Пристрій приведення гіростабілізованої платформи в горизонт
Номер патенту: 56111
Опубліковано: 15.04.2003
Автори: Задорожний Валерій Іванович, Голуб Олександр Григорович, Задорожний Юрій Івановіч, Задорожний Іван Степанович
Формула / Реферат
Пристрій приведення гіростабілізованої платформи в горизонт, що містить встановлений на платформі чутливий елемент - маятниковий акселерометр, гіроблок з датчиком кута і датчиком моменту двоступеневого гіроскопа, послідовно з'єднані підсилювач силової стабілізації, вхід якого з'єднано з датчиком кута гіроблока, двигун стабілізації з'єднаний через редуктор з платформою, блок формування сигналу керування, вхід якого з'єднано з виходом маятникового акселерометра і перетворювач код-аналог, вихід якого з'єднано з входом датчика моменту гіроблока, а вхід перетворювача код-аналог з'єднано з виходом блока формування сигналу керування, при цьому чутливий елемент - маятниковий акселерометр встановлено на гіростабілізованій платформі так, що його вісь чутливості збігається з напрямком місцевої вертикалі при установці платформи в горизонт, який відрізняється тим, що в нього додатково введені підсилювач, двопороговий компаратор, компаратор, електронний комутатор і суматор, причому вхід підсилювача з'єднано з виходом маятникового акселерометра, а входи двопорогового компаратора і компаратора з'єднані з виходом підсилювача, вихід двопорогового компаратора з'єднано з керуючим входом електронного комутатора, вихід компаратора з'єднано з аналоговим входом електронного комутатора, аналоговий вихід електронного комутатора з'єднано з першим входом суматора, вихід датчика кута прецесії двоступеневого гіроскопа з'єднано із другим входом суматора, а вихід суматора з'єднано з входом підсилювача стабілізації.
Текст
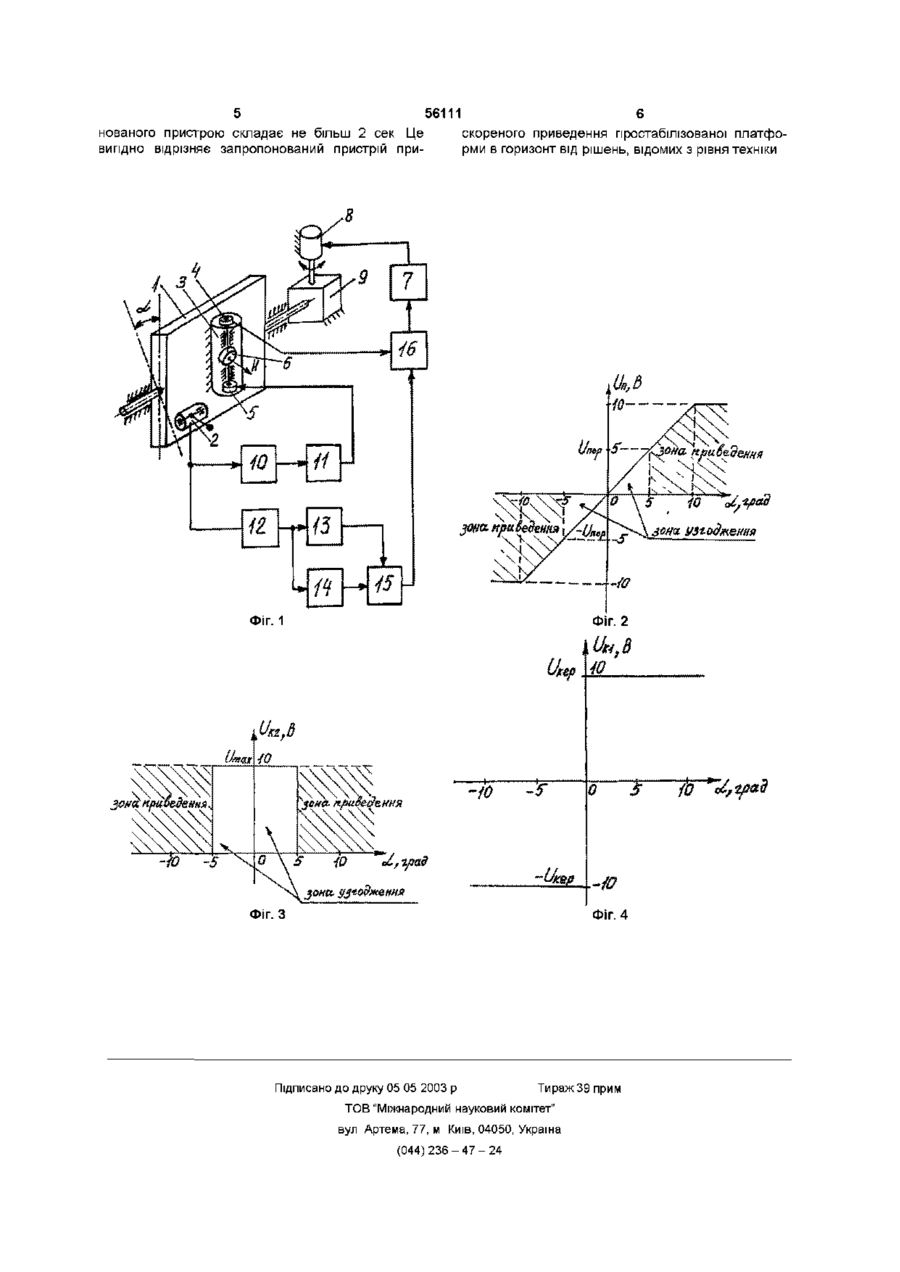
Пристрій приведення простабілізованої платформи в горизонт, що містить встановлений на платформі чутливий елемент - маятниковий акселерометр, проблок з датчиком кута і датчиком моменту двоступеневого гіроскопа, послідовно з'єднані підсилювач силової стабілізації, вхід якого з'єднано з датчиком кута проблока, двигун стабілізації з'єднаний через редуктор з платформою, блок формування сигналу керування, вхід якого з'єднано з виходом маятникового акселерометра і перетворювач код-аналог, вихід якого з'єднано з входом датчика моменту проблока, а вхід перетворювача код-аналог з'єднано з виходом блока (О ю 56111 тформи в горизонт Проплатформа приходить в горизонт зі швидкістю ВІДПОВІДНО до максимальної швидкості керування двоступеневого гіроскопа, що, як правило, не перевищує кілька градусів у секунду Обмеження швидкості приведення платформи в горизонт з боку гіроскопа є недоліком відомого пристрою В основу даного винаходу поставлена задача створити пристрій приведення простабілізованої платформи в горизонт зі збільшеною швидкістю приведення в горизонт і скороченим часом готовності Поставлена задача досягається тим, що в пристрої приведення простабілізованої платформи в горизонт, що містить встановлений на платформі чутливий елемент - маятниковий акселерометр, проблок з датчиком кута і датчиком моменту двоступеневого гіроскопа, послідовно з'єднані підсилювач силової стабілізації, вхід якого з'єднано з датчиком кута проблоку, двигун