Передача пілот-сигналу в системі бездротового зв’язку
Номер патенту: 98635
Опубліковано: 11.06.2012
Автори: Горохов Алєксєй, Пракаш Раджат, Кхандекар Аамод, Борран Мохаммад Дж.
Формула / Реферат
1. Пристрій для бездротового зв'язку, який містить:
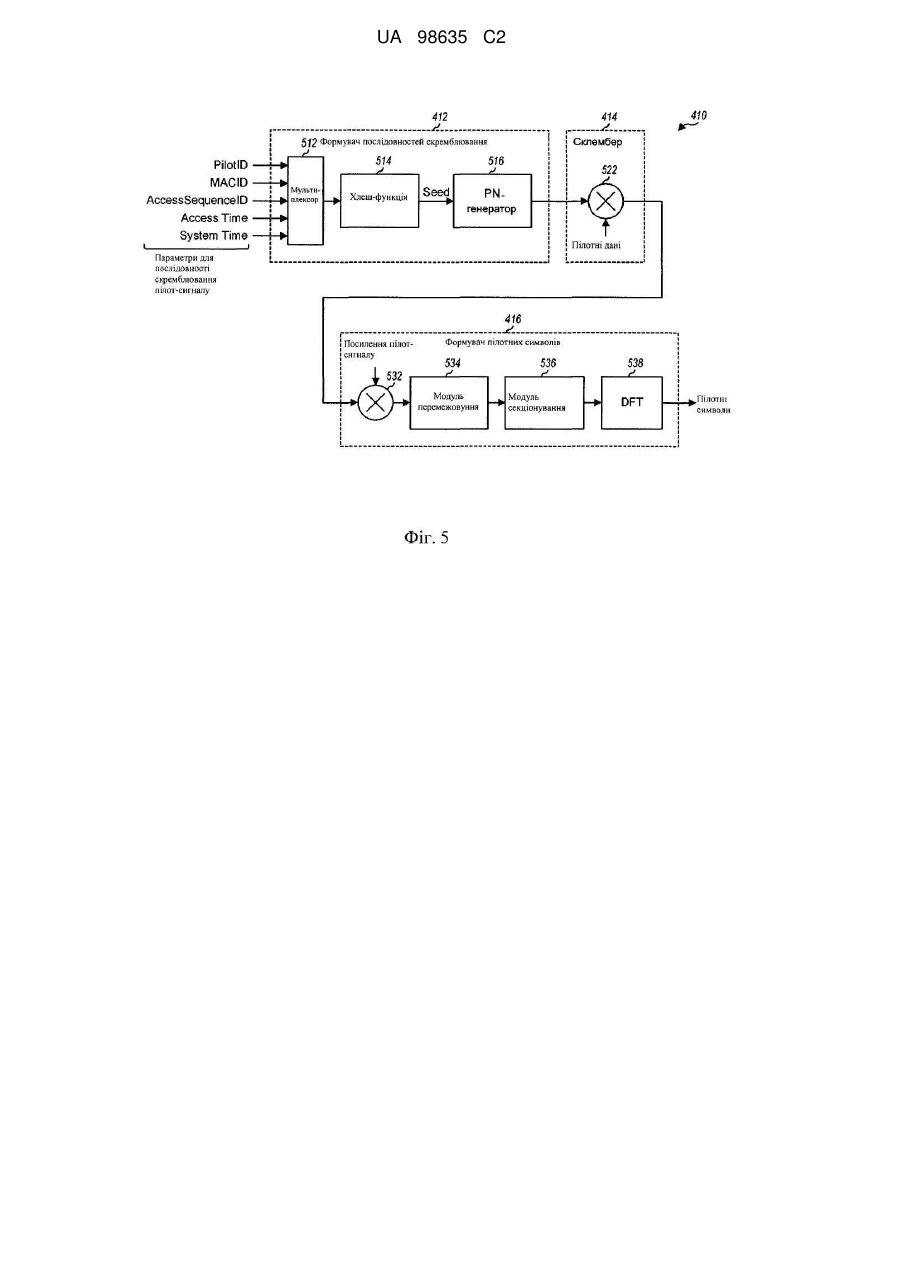
щонайменше один процесор, виконаний з можливістю формувати послідовність скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр, формувати пілот-сигнал на основі послідовності скремблювання і передавати пілот-сигнал з термінала щонайменше в один сектор; і
запам'ятовуючий пристрій, з'єднаний щонайменше з одним процесором.
2. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю хешувати набір параметрів, щоб одержувати початкове число, і формувати послідовність скремблювання на основі початкового числа.
3. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю скремблювати пілотні дані за допомогою послідовності скремблювання, щоб одержувати скрембльовані пілотні дані, формувати пілотні символи на основі скрембльованих пілотних даних і відображати пілотні символи в частотно-часовий блок, який використовується для передачі пілот-сигналу.
4. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю формувати початкове число на основі набору параметрів і формувати послідовність скремблювання на основі цього початкового числа.
5. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю формувати пілот-сигнал додатково на основі пілотних даних, які містять ортогональну послідовність, і передавати пілот-сигнал в частотно-часовому блоці для субсегмента множинного доступу з кодовим розділенням (CDMA), який використовується декількома терміналами для передачі пілот-сигналу по зворотній лінії зв'язку.
6. Пристрій за п. 1, в якому щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку для термінала.
7. Пристрій за п. 1, в якому щонайменше один статичний параметр містить параметр, який є незалежним від обслуговуючого сектора для термінала.
8. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю одержувати щонайменше один статичний параметр після завершення початкового доступу до системи за допомогою термінала.
9. Пристрій за п. 1, в якому щонайменше один статичний параметр містить ідентифікатор (ID) сектора, до якого спочатку здійснює доступ термінал, або ідентифікатор, призначений терміналу сектором початкового доступу, або індекс послідовності доступу, який використовується терміналом для початкового доступу до системи, або час початкового доступу термінала до системи, або їх комбінацію.
10. Пристрій за п. 1, в якому щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку для термінала.
11. Пристрій за п. 1, в якому щонайменше один динамічний параметр містить параметр для системного часу.
12. Пристрій за п. 11, в якому параметр для системного часу містить індекс суперкадру для суперкадру, в якому передається пілот-сигнал.
13. Пристрій за п. 11, в якому параметр для системного часу містить індекс кадру для кадру, в якому передається пілот-сигнал.
14. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю приймати команду керування потужністю (PC) від обслуговуючого сектора для термінала, причому PC-команда визначається на основі пілот-сигналу, і регулювати потужність передачі термінала на основі цієї РС-команди.
15. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю приймати індикатор якості пілот-сигналу (PQI) від кожного з щонайменше одного сектора, причому PQI від кожного сектора визначається на основі пілот-сигналу, і вибирати один з щонайменше одного сектора як обслуговуючий сектор для термінала на основі PQI, прийнятого від кожного з щонайменше одного сектора.
16. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю виконувати передачу обслуговування від поточного обслуговуючого сектора в новий обслуговуючий сектор і використовувати набір параметрів для формування послідовності скремблювання для пілот-сигналу, який передається в новий обслуговуючий сектор.
17. Спосіб бездротового зв'язку, який включає етапи, на яких:
формують послідовність скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр;
формують пілот-сигнал на основі послідовності скремблювання; і
передають пілот-сигнал з термінала в щонайменше один сектор.
18. Спосіб за п. 17, в якому формування послідовності скремблювання включає етапи, на яких:
формують початкове число на основі набору параметрів; і
формують послідовність скремблювання на основі початкового числа.
19. Спосіб за п. 17, в якому щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку для термінала, і щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку.
20. Спосіб за п. 17, в якому щонайменше один динамічний параметр містить параметр для системного часу.
21. Пристрій для бездротового зв'язку, який містить:
засіб формування послідовності скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр;
засіб формування пілот-сигналу на основі послідовності скремблювання; і
засіб передачі пілот-сигналу з термінала в щонайменше один сектор.
22. Пристрій за п. 21, в якому щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку для термінала, і щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку.
23. Пристрій за п. 21, в якому засіб формування послідовності скремблювання містить:
засіб формування початкового числа на основі набору параметрів; і
засіб формування послідовності скремблювання на основі початкового числа.
24. Машиночитаний носій, який містить збережену на ньому комп'ютерну програму, причому програма містить:
код для спонукання щонайменше одного комп'ютера формувати послідовність скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр;
код для спонукання щонайменше одного комп'ютера формувати пілот-сигнал на основі послідовності скремблювання; і
код для спонукання щонайменше одного комп'ютера передавати пілот-сигнал з термінала в щонайменше один сектор.
25. Пристрій для бездротового зв'язку, який містить:
щонайменше один процесор, виконаний з можливістю приймати пілот-сигнал від термінала, формувати послідовність скремблювання для термінала на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр, і дескремблювати пілот-сигнал, який приймається за допомогою послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал для термінала; і
запам'ятовуючий пристрій, з'єднаний щонайменше з одним процесором.
26. Пристрій за п. 25, в якому щонайменше один процесор виконаний з можливістю формувати початкове число на основі набору параметрів і формувати послідовність скремблювання на основі початкового числа.
27. Пристрій за п. 25, в якому щонайменше один динамічний параметр містить параметр для системного часу.
28. Пристрій за п. 25, в якому щонайменше один статичний параметр містить ідентифікатор (ID) сектора, до якого спочатку здійснює доступ термінал, або ідентифікатор, призначений терміналу сектором первинного доступу, або індекс послідовності доступу, який використовується терміналом для початкового доступу до системи, або час початкового доступу термінала до системи, або їх комбінацію.
29. Пристрій за п. 25, в якому щонайменше один процесор виконаний з можливістю визначати інтенсивність пілот-сигналу, який приймається для термінала, на основі дескрембльованого пілот-сигналу, формувати індикатор якості пілот-сигналу (PQI) на основі інтенсивності пілот-сигналу, який приймається, і відправляти PQI в термінал.
30. Пристрій за п. 25, в якому щонайменше один процесор виконаний з можливістю визначати якість сигналів, які приймаються для термінала, на основі дескрембльованого пілот-сигналу, формувати команду керування потужністю (PC) на основі якості сигналів, які приймаються, і відправляти PC-команду в термінал.
31. Спосіб бездротового зв'язку, який включає етапи, на яких:
приймають пілот-сигнал від термінала;
формують послідовність скремблювання для термінала на основі набору параметрів,який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр; і
дескремблюють пілот-сигнал, який приймається за допомогою послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал для термінала.
32. Спосіб за п. 31, в якому формування послідовності скремблювання включає етапи, на яких:
формують початкове число на основі набору параметрів; і
формують послідовність скремблювання на основі початкового числа.
33. Спосіб за п. 31, в якому щонайменше один динамічний параметр містить параметр для системного часу.
34. Пристрій для бездротового зв'язку, який містить:
щонайменше один процесор, виконаний з можливістю формувати першу послідовність скремблювання на основі першого набору параметрів, формувати пілот-сигнал на основі першої послідовності скремблювання, щоб передавати пілот-сигнал щонайменше в один сектор, який включає в себе обслуговуючий сектор для термінала, формувати другу послідовність скремблювання на основі другого набору параметрів, скремблювати дані трафіку на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку, і передавати скрембльовані дані трафіку в обслуговуючий сектор; і
запам'ятовуючий пристрій, з'єднаний з щонайменше одним процесором.
