Маніпуляційна система
Номер патенту: 47225
Опубліковано: 17.06.2002
Автори: Бланар Олег Володимирович, Кондратенко Віктор Васильович
Формула / Реферат
1. Маніпуляційна система, яка містить маніпулятор із захватом і мобільний блок, що включає засіб переміщення по ланках транспортної магістралі і керовані приводи, яка відрізняється тим, що в неї введений привідний технологічний візок із комплектом ланок, виконаних у вигляді окремих напрямних з елементами стикування, а маніпулятор установлений на засобі переміщення з можливістю поступального й обертального руху для захоплення і перенесення напрямних і наступного їхнього стикування, причому привідний технологічний візок і мобільний блок установлені на попередньо змонтованих початкових напрямних.
2. Маніпуляційна система за п. 1, яка відрізняється тим, що комплект напрямних включає напрямні з різною кривизною.
Текст
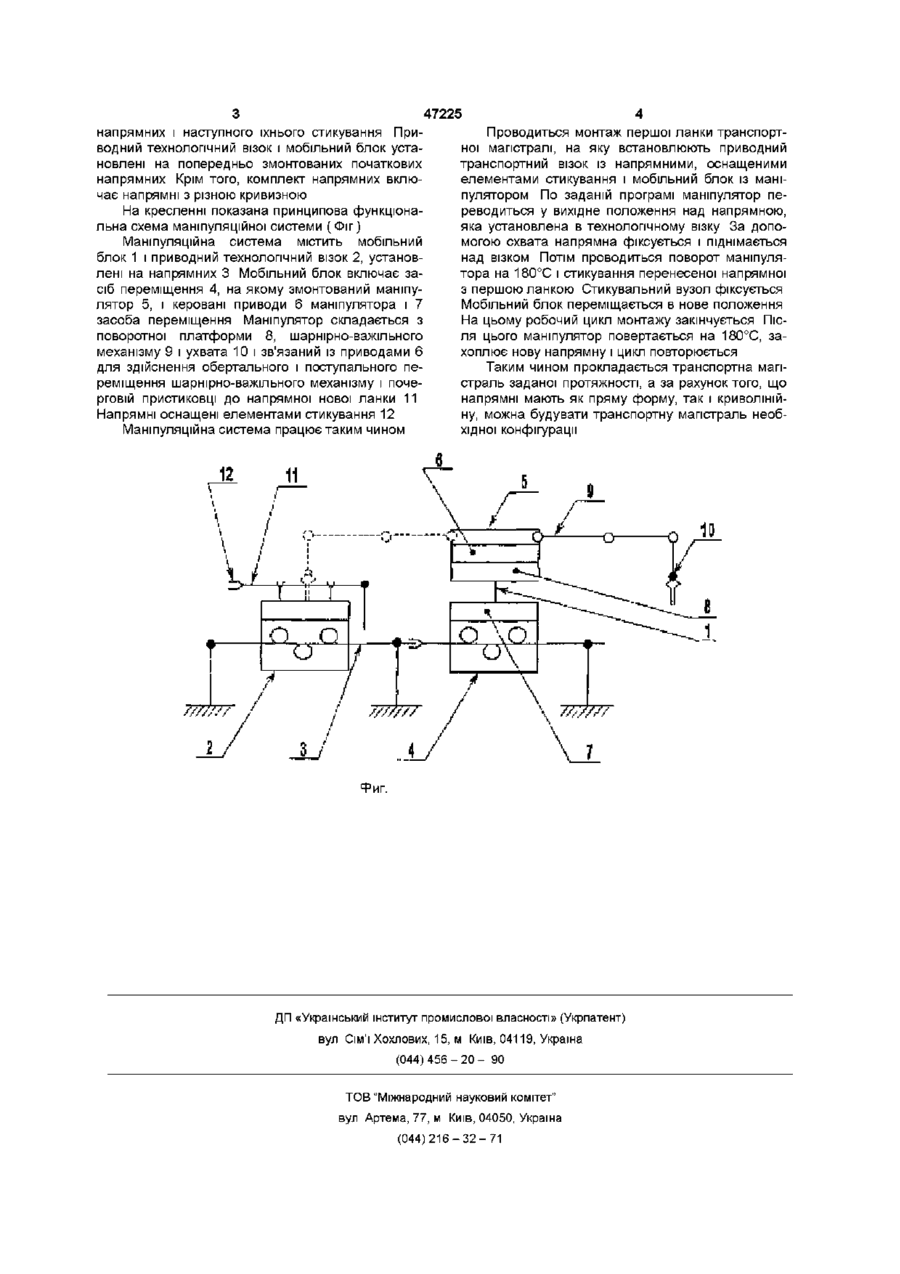
1 Маніпуляційна система, яка містить маніпулятор із захватом і мобільний блок, що включає засіб переміщення по ланках транспортної магістралі і керовані приводи, яка відрізняється тим, Винахід відноситься до машинобудування і може бути використаний при створенні засобів маніпулювання для монтажно-бущвельних, ремонтних і контрольных операцій в екстремальних умовах, переважно для будівництва транспортної магістралі, призначеної для переміщення маніпуляторів у важкодоступних зонах За прототип винаходу, що заявляється, обрана дистанційно-керована манілуляційна система по а с № 1784451, кл В 25 J 11/00, опубл у 1992, яка містить маніпулятор із ланками, сполученими кінематичними парами і мобільний блок, що включає засіб переміщення по ланках маніпулятора і керовані приводи Відома маніпуляційна система не дозволяє переміщати маніпулятор у приміщеннях із завалами, будівельним сміттям, провалами і траншеями при проведенні ліквідаційних робіт після аварії Для виконання таких робіт, пов'язаних із перевезенням вантажів, система не має необхідну жорсткість, маневренність і несучу спроможність Основне завдання, яке ставилося при виборі технічних рішень полягало втому, щоб забезпечити можливість доставки і переміщення маніпуляторів у важкодоступних зонах для проведення широкого кола робіт, пов'язаних із добуванням, контейнеризацією і транспортуванням радіактивних ВІДХОДІВ, а також інших робіт по ліквідації наслідків аварії в екстремальних умовах Для цього було запропоновано побудувати транспортну магі що в неї введений привідний технологічний візок із комплектом ланок, виконаних у вигляді окремих напрямних з елементами стикування, а маніпулятор установлений на засобі переміщення з можливістю поступального й обертального руху для захоплення і перенесення напрямних і наступного їхнього стикування, причому привідний технологічний візок і мобільний блок установлені на попередньо змонтованих початкових напрямних 2 Маніпуляційна система за п 1, яка відрізняється тим, що комплект напрямних включає напрямні 3 різною кривизною страль необхідної протяжності і конфігурації Оскільки будівництво необхідно робити в умовах підвищеної радіації, а протяжність дороги може бути велика, виходячи з масштабів аварії, було запропоновано будувати транспортну магістраль за допомогою дистанційно-керованих засобів Відома маніпуляційна система, описана вище, не дозволяє дистаційно збирати транспортну магістраль Система не