Автоматичний регулятор непрямої дії
Формула / Реферат
Автоматический регулятор непрямого действия, содержащий снабженный стержневой муфтой, с осью качения измеритель отклонения регулируемого параметра, связанный со стержневой муфтой через ось качения двуплечий рычаг обратной связи, кинематически связанный с одним концом двуплечего рычага обратной связи управляющий потоками рабочей жидкости отсечной золотник, корпус-втулка которого связана с винтовым механизмом настройки автоматического регулятора непрямого действия, кинематически связанный со вторым концом двуплечего рычага обратной связи инерционный катарактный изодром, в котором полости корпус-цилиндра соединены переточной трубкой с дросселирующим вентилем, жестко связанный со штоком поршень снабжен корректирующей инерционной массой с обеспечивающей ей нулевую плавучесть в рабочей жидкости герметичной полостью, а изодромная цилиндрическая пружина одним концом соосно связанная со штоком инерционного гидравлического катарактного изодрома, связанный трубопроводами с корпус-втулкой отсечного золотника, гидравлический сервомотор, шток поршня которого одним концом жестко связан с корпус-цилиндром инерционного гидравлического катарактного изодрома, а второй конец осуществляет через регулирующий орган регулирующее воздействие на регулируемый объект, отличающийся тем, что вторым концом изодромная цилиндрическая пружина, связанная с выполняющим функции охватывающей гидравлический сервомотор дополнительной жесткой обратной связи одноплечим рычагом, один конец которого через тягу кинематически связан с корпус-цилиндром инерционного гидравлического катарактного изодрома, а второй конец через винт тонкой настройки автоматического регулятора непрямого действия кинематически связан с неподвижной опорой.
Текст
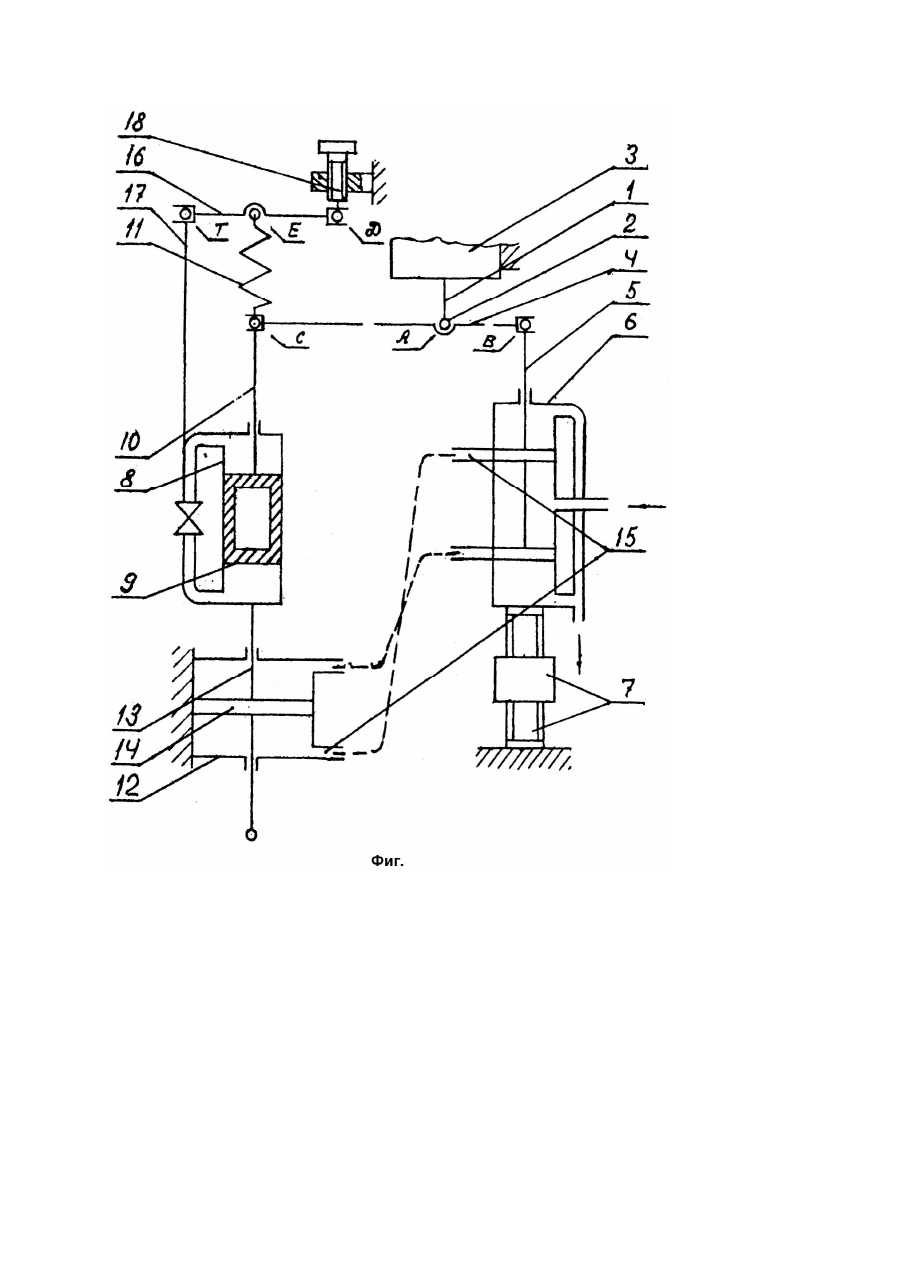
Изобретение относится к области систем автоматического регулирования различных параметров, а более конкретно - к их автоматическим регуляторам непрямого действия, осуществляющих на регулирующий орган регулируемых объектов весьма эффективное трехимпульсное регулирующее воздействие [1, 2]. 1. По отклонению регулируемого параметра. 2. По первой и второй производным повремени от отмеченных отклонений. В настоящее время уже известен такой обеспечивающий высокую точность автоматического регулирования пропорционально-дифференцирующий регулятор, описание которого изложено в патенте Украины на изобретение №271 (дата регистрации 15,01.93.). Несмотря на ряд положительностей данной с отмеченным трехимпульсным законом регулирования конструкции, ее недостатком является отсутствие механизма, обеспечивающего настройку автоматического регулятора на интересующее значение регулируемого параметра. Известные же другие автоматические регуляторы непрямого действия С таким законом регулирования из-за сложности конструкций не получили