35. Пристрій за п. 34, в якому щонайменше один процесор виконаний з можливістю формувати перше початкове число на основі першого набору параметрів, формувати першу послідовність скремблювання на основі першого початкового числа, формувати друге початкове число на основі другого набору параметрів і формувати другу послідовність скремблювання на основі другого початкового числа.
36. Пристрій за п. 34, в якому перший набір містить щонайменше один параметр, незалежний від обслуговуючого сектора, і в якому другий набір містить щонайменше один параметр, залежний від обслуговуючого сектора.
37. Пристрій за п. 34, в якому щонайменше один з першого і другого наборів містить параметр для системного часу.
38. Пристрій за п. 37, в якому параметр для системного часу містить індекс суперкадру для суперкадру, в якому передається пілот-сигнал або дані трафіку, або індекс кадру для кадру, в якому передається пілот-сигнал, або дані трафіку, або їх обидва.
39. Пристрій за п. 34, в якому перший набір параметрів містить ідентифікатор (ID) сектора, до якого спочатку здійснює доступ термінал, або ідентифікатор, призначений терміналу за допомогою сектора початкового доступу, або індекс послідовності доступу, який використовується терміналом для початкового доступу до системи, або час початкового доступу термінала до системи, або їх комбінацію.
40. Пристрій за п. 34, в якому другий набір параметрів містить ідентифікатор обслуговуючого сектора або ідентифікатор, призначений терміналу обслуговуючим сектором, або їх обидва.
41. Спосіб бездротового зв'язку, який включає етапи, на яких:
формують першу послідовність скремблювання на основі першого набору параметрів;
формують пілот-сигнал на основі першої послідовності скремблювання;
передають пілот-сигнал в щонайменше один сектор, який включає в себе обслуговуючий сектор для термінала;
формують другу послідовність скремблювання на основі другого набору параметрів;
скремблюють дані трафіку на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку; і
передають скрембльовані дані трафіку в обслуговуючий сектор.
42. Спосіб за п. 41, в якому формування першої послідовності скремблювання включає етапи, на яких формують перше початкове число на основі першого набору параметрів і формують першу послідовність скремблювання на основі першого початкового числа; і
в якому формування другої послідовності скремблювання включає етапи, на яких формують друге початкове число на основі другого набору параметрів і формують другу послідовність скремблювання на основі другого початкового числа.
43. Спосіб за п. 41, в якому щонайменше один з першого і другого наборів містить параметр для системного часу.
44. Пристрій для бездротового зв'язку, який містить:
щонайменше один процесор, виконаний з можливістю приймати пілот-сигнал від термінала, формувати першу послідовність скремблювання на основі першого набору параметрів, дескремблювати пілот-сигнал, який приймається за допомогою першої послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал, приймати дані трафіку від термінала, формувати другу послідовність скремблювання на основі другого набору параметрів, і дескремблювати дані трафіку, які приймаються за допомогою другої послідовності скремблювання, щоб одержувати дескрембльовані дані трафіку; і
запам'ятовуючий пристрій, з'єднаний з щонайменше одним процесором.
45. Пристрій за п. 44, в якому щонайменше один процесор виконаний з можливістю формувати перше початкове число на основі першого набору параметрів, формувати першу послідовність скремблювання на основі першого початкового числа, формувати друге початкове число на основі другого набору параметрів і формувати другу послідовність скремблювання на основі другого початкового числа.
46. Пристрій за п. 44, в якому перший набір містить щонайменше один параметр, незалежний від обслуговуючого сектора для термінала, і в якому другий набір містить щонайменше один параметр, залежний від обслуговуючого сектора.
47. Пристрій за п. 44, в якому щонайменше один з першого і другого наборів містить параметр для системного часу.
48. Спосіб бездротового зв'язку, який включає етапи, на яких:
приймають пілот-сигнал від термінала;
формують першу послідовність скремблювання на основі першого набору параметрів;
дескремблюють пілот-сигнал, який приймається за допомогою першої послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал;
приймають дані трафіку від термінала;
формують другу послідовність скремблювання на основі другого набору параметрів; і
дескремблюють дані трафіку, які приймаються за допомогою другої послідовності скремблювання, щоб одержувати дескрембльовані дані трафіку.
49. Спосіб за п. 48, в якому формування першої послідовності скремблювання включає етапи, на яких формують перше початкове число на основі першого набору параметрів і формують першу послідовність скремблювання на основі першого початкового числа; і
в якому формування другої послідовності скремблювання включає етапи, на яких формують друге початкове число на основі другого набору параметрів і формують другу послідовність скремблювання на основі другого початкового числа.
Текст
Реферат: Описані способи передачі пілот-сигналу і даних трафіку. В одному аспекті, термінал може скремблювати свій пілот-сигнал за допомогою послідовності скремблювання, сформованої на основі набору статичних і динамічних параметрів. Статичний(і) параметр(и) має(ють) фіксоване значення для всього сеансу зв'язку для термінала. Динамічний(і) параметр(и) має(ють) змінне значення під час сеансу зв'язку. Термінал може формувати послідовність скремблювання за допомогою хешування набору параметрів, щоб одержувати початкове число, та ініціалізації PNгенератора за допомогою початкового числа. Термінал потім може формувати пілот-сигнал на основі послідовності скремблювання. В іншому аспекті, термінал може використовувати різні послідовності скремблювання для пілот-сигналу і даних трафіку. Перша послідовність скремблювання може бути сформована на основі першого набору параметрів і використана для формування пілот-сигналу. Друга послідовність скремблювання може бути сформована на основі другого набору параметрів і використана для скремблювання даних трафіку. UA 98635 C2 (12) UA 98635 C2 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 Дана заявка заявляє пріоритет попередньої заявки на патент США порядковий номер 60/883758, озаглавленої "WIRELESS COMMUNICATION SYSTEM", поданої 5 січня 2007 року, попередньої заявки на патент США порядковий номер 60/883870, озаглавленої "PILOT SIGNAL TRANSMISSION FOR A WIRELESS COMMUNICATION SYSTEM", поданої 8 січня 2007 року, і попередньої заявки на патент США порядковий номер 60/883982, озаглавленої "PILOT SIGNAL TRANSMISSION FOR A WIRELESS COMMUNICATION SYSTEM", поданої 8 січня 2007 року, що переуступлені правонаступнику цієї заявки і включені в даний документ за допомогою посилання. Дане розкриття стосується, загалом, зв'язку, а більш конкретно, методів передачі пілотсигналу в системі бездротового зв'язку. Системи бездротового зв'язку широко застосовуються для того, щоб надавати різні послуги зв'язку, наприклад, передачу мови, відео, пакетних даних, обмін повідомленнями, широкомовну передачу тощо. Ці бездротові системи можуть бути системами множинного доступу, що допускають підтримку декількох користувачів за допомогою спільного використання доступних системних ресурсів. Приклади таких систем множинного доступу містять у собі системи множинного доступу з кодовим розділенням (CDMA), системи множинного доступу з часовим розділенням (TDMA), системи множинного доступу з частотним розділенням (FDMA), системи з ортогональним FDMA (OFDMA) і системи FDMA з однією несучою (SC-FDMA). Система бездротового зв'язку може включати в себе множину базових станцій, які підтримують зв'язок для множини терміналів по прямій і зворотній лініях зв'язку. Пряма лінія зв'язку (або низхідна лінія зв'язку) відноситься до лінії зв'язку від базових станцій до терміналів, а зворотна лінія зв'язку (або висхідна лінія зв'язку) відноситься до лінії зв'язку від терміналів до базових станцій. Термінали можуть знаходитися в будь-якому місці в рамках системи, і кожен термінал може бути в рамках покриття нуля, однієї або декількох базових станцій у будь-який даний момент. Термінал може передавати пілот-сигнал по зворотній лінії зв'язку, щоб давати можливість базовим станціям виявляти термінал. Пілот-сигнал також може використовуватися для того, щоб оцінювати характеристики каналу для термінала, призначати термінал відповідній базовій станції, яка може ефективно обслуговувати термінал, і/або в інших цілях. Пілот-сигнал, переданий за допомогою термінала, хоча є корисним, представляє непродуктивні витрати при передачі. Отже, у даній галузі техніки є потреба в методах для того, щоб ефективно передавати пілотсигнал по зворотній лінії зв'язку. Способи для передачі пілот-сигналу і даних трафіку за допомогою термінала по зворотній лінії зв'язку описуються в даному документі. В одному аспекті, термінал може скремблювати свій пілот-сигнал за допомогою послідовності скремблювання, сформованої на основі набору параметрів, які можуть включати в себе щонайменше один статичний параметр і можливо щонайменше один динамічний параметр. Щонайменше один статичний параметр може мати фіксоване значення для всього сеансу зв'язку для термінала, може бути визначений під час початкового доступу до системи за допомогою термінала і може бути незалежним від обслуговуючого сектора для термінала. Щонайменше, один динамічний параметр може мати змінне значення під час сеансу зв'язку і може включати в себе параметр для системного часу. Послідовність скремблювання може бути сформована на основі набору параметрів, наприклад, за допомогою хешування набору параметрів, щоб одержувати початкове число, і наступної ініціалізації формувача псевдовипадкових чисел (PN) за допомогою початкового числа. Пілотсигнал потім може формуватися на основі послідовності скремблювання, наприклад, за допомогою скремблювання пілотних даних за допомогою послідовності скремблювання, щоб одержувати скрембльовані пілотні дані, і наступного формування пілотних символів на основі скрембльованих пілотних даних. В іншому аспекті, термінал може використовувати різні послідовності скремблювання для пілот-сигналу і даних трафіку. Перша послідовність скремблювання може бути сформована на основі першого набору параметрів. Пілот-сигнал може формуватися на основі першої послідовності скремблювання і може передаватися щонайменше в один сектор, включаючи обслуговуючий сектор. Друга послідовність скремблювання може бути сформована на основі другого набору параметрів. Дані трафіку можуть бути скрембльовані на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку, які можуть бути відправлені в обслуговуючий сектор. Перший набір може включати в себе щонайменше один параметр, незалежний від обслуговуючого сектора. Другий набір може включати в себе щонайменше один параметр, що залежить від обслуговуючого сектора. Перший і другий набори можуть включати в себе динамічний параметр, наприклад, параметр для системного часу. Далі більш докладно описані різні аспекти та ознаки винаходу. 