Спосіб фазової синхронізації обертання автономно працюючих синхронних електродвигунів та пристрій для його реалізації
Номер патенту: 17084
Опубліковано: 18.03.1997
Автори: Суп'ян Віліамін Якович, Рудик Андрій Вікторович, Суп'ян Олексій Віліамінович
Формула / Реферат
1. Способ фазовой синхронизации вращения автономно работающих синхронных электродвигателей, при котором с помощью фазового детектора сравнивают начальные фазы напряжения с выхода второго датчика обратной связи регулируемого синхронного электродвигателя и опорного напряжения, отличающийся тем, что опорное напряжение снимают с первого датчика обратной связи ведущего синхронного электродвигателя, сигналом рассогласования с выхода фазового детектора, который корректируют и усиливают с помощью корректирующей цепи и усилителя постоянного тока, изменяют величину напряжения управления исполнительного электродвигателя постоянного тока и через редуктор осуществляют поворот статора регулируемого синхронного электродвигателя.
2. Устройство фазовой синхронизации вращения автономно работающих синхронных электродвигателей, содержащее регулируемый синхронный электродвигатель, соединенный со вторым датчиком обратной связи, фазовый детектор, второй вход которого подключен к выходу второго датчика обратной связи, а выход через корректирующую цепь подключен к усилителю постоянного тока, отличающееся тем, что в устройство введены ведущий синхронный электродвигатель, первый датчик обратной связи, исполнительный электродвигатель постоянного тока и редуктор, причем первый вход фазового детектора через первый датчик обратной связи подключен к ведущему синхронному электродвигателю, а выход фазового детектора через корректирующую цепь и усилитель постоянного тока соединен с исполнительным электродвигателем постоянного тока, ротор которого через редуктор соединен со статором регулируемого синхронного электродвигателя.
Текст
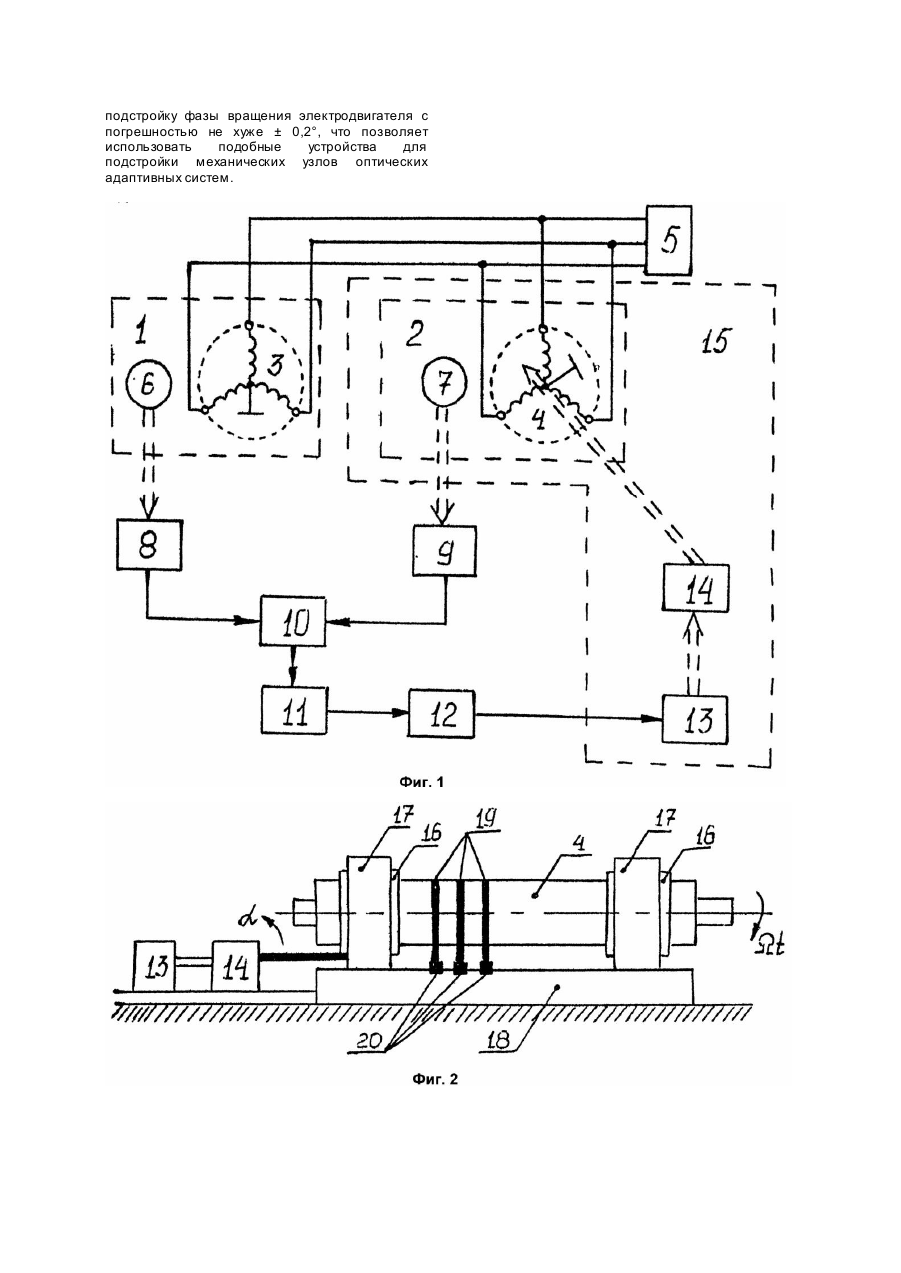
Изобретение относится к области автоматики и измерительной техники и может найти применение в прецизионных автоматических системах электромашинного привода в радиоавтоматических системах, в системах прецизионной стабилизации мгновенной частоты и фазы вращения валов электродвигателей, при синхронной записи звука и изображения, записи информации по нескольким каналам, при корреляционной обработке сигналов. Известен способ прецизионного регулирования мгновенной фазы вращения валов электродвигателей по углу рассогласования (Танский Е.А. Прецизионные системы стабилизации скорости двигателей. - Л.: Энергия, 1975. - С.7, рис.1), заключающийся в том, что с помощью фазового детектора сравнивают полые фазы сигналов с ведущего генератора и датчика обратной связи регулируемого электродвигателя и при наличии рассогласования постоянным напряжением воздействуют на регулир уемый электродвигатель, подстраивая его фазу под фазу ведущего генератора. Недостатком является то, что для управления полной фазой вращения вала электродвигателя сначала необходимо добиться нулевого рассогласования между частотой ведущего генератора и частотой вращения вала (частотой сигнала с датчика обратной связи) электродвигателя. Рассогласование это сводится к нулю лишь при применении частотной фазовой автоподстройки. Наиболее близким по технической сущности к заявляемому является способ прецизионного регулирования мгновенной фазы вращения валов электродвигателей по углу рассогласования (Танский Е.