широкого распространения. Наиболее близким по технической сущности к предлагаемому автоматическому регулятору непрямого действия есть простой по конструкции пропорционально-интегралынодифференциальный автоматический регулятор (ПИД - регулятор) непрямого действия. [3]. Отмеченный с трехимпульсным законом регулирования автоматический регулятор непрямого действия содержит снабженный стержневой муфтой с осью качения измеритель отклонения регулируемого параметра, связанный со стержневой муфтой через ось качения двуплечий рычаг обратной связи, кинематически связанный с одним концом двуплечего рычага обратной связи управляющей потоками рабочей жидкости отсечной золотник, корпус-втулка которого связана с винтовым механизмом настройки автоматического регулятора непрямого действия на интересующее значение регулируемого параметра, кинематически связанный со вторым концом двуплечего рычага обратной связи инерционный гидравлический катарактный изодром, в котором полости корпусцилиндра соединены переточной трубкой с дросселирующим вентилем, жестко связанный с штоком поршень снабжен корректирующей инерционной массой с обеспечивающей ее нулевую плавучесть в рабочей жидкости герметичной полостью, а изодромная цилиндрическая пружина одним концом соосно связана со штоком инерционного гидравлического катарактного изодрома, и вторым концом с неподвижной опорой, связанный трубопроводами с корпус-втулкой отсечного золотника гидравлический сервомотор, шток поршня которого одним концом жестко связан с корпусцилиндром инерционного катарактного изодрома, а второй конец через регулирующий орган осуществляет регулирующее воздействие на регулируемый объект. Существенной особенностью данного автоматического регулятора непрямого действия есть то, что единственная охватывающая гидравлический сервомотор гибкая обратная связь есть дважды инерционной - в связи с гидравлическим сопротивлением гидравлического катарактного изодрома и в связи с массовой корректирующей инерционностью обладающего нулевой плавучестью в рабочей жидкости поршня. Несмотря на ряд положительностей отмеченного автоматического регулятора непрямого действия его неширокое использование объясняется сравнительно невысокой точностью автоматического регулирования. Кроме этого имеется немало регулируемых объектов, в которых данный автоматический регулятор не может быть использован, в связи с наличием регулирующего импульса по интегралу от отклонения регулируемого параметра. В основу изобретения поставлена задача усовершенствования известного автоматического регулятора непрямого действия, состоящая в предлагаемом охвате гидравлического сервомотора дополнительной жесткой обратной связью. Теоретически и экспериментально установлено, что при этом автоматическим регулятором непрямого действия обеспечивается желаемое весьма эффективное регулирующее воздействие по отклонении