Підшипник кочення
Формула / Реферат
Підшипник кочення, що складається із рухомого внутрішнього та нерухомого зовнішнього кілець з розташованими між ними у сепараторі роликами, які знаходяться у взаємодії з кільцями, який відрізняється тим, що твірні бічних поверхонь роликів виконані криволінійними, при цьому параметр кривизни ![]() на торцях роликів і радіус кривизни R твірних взаємозалежні один від одного, причому радіус R визначається шляхом вирішення трансцендентного рівняння
на торцях роликів і радіус кривизни R твірних взаємозалежні один від одного, причому радіус R визначається шляхом вирішення трансцендентного рівняння
 ,
,
де ![]() - довжина ролика;
- довжина ролика; ![]() - коефіцієнт Пуассона;
- коефіцієнт Пуассона; ![]() - кут перекосу валів, що змінюється у межах
- кут перекосу валів, що змінюється у межах ![]() рад;
рад; ![]() - радіальна сила, діюча на підшипник; z - число роликів; Е - модуль пружності матеріалів роликів і кілець;
- радіальна сила, діюча на підшипник; z - число роликів; Е - модуль пружності матеріалів роликів і кілець; ![]() - коефіцієнт;
- коефіцієнт; ![]() - приведений радіус кривизни;
- приведений радіус кривизни; ![]() - радіус ролика;
- радіус ролика; ![]() - радіус поверхні кочення внутрішнього кільця.
- радіус поверхні кочення внутрішнього кільця.
Текст
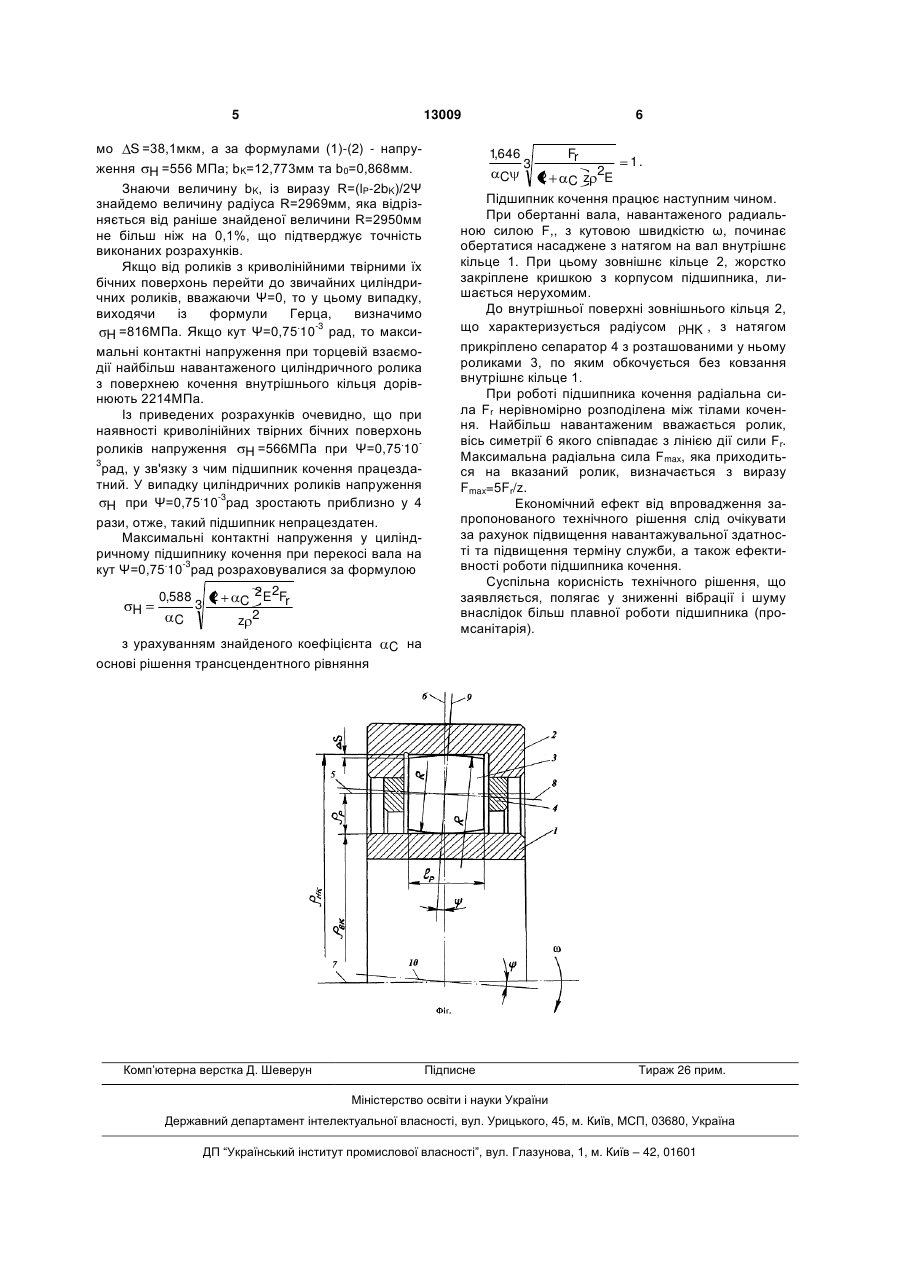
Підшипник кочення, що складається із рухомого внутрішнього та нерухомого зовнішнього кілець з розташованими між ними у сепараторі роликами, які знаходяться у взаємодії з кільцями, який відрізняється тим, що твірні бічних поверхонь роликів виконані криволінійними, при цьому параметр кривизни S l2 / 8R на торцях роликів і P радіус кривизни R твірних взаємозалежні один від одного, причому радіус R визначається шляхом вирішення трансцендентного рівняння 1 692 10 2 , lP 2R 3 Fr , R zE де lP - довжина ролика; - коефіцієнт Пуассона; - кут перекосу валів, що змінюється у межах Корисна модель відноситься до галузі машинобудування. Відомий підшипник кочення, що складається із рухомого внутрішнього та нерухомого зовнішнього кілець з розташованими між ними у сепараторі роликами, які знаходяться у взаємодії з кільцями, що при обертанні внутрішніх кілець, розташованих з натягом на валу, сприймають радіальне навантаження [1: Бейзельман Р.Д., Цыпкин Б.В., Перель Л.Я. Подшипники качения. Справочник. Изд. 5-е, испр. и доп. - М.: Машиностроение, 1967]. Недоліком відомого підшипника кочення є неможливість його експлуатації при перекосах валів внаслідок торцевої взаємодії роликів з поверхнями кочення кілець і виникненням при цьому неприпустимих величин контактних напружень. Найбільш близьким за технічною сутністю до запропонованого рішення є прийнятий за прототип підшипник кочення, який складається з рухомого внутрішнього та нерухомого зовнішнього кілець з розташованими між ними у сепараторі сферічними роликами [2: Чернавский С.А., Ицкович Г.М., Киселѐв Β.