А Прецизионные системы стабилизации скорости двигателей. - Л.: Энергия, 1975. - С.16, рис.7), заключающийся в том, что с помощью фазового детектора сравнивают полные фазы сигналов с датчика обратной связи регулируемого электродвигателя и ведущего генератора, сигналом рассогласования, который корректируют и усиливают, воздействуют на управляемый фазовращатель и изменяют фазу напряжения питания регулируемого электродвигателя. Недостатком способа является то, что при использовании мощных синхронных исполнительных электродвигателей (обычно трехфазных) требуе тся изменение фазы напряжения питания регулируемого электродвигателя в каждой из фаз. Известно устройство автоматического поддержания синфазного вращения автономно работающих электродвигателей (Выховский Ю.И., Шоинцев Е.А. Электроприводы траловых лебедок. - М.: Пищ. пром-сть, 1971), содержащее датчик угла рассогласования, два демодулятора, подключенные входами через разделительный трансформатор к выходу датчика угла рассогласования, и два регулятора частоты вращения электродвигателей, подключенных к выходам демодуляторов. Недостатком является то, что сигнал рассогласования относительного положения ротора электродвигателей, вырабатываемый датчиком рассогласования, преобразуется демодулятором и одновременно, но с разной полярностью, воздействует на регуляторы частоты вращения этих электродвигателей, подтормаживая опережающий электродвигатель и разгоняя отстающий. При этом возрастает ток в контуре одного из электродвигателей, что часто приводит к его перегрузке. Наиболее близким по технической сущности к изобретению является устройство прецизионного регулирования мгновенной фазы вращения валов электродвигателей по углу рассогласования (Танский Е.А. Прецизионные системы стабилизации скорости двигателей. - Л.: Энергия, 1975. - С.16, рис.7), содержащее регулируемый электродвигатель, соединенный с датчиком обратной связи, фазовый детектор, первый вход которого подключен к выходу датчика обратной связи, второй - к выходу ведущего генератора, а выход - через корректирующую цепь и усилитель постоянного тока подключен к управляемому фазовращателю, включенному между источником питания и входом регулируемого электродвигателя. Недостатком устройства является то, что при использовании мощных синхронных исполнительных электродвигателей (обычно трехфазных) требуется применение автономных обмоток возбуждения или устройств фазорасщепления и мощных усилителей питания электродвигателей в каждой из фаз. Это обстоятельство обычно существенно усложняет устройство, приводит к снижению устойчивости