регулируемого параметра и производным по времени первого и второго порядка от отмеченных отклонений. Это обеспечивает повышение точности автоматического регулирования. Поставленная задача решается тем, что в автоматическом регуляторе непрямого действия, содержащем снабженный стержневой муфтой с осью качения измеритель отклонения регулируемого параметра, связанный со стержневой муфтой через ось качения двуплечий рычаг обратной связи, кинематически связанный с одним концом двуплечего рычага обратной связи управляющий потоками рабочей жидкости отсечной золотник, корпус-втулка которого связана с винтовым механизмом настройки автоматического регулятора непрямого действия, кинематически связанный со вторым концом двуплечего рычага обратной связи инерционный гидравлический катарактный изодром, в котором полости корпус-цилиндра соединены переточной трубкой с дросселирующим вентилем, жестко связанный со штоком поршень снабжен корректирующей инерционной массой с обеспечивающей ей нулевую плавучесть в рабочей жидкости герметичной полостью, а изодромная цилиндрическая пружина концом соосно связанная со штоком инерционного гидравлического катарактного изодрома, связанный трубопроводами с корпус-втулкой отсечного золотнике гидравлический сервомотор шток-поршня которого одним концом жестко связан с корпус-цилиндром инерционного гидравлического катарактного изодрома, а второй конец осуществляет через регулирующий орган регулирующее воздействие на регулируемый объект, согласно изобретения вторым концом изодромная цилиндрическая пружина, связанная с выполняющим функции охватывающей гидравлический сервомотор дополнительной жесткой обратной связи одноплечим рычагом, один конец которого через тягу кинематически связан с корпус-цилиндром инерционного гидравлического катарактного изодрома, а второй конец через винт тонкой настройки автоматического регулятора непрямого действия кинематически связан с неподвижной опорой. При этом регулируемый объект подвергается трем регулирующим воздействиям: а) по отклонению регулируемого параметра; б) по первой и второй производным повремени от отмеченных отклонений. Следует отметить, что при отсутствии массовой корректирующей инерционности поршня гидравлического катарактного изодрома, предлагаемый автоматический регулятор непрямого действия преобразуется в общеизвестный двухимпульсный с регулирующими импульсами по отклонению регулируемого параметра и первой производной по времени от этого отклонения. На чертеже (фиг.) представлена принципиальная конструктивная схема предлагаемого автоматического регулятора непрямого действия, содержащая снабженный стержневой муфтой 1 с осью качения 2 измеритель отклонения регулируемого параметра 3, кинематически связанный со стержневой муфтой двуплечий рычаг обратной связи 4, кинематически связанный с одним концом рычага обратной связи управляющий