Α. и др. Проектирование механических передач. - М.: Машиностроение, 1963 (див. стор.235)]. Недоліком даного підшипника кочення є відсутність даних о взаємозв'язку між собою основних розмірів і параметрів сфери, які призначаються, як правило, виходячи з конструкторського досвіду, що не дає можливості оцінити величини напружень у зоні контакту і працездатність у цілому. Задача корисної моделі - встановлення взаємозв'язку між розмірами підшипника кочення, параметрами криволінійних твірних бічних поверхонь роликів і заданими величинами кутів перекосу валів з метою розробки оптимальної конструкції роликів, спрямованою на підвищення навантажувальної здатності та ефективності роботи підшипника кочення. Для вирішення задачі у підшипнику кочення, що складається з рухомого внутрішнього та нерухомого зовнішнього кілець з розташованими між ними у сепараторі роликами, які знаходяться у взаємодії з кільцями, твірні бічних поверхонь роликів виконані криволінійними, при цьому параметр кривизни S l2 / 8R на торцях роликів і раP діус кривизни R твірних взаємозалежні один від одного, причому радіус R визначається шляхом вирішення трансцендентного рівняння 0 0,001 рад; Fr - радіальна сила, діюча на підшипник; z - число роликів; Е - модуль пружності матеріалів роликів і кілець; / R - коефіцієнт; (19) UA (11) 13009 (13) U P BK / BK P - приведений радіус кривизни; P - радіус ролика; BK - радіус поверхні кочення внутрішнього кільця. 3 1 692 10 2 , lP 13009 2R 3 Fr , R zE де lP - довжина ролика; - коефіцієнт Пуассона; Ψ - кут перекосу валів, що змінюється у межах 0 0,001 рад; Fr - радіальна сила, діюча на підшипник; z - число роликів; Е - модуль пруж ності матеріалів роликів і кілець; / R - кое фіцієнт; P BK / BK P - приведений радіус кривизни; ρP - радіус ролика; BK - радіус поверхні кочення внутрішнього кільця. Порівняльний аналіз з прототипом показує, що запропонований підшипник кочення, який складається з рухомого внутрішнього та нерухомого зовнішнього кілець з розташованими між ними у сепараторі роликами, які знаходяться у взаємодії з кільцями, відрізняється тим, що твірні бічних поверхонь роликів виконані криволінійними, при цьому параметр кривизни S l2 / 8R на торцях роликів і P радіус кривизни R твірних взаємозалежні один від одного, причому радіус R визначається шляхом вирішення трансцендентного рівняння 1 692 10 2 , lP 2R 3 Fr , R zE де lP - довжина ролика; - коефіцієнт Пуас сона; Ψ - кут перекоса валів, що змінюється у межах 0 0,001 рад; Fr - радіальна сила, діюча на підшипник; z - число роликів; Е - модуль пружності матеріалів роликів і кілець; / R - кое фіцієнт; P BK / BK P - приведений радіус кривизни; ρP - радіус ролика; BK - радіус поверхні кочення внутрішнього кільця. Порівняння технічного рішення, що заявляється, не тільки з прототипом, але й з іншими технічними рішеннями в даній галузі техніки, не виявило в них ознак, які б відрізняли технічне рішення, що заявляється, від прототипу, а це дозволяє зробити висновок про відповідність критерію "винахідницький рівень". На Фіг. зображений загальний вид роликового підшипника кочення. Підшипник кочення містить рухоме внутрішнє кільце 1, що змонтовано з натягом на валу, який на Фіг. не показано, і нерухоме зовнішнє кільце 2 з розташованими між ними