1 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 Короткий опис креслень Фіг.1 ілюструє систему бездротового зв'язку. Фіг.2 показує структуру суперкадру для зворотної лінії зв'язку. Фіг.3 показує блок-схему термінала і двох секторів/базових станцій. Фіг.4 показує блок-схему процесора передачі. Фіг.5 показує блок-схему процесора пілот-сигналу передачі (ТХ). Фіг.6 показує блок-схему процесора прийому. Фіг.7 показує процес для передачі пілот-сигналу за допомогою термінала. Фіг.8 показує пристрій для передачі пілот-сигналу. Фіг.9 показує процес для прийому пілот-сигналу за допомогою сектора/базової станції. Фіг.10 показує пристрій для прийому пілот-сигналу. Фіг.11 показує процес для передачі пілот-сигналу і даних трафіку за допомогою термінала. Фіг.12 показує пристрій для передачі пілот-сигналу і даних трафіку. Фіг.13 показує процес для прийому пілот-сигналу і даних трафіку за допомогою сектора. Фіг.14 показує пристрій для прийому пілот-сигналу і даних трафіку. Фіг.1 показує систему 100 бездротового зв'язку з декількома базовими станціями. Бездротова система також може згадуватися як мережа доступу (AN). Терміни "система" і "мережа" найчастіше використовуються взаємозамінно. Для простоти, тільки три базових станції 110, 112 та 114 показані на Фіг.1. Базова станція - це станція, яка обмінюється даними з терміналами. Базова станція також може згадуватися як точка доступу (АР), вузол В, удосконалений вузол В тощо. Кожна базова станція надає покриття зв'язку для конкретної географічної зони. Термін "стільник" може відноситися до базової станції і/або її зоні покриття, залежно від контексту, в якому використовується термін. Щоб підвищувати пропускну здатність системи, зона покриття базової станції може бути секціонована на декілька (наприклад, три) менших зон. Кожна менша ділянка може бути обслугована за допомогою відповідної підсистеми базової станції. Термін "сектор" може стосуватися найменшої зони покриття базової станції і/або підсистеми базової станції, що обслуговує цю зону покриття. Методи, описані в даному документі, можуть бути використані для системи із секторизованими стільниками, а також для системи з несекторизованими стільниками. Для простоти, методи описуються нижче для системи із секторизованими стільниками. У наступному описі, терміни "сектор" і "базова станція" використовуються взаємозамінно. Базові станції 110, 112 та 114 відповідають секторам А, В та С, відповідно. Для централізованої архітектури, системний контролер 130 може підключатися до базових станцій і надавати координацію і керування для цих базових станцій. Системний контролер 130 може бути одним мережним об'єктом або набором мережних об'єктів. У розподіленій архітектурі, базові станції можуть обмінюватися даними одна з одною у міру необхідності. Термінал 120 може знаходитися в будь-якому місці в системі і може бути стаціонарним або мобільним. Термінал 120 також може згадуватися як термінал доступу (AT), мобільна станція, користувацьке обладнання, абонентський модуль, станція тощо. Терміналом 120 може бути стільниковий телефон, персональний цифровий пристрій (PDA), пристрій бездротового зв'язку, бездротовий модем, кишеньковий пристрій, портативний комп'ютер, бездротовий телефон тощо. Термінал 120 може обмінюватися даними з нулем, одним або декількома секторами по прямій і/або зворотній лінії зв'язку в будь-який даний момент. Термінал 120 може мати обслуговуючий сектор, призначений для того, щоб обслуговувати термінал по прямій і/або зворотній лінії зв'язку. Термінал 120 також може мати активний набір, який містить сектори, які можуть мати можливість обслуговувати термінал. У прикладі, показаному на Фіг.1, сектор А - це обслуговуючий сектор для термінала 120, а сектори В та С знаходяться в активному наборі термінала 120. Методи, описані в даному документі, можуть використовуватися для різних систем бездротового зв'язку, таких як системи CDMA, TDMA, FDMA, OFDMA та SC-FDMA. Система CDMA може реалізувати таку технологію радіозв'язку, як cdma2000, універсальний наземний радіодоступ (UTRA) тощо. OFDMA-система може реалізувати таку технологію радіозв'язку, як надширокосмугова передача для мобільних пристроїв (UMB), удосконалений UTRA (E-UTRA), IEEE 802.11, IEEE 802.16, IEEE 802.20, Flash-OFDM® тощо. UTRA та E-UTRA описуються в документах від організації, яку називають Партнерським проектом третього покоління (3GPP). Cdma2000 та UMB описуються в документах від організації, яку називають Партнерським проектом третього покоління 2 (3GPP2). Ці різні технології радіозв'язку і стандарти відомі в даній галузі техніки. Для простоти, визначені аспекти методик описуються нижче для UMB, і термінологія UMB використовується в більшій частині нижченаведеного опису. UMB використовує комбінацію 2 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 мультиплексування з ортогональним частотним розділенням каналів (OFDM) і мультиплексування з кодовим розділенням каналів (CDM). UMB описується в 3GPP2 C.S0084001, озаглавленому "Physical Layer for Ultra Mobile Broadband (UMB) Air Interface Specification", і 3GPP2 C.S0084-002, озаглавленому "Medium Access Control Layer For Ultra Mobile Broadband (UMB) Air Interface Specification", обидва з яких датовані серпнем 2007 року і є загальнодоступними. Фіг.2 показує схему структури 200 суперкадру, яка може використовуватися для зворотної лінії зв'язку. Часова шкала передачі може бути секціонована в одиницях кадрів. Кожен суперкадр може охоплювати конкретну тривалість, яка може бути фіксованою або конфігурованою. Кожен суперкадр може бути розділений на F кадрів фізичного рівня (PHY), де, загалом, F≥1. В одній схемі, F=25, і 25 кадрам PHY у кожнім суперкадрі призначаються індекси від 0 до 24. Кожен кадр PHY може покривати N періодів OFDM-символу, де, загалом, N≥1 і в одній схемі N=8. Фіг.2 також показує структуру піднесучої. Ширина смуги системи може бути розділена на декілька (К) ортогональних піднесучих, які також можуть згадуватися як тони, елементи розрізнення тощо. Рознесення між суміжними піднесучими може бути фіксованим, і кількість піднесучих може залежати від ширини смуги системи. Наприклад, може бути 128, 256, 512, 1024 або 2048 або піднесучих для ширини смуги системи у 1,25, 2,5, 5, 10 або 20 Мгц, відповідно. Фіг.2 також показує схему сегмента CDMA, який може підтримувати передачу пілот-сигналу, службових сигналів і деяких даних трафіку по зворотній лінії зв'язку. Сегмент CDMA може підтримувати різні канали, такі як, наприклад, зворотний пілотний канал (R-PICH), зворотний виділений канал керування CDMA (R-CDCCH), зворотний канал доступу (R-ACH), зворотний канал передачі даних CDMA (R-CDCH) тощо. Сегмент CDMA може займати блок частотно-часових ресурсів, який може мати будь-який розмір. В одній схемі, сегмент CDMA включає в себе S субсегментів CDMA, де, загалом, S≥1. Кожен субсегмент CDMA може покривати М суміжних піднесучих у N періодах OFDM-символу і може включати в себе L=M*N одиниць (блоків) передачі. Блок передачі може відповідати одній піднесучій в один період OFDM-символу. В одній схемі, кожен субсегмент CDMA покриває 128 суміжних піднесучих у 8 періодах OFDM-символу одного кадру PHY і включає в себе 1024 блоків передачі. Сегмент і субсегмент CDMA також можуть мати інші розміри. У схемі, показаній на Фіг.2, сегмент CDMA відправляється в кожних Q кадрах PHY, де, загалом, Q≥1 і, як деякі приклади, Q=4, 6, 8 тощо. Сегмент CDMA може перескакувати по ширині смуги системи від кадру CDMA до кадру CDMA (як показано на фіг.2) або може передаватися по фіксованому набору піднесучих (не показано на Фіг.2). Кадр CDMA - це кадр PHY, в якому відправляється сегмент CDMA. Загалом, сегмент CDMA може відправлятися на будь-якій швидкості в частотно-часовому блоці будь-якого розміру. Кілька терміналів можуть спільно використовувати сегмент CDMA для пілот-сигналу, службових сигналів тощо. Це може бути більш ефективним, ніж призначення виділених частотно-часових ресурсів кожному терміналу для відправлення пілот-сигналу і службових сигналів по зворотній лінії зв'язку. В одному аспекті, термінал 120 може передавати пілот-сигнал по зворотній лінії зв'язку так, що пілот-сигнал може прийматися за допомогою всіх секторів, призначених для того, щоб приймати пілот-сигнал, наприклад, усіх секторів в активному наборі термінала 120. В одній схемі, це може бути досягнуте за допомогою скремблювання пілот-сигналу за допомогою послідовності скремблювання, яка відома для всіх призначених секторів. Термінал 120 може скремблювати пілот-сигнал так, що пілот-сигнал є унікальним для термінала 120 серед пілотсигналів усіх терміналів у даному секторі. Це дозволило б сектору приймати та ідентифікувати пілот-сигнал від термінала 120. Крім того, термінал 120 може скремблювати пілот-сигнал так, що пілот-сигнал не є конкретним для будь-якого сектора. Це в такому випадку повинне давати можливість прийому пілот-сигналу від термінала 120 за допомогою всіх позначених секторів. Це також повинно давати можливість терміналу 120 передавати той самий пілот-сигнал, навіть коли термінал 120 переміщається в системі і його обслуговуванні передається від сектора до сектора. В одній схемі, послідовність скремблювання для пілот-сигналу може бути сформована на основі набору параметрів, що можуть використовуватися для того, щоб ідентифікувати термінал 120 і/або мінімізувати колізії з іншими терміналами. Загалом, будь-який набір параметрів може використовуватися для того, щоб формувати послідовність скремблювання для пілот-сигналу. Набір може включати в себе тільки статичні параметри або тільки динамічні параметри, або як статичні, так і динамічні параметри. Статичний параметр - це параметр, значення якого не змінюється під час сеансу зв'язку для термінала, навіть якщо обслуговування термінала передається від сектора до сектора. Статичний параметр також може згадуватися як параметр 3 UA 98635 C2 сеансу і може бути частиною інформації про стан сеансу для термінала. Динамічний параметр це параметр, значення якого може змінюватися під час сеансу зв'язку. В одній схемі, набір параметрів для послідовності скремблювання для пілот-сигналу може включати в себе параметри, наведені в табл.1. 5 Таблиця 1 Параметри для послідовності скремблювання пілот-сигналу Параметр Довжина PilotID MACID 25 30 35 40 18 бітів System time 20 10 бітів Access time 15 11 бітів AccessSequenceID 10 10 бітів 15 бітів Опис Ідентифікатор сектора, через який термінал 120 спочатку здійснював доступ до системи. Ідентифікатор, призначений для термінала 120 за допомогою початкового сектора доступу. Індекс послідовності доступу, що відправляється за допомогою термінала 120 для початкового доступу до системи. Час початкового доступу до системи за допомогою термінала 120. Час, в який пілот-сигнал передається за допомогою термінала 120. PilotID також може згадуватися, або може містити, ідентифікатор сектора, PilotPN тощо. Кожен сектор може передавати пілот-сигнал по прямій лінії зв'язку і може скремблювати цей пілот-сигнал за допомогою послідовності скремблювання, призначеної цьому сектору. PilotPN може бути індексом для послідовності скремблювання, що використовується за допомогою сектора. Інші форми ідентифікатора сектора також можуть використовуватися для набору параметрів послідовності скремблювання для пілот-сигналу. Ідентифікатор керування доступом до середовища передачі (MACID) також може згадуватися, або може містити, ідентифікатор термінала, часовий ідентифікатор радіомережі (RNTI) тощо. Кожен сектор може призначати унікальний MACID для кожного термінала, що обмінюється даними з цим сектором. Кожен термінал потім може бути унікально ідентифікований за допомогою його призначеного MACID для зв'язку із сектором. Терміналу 120 може призначатися MACID за допомогою даного сектора при здійсненні доступу до сектора, при передачі обслуговування сектору, при додаванні сектора до активного набору тощо. Термінал 120 може використовувати призначений MACID протягом часу, протягом якого термінал 120 підтримує зв'язок із сектором. Призначення MACID може бути скасоване, коли термінал 120 залишає сектор, коли сектор віддаляється від активного набору тощо. MACID, призначений за допомогою початкового сектора доступу, не може бути допустимим для зв'язку з іншими секторами, однак