и точности работы устройства. При необходимости фазовой синхронизации вращения автономно работающих двух или трех синхронных электродвигателей устройство становится трудно реализуемо. В основу изобретения поставлена задача усовершенствования способа фазовой синхронизации вращения автономно работающих синхронных электродвигателей, в котором вводят операцию механического поворота статора регулируемого синхронного электродвигателя относительно неподвижного статора ведущего синхронного электродвигателя на угол рассогласования, что обеспечивает повышение устойчивости и точности работы устройства, и за счет этого повышается качество регулирования. В основу изобретения поставлена задача усовершенствования устройства фазовой синхронизации вращения автономно работающих синхронных электродвигателей, в котором за счет введения узла поворота статора синхронного электродвигателя обеспечивается повышение устойчивости и точности работы устройства, и за счет этого повышается качество регулирования. Поставленная задача решается тем, что в способе фазовой синхронизации вращения автономно работающих синхронных электродвигателей, при котором с помощью фазового детектора сравнивают начальные фазы напряжения с выхода второго датчика обратной связи регулируемого синхронного электродвигателя и опорного напряжения, согласно изобретению опорное напряжение снимают с первого датчика обратной связи ведущего синхронного электродвигателя, сигналом рассогласования с выхода фазового детектора, который корректируют и усиливают с помощью корректирующей цепи и усилителя постоянного тока, изменяют величину напряжения управления исполнительного электродвигателя постоянного тока и через редуктор осуществляют поворот статора регулируемого синхронного электродвигателя. Поставленная задача решается тем, что в устройстве фазовой синхронизации вращения автономно работающих син хронных электродвигателей, содержащем регулируемый синхронный электродвигатель, соединенный со вторым датчиком обратной связи, фазовый детектор, второй вход которого подключен к выходу второго датчика обратной связи, а выход через корректирующую цепь подключен к усилителю постоянного тока, согласно изобретению в устройство введены ведущий синхронный электродвигатель, первый датчик обратной связи, исполнительный электродвигатель постоянного тока и редуктор, причем первый вход фазового детектора через первый датчик обратной связи подключен к ведущему синхронному электродвигателю, а выход фазового детектора через корректирующую цепь и усилитель постоянного тока соединен с исполнительным электродвигателем постоянного тока, ротор которого через редуктор соединен со статором регулируемого синхронного электродвигателя. На фиг.1 представлена структурная схема устройства, реализующего предложенный способ фазовой синхронизации вращения автономно работающих синхронных электродвигателей; на фиг.2 - конструкция узла поворота статора трехфазного синхронного электродвигателя. Устройство, реализующее способ фазовой синхронизации