потоками рабочей жидкости отсечной золотник 5, корпус-втулка 6 которого связана с винтовым механизмом 7 грубой настройки автоматического регулятора, кинематически связанный с вторым концом двуплечего рычага обратной связи инерционный гидравлический катарактный изодром, содержащий корпус-цилиндр 8, снабженный корректирующей инерционной массой и обеспечивающей ее нулевую плавучесть в рабочей жидкости герметичной полостью поршень 9, шток 10 с соосно связанной изодромной цилиндрической пружиной 11, содержащий связанный с опорой корпус-цилиндр 12, шток 13 поршня 14 гидравлический сервомотор, связывающие гидравлический сервомотор с корпус-втулкой отсечного золотника трубопроводы 15, связанный со вторым концом изодромной цилиндрической пружины рычаг дополнительной жесткой обратной связи 16 с воздействующими на него тяги 7 и винта тонкой настройки 18. Через A, B, и C обозначены точки положений двуплечего рычага обратной связи (и кинематически связанных конструктивных элементов), а через Д, E и T - точки положений рычага дополнительной жесткой обратной связи. Обеспечение регулирующего воздействия на регулируемый объект по отклонении значения регулируемого параметра и его производных первого и второго порядка путем предлагаемого охвата гидравлического сервомотора дважды инерционной изодромной и дополнительной жесткой обратными связями есть существенным отличием предлагаемого автоматического регулятора непрямого действия. Работает автоматический регулятор непрямого действия следующим образом. При любом установившемся режиме предлагаемого автоматического регулятора непрямого действия, как и в прототипе, положение точки В двуплечего рычага обратной связи 4 есть постоянным, а изодромная цилиндрическая пружина 11 есть ненагру-женной. Положения же точек A и C, а также T и E, в связи с использованием тяги 17 и рычага дополнительной жесткой обратной связи 16, в отличие от прототипа, определяются значением нагрузки регулируемого объекта. При этом грубая настройка режима осуществляется через винтовой механизм 7, а тонкая настройка -через винт тонкой настройки 18. С точки зрения статики особенностью работы предлагаемого автоматического регулятора есть то, что он обладает незначительным етатизмом. Если принять, что при возмущающем воздействии на регулируемый объект имеет место повышение заданного винтовым механизмом 7 значения регулируемого параметра, вследствие чего муфта 1 с увлекаемым отсечным золотником 5 перемещаются вверх, то согласно представленной на рисунке конструктивной схемы следует, что при этом штоки 13 и 10 (с корректирующей инерционной массой), тяга 17 и точки T, E рычага 16 будут также перемещаться вверх, а пружина 11 становится деформированной. Вследствие этого одновременно происходит: а) самовыключение гидравлического сервомотора; б) желаемое регулирующее воздействие штока 13 на регулирующий орган регулируемого объекта, пропорциональное отклонению регулируемого параметра и производным первого и второго порядка от отмеченных отклонений. Предельная простота конструкции и большие потенциальные возможности предлагаемого автоматического регулятора непрямого действия позволяют надеяться на его широкое использование.