може використовуватися для того, щоб ідентифікувати пілот-сигнал від термінала 120. Інші форми ідентифікатора термінала також можуть використовуватися для набору параметрів послідовності скремблювання. Індекс послідовності доступу може використовуватися для того, щоб ідентифікувати термінал 120 для початкового доступу до системи, до того як МАСИ) призначається терміналу 120. Термінал 120 може випадково вибирати індекс послідовності доступу і може відправляти відповідну послідовність доступу по R-ACH, щоб здійснювати доступ до системи. Послідовність доступу також може згадуватися як сигнатура доступу, тестове повідомлення доступу, тестове повідомлення довільного доступу, сигнатурна послідовність тощо. Час доступу може бути заданий по-різному. Наприклад, час доступу може бути часом, у який термінал 120 відправляє послідовність доступу по зворотній лінії зв'язку, часом, у який сектор відправляє дозвіл доступу для термінала 120 по прямій лінії зв'язку, тощо. Час доступу також може бути заданий в різних форматах. В одній схемі, час доступу може бути заданий за допомогою конкретного числа молодших значущих бітів (наприклад, 18 LSB) індексу кадру протягом часу початкового доступу до системи за допомогою термінала 120. В іншій схемі, час доступу може бути даний за допомогою конкретного числа LSB (наприклад, 9 LSB) індексу суперкадру та індексу кадру (наприклад, 5 або 6 бітів) у рамках суперкадру, коли здійснювався початковий доступ до системи. Системний час може бути часом передачі і також може згадуватися як поточний час, поточний системний час, час передачі тощо. Системний час може бути заданий в різних форматах. В одній схемі, системний час може бути заданий конкретним числом LSB 4 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 (наприклад, 9 LSB) індексу суперкадру та індексу кадру (наприклад, 6 бітів) кадру в рамках суперкадру, коли відбувається передача. Системний час також може бути заданий в інших форматах. У схемі, показаній в таблиці 1, PilotID, MACID, AccessSequencelD і час доступу можуть бути статичними параметрами, а системний час може бути динамічним параметром. Статичні параметри можуть бути одержані під час початкового доступу до системи і можуть бути доступними як у терміналі, так і секторі доступу відразу після того, як початковий доступ до системи завершений. Таким чином, передача і прийом пілот-сигналу може починатися, як тільки початковий доступ до системи завершений, і не потребує додаткового обміну або повідомленнями конфігурування або будь-якого обміну пакетами даних. Статичні параметри також можуть бути одержані під час встановлення виклику, передачі обслуговування тощо. Набір статичних параметрів у таблиці 1 може приводити до високої імовірності унікальності скремблювання пілот-сигналу серед різних терміналів і може зменшувати імовірність колізій між різними терміналами. Таблиця 1 показує зразковий набір параметрів і зразковий розмір для кожного параметра відповідно до однієї конкретної схеми. Параметри в таблиця 1 можуть мати інші розміри. Інші статичні і/або динамічні параметри також можуть використовуватися для того, щоб формувати послідовність скремблювання для пілот-сигналу. Наприклад, R-PICH або субсегмент CDMA можуть стрибкоподібно змінюватися по ширині смуги системи на основі шаблона стрибкоподібної зміни, і динамічний параметр може бути визначений на основі частотних ресурсів, що використовуються для субсегмента CDMA або R-PICH. Інші комбінації параметрів також можуть використовуватися для того, щоб формувати послідовність скремблювання для пілот-сигналу. Наприклад, послідовність скремблювання може бути сформована на основі (і) комбінації PilotID, MACID і системного часу, (іі) комбінації MACID, часу доступу і системного або часу (ііі) деякої іншої комбінації параметрів. В іншій схемі, послідовність скремблювання може бути сформована на основі статичного значення (наприклад, псевдовипадкового значення), призначеного за допомогою початкового сектора доступу або вибраного за допомогою термінала 120, і системного часу. Статичні параметри можуть бути надані кожному сектору, зазначеному для того, щоб приймати пілот-сигнал від термінала 120, наприклад, кожному новому сектору, доданому в активний набір термінала 120. Інша інформація про стан сеансу також може передаватися в новий сектор після додавання в активний набір. Динамічні параметри можуть бути відомі кожному сектору і, можливо, не повинні відправлятися в новий сектор. Набір параметрів, що використовуються для того, щоб формувати послідовність скремблювання для пілот-сигналу, повинен унікально ідентифікувати термінал 120 з достатньо високою імовірністю. Це може забезпечувати, що імовірність пілот-сигналів від двох терміналів, що використовують одну послідовність скремблювання і конфліктують, є незначною. Необхідна імовірність унікальності може бути досягнута за допомогою використання достатньої кількості параметрів з достатньою кількістю бітів. Загалом, будь-який набір параметрів може використовуватися для того, щоб унікально ідентифікувати термінал 120 з достатньо високою імовірністю. Набір параметрів може бути зроблений доступним для всіх зазначених секторів так, щоб ці сектори могли приймати пілот-сигнал від термінала 120. Набір параметрів можна відправляти через транзитне з'єднання до кожного нового сектора або через сигналізацію від термінала 120 до кожного нового сектора. Послідовність скремблювання для пілот-сигналу може бути сформована на основі набору параметрів по-різному. В одній схемі, набір параметрів може використовуватися безпосередньо як початкове число для PN-генератора, який може реалізувати конкретний породжуючий поліном. В іншій схемі, набір параметрів може бути хешований за допомогою хеш-функції, щоб одержувати початкове число для PN-генератора. Хеш-функція може перетворювати набір параметрів у псевдовипадкове початкове число і може надавати початкове число з меншою кількістю бітів, ніж набір параметрів. В одній схемі, набір параметрів включає в себе PilotID (наприклад, 10 бітів), MACID (наприклад, 11 бітів), індекс послідовності доступу (наприклад, 10 бітів), час доступу (наприклад, 18 бітів) і системний час (наприклад, 15 бітів). Цей набір параметрів може бути хешований, щоб одержувати початкове число фіксованого розміру (наприклад, 20 бітів). Інші комбінації параметрів і/або розмірів параметрів також можуть використовуватися для того, щоб формувати початкове число, яке також може мати інші розміри. Розмір початкового числа може бути вибраний на основі необхідної імовірності колізій між різними терміналами. Для 20-бітового -20 початкового числа, імовірність, що два термінали мають одне початкове число, дорівнює 2 , -6 що становить приблизно 10 . Якщо є 1000 терміналів в одному секторі, імовірність колізії 5 UA 98635 C2 5 10 15 20 25 30 35 40 45 послідовності скремблювання даного термінала з послідовністю скремблювання кожного з -3 інших терміналів становить 10 . Ця імовірність колізії може бути достатньо низкою і може мати незначний вплив на продуктивність системи. Використання динамічного параметра для того, щоб формувати послідовність скремблювання, дозволяє зменшувати імовірність повторюваних колізій між пілот-сигналами від двох терміналів. Наприклад, перший набір із статичних і динамічних параметрів для першого термінала може бути хешований до такого самого дайджесту, як другий набір із статичних і динамічних параметрів для другого термінала, навіть якщо ці два набори параметра є різними, внаслідок випадкового характеру хеш-функції. Динамічний параметр може бути системним часом, який повинен змінюватися для кожної події передачі пілот-сигналу, тим самим забезпечуючи те, що інший набір параметрів вводиться в хеш-функцію. Хеш-функція, що вводиться, отже, змінюється від однієї події передачі пілот-сигналу до іншого, і додатково відрізняється для різних терміналів внаслідок наявності статичних параметрів. Як результат, виведення хеша є різним для кожного термінала і для кожної події передачі пілот-сигналу, тим самим зменшуючи імовірність повторюваних колізій. Якщо послідовності скремблювання двох терміналів конфліктують в одній події передачі пілот-сигналу, то ці послідовності скремблювання ймовірно не повинні конфліктувати у наступній події передачі пілот-сигналу. Імовірність колізії в кожній події передачі пілот-сигналу може бути незалежною подією з -6 імовірністю 10 внаслідок використання системного часу як одного з введень у хеш-функцію. Хешування також надає можливість використання PN-генератора меншої довжини для послідовності скремблювання, що дозволяє спрощувати реалізацію. PN-генератор може бути ініціалізований за допомогою початкового числа і потім може керуватися так, щоб формувати послідовність скремблювання для пілот-сигналу. Пілот-сигнал від термінала 120 може використовуватися в різних цілях. Обслуговуючий сектор 110 може використовувати пілот-сигнал як опорний сигнал, щоб оцінювати якість сигналів, що приймаються, для термінала 120. Обслуговуючий сектор 110 може визначати команди керування потужністю (PC) на основі якості сигналів, що приймаються, і може відправляти PC-команди по прямому каналу керування потужністю (F-PCCH) у термінал 120. Термінал 120 може регулювати свою потужність або передачі щільність потужності передачі (PSD) на основі PC-команд. Пілот-сигнал від термінала 120, таким чином, може використовуватися як опорне значення, щоб задавати рівні потужності даних і каналів керування, що відправляються за допомогою термінала 120. Усі сектори в активному наборі термінала 120 можуть приймати пілот-сигнал від термінала 120 і визначати інтенсивність, з якою приймається пілот-сигнал. Кожен сектор в активному наборі може визначати індикатор якості пілот-сигналу (PQI) на основі інтенсивності пілотсигналу, що приймається, і може відправляти PQI по прямому PQI-каналу (F-PQICH) у термінал 120. Термінал 120 може використовувати PQI від усіх секторів в активному наборі, щоб визначати те, який сектор має оптимальну зворотну лінію зв'язку (наприклад, найвищу інтенсивність пілот-сигналу, що приймається, ) для термінала 120, і може використовувати цю інформацію для того, щоб приймати рішення по передачі обслуговування по зворотній лінії зв'язку. Термінал 120 також може скремблювати дані трафіку, що відправляються в обслуговуючий сектор, і може використовувати послідовність скремблювання, що є конкретною для обслуговуючого сектора. В одній схемі, послідовність скремблювання для даних трафіку може бути сформована на основі набору параметрів, наведених у табл.2. Таблиця 2 Параметри для послідовності скремблювання даних трафіку Параметр PilotID MACID System time 50 Довжина Опис 10 бітів Ідентифікатор обслуговуючого сектора для термінала 120. Ідентифікатор, призначений для термінала 120 за допомогою 11 бітів обслуговуючого сектора. 