Система контролю за траєкторією руху
Номер патенту: 53393
Опубліковано: 11.10.2010
Формула / Реферат
Система контролю за траєкторією руху, що включає супутниковий навігаційний пристрій, який складається з антени та курсопокажчика, яка відрізняється тим, що курсопокажчик обладнують електронним блоком з індикатором і датчиком бічних прискорень, причому виходи курсопокажчика та датчика бічних прискорень з'єднані з входами електронного блока.
Текст
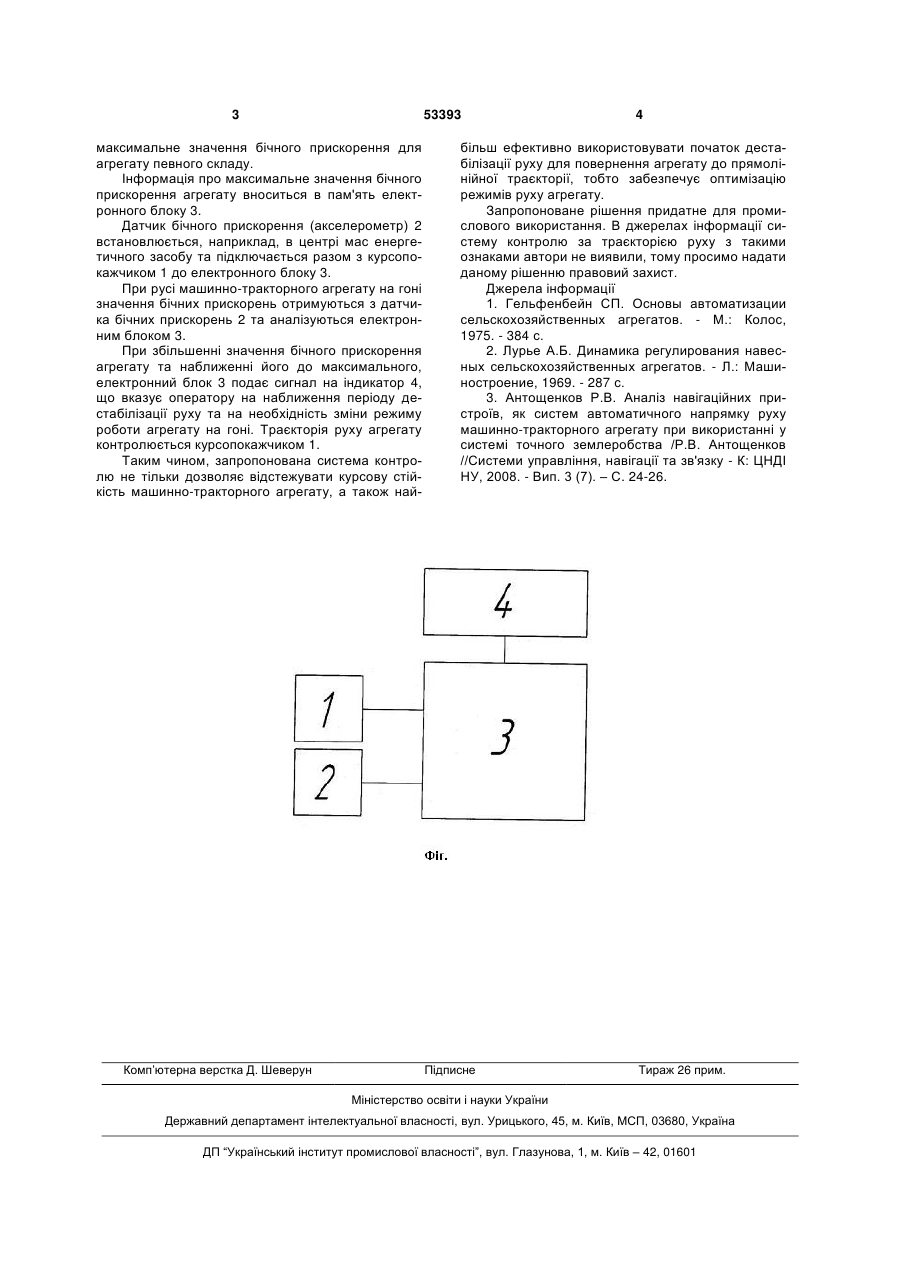
Система контролю за траєкторією руху, що включає супутниковий навігаційний пристрій, який складається з антени та курсопокажчика, яка відрізняється тим, що курсопокажчик обладнують електронним блоком з індикатором і датчиком бічних прискорень, причому виходи курсопокажчика та датчика бічних прискорень з'єднані з входами електронного блока. (19) (21) u201002674 (22) 10.03.2010 (24) 11.10.2010 (46) 11.10.2010, Бюл.№ 19, 2010 р. (72) ЛЕБЕДЄВ АНАТОЛІЙ ТИХОНОВИЧ, КАЛІНІН ЄВГЕН ІВАНОВИЧ (73) ХАРКІВСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ СІЛЬСЬКОГО ГОСПОДАРСТВА ІМЕНІ ПЕТРА ВАСИЛЕНКА 3 53393 максимальне значення бічного прискорення для агрегату певного складу. Інформація про максимальне значення бічного прискорення агрегату вноситься в пам'ять електронного блоку 3. Датчик бічного прискорення (акселерометр) 2 встановлюється, наприклад, в центрі мас енергетичного засобу та підключається разом з курсопокажчиком 1 до електронного блоку 3. При русі машинно-тракторного агрегату на гоні значення бічних прискорень отримуються з датчика бічних прискорень 2 та аналізуються електронним блоком 3. При збільшенні значення бічного прискорення агрегату та наближенні його до максимального, електронний блок 3 подає сигнал на індикатор 4, що вказує оператору на наближення періоду дестабілізації руху та на необхідність зміни режиму роботи агрегату на гоні. Траєкторія руху агрегату контролюється курсопокажчиком 1. Таким чином, запропонована система контролю не тільки дозволяє відстежувати курсову стійкість машинно-тракторного агрегату, а також най Комп’ютерна верстка Д. Шеверун 4 більш ефективно використовувати початок дестабілізації руху для повернення агрегату до прямолінійної траєкторії, тобто забезпечує оптимізацію режимів руху агрегату. Запропоноване рішення придатне для промислового використання. В джерелах інформації систему контролю за траєкторією руху з такими ознаками автори не виявили, тому просимо надати даному рішенню правовий захист. Джерела інформації 1. Гельфенбейн СП. Основы автоматизации сельскохозяйственных агрегатов. - М.: Колос, 1975. - 384 с. 2. Лурье А.Б. Динамика регулирования навесных сельскохозяйственных агрегатов. - Л.: Машиностроение, 1969. - 287 с. 3. Антощенков Р.В. Аналіз навігаційних пристроїв, як систем автоматичного напрямку руху машинно-тракторного агрегату при використанні у системі точного землеробства /Р.В. Антощенков //Системи управління, навігації та зв'язку - К: ЦНДІ НУ, 2008. - Вип. 3 (7). – С. 24-26. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMotion trajectory checking system
Автори англійськоюLebediev Anatolii Tykhonovych, Kalinin Yevhen Ivanovych
Назва патенту російськоюСистема контроля траектории движения
Автори російськоюЛебедев Анатолий Тихонович, Калинин Евгений Иванович
МПК / Мітки
МПК: G08G 1/00
Мітки: траєкторією, руху, контролю, система
Код посилання