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated controller of indirect action
Автори англійськоюMuzychuk Fedir Maksymovych
Назва патенту російськоюАвтоматический регулятор непрямого действия
Автори російськоюМузичук Федор Максимович
МПК / Мітки
МПК: G06G 3/00, G05B 11/00
Мітки: автоматичний, регулятор, непрямо, дії
Код посилання
<a href="https://ua.patents.su/3-15111-avtomatichnijj-regulyator-nepryamo-di.html" target="_blank" rel="follow" title="База патентів України">Автоматичний регулятор непрямої дії</a>
Автоматичний регулятор непрямої дії
Номер патенту: 1714
Опубліковано: 25.10.1994
Автор: Музичук Федір Максимович
Мітки: автоматичний, дії, непрямо, регулятор
Формула / Реферат:
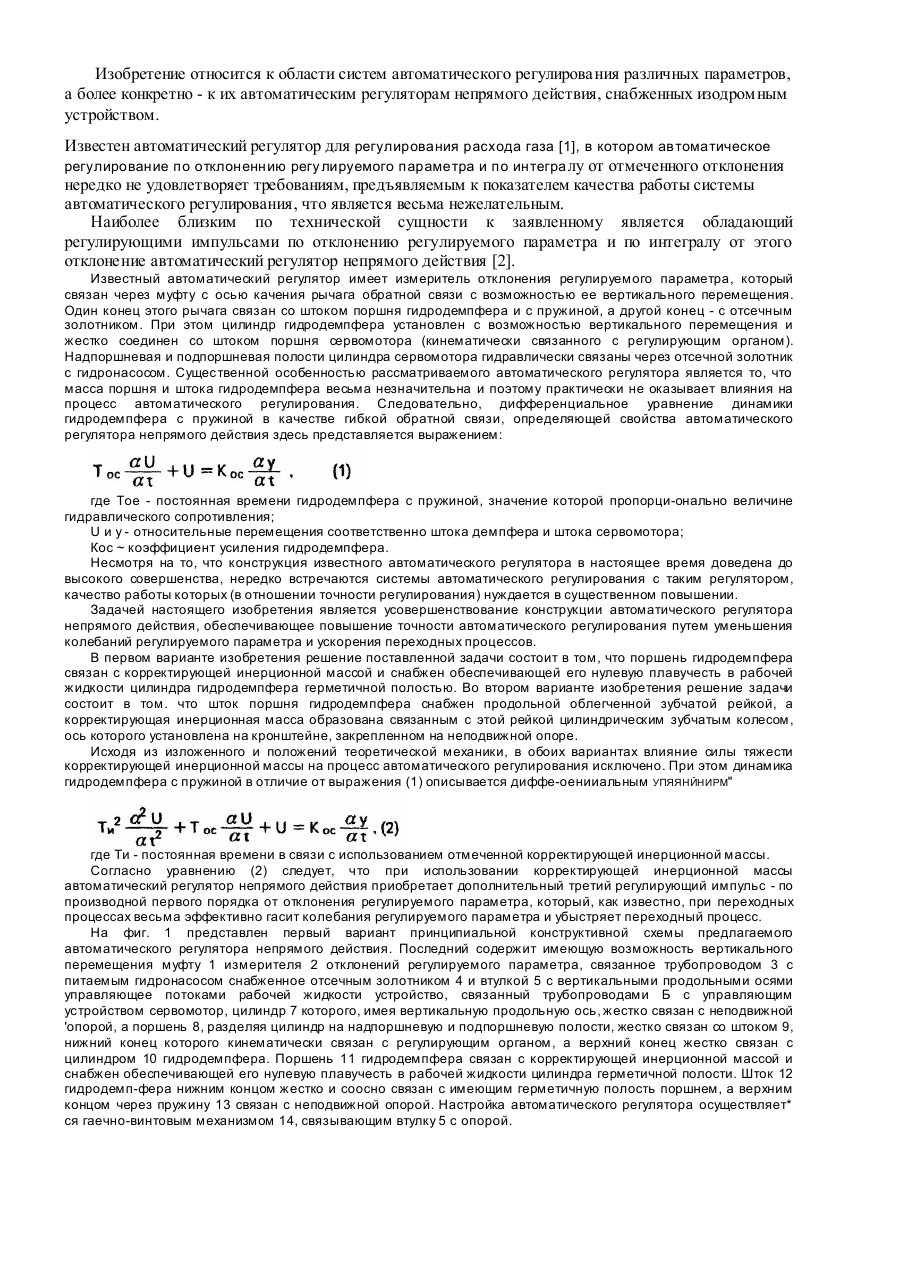
1. Автоматический регулятор непрямого действия, содержащий измеритель отклонения регулируемого параметра, связанный через муфту с осью качения рычага обратной связи с возможностью её вертикального перемещения, причём один конец этого рычага связан со штоком поршня гидродемпфера и с пружиной, а другой конец - с отсечным золотником, при этом цилиндр гидродемпфера установлен с возможностью вертикального перемещения и жестко соединен со штоком...
Ізодромна система автоматичного регулювання непрямої дії
Номер патенту: 1810
Опубліковано: 25.10.1994
Автор: Музичук Федір Максимович
МПК: G05B 11/00
Мітки: ізодромна, регулювання, дії, система, непрямо, автоматичного
Формула / Реферат:
1. Изодромная система автоматического регулирования непрямого действия, содержащая измеритель отклонения регулируемого параметра, механический выход которого связан через муфту с осью качания суммирующего рычага с возможностью вертикального перемещения этой оси, причем одно плечо суммирующего рычага связано со штоком поршня гидродемпфера и с упругим элементом, а другое плечо - со штоком отсечного золотника, а также сервомотор, шток поршня...
Пропорційно-диференційований регулятор музичука
Номер патенту: 271
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: G05B 11/00
Мітки: регулятор, музичука, пропорційно-диференційований
Формула / Реферат:
Пропорционально - дифференцирующий регулятор, содержащий измеритель отклонения регулируемого параметра, муфта которого механически связана с осью качания суммирующего рычага с возможностью ее вертикального перемещения, причем один конец этого рычага соединен со штоком поршня катаракта и с пружиной, которая соединена со штоком поршня сервомотора, кинематически связанного с регулирующим органом, а второй конец суммирующего рычага соединен...