10 бітів Час, у який дані трафіку передаються за допомогою термінала 120. PilotID та MACID у таблиці 2 зв'язані з обслуговуючим сектором і можуть відрізнятися від PilotID та MACID у таблиці 1, які зв'язані з початковим сектором доступу. Це може мати місце, якщо обслуговування термінала 120 передається від початкового сектора доступу поточному обслуговуючому сектору. Системний час може бути заданий в різних форматах. В одній схемі, 6 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 системний час може бути заданий за допомогою 4 LSB індексу суперкадру і 6-бітового індексу кадру в рамках суперкадру, в якому передаються дані трафіку. Таблиця 2 показує зразковий набір параметрів і зразковий розмір для кожного параметра відповідно до однієї конкретної схеми. Ці параметри можуть мати інші розміри. Інші параметри також можуть використовуватися для того, щоб формувати послідовність скремблювання для даних трафіку. Наприклад, індекс формату пакета для пакета може використовуватися як параметр для послідовності скремблювання даних трафіку. Інші комбінації параметрів також можуть використовуватися для послідовності скремблювання для даних трафіку. Фіг.3 показує блок-схему схеми термінала 120, що обслуговує сектора/базової станції 110 і сектора/базової станції 112 активного набору на Фіг.1. У терміналі 120, процесор 320 передачі може приймати дані трафіку з джерела даних 312 і службові сигнали з контролера/процесора 330. Процесор 320 передачі може обробляти (наприклад, кодувати, перемежовувати і виконувати символьне перетворення) дані трафіку, службові сигнали і пілот-сигнал, і надавати символи даних, символи службових сигналів і пілотні символи, відповідно. При використанні в даному документі, символ даних - це символ для даних трафіку, символ службових сигналів - це символ для службових сигналів або керуючої інформації, пілотний символ - це символ для пілот-сигналу, причому символ типово є комплексним значенням. Модулятор (MOD) 322 може виконувати модуляцію для даних, службових сигналів і пілотних символів (наприклад, для OFDM) і надавати вихідні символи шумоподібної послідовності. Кожен символ шумоподібної послідовності може бути комплексним значенням у часовій ділянці. Передавальний пристрій (TMTR) 324 може приводити до необхідних параметрів (наприклад, перетворювати в аналогову форму, підсилювати, фільтрувати і перетворювати з підвищенням частоти) вихідні символи шумоподібної послідовності і формувати сигнал зворотної лінії зв'язку, що може бути переданий через антену 326. В обслуговуючому секторі 110, антена 352а може приймати сигнали зворотної лінії зв'язку від термінала 120 та інших терміналів. Приймальний пристрій (RCVR) 354а може приводити до необхідних параметрів (наприклад, фільтрувати, підсилювати, перетворювати із зниженням частоти та відцифровувати) сигнал, що приймається, з антени 352а і надавати вибірки. Демодулятор (DEMOD) 356а може виконувати демодуляцію вибірок (наприклад, для OFDM) і надавати оцінки символів. Процесор 360а прийому може обробляти (наприклад, виконувати обернене символьне перетворення, виконувати обернене перемежування і декодувати) оцінки символів, надавати декодовані дані в приймач 362а даних і надавати декодовані службові сигнали в контролер/процесор 370а. Сектор 112 може аналогічно приймати та обробляти сигнали зворотної лінії зв'язку від термінала 120 та інших терміналів. Сигнал, що приймається, від антени 352b може бути приведений до необхідних параметрів за допомогою приймального пристрою 354b, демодульований за допомогою демодулятора 356b та оброблений за допомогою процесора 360b прийому. У прямій лінії зв'язку, процесор 382а передачі в обслуговуючому секторі 110 може приймати та обробляти дані трафіку з джерела 380а даних і службові сигнали (наприклад, PC-команди, PQI тощо) з контролера/процесора 370а. Модулятор 384а може виконувати модуляцію для даних, службових сигналів і пілотних символів від процесора 382а передачі і надавати вихідні символи шумоподібної послідовності. Передавальний пристрій 386а може приводити до необхідних параметрів вихідні символи шумоподібної послідовності і формувати сигнал прямої лінії зв'язку, який може бути переданий через антену 352а. Сектор 112 може аналогічно обробляти і передавати дані трафіку, службові сигнали і пілот-сигнал у термінали в межах його покриття. У терміналі 120, сигнали прямої лінії зв'язку від секторів 110 і 112 та інших секторів можуть бути прийняті за допомогою антени 326, приведені до необхідних параметрів за допомогою приймального пристрою 340, демодульовані за допомогою демодулятора 342 та оброблені за допомогою приймального процесора 344. Процесор 344 може надавати декодовані дані в приймач даних 346 і декодовані службові сигнали в контролер/процесор 330. Контролери/процесори 330, 370а та 370b можуть керувати роботою в терміналі 120 і секторах 110 та 112, відповідно. Запам'ятовуючі пристрої 332, 372а та 372Ь можуть зберігати дані і програмні коди для термінала 120 і секторів 110 та 112, відповідно. Планувальники 374а та 374b можуть диспетчеризувати термінали, що обмінюються даними із секторами 110 та 112, відповідно, і можуть призначати канали і/або частотно-часові ресурси терміналам. Фіг.4 показує блок-схему схеми процесора 320 передачі в терміналі 120 на Фіг.3. У цій схемі, процесор 320 передачі включає в себе процесор 410 пілот-сигналу ТХ і процесор 420 ТХ-даних. 7 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 У процесорі 410 пілот-сигналу ТХ, формувач 412 може приймати набір параметрів для послідовності скремблювання для пілот-сигналу, наприклад, параметрів у таблиці 1. Формувач 412 може формувати послідовність скремблювання для пілот-сигналу на основі набору параметрів, що приймається. Модуль 414 скремблювання може скремблювати пілотні дані за допомогою послідовності скремблювання від формувача 412 і надавати скрембльовані пілотні дані. Пілотні дані можуть бути будь-якими відомими даними, наприклад, ортогональною послідовністю, послідовністю з усіх одиниць, відомою PN-послідовністю тощо. Формувач 416 може формувати пілотні символи на основі скрембльованих пілотних даних і надавати пілотні символи в модулятор 322. У процесорі 420 ТХ-даних, формувач 422 може приймати набір параметрів для послідовності скремблювання даних трафіку, наприклад, параметрів у таблиці 2. Формувач 422 може формувати послідовність скремблювання для даних трафіку на основі набору параметрів, що приймається. Кодер і модуль 424 перемежовування можуть приймати і кодувати пакет даних трафіку, щоб одержувати кодований пакет, і додатково можуть перемежовувати біти в кодованому пакеті на основі схеми перемежовування. Модуль 426 скремблювання може скремблювати біти від модуля 424 перемежовування для того, щоб рандомізувати дані. Модуль 428 символьного перетворення може перетворювати скрембльовані дані трафіку в символи даних на основі вибраної схеми модуляції. Фіг.5 показує блок-схему схеми процесора 410 пілот-сигналу ТХ на Фіг.4. У формувачі 412 послідовностей скремблювання, мультиплексор (Мux) 512 може приймати і конкатенувати набір параметрів для послідовності скремблювання пілот-сигналу, наприклад, параметрів у таблиці 1. Хеш-функція 514 може приймати і хешувати конкатенований набір параметрів і надавати хешдайджест. Хеш-дайджест може мати фіксований розмір (наприклад, 20 бітів) і може використовуватися як початкове число для PN-генератора 516. PN-генератор 516 може бути ініціалізований за допомогою початкового числа і може надавати псевдовипадкову послідовність символів шумоподібної послідовності як послідовність скремблювання. У рамках модуля 414 скремблювання, помножувач 522 може виконувати множення по символах шумоподібної послідовності пілотних даних за допомогою послідовності скремблювання і надавати скрембльовані пілотні дані. В одній схемі, пілотні дані - це послідовність з L одиниць, послідовність скремблювання - це псевдовипадкова послідовність з L символів шумоподібної послідовності, а скрембльовані пілотні дані - це псевдовипадкова послідовність з L символів шумоподібної послідовності. Пілотні дані також можуть бути іншою ортогональною послідовністю або іншими відомими даними. У рамках формувача 416 пілотних символів, помножувач 532 може масштабувати кожен символ шумоподібної послідовності від модуля 414 скремблювання з посиленням для R-PICH. Модуль 534 перемежовування може переставляти послідовність символів шумоподібної послідовності від помножувача 532. В одній схемі, пілот-сигнал передаються в субсегменті CDMA M піднесучих у N періодів OFDM-символу, як показано на Фіг.2. Модуль 536 може секціонувати послідовність символів шумоподібної послідовності з модуля 534 перемежовування на N підпослідовностей, причому кожна підпослідовність включає в себе М символів шумоподібної послідовності. У кожен період OFDM-символу субсегмента CDMA модуль 538 дискретного перетворення Фур'є (DFT) може виконувати М-точкове DFT для М символів шумоподібної послідовності в підпослідовності для цього періоду OFDM-символу і надавати М пілотних символів для N піднесучих у період OFDM-символу. Як зазначено вище, кілька терміналів можуть передавати різні канали в одному субсегменті CDMA з використанням CDM. Термінал 120 може відправляти log2(L)-бітове значення по каналу в субсегменті CDMA за допомогою (і) перетворення цього значення в послідовність Уолша з L символів шумоподібної послідовності і (іі) скремблювання послідовності Уолша з L символів шумоподібної послідовності за допомогою послідовності скремблювання з L символів шумоподібної послідовності, щоб одержувати псевдовипадкову послідовність з L символів шумоподібної послідовності. Ця псевдовипадкова послідовність може бути накладена з іншими псевдовипадковими послідовностями від інших терміналів і/або інших каналів у субсегменті CDMA. Ця суперпозиція складає CDM. Формувач 422 послідовностей скремблювання і модуль 426 скремблювання для процесора 420 ТХ-даних на Фіг.4 можуть бути реалізовані способом, аналогічним формувачу 412 послідовностей скремблювання і модулю 414 скремблювання, відповідно, на Фіг.5. Проте, хешфункція у формувачі 422 послідовностей скремблювання може формувати початкове число на основі іншого набору параметрів для даних трафіку, наприклад, параметрів у таблиці 2. Сектор може приймати пілот-сигнал від будь-якої кількості терміналів. Сектор може мати набір параметрів для послідовності скремблювання пілот-сигналу для кожного термінала, які 8 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 повинні бути прийняті за допомогою сектора. Сектор може приймати та обробляти пілотсигнали, що відправляються за допомогою кожного термінала, на основі послідовності скремблювання, що використовується за допомогою цього термінала для пілот-сигналу. Фіг.6 показує блок-схему схеми приймального процесора 360, який може використовуватися для приймальних процесорів 360а та 360b на Фіг.3. Приймальний процесор 360 включає в себе процесор 610 пілот-сигналу прийому (RX) і процесор 630 RX-даних. У процесорі 610 пілот-сигналу RX, процесор 612 пілотних символів може одержувати прийняті символи для субсегмента CDMA і може обробляти ці прийняті символи способом, комплементарним обробці за допомогою формувача 416 пілотних символів на Фіг.5. Процесор 612 може виконувати М-точкове обернене DFT (IDFT) для М символів, що приймаються, протягом кожного періоду OFDM-символу, щоб одержувати М вхідних вибірок. Процесор 612 потім може асемблювати вхідні вибірки для N періодів OFDM-символу субсегмента CDMA, щоб одержувати послідовність з L вхідних вибірок. Формувач 614 послідовностей скремблювання може формувати послідовність скремблювання для пілот-сигналу термінала 120 на основі набору параметрів, що використовуються за допомогою термінала 120 для пілот-сигналу. Формувач 614 може бути реалізований за допомогою формувача 412 на Фіг.5. Модуль 616 дескремблювання може дескремблювати послідовність вхідних вибірок за допомогою послідовності скремблювання і надавати дескрембльовану послідовність. Корелятор 618 пілот-сигналу може корелювати дескрембльовану послідовність за допомогою пілотних даних. Накопичувач 620 енергії може накопичувати енергію усіх вибірок з корелятора 618 пілот-сигналу. Пілот-сигнали з термінала 120 можуть бути прийняті через один або більше трактів передачі сигналів. Процесор 610 пілотсигналу RX може виконувати обробку длякожного цікавлячого тракту передачі сигналів і потім може комбінувати енергію всіх трактів передачі сигналів, щоб одержувати інтенсивність пілотсигналу, що приймається, для термінала 120. Формувач 622 PQI може одержувати інтенсивність пілот-сигналу, що