Механізм для підйомно-транспортних операцій
Формула / Реферат
1. Механізм для підйомно-транспортних операцій, що містить портал з двома каретками для переміщення по рейковому шляху, на якому встановлено візок з маніпулятором з можливістю переміщення в напрямку, перпендикулярному рейковим напрямним, який відрізняється тим, що портал опертий на дві пари шарнірних опор.
2. Механізм за п. 1, який відрізняється тим, що для забезпечення стійкості при максимально піднятому порталі механізм переміщення обладнаний додатковим візком.
3. Механізм за п. 1, який відрізняється тим, що портал виконаний U-подібної форми.
4. Механізм за пп. 1 і 3, який відрізняється тим, що об'єм, утворений U-подібним порталом і не зайнятий привідним візком, забезпечує короткотермінове розміщення і транспортування лісоматеріалів.
Текст
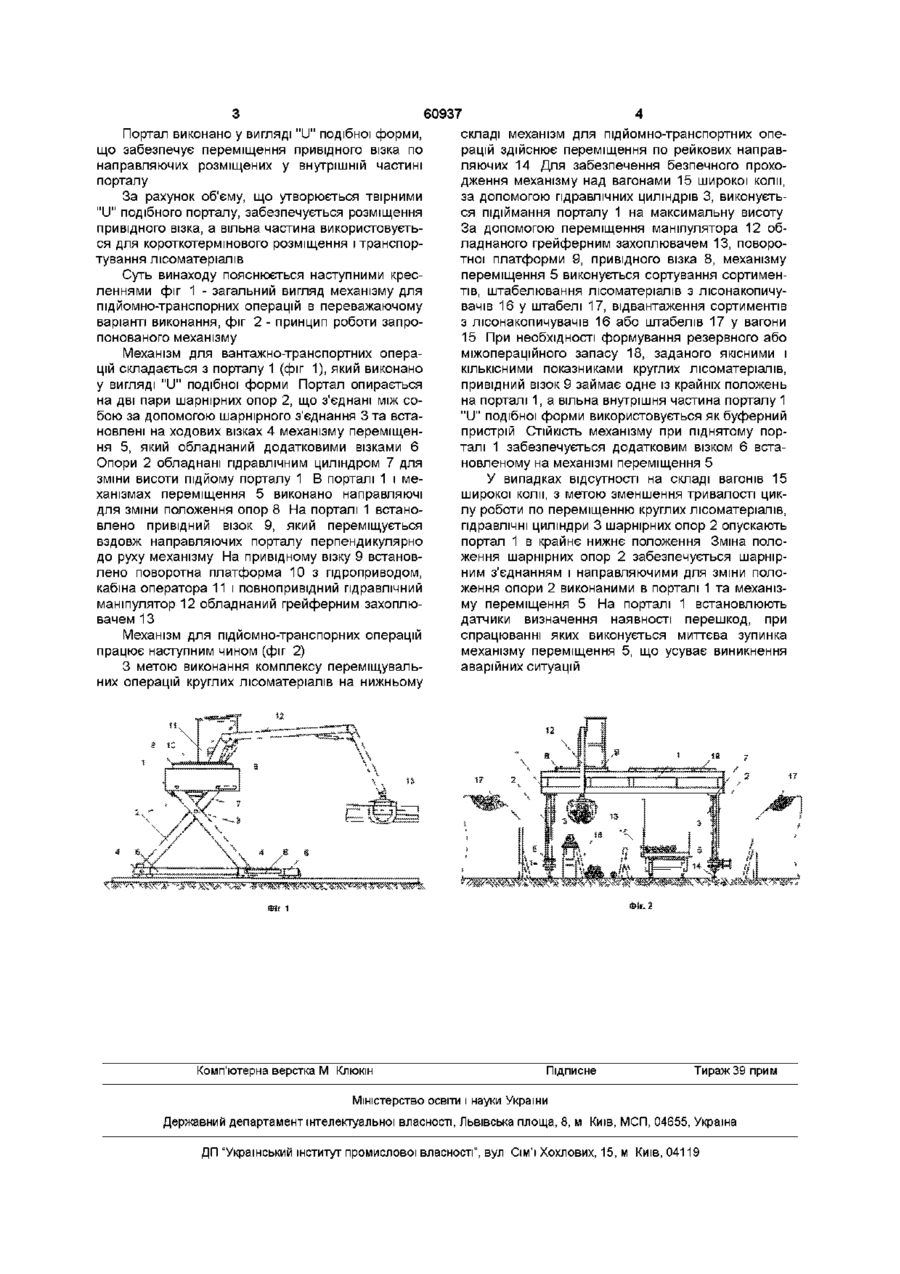
1 Механізм для підйомно-транспортних операцій, що містить портал з двома каретками для переміщення по рейковому шляху, на якому встановлено візок з маніпулятором з можливістю переміщення в напрямку, перпендикулярному рейковим напрямним, який відрізняється тим, що портал опертий на дві пари шарнірних опор Винахід відноситься до лісоскладського обладнання і призначений для виконання сортування, штабелювання, транспортування, подачі і відвантаження круглих лісоматеріалів, а також виконання функції буферного пристрою для міжопераційного короткотермінового зберігання круглих лісоматеріалів на головному технологічному потоці нижнього складу За прототип винаходу, що заявляється, обраний портальний робот Беляева Н П по патенту на винахід РФ №2080243, 27 05 1997, B25J5/04, який містить портал жорстко зв'язаний з двома каретками для переміщення по рейковому шляху, на якому розташований візок з маніпулятором з можливістю переміщення в напрямку перпендикулярному рейковим направляючим Відомий портальний робот Беляева Н П не має можливості виконувати повний комплекс підйомно-транспортних операцій на нижньому складі і створювати міжопераційний запас лісоматеріалів Для виконання таких робіт, пов'язаних з сортуванням і переміщенням круглих лісоматеріалів, портальний робот не має необхідної маневреності, СТІЙКОСТІ і несучої здатності Завданням, на вирішення якого направлений винахід, є створення можливості виконання комплексу підйомно-транспортних операцій одним універсальним механізмом, підвищення ефективності робіт за рахунок зменшення втрат часу на 2 Механізм за п 1, який відрізняється тим, що для забезпечення СТІЙКОСТІ при максимально під нятому порталі механізм переміщення обладнаний додатковим візком 3 Механізм за п 1, який відрізняється тим, що портал виконаний U-подібноі форми 4 Механізм за пп 1 і 3, який відрізняється тим, що об'єм, утворений U-подібним порталом і не зайнятий привідним