Регулятор частоти обертання двигуна внутрішнього згоряння з наддувом
Номер патенту: 11807
Опубліковано: 25.12.1996
Автори: Варва Василь Костянтинович, Климчук Василь Пилипович
МПК: F02D 23/00
Мітки: двигуна, наддувом, частоти, внутрішнього, згоряння, обертання, регулятор
Формула / Реферат:
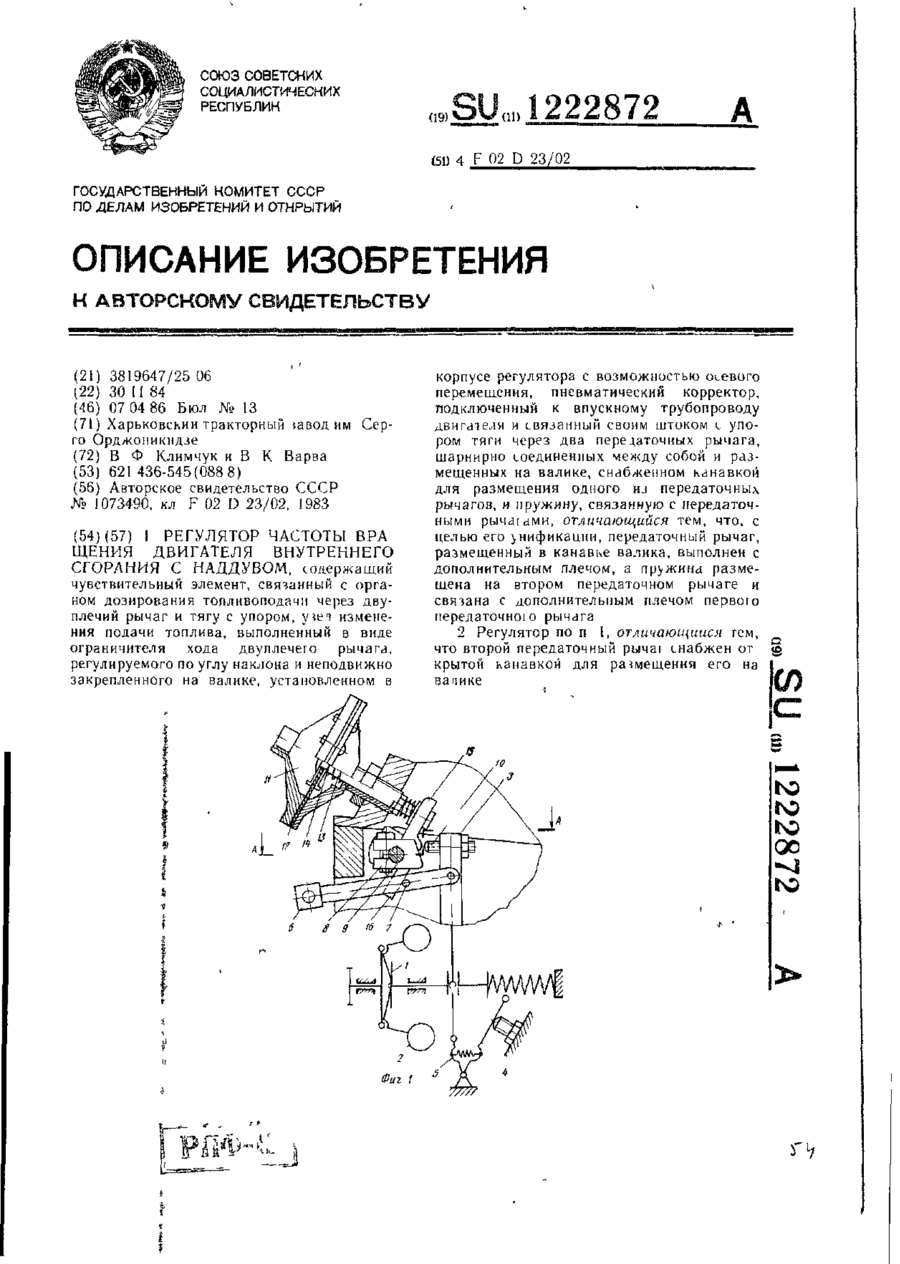
1. Регулятор частоты вращения двигателя внутреннего сгорания с наддувом, содержащий чувствительный элемент, связанный с органом дозирования топливоподачи через двуплечий рычаг и тягу с упором, узел изменения подачи топлива, выполненный в виде ограничителя хода двуплечего рычага, регулируемого по углу наклона и неподвижно закрепленного на валике, установленном в корпусе регулятора с возможностью осевого перемещения, пневматический...
Тернопільський всережимний гідравлічний регулятор частоти обертання двигуна внутрішнього згоряння
Номер патенту: 887
Опубліковано: 15.12.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/00
Мітки: внутрішнього, гідравлічний, всережимний, обертання, частоти, згоряння, тернопільський, регулятор, двигуна
Формула / Реферат:
1. Тернопольский всережимный гидравлический регулятор частоты вращения двигателя внутреннего сгорания, содержащий орган управления, гидравлический насос, исполнительный гидроцилиндр с поршнем и штоком, связанным с органом дозирования, и дроссель с регулирующей иглой, входом и выходом, при этом выход насоса одновременно соединен с рабочей полостью исполнительного гидроцилиндра и входом дросселя, выход которого подключен к сливной магистрали, а...
Попередній патент: Самоспіклива агломераційна шихта
Наступний патент: Спосіб контролю якості з’єднань в процесі лазерного мікрозварювання термопар
Випадковий патент: Шнековий прес для віджимання рідини