приймається, і визначати PQI для термінала 120. Модуль 624 оцінки може оцінювати якість сигналів, що приймаються, для термінала 120. Формувач 626 може формувати PC-команду для термінала 120 на основі якості сигналів, що приймаються. PC-команда і PQI можуть відправлятися в термінал 120. Процесор 630 RX-даних може обробляти символи, що приймаються, для даних трафіку способом, комплементарним обробці за допомогою процесора 420 ТХ-даних на Фіг.4. Процесор 630 може формувати послідовність скремблювання для даних трафіку на основі набору параметрів, що використовуються за допомогою термінала 120 для даних трафіку. Процесор 630 потім може виконувати дескремблювання даних трафіку за допомогою цієї послідовності скремблювання. Фіг.7 показує схему процесу 700 для передачі пілот-сигналу за допомогою термінала 120. Послідовність скремблювання може бути сформована на основі набору параметрів, що містить щонайменше один статичний параметр і можливо щонайменше один динамічний параметр (етап 712). Щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку термінала. Щонайменше один статичний параметр може бути визначений під час початкового доступу до системи за допомогою термінала і може бути незалежним від обслуговуючого сектора для термінала. Щонайменше один статичний параметр може включати в себе щонайменше одне з ідентифікатора сектора, до якого спочатку здійснює доступ термінал, ідентифікатора, призначеного терміналу за допомогою початкового сектора доступу, індексу послідовності доступу, що використовується за допомогою термінала для початкового доступу до системи, і часу початкового доступу до системи за допомогою термінала. Щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку і може включати в себе параметр для системного часу. Параметр для системного часу може включати в себе індекс суперкадру для суперкадру, в якому передається пілот-сигнал, і/або індекс кадру для кадру в рамках суперкадру, в якому передається пілот-сигнал. На етапі 712, набір параметрів може бути хешований, щоб одержувати початкове число, і послідовність скремблювання може бути сформована на основі початкового числа. Пілот-сигнал може формуватися на основі послідовності скремблювання (етап 714). На етапі 714 пілотні дані можуть бути скрембльовані за допомогою послідовності скремблювання, щоб одержати скрембльовані пілотні дані. Пілотні символи можуть бути сформовані на основі скрембльованих пілотних даних і можуть бути перетворені в частотно-часовий блок, що використовується для передачі пілот-сигналу. Пілотні дані можуть містити ортогональну послідовність або деякі інші відомі дані. Пілот-сигнал може містити пілотні символи. Частотночасовий блок може бути призначений для субсегмента CDMA, що використовується за 9 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 допомогою різних терміналів для передачі пілот-сигналу і/або іншої інформації по зворотній лінії зв'язку. Пілот-сигнал може бути переданий щонайменше в один сектор, включаючи обслуговуючий сектор для термінала (етап 716). Щонайменше один сектор може бути в активному наборі термінала. PC-команда, визначена на основі пілот-сигналу, може бути прийнята від обслуговуючого сектора (етап 718). Потужність передачі термінала може регулюватися на основі PC-команди (етап 720). PQI, визначений на основі пілот-сигналу, може бути прийнятий від кожного щонайменше з одного сектора (етап 722). Один з щонайменше одного сектора може бути вибраний як обслуговуючий сектор на основі PQI, що приймається від кожного сектора (етап 724). Обслуговування термінала може бути передане від обслуговуючого сектора новому обслуговуючому сектору. Той самий набір параметрів може використовуватися для того, щоб формувати послідовність скремблювання для пілот-сигналу, що передається в новий обслуговуючий сектор. Фіг.8 ілюструє схему пристрою 800 для передачі пілот-сигналу. Пристрій 800 включає в себе засіб формування послідовності скремблювання на основі набору параметрів, що містить щонайменше один статичний параметр і можливо щонайменше один динамічний параметр (модуль 812), засіб формування пілот-сигналу на основі послідовності скремблювання (модуль 814), засіб відправлення пілот-сигналу щонайменше в один сектор, включаючи обслуговуючий сектор для термінала (модуль 816), засіб прийому PC-команди, визначеної на основі пілотсигналу від обслуговуючого сектора (модуль 818), засіб регулювання потужності передачі термінала на основі PC-команди (модуль 820), засіб прийому PQI, визначеного на основі пілотсигналу, від коленого щонайменше з одного сектора (модуль 822), і засіб вибору одного щонайменше з одного сектора як обслуговуючого сектора на основі PQI, що приймається від кожного сектора (модуль 824). Фіг.9 показує схему процесу 900 для прийому пілот-сигналу за допомогою сектора. Пілотсигнал може бути прийнятий від термінала, наприклад, з частотно-часового блока, що використовується для передачі пілот-сигналу по зворотній лінії зв'язку (етап 912). Послідовність скремблювання для термінала може бути сформована на основі набору параметрів, що містить щонайменше один статичний параметр і можливо щонайменше один динамічний параметр (етап 914). Набір параметрів може бути хешований, щоб одержувати початкове число, і послідовність скремблювання може бути сформована на основі початкового числа. Пілотсигнал, що приймається, може бути дескрембльований за допомогою послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал для термінала (етап 916). Інтенсивність пілот-сигналу, що приймається, для термінала може бути визначена на основі дескрембльованого пілот-сигналу (етап 918). PQI може бути сформований на основі інтенсивності пілот-сигналу, що приймається, (етап 920) і відправлений у термінал (етап 922). Якщо сектор є обслуговуючим сектором для термінала, то якість сигналів, що приймаються, для термінала може бути визначена на основі дескрембльованого пілот-сигналу (етап 924). PCкоманда може бути сформована на основі якості сигналів, що приймаються, (етап 926) і відправлена у термінал (етап 928). Фіг.10 показує схему пристрою 1000 для прийому пілот-сигналу. Пристрій 1000 включає в себе засіб прийому пілот-сигналу від термінала (модуль 1012), засіб формування послідовності скремблювання для термінала на основі набору параметрів, що містить щонайменше один статичний параметр і можливо щонайменше один динамічний параметр (модуль 1014), засіб дескремблювання пілот-сигналу, що приймається, за допомогою послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал для термінала (модуль 1016), засіб визначення інтенсивності пілот-сигналу, що приймається, для термінала на основі дескрембльованого пілот-сигналу (модуль 1018), засіб формування PQI на основі інтенсивності пілот-сигналу, що приймається, (модуль 1020), засіб відправлення PQI у термінал (модуль 1022), засіб визначення якості сигналів, що приймаються, для термінала на основі дескрембльованого пілот-сигналу (модуль 1024), засіб формування PC-команди на основі якості сигналів, що приймаються, (модуль 1026) і засіб відправлення PC-команди в термінал (модуль 1028). Фіг.11 показує схему процесу 1100 для передачі пілот-сигналу і даних трафіку за допомогою термінала 120. Перша послідовність скремблювання може бути сформована на основі першого набору параметрів (етап 1112). Перший набір параметрів може бути хешований, щоб одержувати перше початкове число, і перша послідовність скремблювання може бути сформована на основі першого початкового числа. Пілот-сигнал може бути сформований на основі першої послідовності скремблювання (етап 1114). Пілот-сигнал може бути переданий щонайменше в один сектор, включаючи обслуговуючий сектор для термінала (етап 1116). 10 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 Друга послідовність скремблювання може бути сформована на основі другого набору параметрів (етап 1118). Другий набір параметрів може бути хешований, щоб одержувати друге початкове число, і друга послідовність скремблювання може бути сформована на основі другого початкового числа. Дані трафіку можуть бути скрембльовані на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку (етап 1120). Скрембльовані дані трафіку можуть бути відправлені в обслуговуючий сектор (етап 1122). Перший набір може включати в себе щонайменше один параметр, незалежний від обслуговуючого сектора. Перший набір може включати в себе щонайменше одне з ідентифікатора сектора, до якого спочатку здійснює доступ термінал, ідентифікатора, призначеного терміналу за допомогою початкового сектора доступу, індексу послідовності доступу, що використовується за допомогою термінала для початкового доступу до системи, і часу початкового доступу до системи за допомогою термінала. Другий набір може включати в себе щонайменше один параметр, що залежить від обслуговуючого сектора. Другий набір може включати в себе щонайменше одне з ідентифікатора обслуговуючого сектора та ідентифікатора, призначеного терміналу за допомогою обслуговуючого сектора. Перший і другий набори можуть включати в себе параметр для системного часу, який може включати в себе (і) індекс суперкадру для суперкадру, в якому передається пілот-сигнал або дані трафіку, і/або (іі) індекс кадру для кадру в рамках суперкадру, в якому передається пілот-сигнал або дані трафіку. Перший і другий набори також може включати в себе інші параметри. Фіг.12 показує схему пристрою 1200 для передачі пілот-сигналу і даних трафіку. Пристрій 1200 включає в себе засіб формування першої послідовності скремблювання на основі першого набору параметрів (модуль 1212), засіб формування пілот-сигналу на основі першої послідовності скремблювання (модуль 1214), засіб передачі пілот-сигналу щонайменше в один сектор, включаючи обслуговуючий сектор для термінала (модуль 1216), засіб формування другої послідовності скремблювання на основі другого набору параметрів (модуль 1218), засіб скремблювання даних трафіку на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку (модуль 1220), і засіб передачі скрембльованих даних трафіку в обслуговуючий сектор (модуль 1222). Фіг.13 показує схему процесу 1300 для прийому пілот-сигналу і даних трафіку за допомогою сектора. Пілот-сигнал може бути прийнятий від термінала (етап 1312). Перша послідовність скремблювання може бути сформована на основі першого набору параметрів, які можуть включати в себе будь-які з параметрів у таблиці 1 (етап 1314). Перший набір параметрів може бути хешований, щоб одержувати перше початкове число, і перша послідовність скремблювання може бути сформована на основі першого початкового числа. Пілот-сигнал, що приймається, може бути дескрембльований за допомогою першої послідовності скремблювання, щоб одержати дескрембльований пілот-сигнал (етап 1316). Дані трафіку також можуть бути прийняті від термінала (етап 1318). Друга послідовність скремблювання може бути сформована на основі другого набору параметрів, які можуть включати в себе будь-які з параметрів у таблиці 2 (етап 1320). Другий набір параметрів може бути хешований, щоб одержувати друге початкове число, і друга послідовність скремблювання може бути сформована на основі другого початкового числа. Дані трафіку, що приймаються, можуть бути дескрембльовані за допомогою другої послідовності скремблювання, щоб одержувати дескрембльовані дані трафіку (етап 1322). Фіг.14 показує схему пристрою 1400 для прийому пілот-сигналу і даних трафіку. Пристрій 1400 включає в себе засіб прийому пілот-сигналу від термінала (модуль 1412), засіб формування першої послідовності скремблювання на основі першого набору параметрів (модуль 1414), засіб дескремблювання пілот-сигналу, що приймається, за допомогою першої послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал (модуль 1416), засіб прийому