стабілізації з'єднаний через редуктор з платформою, блок формування сигналу керування, вхід якого з'єднано з виходом маятникового акселерометра і перетворювач код-аналог, вихід якого з'єднано з входом датчика моменту проблоку, а вхід перетворювача код-аналог з'єднано з виходом блоку формування сигналу керування, при цьому чутливий елемент маятниковий акселерометр встановлено на простабілізованій платформі так, що його вісь чутливості збігається з напрямком місцевої вертикалі при установці платформи в горизонт, згідно з винаходом, в нього додатково введені підсилювач, двопороговий компаратор, компаратор, електронний комутатор і суматор, причому, вхід підсилювача з'єднано з виходом маятникового акселерометра, а входи двопорогового компаратора і компаратора з'єднані з виходом підсилювача, вихід двопорогового компаратора з'єднано з керуючим входом електронного комутатора, вихід компаратора з'єднано з аналоговим входом електронного комутатора, аналоговий вихід електронного комутатора з'єднано з першим входом суматора, вихід датчика кута прецесії двоступеневого гіроскопа з'єднано із другим входом суматора, а вихід суматора з'єднано з входом підсилювача стабілізації Технічний результат, який досягається завдяки даному винаходу, полягає в збільшені швидкості приведення простабілізованої платформи в горизонт і скороченні часу готовності На Фіг 1 зображена функціональнокінематична схема пристрою прискореного приведення простабілізованої платформи в горизонт На Фіг 2, Фіг 3 і Фіг 4 зображені фрагменти залежності амплітуди вихідних сигналів підсилювача, двопорогового компаратора і компаратора кута відхилення платформи від напрямку площини горизонту Пристрій прискореного приведення простабілізованої платформи в горизонт включає платформу 1, чутливий елемент - маятниковий акселерометр 2, проблок 3 з датчиком кута 4 і датчиком моменту 5 двоступеневого гіроскопу 6, підсилювач стабілізації 7, двигун стабілізації 8, редуктор 9, блок формування сигнал керування 10, перетворювач код-аналог 11, підсилювач 12, двопорого вий компаратор 13, компаратор 14, електронний комутатор 15 і суматор 16 Пристрій прискореного приведення простабілізованої платформи в горизонт працює у такий спосіб При відхиленні платформи 1 від кута горизонту на кут (див Фіг1) сигнал з маятникового акселерометра 2, встановленого на простабілізованій платформі так, що його вісь чутливості збігається з напрямком місцевої вертикалі при установці платформи 1 в горизонт, надходить на датчик моменту 5 гіроскопу 6 через з'єднані послідовно блок формування сигналу керування 10 і перетворювач код-аналог 11, а також одночасно на вхід підсилювача 12, що підсилює сигнал з акселерометра до необхідного рівня Посилений сигнал з підсилювача 12 надходить на двопороговий компаратор 13 і на компаратор 14 Двопороговий компаратор 13 виконує функцію аналізатора помилки неузгодженості положення платформи 1 з горизонтом і настроюється на поріг спрацьовування ВІДПОВІДНОГО сигналу з акселерометра 2 у кількакутових градусів Компаратор 14 формує напругу визначеної полярності в залежності від сигналу з акселерометра 2 При великих кутах відхилення платформи 1 від горизонту спрацьовує електронний комутатор 15,'керуючий вхід якого підключений до входу двопорогового компаратора 13, і