вращения автономно работающих синхронных электродвигателей, содержит ведущий 1 и регулируемый 2 трехфазные синхронные электродвигатели, статорные обмотки которых 3 и 1 подключены к источнику трехфазного переменного тока 5, а роторы 6 и 7 механически связаны с первым 8 и вторым 9 датчиками обратной связи, фазовый детектор 10, первый вход которого подключен к выходу первого 8 датчика обратной связи, а второй - к выходу второго 9 датчика обратной связи, корректирующую цепь 11, усилитель постоянного тока 12, исполнительный электродвигатель постоянного тока 13, который через редуктор 11 соединен со статором 4 регулируемого синхронного электродвигателя 2. Узел поворота статора трехфазного синхронного электродвигателя 15 (см. фиг.2) состоит из регулируемого трехфазного синхронного электродвигателя 2, статор которого 4 помещен во внутренние кольца 16 опорных подшипников скольжения 17, внешние кольца которых неподвижно закреплены на основании 18, трех ламелевых колец 19, размещенных на статоре 4 трехфазного синхронного электродвигателя 2 и служащих для подведения трехфазного переменного напряжения питания от источника 5 через неподвижные контакты 20, редуктор 14, ось которого соединяется с внутренним кольцом 16 одного из опорных подшипников скольжения 17, и исполнительного электродвигателя постоянного тока 13. Устройство, реализующее предложенный способ фазовой синхронизации вращения автономно работающих син хронных электродвигателей, работает следующим образом. При подключении обмоток статора 3 и 4 трехфазных синхронных электродвигателей 1 и 2 к источнику трехфазного переменного тока 5 угловая скорость вращения роторов 6 и 7 одинакова и равна угловой часто те сети W т.е. система астатическая по частоте и статическая по фазовому рассогласованию, так как начальные угловые положения статоров синхронных электродвигателей относительно роторов (углы рассогласования) j1 и j2 в общем случае не равны между собой. С роторами 6 и 7 синхронных электродвигателей 1 и 2 механически соединены первый 8 и второй 9 датчики обратной связи, на выходах которых при вращении роторов будут действовать напряжения Эти напряжения подаются на входы фазового детектора 10, выходное напряжение которого, пропорциональное фазовому рассогласованию Dj = j1 - j2, через корректирующую цепь 11 и усилитель постоянного тока 12 подается на исполнительный электродвигатель постоянного тока 13, который соединен со статором 4 регулируемого трехфазного синхронного электродвигателя 2 через редуктор 14. Постоянное напряжение рассогласования приводит во вращение исполнительный электродвигатель постоянного тока 13 до тех пор, пока фазовое рассогласование (ошибка) Dj не станет равной нулю, т.