даних трафіку від термінала (модуль 1418), засіб формування другої послідовності скремблювання на основі другого набору параметрів (модуль 1420), і засіб дескремблювання даних трафіку, що приймаються, за допомогою другої послідовності скремблювання, щоб одержувати дескрембльовані дані трафіку (модуль 1422). Модулі на Фіг.8, 10, 12 та 14 можуть містити процесори, електронні пристрої, апаратні пристрої, електронні компоненти, логічні схеми, запам'ятовуючі пристрої тощо, або будь-яку комбінацію вищезазначеного. Описані в даному документі способи можуть бути реалізовані різними засобами. Наприклад, ці методи можуть бути реалізовані в апаратних засобах, мікропрограмному забезпеченні, 11 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 60 програмному забезпеченні або їх комбінації. При реалізації в апаратних засобах модулі обробки, що використовуються для того, щоб виконувати способи в об'єкті (наприклад, у терміналі або базовій станції), можуть бути реалізовані в одній або декількох спеціалізованих інтегральних схемах (ASIC), процесорах цифрових сигналів (DSP), пристроях цифрової обробки сигналів (DSPD), програмованих логічних пристроях (PLD), програмованих користувачем логічних матрицях (FPGA), процесорах, контролерах, мікроконтролерах, мікропроцесорах, електронних пристроях, інших електронних модулях, призначених для того, щоб виконувати описані в даному документі функції, у комп'ютері або в комбінації вищезазначеного. При реалізації в мікропрограмному забезпеченні і/або програмному забезпеченні методи можуть бути реалізовані за допомогою коду (наприклад, процедур, модулів, функцій тощо), який виконує описані в даному документі функції. Загалом, будь-який машино/процесорнозчитуваний носій, що матеріально здійснює мікропрограмне забезпечення і/або програмний код, може використовуватися в реалізації методів, описаних у даному документі. Наприклад, мікропрограмне забезпечення і/або програмний код можуть бути збережені в запам'ятовуючому пристрої (наприклад, запам'ятовуючому пристрої 332, 372а або 372b на Фіг.3) і виконані за допомогою процесора (наприклад, процесора 330, 370а або 370b). Запам'ятовуючий пристрій може бути реалізований в процесорі або зовні стосовно процесора. Мікропрограмне забезпечення і/або програмний код також можуть бути збережені в машино/процесорнозчитуваному носії, такому як оперативний запам'ятовуючий пристрій (RAM), постійний запам'ятовуючий пристрій (ROM), енергонезалежний оперативний запам'ятовуючий пристрій (NVRAM), програмований постійний запам'ятовуючий пристрій (PROM), електрично стираний PROM (EEPROM), флеш-пам'ять, гнучкий диск, компакт-диск (CD), універсальний цифровий диск (DVD), магнітний або оптичний пристрій збереження даних тощо. Код може виконуватися за допомогою одного або більше комп'ютерів/процесорів і може інструктувати комп'ютеру/процесору(ам) виконувати визначені аспекти функціональних можливостей, описаних у даному документі. Попередній опис розкриття наданий для того, щоб давати можливість будь-якому фахівцю в даній галузі техніки створювати або використовувати розкриття. Різні модифікації в розкритті повинні бути очевидними для фахівців у даній галузі техніки, а описані в даному документі загальні принципи можуть бути застосовані до інших варіантів без відступу від суті та обсягу винаходу. Таким чином, розкриття не має намір бути обмеженим описаними в даному документі прикладами і схемами, а повинне задовольняти найбільш широкому обсягу, узгодженому з принципами і новими функціями, розкритими в даному документі. Посилальні позиції 100 система бездротового зв'язку 110, 112, 114 базові станції 120 термінал 130 системний контролер 200 структура суперкадру 312 джерело даних 320 процесор 322 модулятор 324 передавальний пристрій 326 антена 330, 370а, 370b контролер/процесор 332, 372а, 372b запам'ятовуючий пристрій 340 приймальний пристрій 342 демодулятор 344 приймальний процесор 346 приймач даних 352а, 352b антена 354а, 354b приймальний пристрій 356а, 356b демодулятор 360а, 360b процесор прийому 362а приймач даних 374а, 374b планувальник 380а джерело даних 382а процесор передачі 384а модулятор 410 процесор пілот-сигналу ТХ 12 UA 98635 C2 5 10 15 20 25 412, 416, 422 формувач 414, 426 модуль скремблювання 420 процесор ТХ-даних 424, 534 модуль перемежовування 428 модуль символьного перетворення 512 мультиплексор (Mux) 514 хеш-функція 516 PN-генератор 522, 532 помножувач 538 модуль дискретного перетворення Фур'є 610 процесор пілот-сигналу 612 процесор пілотних символів 614 формувач послідовностей скремблювання 616 модуль дескремблювання 618 корелятор 622 формувач PQI 624 модуль оцінки 626 формувач 630 процесор RX-даних 700 процес для передачі пілот-сигналу 800 пристрій для передачі пілот-сигналу 900 процесор для прийому пілот-сигналу за допомогою сектора 1000 пристрій для прийому пілот-сигналу 1100 процес для передачі пілот-сигналу і даних трафіку за допомогою термінала 1200 пристрій для передачі пілот-сигналу і даних трафіку 1300 процес для прийому пілот-сигналу і даних трафіку за допомогою сектора 1400 пристрій для прийому пілот-сигналу і даних трафіку ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, виконаний з можливістю формувати послідовність скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр, формувати пілот-сигнал на основі послідовності скремблювання і передавати пілот-сигнал з термінала щонайменше в один сектор; і запам'ятовуючий пристрій, з'єднаний щонайменше з одним процесором. 2. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю хешувати набір параметрів, щоб одержувати початкове число, і формувати послідовність скремблювання на основі початкового числа. 3. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю скремблювати пілотні дані за допомогою послідовності скремблювання, щоб одержувати скрембльовані пілотні дані, формувати пілотні символи на основі скрембльованих пілотних даних і відображати пілотні символи в частотно-часовий блок, який використовується для передачі пілот-сигналу. 4. Пристрій за п. 1, в якому щонайменше один процесорвиконаний з можливістю формувати початкове число на основі набору параметрів і формувати послідовність скремблювання на основі цього початкового числа. 5. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю формувати пілот-сигнал додатково на основі пілотних даних, які містять ортогональну послідовність, і передавати пілот-сигнал в частотно-часовому блоці для субсегмента множинного доступу з кодовим розділенням (CDMA), який використовується декількома терміналами для передачі пілот-сигналу по зворотній лінії зв'язку. 6. Пристрій за п. 1, в якому щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку для термінала. 7. Пристрій за п. 1, в якому щонайменше один статичний параметр містить параметр, який є незалежним від обслуговуючого сектора для термінала. 8. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю одержувати щонайменше один статичний параметр після завершення початкового доступу до системи за допомогою термінала. 13 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 9. Пристрій за п. 1, в якому щонайменше один статичний параметр містить ідентифікатор (ID) сектора, до якого спочатку здійснює доступ термінал, або ідентифікатор, призначений терміналу сектором початкового доступу, або індекс послідовності доступу, який використовується терміналом для початкового доступу до системи, або час початкового доступу термінала до системи, або їх комбінацію. 10. Пристрій за п. 1, в якому щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку для термінала. 11. Пристрій за п. 1, в якому щонайменше один динамічний параметр містить параметр для системного часу. 12. Пристрій за п. 11, в якому параметр для системного часу містить індекс суперкадру для суперкадру, в якому передається пілот-сигнал. 13. Пристрій за п. 11, в якому параметр для системного часу містить індекс кадру для кадру, в якому передається пілот-сигнал. 14. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю приймати команду керування потужністю (PC) від обслуговуючого сектора для термінала, причому PCкоманда визначається на основі пілот-сигналу, і регулювати потужність передачі термінала на основі цієї РС-команди. 15. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю приймати індикатор якості пілот-сигналу (PQI) від кожного з щонайменше одного сектора, причому PQI від кожного сектора визначається на основі пілот-сигналу, і вибирати один з щонайменше одного сектора як обслуговуючий сектор для термінала на основі PQI, прийнятого від кожного з щонайменше одного сектора. 16. Пристрій за п. 1, в якому щонайменше один процесор виконаний з можливістю виконувати передачу обслуговування від поточного обслуговуючого сектора в новий обслуговуючий сектор і використовувати набір параметрів для формування послідовності скремблювання для пілотсигналу, який передається в новий обслуговуючий сектор. 17. Спосіб бездротового зв'язку, який включає етапи, на яких: формують послідовність скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр; формують пілот-сигнал на основі послідовності скремблювання; і передають пілот-сигнал з термінала в щонайменше один сектор. 18. Спосіб за п. 17, в якому формування послідовності скремблювання включає етапи, на яких: формують початкове число на основі набору параметрів; і формують послідовність скремблювання на основі початкового числа. 19. Спосіб за п. 17, в якому щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку для термінала, і щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку. 20. Спосіб за п. 17, в якому щонайменше один динамічний параметр містить параметр для системного часу. 21. Пристрій для бездротового зв'язку, який містить: засіб формування послідовності скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр; засіб формування пілот-сигналу на основі послідовності скремблювання; і засіб передачі пілот-сигналу з термінала в щонайменше один сектор. 22. Пристрій за п. 21, в якому щонайменше один статичний параметр має фіксоване значення для всього сеансу зв'язку для термінала, і щонайменше один динамічний параметр має змінне значення під час сеансу зв'язку. 23. Пристрій за п. 21, в якому засіб формування послідовності скремблювання містить: засіб формування початкового числа на основі набору параметрів; і засіб формування послідовності скремблювання на основі початкового числа. 24. Машиночитаний носій, який містить збережену на ньому комп'ютерну програму, причому програма містить: код для спонукання щонайменше одного комп'ютера формувати послідовність скремблювання на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр; код для спонукання щонайменше одного комп'ютера формувати пілот-сигнал на основі послідовності скремблювання; і 14 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 код для спонукання щонайменше одного комп'ютера передавати пілот-сигнал з термінала в щонайменше один сектор. 25. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, виконаний з можливістю приймати пілот-сигнал від термінала, формувати послідовність скремблювання для термінала на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр, і дескремблювати пілот-сигнал, який приймається за допомогою послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал для термінала; і запам'ятовуючий пристрій, з'єднаний щонайменше з одним процесором. 26. Пристрій за п. 25, в якому щонайменше один процесор виконаний з можливістю формувати початкове число на основі набору параметрів і формувати послідовність скремблювання на основі початкового числа. 