роликами 3, утримуваними в строго певних положеннях сепаратором 4. Лінії 5 і 6 є осями симетрії ролика 3 при відсутності перекосу вала з віссю обертання 7. При наявності перекосу вала на кут Ψ вісі симетрії 5 і 6 роликів займають положення 8 і 9, а вісь обертання 7 вала - положення 10. У відповідності із перекосом вала на кут Ψ положення ролика 3, рівною мірою сказане відноситься й до інших роликів підшипника кочення, буде відрізнятися від положення, приведеного на фігурі. Для встановлення взаємозв'язку між довжиною lP , радіусом P і числом z роликів, а також між радіусом BK поверхні кочення внутрішнього 4 кільця, радіальної сили Fr, модулем пружності матеріалів Е і коефіцієнтом Пуассона вирішена просторова контактна задача. При вирішенні задачі приймалось, що коефіцієнти Пуассона 1= 2= , а модулі пружності матеріалів E1=Е2=Е. Крім того, передбачалося, що у площині z0y (у площині фігури) при перекосі вала на кут Ψ зберігається модель контакта циліндра радіусом R із площиною, яка має радіус кривизни, що дорівнює нескінченності. У площині z0x, проведеній перпендикулярно площині z0y, при взаємодії ролика 3 із зовнішньою поверхньою рухомого кільця 1 має місце модель контакта двох циліндрів зовнішнього дотику з радіусами P і BK . Однак ролик 3 взаємодіє не тільки з рухомим кільцем 1, але й з нерухомим кільцем 2, де в якості розрахункової виступає модель контакту внутрішнього дотику двух циліндрів з радіусами P і HK , де HK - радіус поверхні кочення зовнішнього кільця. На основі виконаних рішень просторової контактної задачі запишемо рівняння максимальних контактних напружень H , напівдовжини bK і напівширини b 0 площадки дотику H 0,535 3 2E2Fn zR 2 (1) RFn (2) zE Для зберігання умови моделі контакта циліндра радіусом R з площиною скористаємося рівнянням lP 2R 2bK 2 R bK (3) В результаті підстановки у рівняння (3) правої частини виразу (2) отримаємо трансцендентне рівняння для визначення радіусу R 1 692 10 2 , lP 2R 3 Fr (4) R zE При виведенні рівнянь (1)...(4) приймалося, що максимальна радіальна сила Fmax, яка діє на найбільш навантажений ролик, дорівнює 5Fr/z. Визначивши по формулі (4) радіус R, запишемо залежність для знаходження параметра кривизни S на торцях роликів, яка має вигляд l2 P (5) S 8R Для оцінки ефективності технічного рішення, що пропонується, виконаємо розрахунок підшипника кочення, виходячи із lP =30мм; P =15мм; b0 bK ; bK 1948 , . -3 z=18; Ψ=0,75 10 рад; ν=0,3; BK =152,5мм; . 4 Fr=13,3 10 H; Ε=2,12.105MПa. Обчислюємо =13,657мм, потім шляхом графоаналітичного рішення трансцендентного рівняння (4) при довільно узятих значеннях R=(1…5).103 знаходимо шукану величину радіуса R=2950мм та =0,068. По формулі (5) визначає 5 13009 мо S =38,1мкм, а за формулами (1)-(2) - напруження H =556 МПа; bK=12,773мм та b0=0,868мм. Знаючи величину bK, із виразу R=(lP-2bK)/2Ψ знайдемо величину радіуса R=2969мм, яка відрізняється від раніше знайденої величини R=2950мм не більш ніж на 0,1%, що підтверджує точність виконаних розрахунків. Якщо від роликів з криволінійними твірними їх бічних поверхонь перейти до звичайних циліндричних