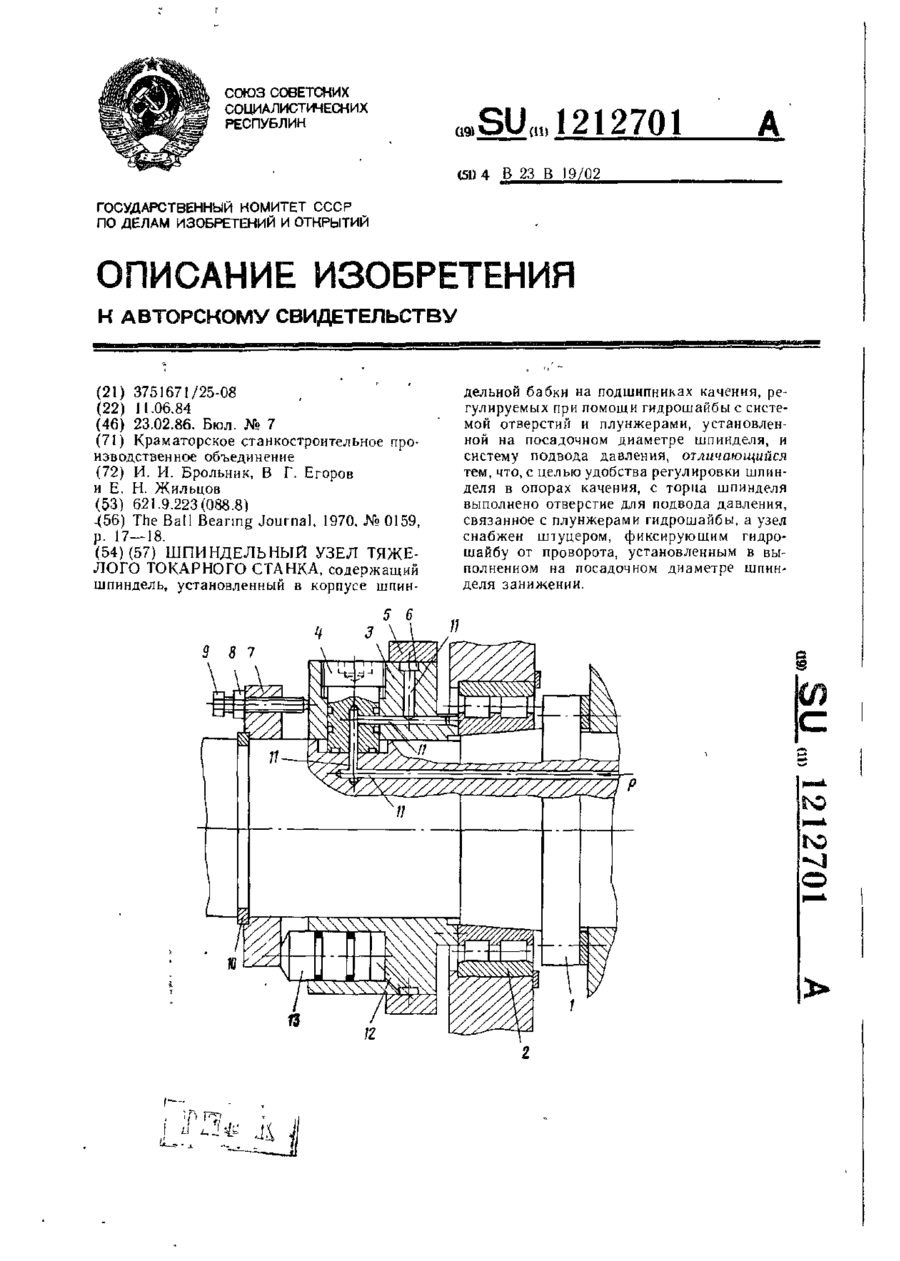
Шпиндельный узел тяжелого токарного станка, содержащий шпиндель, установленный в корпусе шпиндельной бабки на подшипниках качения, регулируемых при помощи гидрошайбы с системой отверстий и плунжерами, установленной на посадочном диаметре шпинделя систему подвода давления, отличающийся тем, что, с целью удобства регулировки шпинделя в опорах качения, с торца шпинделя выполнено отверстие для подвода давления, связанное с плунжерами...
Шпиндельний вузол
Номер патенту: 17225
Опубліковано: 01.04.1997
Автори: Хіцан Валерій Дмитрович, Гаврилюк Юрій Романович, Карпусь Владислав Євгенович, Тимофієв Юрій Вікторович
МПК: B23B 19/00, B23Q 5/22
Мітки: шпіндельний, вузол
Формула / Реферат:
Шпиндельный узел, содержащий цилиндрическую втулку, элементы оребрения и электромагнтную катушку, отличающийся тем, что узел снабжен цилиндрическим корпусом, установленным соосно со шпинделем, элементами оребрения с плоской поверхностью, втулкой с наружной резьбой, в которой установлены опоры шпинделя, втулкой с внутренней резьбой, выполняющей роль гайки по отношению к втулке с наружной резьбой и имеющей длину меньше последней на величину ее...
Попередній патент: Пристрій для запобігання утворенню пролежнів
Наступний патент: Тарілчастий дозатор
Випадковий патент: Спосіб дроблення матеріалів в молотковій дробарці