27. Пристрій за п. 25, в якому щонайменше один динамічний параметр містить параметр для системного часу. 28. Пристрій за п. 25, в якому щонайменше один статичний параметр містить ідентифікатор (ID) сектора, до якого спочатку здійснює доступ термінал, або ідентифікатор, призначений терміналу сектором первинного доступу, або індекс послідовності доступу, який використовується терміналом для початкового доступу до системи, або час початкового доступу термінала до системи, або їх комбінацію. 29. Пристрій за п. 25, в якому щонайменше один процесор виконаний з можливістю визначати інтенсивність пілот-сигналу, який приймається для термінала, на основі дескрембльованого пілот-сигналу, формувати індикатор якості пілот-сигналу (PQI) на основі інтенсивності пілотсигналу, який приймається, і відправляти PQI в термінал. 30. Пристрій за п. 25, в якому щонайменше один процесор виконаний з можливістю визначати якість сигналів, які приймаються для термінала, на основі дескрембльованого пілот-сигналу, формувати команду керування потужністю (PC) на основі якості сигналів, які приймаються, і відправляти PC-команду в термінал. 31. Спосіб бездротового зв'язку, який включає етапи, на яких: приймають пілот-сигнал від термінала; формують послідовність скремблювання для термінала на основі набору параметрів, який зв'язаний з терміналом і містить щонайменше один статичний параметр і щонайменше один динамічний параметр; і дескремблюють пілот-сигнал, який приймається за допомогою послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал для термінала. 32. Спосіб за п. 31, в якому формування послідовності скремблювання включає етапи, на яких: формують початкове число на основі набору параметрів; і формують послідовність скремблювання на основі початкового числа. 33. Спосіб за п. 31, в якому щонайменше один динамічний параметр містить параметр для системного часу. 34. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, виконаний з можливістю формувати першу послідовність скремблювання на основі першого набору параметрів, формувати пілот-сигнал на основі першої послідовності скремблювання, щоб передавати пілот-сигнал щонайменше в один сектор, який включає в себе обслуговуючий сектор для термінала, формувати другу послідовність скремблювання на основі другого набору параметрів, скремблювати дані трафіку на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку, і передавати скрембльовані дані трафіку в обслуговуючий сектор; і запам'ятовуючий пристрій, з'єднаний з щонайменше одним процесором. 35. Пристрій за п. 34, в якому щонайменше один процесор виконаний з можливістю формувати перше початкове число на основі першого набору параметрів, формувати першу послідовність скремблювання на основі першого початкового числа, формувати друге початкове число на основі другого набору параметрів і формувати другу послідовність скремблювання на основі другого початкового числа. 36. Пристрій за п. 34, в якому перший набір містить щонайменше один параметр, незалежний від обслуговуючого сектора, і в якому другий набір містить щонайменше один параметр, залежний від обслуговуючого сектора. 37. Пристрій за п. 34, в якому щонайменше один з першого і другого наборів містить параметр для системного часу. 15 UA 98635 C2 5 10 15 20 25 30 35 40 45 50 55 38. Пристрій за п. 37, в якому параметр для системного часу містить індекс суперкадру для суперкадру, в якому передається пілот-сигнал або дані трафіку, або індекс кадру для кадру, в якому передається пілот-сигнал, або дані трафіку, або їх обидва. 39. Пристрій за п. 34, в якому перший набір параметрів містить ідентифікатор (ID) сектора, до якого спочатку здійснює доступ термінал, або ідентифікатор, призначений терміналу за допомогою сектора початкового доступу, або індекс послідовності доступу, який використовується терміналом для початкового доступу до системи, або час початкового доступу термінала до системи, або їх комбінацію. 40. Пристрій за п. 34, в якому другий набір параметрів містить ідентифікатор обслуговуючого сектора або ідентифікатор, призначений терміналу обслуговуючим сектором, або їх обидва. 41. Спосіб бездротового зв'язку, який включає етапи, на яких: формують першу послідовність скремблювання на основі першого набору параметрів; формують пілот-сигнал на основі першої послідовності скремблювання; передають пілот-сигнал в щонайменше один сектор, який включає в себе обслуговуючий сектор для термінала; формують другу послідовність скремблювання на основі другого набору параметрів; скремблюють дані трафіку на основі другої послідовності скремблювання, щоб одержувати скрембльовані дані трафіку; і передають скрембльовані дані трафіку в обслуговуючий сектор. 42. Спосіб за п. 41, в якому формування першої послідовності скремблювання включає етапи, на яких формують перше початкове число на основі першого набору параметрів і формують першу послідовність скремблювання на основі першого початкового числа; і в якому формування другої послідовності скремблювання включає етапи, на яких формують друге початкове число на основі другого набору параметрів і формують другу послідовність скремблювання на основі другого початкового числа. 43. Спосіб за п. 41, в якому щонайменше один з першого і другого наборів містить параметр для системного часу. 44. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, виконаний з можливістю приймати пілот-сигнал від термінала, формувати першу послідовність скремблювання на основі першого набору параметрів, дескремблювати пілот-сигнал, який приймається за допомогою першої послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал, приймати дані трафіку від термінала, формувати другу послідовність скремблювання на основі другого набору параметрів, і дескремблювати дані трафіку, які приймаються за допомогою другої послідовності скремблювання, щоб одержувати дескрембльовані дані трафіку; і запам'ятовуючий пристрій, з'єднаний з щонайменше одним процесором. 45. Пристрій за п. 44, в якому щонайменше один процесор виконаний з можливістю формувати перше початкове число на основі першого набору параметрів, формувати першу послідовність скремблювання на основі першого початкового числа, формувати друге початкове число на основі другого набору параметрів і формувати другу послідовність скремблювання на основі другого початкового числа. 46. Пристрій за п. 44, в якому перший набір містить щонайменше один параметр, незалежний від обслуговуючого сектора для термінала, і в якому другий набір містить щонайменше один параметр, залежний від обслуговуючого сектора. 47. Пристрій за п. 44, в якому щонайменше один з першого і другого наборів містить параметр для системного часу. 48. Спосіб бездротового зв'язку, який включає етапи, на яких: приймають пілот-сигнал від термінала; формують першу послідовність скремблювання на основі першого набору параметрів; дескремблюють пілот-сигнал, який приймається за допомогою першої послідовності скремблювання, щоб одержувати дескрембльований пілот-сигнал; приймають дані трафіку від термінала; формують другу послідовність скремблювання на основі другого набору параметрів; і дескремблюють дані трафіку, які приймаються за допомогою другої послідовності скремблювання, щоб одержувати дескрембльовані дані трафіку. 49. Спосіб за п. 48, в якому формування першої послідовності скремблювання включає етапи, на яких формують перше початкове число на основі першого набору параметрів і формують першу послідовність скремблювання на основі першого початкового числа; і 16 UA 98635 C2 в якому формування другої послідовності скремблювання включає етапи, на яких формують друге початкове число на основі другого набору параметрів і формують другу послідовність скремблювання на основі другого початкового числа. 17 UA 98635 C2 18 UA 98635 C2 19 UA 98635 C2 20 UA 98635 C2 21 UA 98635 C2 22 UA 98635 C2 Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 23
ДивитисяДодаткова інформація
Назва патенту англійськоюPilot-signal transmission in wireless communication system
Автори англійськоюKhandekar, Aamod, Gorokhov, Alexei, Borran, Mohammad, J., Prakash, Rajat
Назва патенту російськоюПередача пилот-сигнала в системе беспроводной связи
Автори російськоюКхандекар Аамод, Горохов Алексей, Борран Мохаммад Дж., Пракаш Раджат
МПК / Мітки
МПК: H04J 13/00, H04L 27/26
Мітки: передача, пілот-сигналу, бездротового, системі, зв'язку
Код посилання
<a href="https://ua.patents.su/25-98635-peredacha-pilot-signalu-v-sistemi-bezdrotovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Передача пілот-сигналу в системі бездротового зв’язку</a>
Способи та пристрої для передачі і прийому пілот-сигналу і даних з швидким стрибкоподібним перестроюванням частоти з мультиплексованим з кодовим розділенням пілот-сигналом у системі мдочр
Номер патенту: 88873
Опубліковано: 10.12.2009
Автори: Тіг Едвард Харрісон, Агравал Авніш
МПК: H04B 7/212, H04B 7/00
Мітки: мультиплексованим, розділенням, перестроюванням, швидким, пристрої, мдочр, кодовим, пілот-сигналом, частоти, стрибкоподібним, передачі, даних, способи, прийому, системі, пілот-сигналу
Формула / Реферат:
1. Спосіб передачі широкосмугового пілот-сигналу у системі безпровідного зв'язку з множинними несучими, який полягає у тому, що обробляють щонайменше один символ пілот-сигналу псевдовипадковим числовим (PN) кодом для одержання послідовності чіпів пілот-сигналу для широкосмугового пілот-сигналу, обробляють символи даних відповідно до схеми модуляції множинних несучих для одержання послідовності чіпів даних, мультиплексують з часовим...
Передача пілот-сигналу і даних в системі мімо з застосуванням субсмугового мультиплексування
Номер патенту: 92353
Опубліковано: 25.10.2010
Автори: Сутівонг Арак, Кхандекар Аамод, Паланкі Раві
МПК: H04L 27/26, H04L 1/00, H04L 5/02, H04B 7/08, H04B 7/06
Мітки: пілот-сигналу, субсмугового, системі, даних, мультиплексування, передача, мімо, застосуванням
Формула / Реферат:
1. Пристрій модуляції SC-FDMA в передавальному пристрої у безпровідній комунікаційній системі, який містить:процесор, який оперує, щоб генерувати послідовність символів контрольного сигналу, визначити набір частотних субдіапазонів, вибраних з щонайменше двох наборів частотних субдіапазонів, причому вибраний набір частотних субдіапазонів містить частотні субдіапазони даних, які використовуються для передачі даних, або частотні...
Нульові пілот-сигнали для виконання оцінки перешкод в системі бездротового зв’язку
Номер патенту: 96539
Опубліковано: 10.11.2011
Автори: Горохов Алєксєй Ю., Цзи Тінфан, Борран Мохаммад Дж., Кхандекар Аамод Д., Бхушан Нага, Агравал Авніш
МПК: H04W 72/00
Мітки: системі, виконання, нульові, перешкод, бездротового, оцінки, пілот-сигнали, зв'язку
Формула / Реферат:
1. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає:визначення ресурсів для передачі нульового пілот-сигналу чарункою в кластері чарунок; іпередачу нульового пілот-сигналу на згаданих ресурсах чарункою, щоб дозволити користувацьким терміналам (UE) оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать їх кластеру.2. Спосіб за п. 1, в якому кожній чарунці в кластері...
Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Номер патенту: 71022
Опубліковано: 15.11.2004
Автор: Соліман Самір С.
МПК: H04B 1/707, H04Q 7/38
Мітки: системі, зв'язку, пошуку, пристрій, спосіб, безпровідного, пілот-сигналу
Формула / Реферат:
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.2. Спосіб за п....
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Ландбі Стайн А., Тідеманн Едвард Г., мол., Оденвалдер Джозеф П.
МПК: H04B 7/26, H04J 11/00, H04B 1/707
Мітки: створення, здійснення, допоміжного, передачі, пілот-сигналу, прийому, пристрій, індивідуальної, спосіб
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Попередній патент: Пластмасовий профіль для віконних, дверних і фасадних елементів
Наступний патент: Мімо передача з явною і неявною циклічною затримкою
Випадковий патент: Розпушувач