е . пока система не сведется к астатизму по фазовому рассогласованию. Поворот статора 4 регулируемого трехфазного синхронного электродвигателя 2 осуществляется на угол Dj = a относительно неподвижного статора 3 ведущего трехфазного синхронного электродвигателя 1. Способ фазовой синхронизации вращения автономно работающих синхронных электродвигателей заключается в следующем. Начальные фазы опорного напряжения с выхода первого 8 датчика обратной связи ведущего синхронного электродвигателя 1 и напряжения с выхода второго 9 датчика обратной связи регулируемого синхронного электродвигателя 2 сравнивают с помощью фазового детектора 10, сигналом рассогласования с выхода фазового детектора, который корректируют и усиливают с помощью корректирующей цепи 11 и усилителя постоянного тока 12, изменяют величину напряжения управления исполнительного электродвигателя постоянного тока 13 и через редуктор 14 осуществляют поворот статора 4 регулируемого синхронного электродвигателя 2 до тех пор, пока сигнал рассогласования не станет равным нулю. С целью увеличения точности замедление редуктора 14 выбирается большим. Для уменьшения обратного вращающего момента, действующего на статор регулируемого синхронного электродвигателя 2, применяются подшипники трения и червячная редукторная передача. В качестве первого 8 и второго 9 датчиков обратной связи можно использовать тахометры. Экспериментальная установка, собранная по структурным схемам фиг.1 и 2 при применении мощных трехфазных синхронных электродвигателей переменного тока типа Г 411 У4, позволила осуществить автоматическую подстройку фазы вращения электродвигателя с погрешностью не хуже ± 0,2°, что позволяет использовать подобные устройства для подстройки механических узлов оптических адаптивных систем.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for phase rotation synchronization of free-running sychronous electric motors and device for its realization
Автори англійськоюSupian Viliamin Yakovych, Supian Oleksii Viliaminovych, Rudyk Andrii Viktorovych
Назва патенту російськоюСпособ фазовой синхронизации вращения автономно работающих синхронных электродвигателей и устройство для его реализации
Автори російськоюСупьян Вилиамин Яковлевич, Супьян Алексей Вилиаминович, Рудык Андрей Викторович
МПК / Мітки
МПК: H02P 5/46
Мітки: реалізації, синхронізації, автономно, обертання, електродвигунів, фазової, працюючих, спосіб, синхронних, пристрій
Код посилання
<a href="https://ua.patents.su/3-17084-sposib-fazovo-sinkhronizaci-obertannya-avtonomno-pracyuyuchikh-sinkhronnikh-elektrodviguniv-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб фазової синхронізації обертання автономно працюючих синхронних електродвигунів та пристрій для його реалізації</a>
Спосіб регулювання реактивної потужності синхронних приводних електродвигунів компресорної станції однакової номінальної потужності
Номер патенту: 6197
Опубліковано: 29.12.1994
Автори: Кобелянський Анатолій Тимофійович, Криворучко Світлана Марківна, Ілієнко Микола Гнатович, Лазаревич Галина Юхимівна, Вайнер Аркадій Йосипович, Осадчій Виктор Порфірьйович, Лазаревич Генадій Генадійович, Алексєєнков Микола Миколайович, Кучеров Андрій Петрович, Осадчук Юрій Григорович
МПК: F04D 27/00
Мітки: регулювання, однакової, електродвигунів, номінальної, компресорної, потужності, спосіб, синхронних, станції, приводних, реактивної