<a href="https://ua.patents.su/2-53393-sistema-kontrolyu-za-traehktoriehyu-rukhu.html" target="_blank" rel="follow" title="База патентів України">Система контролю за траєкторією руху</a>
Система контролю за траєкторією руху та витратою палива
Номер патенту: 51162
Опубліковано: 12.07.2010
Автори: Лебедєв Анатолій Тихонович, Антощенков Роман Вікторович, Артьомов Микола Прокопович, Антощенков Віктор Миколайович, Мазоренко Дмитро Іванович
МПК: G05B 7/00
Мітки: витратою, траєкторією, контролю, система, палива, руху
Формула / Реферат:
Система контролю за траєкторією руху та витратою палива, що включає супутниковий навігаційний пристрій, який складається з антени та курсопокажчика, який відрізняється тим, що додатково вводиться електронний блок з індикатором і датчик витрати палива, причому виходи курсопокажчика та датчика витрати палива з'єднані з входами електронного блока.
Система для визначення параметрів руху автотранспортних засобів при динамічних (кваліметричних) випробуваннях
Номер патенту: 51031
Опубліковано: 25.06.2010
Автори: Коробко Андрій Іванович, Подригало Михайло Абович, Файст Валерій Львович, Клец Дмитро Михайлович
МПК: G01P 3/00, G01P 15/00
Мітки: випробуваннях, автотранспортних, руху, параметрів, система, динамічних, засобів, визначення, кваліметричних
Формула / Реферат:
Система для визначення параметрів руху автотранспортних засобів (АТЗ) при динамічних (кваліметричних) випробуваннях, що складається з елементів вимірювання та пристроїв обробки та візуалізації інформації, яка відрізняється тим, що визначення параметрів руху здійснюють одночасно двома датчиками прискорень, причому датчики прискорень вимірюють прискорення АТЗ у повздовжній, поперечній та вертикальній площинах, інформацію про параметри руху АТЗ...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Дохов Олександр Іванович, Сітенко Олександр Миколайович, Грінченко Олена Володимирівна, Лук'янов Олександр Михайлович, Лук'янова Ольга Олексіївна
МПК: G01C 21/26, G08G 1/052, G08G 1/056
Мітки: пригоди, руху, система, виникнення, визначення, дорожньо-транспортної, дорожнього, факту, правил, автомобіля, водієм, автоматизованого, дотримання, контролю
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна
МПК: G08G 1/052, G01C 21/26, G08G 1/056
Мітки: автомобіля, система, автоматизованого, контролю, дотримання, дорожнього, руху, водієм, правил
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Система резервування вимірників тримірного руху транспортних засобів
Номер патенту: 18796
Опубліковано: 15.11.2006
Автори: Журавльова Надія Костянтинівна, Бандура Іван Миколайович, Сагіна Марина Юріївна
МПК: B64C 13/00
Мітки: резервування, система, вимірників, транспортних, тримірного, засобів, руху
Формула / Реферат:
1. Система резервування вимірників тримірного руху транспортних засобів, що містить три датчики, осі чутливості яких спрямовані уздовж трьох взаємно перпендикулярних осей зв'язаної системи координат керування транспортного засобу, виходи яких з'єднані з пристроєм контролю датчиків, яка відрізняється тим, що в неї введені чотири додаткових датчики, осі чутливості яких спрямовані вздовж осей косокутної системи координат, що розташовані...
Попередній патент: Режекторний фільтр
Наступний патент: Модифікатор для чавуну
Випадковий патент: Пристрій для визначення коефіцієнта зчеплення колеса дтз з дорожнім покриттям