роликів, вважаючи Ψ=0, то у цьому випадку, виходячи із формули Герца, визначимо =816МПа. Якщо кут Ψ=0,75.10-3 рад, то максиH мальні контактні напруження при торцевій взаємодії найбільш навантаженого циліндричного ролика з поверхнею кочення внутрішнього кільця дорівнюють 2214МПа. Із приведених розрахунків очевидно, що при наявності криволінійних твірних бічних поверхонь роликів напруження H =566МПа при Ψ=0,75.103 рад, у зв'язку з чим підшипник кочення працездатний. У випадку циліндричних роликів напруження . -3 H при Ψ=0,75 10 рад зростають приблизно у 4 рази, отже, такий підшипник непрацездатен. Максимальні контактні напруження у циліндричному підшипнику кочення при перекосі вала на кут Ψ=0,75.10-3рад розраховувалися за формулою H 0,588 C 3 2 2 2 C E Fr z 2 з урахуванням знайденого коефіцієнта основі рішення трансцендентного рівняння Комп’ютерна верстка Д. Шеверун 6 1 646 , Fr 1. 2 Cz E Підшипник кочення працює наступним чином. При обертанні вала, навантаженого радиальною силою F,, з кутовою швидкістю ω, починає обертатися насаджене з натягом на вал внутрішнє кільце 1. При цьому зовнішнє кільце 2, жорстко закріплене кришкою з корпусом підшипника, лишається нерухомим. До внутрішньої поверхні зовнішнього кільця 2, що характеризується радіусом HK , з натягом прикріплено сепаратор 4 з розташованими у ньому роликами 3, по яким обкочується без ковзання внутрішнє кільце 1. При роботі підшипникакочення радіальна сила Fr нерівномірно розподілена між тілами кочення. Найбільш навантаженим вважається ролик, вісь симетрії 6 якого співпадає з лінією дії сили Fr. Максимальна радіальна сила Fmax, яка приходиться на вказаний ролик, визначається з виразу Fmax=5Fr/z. Економічний ефект від впровадження запропонованого технічного рішення слід очікувати за рахунок підвищення навантажувальної здатності та підвищення терміну служби, а також ефективності роботи підшипника кочення. Суспільна корисність технічного рішення, що заявляється, полягає у зниженні вібрації і шуму внаслідок більш плавної роботи підшипника (промсанітарія). C 3 2 C на Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRoll bearing
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюПодшипник качения
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16C 19/22
Код посилання
<a href="https://ua.patents.su/3-13009-pidshipnik-kochennya.html" target="_blank" rel="follow" title="База патентів України">Підшипник кочення</a>
Підшипник кочення
Номер патенту: 2074
Опубліковано: 15.10.2003
Автори: Григор'єва Наталія Григорівна, Кайдик Олег Леонтійович, Шабайкович Віктор Антонович, Марчук Віктор Іванович, Божидарник Віктор Володимирович
МПК: F16C 33/66
Формула / Реферат:
Підшипник кочення, який містить зовнішнє та внутрішнє кільця з розташованими між ними тілами кочення, що охоплені сепаратором, який відрізняється тим, що тіла кочення виконані у формі розрізаних впоперек бочкоподібних роликів, при цьому в кожній з частин розрізаного ролика з внутрішнього боку виконаний сліпий осьовий отвір, в якому змонтована розтискна пружина, а поверхня поперечного розрізу виконана у вигляді сходинки.