Формула / Реферат:
(57) Способ регулирования реактивной мощности синхронных приводных электродвигателей компрессорной станции равной номинальной мощности, включающий измерение реактивной и активной мощностей, определение полной мощности каждого двигателя и сравнение полной мощности каждого двигателя с граничными значениями, отличающийся тем, что дополнительно измеряют или задают требуемую реактивную мощность электрической сети, измеряют для каждого синхронного...
Пристрій для захисту від перевищення допустимої частоти обертання електродвигуна постійного струму
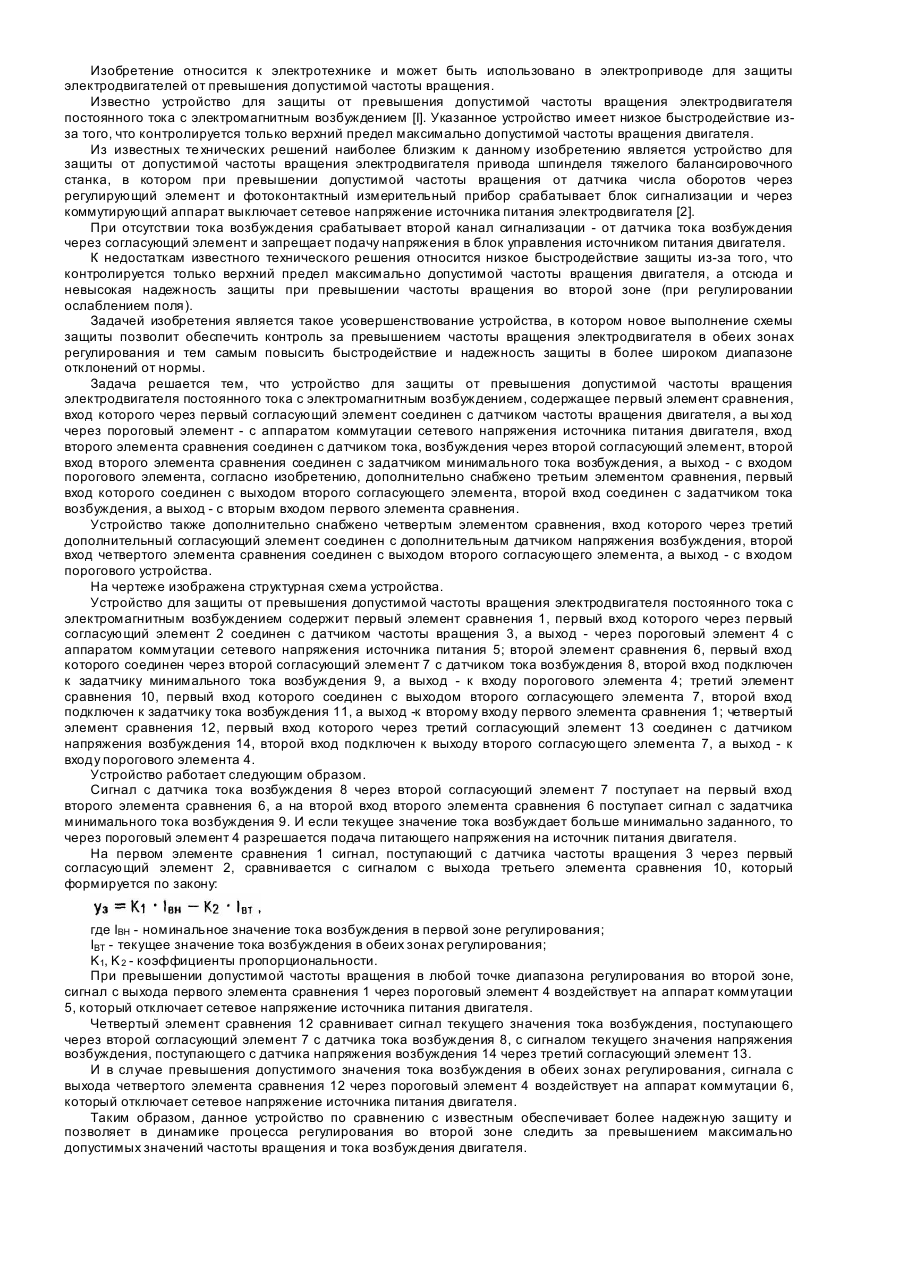
Номер патенту: 2794
Опубліковано: 26.12.1994
Автори: Бардамід Василь Іванович, Монаєв Віктор Іванович
МПК: H02H 7/093
Мітки: частоти, обертання, струму, постійного, пристрій, захисту, електродвигуна, перевищення, допустимої
Формула / Реферат:
1. Устройство для защиты от превышения допустимой частоты вращения электро-двигателя постоянного тока с электромагнитным возбуждением, содержащее первый элемент сравнения, вход которого через первый согласующий элемент соединен с датчиком частоты вращения двигателя, а выход через пороговый элемент - с аппаратом коммутации сетевого напряжения источника питания двигателя, вход второго элемента сравнения соединен с датчиком тока возбуждения...
Пристрій для почергового пуску m електродвигунів
Номер патенту: 12735
Опубліковано: 28.02.1997
Автори: Сердюков Юрій Павлович, Калюжний Володимир Владиславович, Кантіус Лев Йосифович
МПК: H02P 1/16
Мітки: електродвигунів, пуску, пристрій, почергового
Текст:
...ключены к выходам соответствующих реле ЗДС роторов двигателей, кроме гп-го, чю позволяет обеспечить равноускоренный пуск электродвигателей и упростить систему управления электроприводами переменно- 15 го тока. На фиг.1 показан четырехдвигательный групповой электропривод, содержащий асинхронные электродвигатели 1-4 с фазными роторами, параметрический источник 20 тока 5, знергопоглощающее сопротивление 6, неуправляемые вентильные комплекты 7-11...
Спосіб визначення окремих значень амплітудно-фазової частотної характеристики всережимного відцентрового регулятора частоти обертання колінчатого вала тракторного дизельного двигуна
Номер патенту: 33
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: F02D 1/08
Мітки: значень, спосіб, вала, колінчатого, двигуна, відцентрового, характеристики, амплітудно-фазової, частоти, всережимного, частотної, окремих, дизельного, регулятора, визначення, обертання, тракторного
Формула / Реферат:
Формула изобретенияСпособ определения частных значений амплитудно-фазовой частотной характеристики всережимного центробежного регулятора частоты вращения коленчатого вала тракторного дизельного двигателя, характеризующийся тем, что задают частоту вращения валика регулятора, соединяют рычаг управления регулятора с имитатором гармонических колебаний и регистрируют колебания рычага управления и позирующего органа топливного насоса,...