сигнал з компаратора 14 надходить через електронний комутатор 15 на суматор 16, а з виходу суматора 16 на підсилювач стабілізації 7 і двигун стабілізації 8 При цьому приведення простабілізованої платформи 1 в горизонт відбувається зі швидкістю, яка в кілька разів перевищує швидкість приведення, сформовану проблоком 3 (від датчика моменту 5 гіроскопа 6) Швидкість приведення платформи в горизонт при великих кутах неузгодженості можна виразити таким чином Юпр = 001 + «2, де соїн - сумарна швидкість приведення, сої - швидкість приведення проблоком 3 (від датчика моменту 5 гіроскопа 6), юг - швидкість приведення двигуном стабілізації 8 В процесі приведення платформи 1 в горизонт з зони приведення в зону узгодження напруга з підсилювача 12 (Фіг 2) зменшується При досягненні граничного значення напруги UnOp відповідному границі зон приведення й узгодження спрацьовує двопороговий компаратор 13 (ФігЗ), що подає сигнал max на електронний комутатор 15 для відключення керуючого сигналу Uynp, що надходить з виходу компаратор 14 (Фіг 4) на вхід суматора 16 При цьому швидкість приведення платформи 1 буде мати вираз СО'їн = 001 Зі ШВИДКІСТЮ ооІ платформа проходить зону узгодження, що відповідає декільком кутовим градусам Тому що реально швидкість а>2 більше швидкості ооі У 3 -ь 4 рази, то в підсумку швидкість приведення простабілізованої платформи в горизонт збільшується в 4 v 5 разів Час готовності пристрою зазначеного прототипу при приведенні платформи з максимального кута неузгодженості (а = 90°) - не менш 10 сек, а час готовності пропо 5 56111 6 нованого пристрою складає не більш 2 сек Це скореного приведення гіростабілізованої платфовипдно відрізняє запропонований пристрій прирми в горизонт від рішень, відомих з рівня техніки Фіг. 1 Urn 40 О -10 \ 40 -5 •Uk kep Фіг. З Фіг. 4 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 J 10
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for horizontally positioning a gyroscope-stabilized platform
Автори англійськоюZadorozhnyi Valerii Ivanovych, Holub Oleksandr Hryhorovych
Назва патенту російськоюУстройство для установки гиростабилизированной платформы в горизонтальное положение
Автори російськоюЗадорожный Валерий Иванович, Голуб Александр Григорьевич
МПК / Мітки
МПК: G01C 21/10
Мітки: горизонт, приведення, пристрій, платформи, гіростабілізованої
Код посилання
<a href="https://ua.patents.su/3-56111-pristrijj-privedennya-girostabilizovano-platformi-v-gorizont.html" target="_blank" rel="follow" title="База патентів України">Пристрій приведення гіростабілізованої платформи в горизонт</a>
Гіростабілізатор

Номер патенту: 56098
Опубліковано: 15.04.2003
Автори: Голуб Олександр Григорович, Задорожний Іван Степанович, Задорожний Валерій Іванович, Задорожний Юрій Івановіч
МПК: G01C 21/10
Мітки: гіростабілізатор
Формула / Реферат:
1. Гіростабілізатор, що містить платформу, встановлений на платформі гіроблок з датчиком кута і датчиком моменту двоступеневого гіроскопа, послідовно сполучені підсилювач силової стабілізації, вхід якого сполучений з датчиком кута гіроблока, і двигун стабілізації, сполучений через редуктор з платформою, встановлений на платформі маятниковий акселерометр і послідовно сполучені блок форматування сигналу керування, вхід якого сполучений з...