візком, забезпечує короткотермінове розміщення і транспортування лісоматеріалів виконання циклу операції, гнучкості виробничого процесу, збільшення вантажопідйомності Відомий портальний робот, описаний вище, не дозволяє виконувати переміщення круглих лісоматеріалів у ВІДПОВІДНОСТІ до вимог технологічного процесу нижнього складу та функції буферного механізму для круглих лісоматеріалів визначеної сортиментної групи Портальний робот не забезпечує необхідну конфігурацію і мобільність Ці недоліки усуваються запропонованим технічним рішенням В основу винаходу поставлена задача створення підйомно-транспортного механізму, у якому за рахунок введення нових вузлів забезпечується виконання комплексу операцій по переміщенню лісоматеріалів Крім того, механізм забезпечує високу маневреність, жорсткість і несучу спроможність Поставлена задача вирішується тим, що механізм для підйомно-транспортних операцій складається з порталу обладнаного каретками для переміщення по рейковому шляху, на якому розташований візок з маніпулятором, що має можливість виконувати переміщення у напрямку перпендикулярному рейковим направляючим, згідно винаходу введено дві пари шарнірних опор СТІЙКІСТЬ механізму при максимально піднятому порталі і завантаженні маніпулятора забезпечується додатковим візком, який встановлений на механізмі переміщення 1 СО о> о (О 60937 Портал виконано у вигляді "U" подібної форми, що забезпечує переміщення привідного візка по направляючих розміщених у внутрішній частині порталу За рахунок об'єму, що утворюється твірними "U" подібного порталу, забезпечується розміщення привідного візка, а вільна частина використовується для короткотермінового розміщення і транспортування лісоматеріалів Суть винаходу пояснюється наступними кресленнями фіг 1 - загальний вигляд механізму для підйомно-транспорних операцій в переважаючому варіанті виконання, фіг 2 - принцип роботи запропонованого механізму Механізм для вантажно-транспортних операцій складається з порталу 1 (фіг 1), який виконано у вигляді "U" подібної форми Портал опирається на дві пари шарнірних опор 2, що з'єднані між собою за допомогою шарнірного з'єднання 3 та встановлені на ходових візках 4 механізму переміщення 5, який обладнаний додатковими візками 6 Опори 2 обладнані гідравлічним циліндром 7 для зміни висоти підйому порталу 1 В порталі 1 і механізмах переміщення 5 виконано направляючі для зміни положення опор 8 На порталі 1 встановлено привідний візок 9, який переміщується вздовж направляючих порталу перпендикулярно до руху механізму На привідному візку 9 встановлено поворотна платформа 10 з пдроприводом, кабіна оператора 11 і повнопривідний гідравлічний маніпулятор 12 обладнаний грейферним захоплювачем 13 Механізм для підйомно-транспорних операцій працює наступним чином (фіг 2) З метою виконання комплексу переміщувальних операцій круглих лісоматеріалів на нижньому Комп'ютерна верстка М Клюкш складі механізм для підиомно-транспортних операцій здійснює переміщення по рейкових направляючих 14 Для забезпечення безпечного проходження механізму над вагонами 15 широкої коли, за допомогою гідравлічних циліндрів 3, виконується підіймання порталу 1 на максимальну висоту За допомогою переміщення маніпулятора 12 обладнаного грейферним захоплювачем 13, поворотної платформи 9, привідного візка 8, механізму переміщення 5 виконується сортування сортиментів, штабелювання лісоматеріалів з лісонакопичувачів 16 у штабелі 17, відвантаження сортиментів з лісонакопичувачів 16 або штабелів 17 у вагони 15 При необхідності формування резервного або міжопераційного запасу 18, заданого якісними і КІЛЬКІСНИМИ показниками круглих лісоматеріалів, привідний візок 9 займає одне із крайніх положень на порталі 1, а вільна внутрішня частина порталу 1 "U" подібної форми використовується як буферний пристрій СТІЙКІСТЬ механізму при піднятому порталі 1 забезпечується додатковим візком 6 встановленому на механізмі переміщення 5 У випадках відсутності на складі вагонів 15 широкої коли, з метою зменшення тривалості циклу роботи по переміщенню круглих лісоматеріалів, гідравлічні циліндри 3 шарнірних опор 2 опускають портал 1 в крайнє нижнє положення Зміна положення шарнірних опор 2 забезпечується шарнірним з'єднанням і направляючими для зміни положення опори 2 виконаними в порталі 1 та механізму переміщення 5 На порталі 1 встановлюють датчики визначення наявності перешкод, при спрацюванні яких виконується миттєва зупинка механізму переміщення 5, що усуває виникнення аварійних ситуацій Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 5/02
Мітки: механізм, підйомно-транспортних, операцій
Код посилання
<a href="https://ua.patents.su/2-60937-mekhanizm-dlya-pidjjomno-transportnikh-operacijj.html" target="_blank" rel="follow" title="База патентів України">Механізм для підйомно-транспортних операцій</a>
Виносна опора підйомно-транспортного засобу

Номер патенту: 496
Опубліковано: 28.02.2000
Автори: Анохін Юрій Олександрович, Карпов Володимир Петрович, Омельченко Володимир Іванович, Комаров Олександр Федорович
МПК: B66C 23/78
Мітки: засобу, виносна, підйомно-транспортного, опора
Формула / Реферат:
Виносна опора підйомно-транспортного засобу, що містить відкидний башмак, шарнірно сполучений з рамою підйомно-транспортного засобу, п'яту з опорною поверхнею, шарнірно закріплену на відкидному башмаку, тягу, один кінець якої шарнірно сполучений з п'ятою, а другий сполучений з рамою підйомно-транспортного засобу, яка відрізняється тим, що опорна поверхня п'яти виконана криволінійною з можливістю перекочування п'яти при вивішуванні...