Пристрій для дистанційного контролю становища по черзі працюючих контактних датчиків
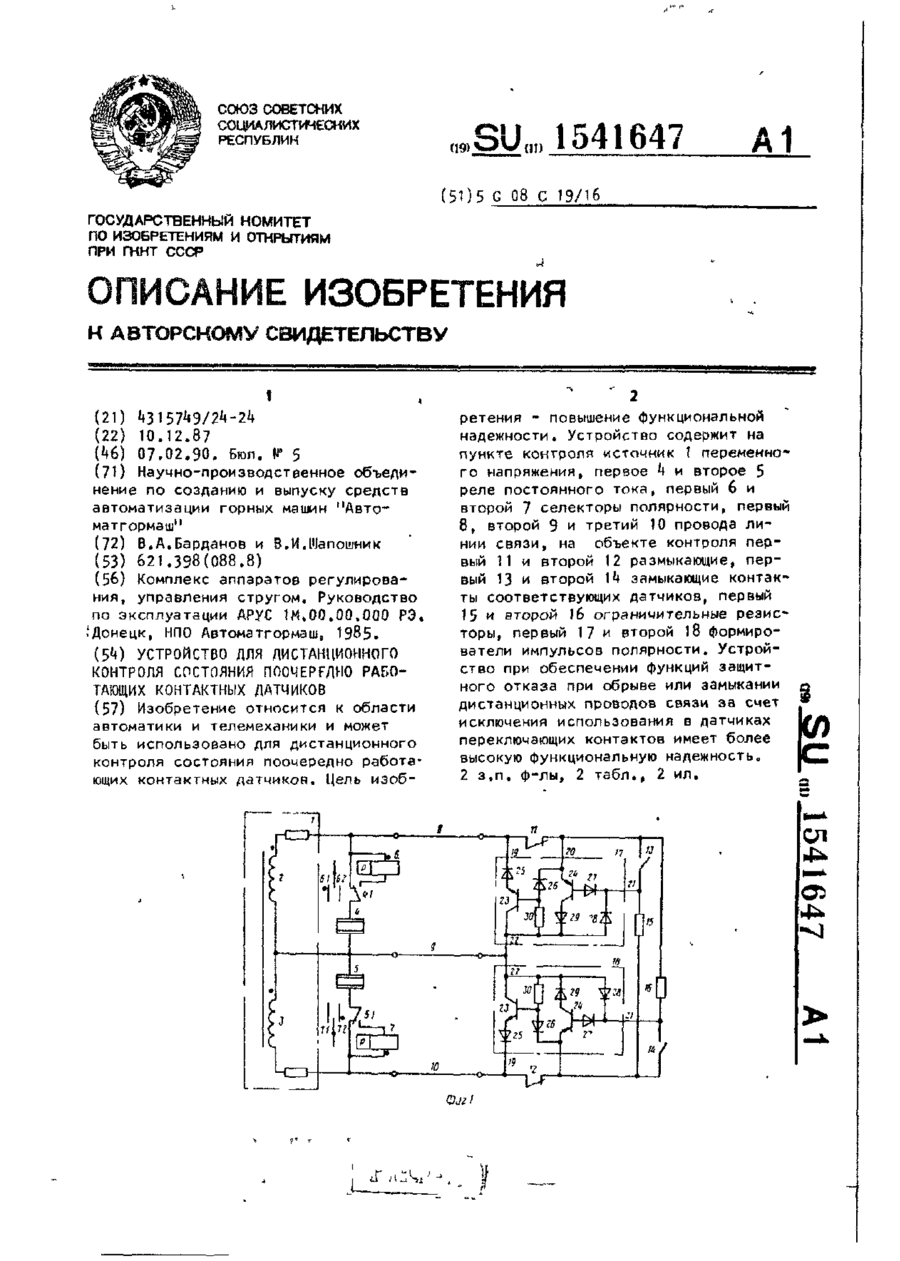
Номер патенту: 7692
Опубліковано: 26.12.1995
Автори: Шапошнік Василь Іванович, Барданов Валерій Олександрович
МПК: G08C 19/16
Мітки: черзі, дистанційного, становища, контактних, датчиків, контролю, працюючих, пристрій
Формула / Реферат:
1. Устройство для дистанционного контроля состояния поочередно работающих контактных датчиков, содержащее на пункте контроля источник переменного напряжения, выполненный в виде трансформатора, начало первой выходной обмотки которого является первым выходом источника переменного напряжения, конец первой выходной обмотки которого соединен с началом второй выходной обмотки и является общим выходом источника переменного напряжения, конец...
Попередній патент: Засоби для інтегральної профілактики та лікування пародонтиту та карієсу
Наступний патент: Спосіб виготовлення біпластмасової труби, футерованої фторполімером
Випадковий патент: Спосіб підсилення стін будинку