Підшипник кочення
Номер патенту: 83
Опубліковано: 31.10.1997
Автор: Комарницький Іван Андрійович
МПК: F16C 19/00
Формула / Реферат:
Підшипник кочення, який складається з зовнішнього кільця з біговою доріжкою на внутрішній циліндричній поверхні, концентрично розміщеного внутрішнього кільця з біговою доріжкою на зовнішній циліндричній поверхні, розміщеними між біговими доріжками тіл кочення в виді шариків, при цьому зі сторони одного торця кільця мають дугоподібні виємки для вводу між кільцями додаткових шариків, який відрізняється тим, що має бокову кришку з буртиком,...
Підшипник кочення
Номер патенту: 8392
Опубліковано: 15.08.2005
Автори: Дудін Володимир Юрійович, Буря Олександр Іванович, Ваньков Олександр Юрійович
МПК: F16C 19/00
Формула / Реферат:
Підшипник кочення, що містить внутрішнє та зовнішнє кільця, тіла кочення та сепаратор, що їх розділяє, який відрізняється тим, що ущільнення порожнин між зовнішнім та внутрішнім кільцями, біговими доріжками та тілами кочення виконано з полімерного композиційного матеріалу на основі політетрафторетилену (ПТФЕ), наповненого графітом, при такому співвідношенні компонентів, мас. %: ПТФЕ 60-95 ...
Підшипник кочення і спосіб виготовлення підшипника кочення
Номер патенту: 51035
Опубліковано: 15.11.2002
Автор: Поплавко Леонід Ігоревич
МПК: F16C 19/00
Мітки: виготовлення, підшипник, спосіб, підшипника, кочення
Формула / Реферат:
1. Підшипник кочення, що містить внутрішнє і зовнішнє кільця з біговими доріжками, сепаратор з встановленими у ньому тілами кочення і антифрикційний твердомастильний заповнювач, який відрізняється тим, що містить пластичне мастило, а антифрикційний твердомастильний заповнювач виконаний у вигляді щонайменше однієї торцевої антифрикційної ущільнюючої шайби, яка контактує з біговими доріжками внутрішнього і зовнішнього кільця.2. Підшипник...
Підшипник кочення
Номер патенту: 30175
Опубліковано: 15.11.2000
Автори: Смутко Андрій Миколайович, Смутко Микола Устинович
МПК: F16C 33/38, F16C 33/30, F16C 33/76
Текст:
...є оптимальним. Більше відсоткове співвідношення гра фіту та бронзи може привести до недостатньої міцності зв'язку компонентів, а збільшення кількості епоксидної смоли може знизити якість заповнення підшипника, привести до ускладнення обертання тіл кочення. Переваги підшипників з двобічним ущільненням з антифрикційної композиції слідуючі: 1) Пропоновані підшийники можуть успішно працювати в агресивних середовищах, у вузлах тертя з...
Попередній патент: Лінія для термообробки високоміцного дроту
Наступний патент: Пристрій для керування приводом перемикання передач трансмісії гусеничної машини
Випадковий патент: Спосіб лікування цукрового діабету і профілактика його ускладнень