Підйомно-поворотні ворота

Номер патенту: 27094
Опубліковано: 28.02.2000
Автори: Пелах Юрій Ісаакович, Дудник Іван Володимирович
МПК: E06B 11/00
Мітки: підйомно-поворотні, ворота
Формула / Реферат:
1. Підйомно-поворотні ворота, що містять раму, стулку, обладнану встановленими на осях роликами, розміщеними у вертикальних напрямних стояків рами, противаги, гнучкими зв'язками з'єднані зі стулкою, і привід на відкривання та закривання стулки, які відрізняються тим, що у верхній частині стулки встановлені два кронштейни, кожен з яких несе вісь з роликом, рухомо розміщеним у горизонтальних напрямних, а гнучкі зв'язки виконані у вигляді...
Підйомно-поворотні ворота
Номер патенту: 48264
Опубліковано: 15.08.2002
Автор: Остапенко Олексій Васильович
МПК: E06B 11/00, E05F 15/10
Мітки: ворота, підйомно-поворотні
Формула / Реферат:
Підйомно-поворотні ворота, що містять стулку, розміщену між вертикальними стояками з можливістю зворотно-поступального переміщення і повороту, противаги і привід з вихідним валом, при цьому на кожному стояку у верхній частині консольно закріплена напрямна, що має горизонтальну ділянку, стулка має кронштейни, які встановлені консольно і містять ролики, взаємодіючі з напрямними, а противаги і стулка зв'язані між собою і з вихідним валом приводу...
Портативний хірургічний апарат для внутрішньосудинних операцій
Номер патенту: 219
Опубліковано: 31.08.1998
Автор: Криса Василь Михайлович
МПК: A61B 17/50, A61B 17/22
Мітки: хірургічний, портативний, операцій, внутрішньосудинних, апарат
Формула / Реферат:
Портативний хірургічний апарат для внутрішньосудинних операцій, що включає приводний механізм Із набором Інтімтромбекстракторів і джерело живлення, який відрізняється тим, що приводний механізм, виконаний у вигляді вібромеханічного механізму Із знімними наконечниками і зв'язаний через електромеханічний двигун з джерелом живлення, що є автономним, які розміщені в портативному корпусі рукоятці, на якому встановлений перемикач, при цьому...
Пристрій для мікрохірургічних операцій на клітинах
Номер патенту: 32869
Опубліковано: 15.02.2001
Автори: Лісін Вадим Іванович, Шигімага Віктор Олександрович, Безуглий Микола Дмитрович
МПК: C12M 3/00, G02B 21/00
Мітки: мікрохірургічних, клітинах, пристрій, операцій
Текст:
...залишаючи їх нерухомими в ході наведення мікроскопа на різкість. Поставлене завдання вирішується тим, що у відомому пристрої для мікрохірургічних операцій на клітинах, який містить інвертований мікроскоп, предметний столик та тримачі мікроінструменту, закріплені в маніпулятори, все установлено на віброгасячий плиті, згідно винаходу, мікроскоп установлено на платформі за допомогою пружинної підвіски, платформа закріплена на механізмі...
Попередній патент: Обприскувач опс-800 “богдан”
Наступний патент: Спосіб виготовлення замінника плазми крові
Випадковий патент: Спосіб розробки високообводненого нафтового покладу