Система керування положенням платформи
Номер патенту: 48332
Опубліковано: 15.08.2002
Автори: Лещенко В'ячеслав Михайлович, Безлепкін Олександр Андрійович, Васильченков Олег Георгійович, Бусяк Юрій Митрофанович, Магерамов Лютфалій Курбан-Алієвич, Качанов Петро Олексійович, Наплеков Михайло Іванович, Ребров Олексій Анатолійович, Головіна Олена Василівна, Смоляков Василь Андрійович
МПК: G05D 1/08
Мітки: положенням, керування, платформи, система
Формула / Реферат:
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора i за допомогою кривошипно-шатунного механізму з'єднаний із платформою, причому до другого i третього входів цифрового регулятора відповідно...
Пристрій корекції амплітуд імпульсів
Номер патенту: 22369
Опубліковано: 03.03.1998
Автори: Рожанківський Ігор Володимирович, Погрібний Володимир Олександрович, Таянов Сергій Анатолійович
МПК: G01R 29/02
Мітки: амплітуд, імпульсів, корекції, пристрій
Формула / Реферат:
Пристрій корекції амплітуд Імпульсів, що містить блок віднімання та перший одновібратор, який відрізняється тим, що в нього введені піковий детектор, визначник мінімуму, два компаратори, другий одновібратор та формувач Імпульсів, причому вихід пікового детектора з'єднаний з першим входом першого компаратора, другим входом формувача Імпульсів та другим входом блоку віднімання, вихід якого є виходом пристрою, вихід першого компаратора з'єднаний...
Пристрій для автоматичного контролю потенціалу корпуса електроустановки відносно землі

Номер патенту: 52144
Опубліковано: 16.12.2002
Автор: Панкратов Анатолій Іванович
МПК: H02H 3/14
Мітки: контролю, потенціалу, землі, пристрій, електроустановки, корпуса, відносної, автоматичного
Формула / Реферат:
1. Пристрій для автоматичного контролю потенціалу корпуса електроустановки відносно землі, що містить генератор, підключений між корпусом електроустановки і датчиком потенціалу, перший підсилювач, перший вхід якого через фільтр низьких частот підключений між виходом датчика потенціалу і клемою для підключення до корпуса електроустановки, а вихід - до першого входу компаратора, вихід якого з'єднаний із входом виконавчого органа, другий...
Пристрій для кріплення котла залізничної цистерни на рамі платформи
Номер патенту: 50977
Опубліковано: 15.11.2002
Автори: Зубань Олександр Трохимович, Зубань Олег Олександрович, Зубань Володимир Трохимович
МПК: B61D 5/00
Мітки: рами, платформи, пристрій, котла, кріплення, залізничної, цистерни
Формула / Реферат:
Пристрій для кріплення котла залізничної цистерни, що містить раму зі стійками, основу і встановлені на стійках кронштейни з хомутами, що охоплюють котел, і зв'язані з кронштейнами за допомогою кріпильних елементів, який відрізняється тим, що пристрій оснащений фіксаторами хомутів від повороту навколо своєї подовжньої осі з можливістю їхнього подовжнього переміщення.
Попередній патент: Спосіб отримання вапняково-аміачної селітри
Наступний патент: Спосіб виготовлення мозаїчної плитки лицювальної
Випадковий патент: Ґрунтообробний пристрій