забезпечує необхідну конфігурацію і жорсткість, Ці недоліки усуваються запропонованим технічним рішенням В основу винаходу поставлена задача створення маніпуляційної системи, у якій за рахунок введення нових вузлів і зв'язків забезпечується можливість послідовного стикування напрямних по заданій програмі для будівництва транспортної магістралі необхідної конфігурації і протяжності в екстремальних умовах Крім того, система має високу маневреність, жорсткість і несучу спроможність Поставлена задача вирішується тим, що в манілуляційну систему, яка містить маніпулятор із захватом і мобільний блок, що включає засіб переміщення по ланках транспортної магістралі і керовані приводи, згідно винаходу введений привідний технологічний візок з комплектом ланок, виконаних у вигляді окремих напрямних з елементами стикування, а маніпулятор установлений на засобі переміщення з можливістю поступального й обертального руху для захоплення і перенесення ю 47225 4 напрямних і наступного їхнього стикування ПриПроводиться монтаж першої ланки транспортводний технологічний візок і мобільний блок устаної магістралі, на яку встановлюють приводний новлені на попередньо змонтованих початкових транспортний візок із напрямними, оснащеними напрямних Крім того, комплект напрямних вклюелементами стикування і мобільний блок із манічає напрямні з різною кривизною пулятором По заданій програмі маніпулятор переводиться у вихідне положення над напрямною, На кресленні показана принципова функціонаяка установлена в технологічному візку За допольна схема маніпуляційної системи ( Фіг) могою схвата напрямна фіксується і піднімається Мані пуля цій на система містить мобільний над візком Потім проводиться поворот маніпуляблок 1 і приводний технологічний візок 2, установтора на 180°С і стикування перенесеної напрямної лені на напрямних 3 Мобільний блок включає заз першою ланкою Стикувальний вузол фіксується сіб переміщення 4, на якому змонтований маніпуМобільний блок переміщається в нове положення лятор 5, і керовані приводи 6 маніпулятора і 7 На цьому робочий цикл монтажу закінчується Пісзасоба переміщення Маніпулятор складається з ля цього маніпулятор повертається на 180°С, заповоротної платформи 8, шарнірно-важільного хоплює нову напрямну і цикл повторюється механізму 9 і ухвата 10 і зв'язаний із приводами 6 для здійснення обертального і поступального пеТаким чином прокладається транспортна магіреміщення шарнірно-важільного механізму і почестраль заданої протяжності, а за рахунок того, що рговій пристиковці до напрямної нової ланки 11 напрямні мають як пряму форму, так і криволінійНапрямні оснащені елементами стикування 12 ну, можна будувати транспортну магістраль необхідної конфігурації Маніпуляційна система працює таким чином Фиг. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюBlanar Oleh Volodymyrovych
Автори російськоюБланар Олег Владимирович
МПК / Мітки
МПК: B25J 5/00, B25J 11/00
Мітки: маніпуляційна, система
Код посилання
<a href="https://ua.patents.su/2-47225-manipulyacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Маніпуляційна система</a>
Масажно-маніпуляційна кушетка
Номер патенту: 2546
Опубліковано: 26.12.1994
Автор: Скринник Олексій Михайлович
МПК: A61F 5/045
Мітки: кушетка, масажно-маніпуляційна
Формула / Реферат:
1. Массажно-манипуляционная кушетка, содержащая основание на опорах, на котором расположен лежак с подвижными секциями, соединенными с механизмами их передвижения, отличающаяся тем, что в нее введена шарнирно прикрепленная к торцовой части основания или лежака радиальная лестница с фиксирующими ее положение стойками, опирающимися на основание, при этом одна из подвижных секций выполнена не менее чем из трех поперечных пластин, соединенных...
Система віброзбудження вібраційної установки
Номер патенту: 712
Опубліковано: 15.02.2001
Автор: Симонюк Володимир Павлович
МПК: B06B 1/18, B24B 31/06
Мітки: система, вібраційної, віброзбудження, установки
Формула / Реферат:
Система віброзбудження вібраційної установки, яка містить встановлений з можливістю реверсивного обертання горизонтальний стіл, а також обладнаний вушками і змонтований на напрямних робочий контейнер та електромагнітний привід, яка відрізняється тим, що робочий контейнер з'єднаний з вушками шарнірно, а електромагніти приводу розташовані еквідистантно по периметру робочого контейнера та симетрично напрямним, при цьому кількість електромагнітів...
Гемодіалізна система зі зменшеним об’ємом екстракорпорального контуру
Номер патенту: 853
Опубліковано: 16.07.2001
Автор: Поліщук Сергій Тимофійович
МПК: A61M 1/14
Мітки: система, зменшеним, екстракорпорального, гемодіалізна, контуру, об'ємом
Формула / Реферат:
Гемодіалізна система зі зменшеним об'ємом екстракорпорального контуру, яка містить артеріальний і венозний конектори пунктуючого елемента, який знаходиться в судині (судинах) пацієнта, розташованого в діалізному кріслі, артеріальну магістраль з насосним сегментом, який розташовано у насосі крові, венозну магістраль з повітряною пасткою, яка розташована у детекторі повітря і вихід повітряної пастки проходить через перетискач венозної...
Система гідропневмоочистки стекол оглядових приладів командирської башточки танка
Номер патенту: 29548
Опубліковано: 15.11.2000
Автори: Оробинський Василь Миколайович, Ісаєв Володимир Васильович, Фролов Леонід Андрійович, Руденко Микола Прохорович
Мітки: система, командирської, танка, гідропневмоочистки, приладів, башточки, стекол, оглядових
Текст:
...круговий огляд при будь-яких запиленості та забрудненні, які мають місце в реальних умовах експлуа тації об'єкта, що підви щує ві рогідність виявлення цілей на полі бою, підвищує живучість танка та ефективність його ви користання. Суть ви нахо ду пояснюється кресленням, на якому представлена схе ма системи гідропневмоочистки з конструкцією приймального та передавального пристроїв. Систе ма гідропневмоочистки стекол оглядових приладів 1...
Система резервного водопостачання

Номер патенту: 315
Опубліковано: 30.04.1999
Автори: Біленький Леонід Васильович, Федін Олег Миколайович
МПК: E03B 7/00
Мітки: водопостачання, резервного, система
Формула / Реферат:
Система резервного водопостачання, яка містить бак, подавальний трубопровід з поплавковим клапаном, що має шток, який шарнірно з'єднаний за допомогою важеля з поплавком, трубку переливу в баці, яка відрізняється тим, що система додатково містить трубопровід споживача, зливний трубопровід, які підключені до баку, два запірних клапани, один з яких підключений до подавального трубопроводу, а другий підключений між трубопроводом споживача та...
Попередній патент: Колесо транспортного засобу
Наступний патент: Спосіб обеззаражування води
Випадковий патент: Шафа комплектного розподільного пристрою