Ґрунтообробна машина
Номер патенту: 17163
Опубліковано: 15.09.2006
Автори: Бакум Микола Васильович, Бобрусь Іван Степанович, Нікітін Станіслав Петрович, Нікітіна Олена Станіславівна
Формула / Реферат
Грунтообробна машина, яка включає раму, шарнірно встановлені на ній стовби, на яких закріплені під кутом до напрямку руху (кут атаки) дискові робочі органи та механізми зміни глибини обробітку і з'єднання з енергомодулем, яка відрізняється тим, що стовби на рамі встановлені з можливістю коливання навколо своєї осі із змінною частотою та амплітудою, з можливістю при зменшенні кута атаки одного дискового робочого органу кут атаки сусідніх з ним дискових робочих органів збільшувати і навпаки за допомогою коливального механізму, виконаного, наприклад, у вигляді шарнірно-важільної системи, з'єднаної з кривошипно-шатунним приводом.
Текст
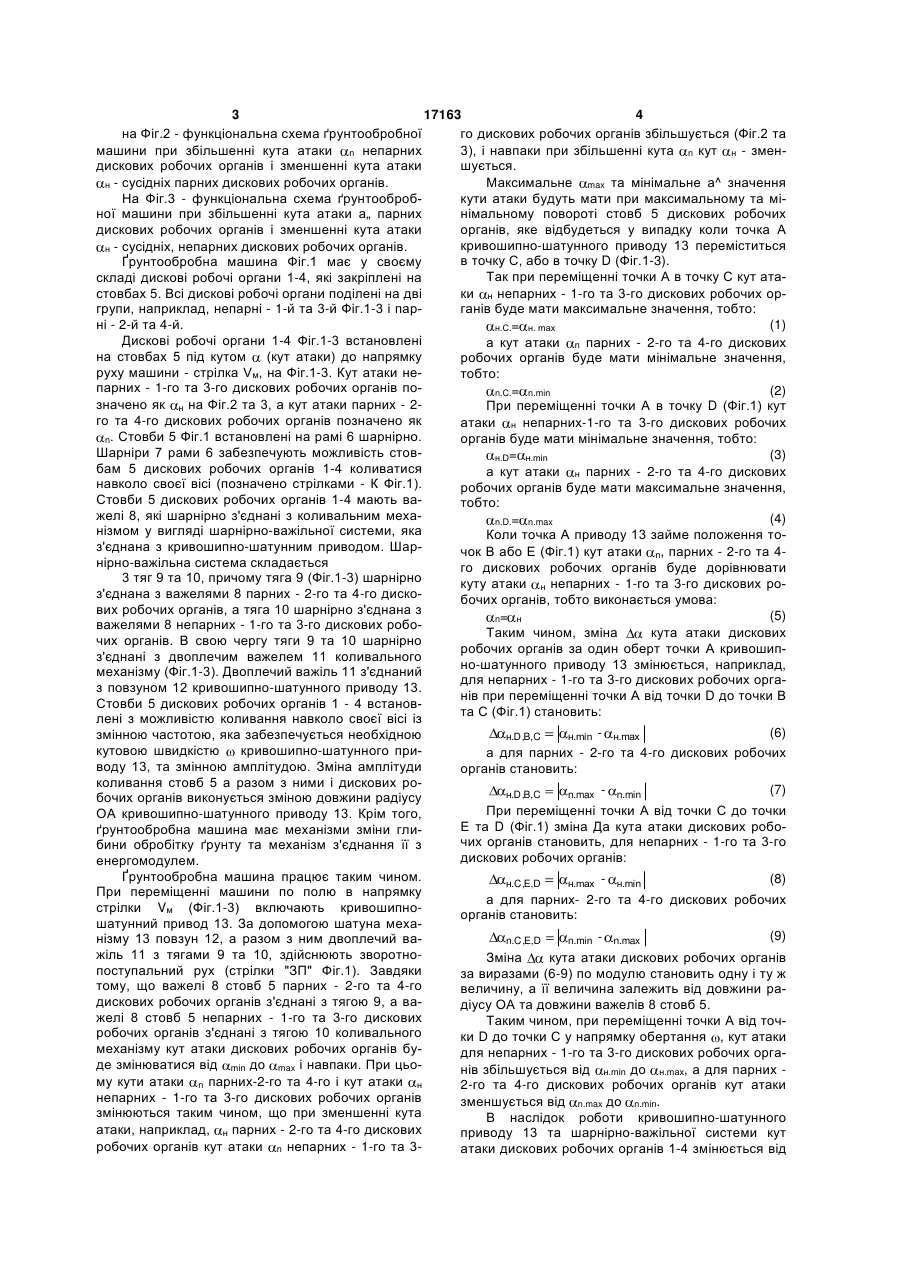
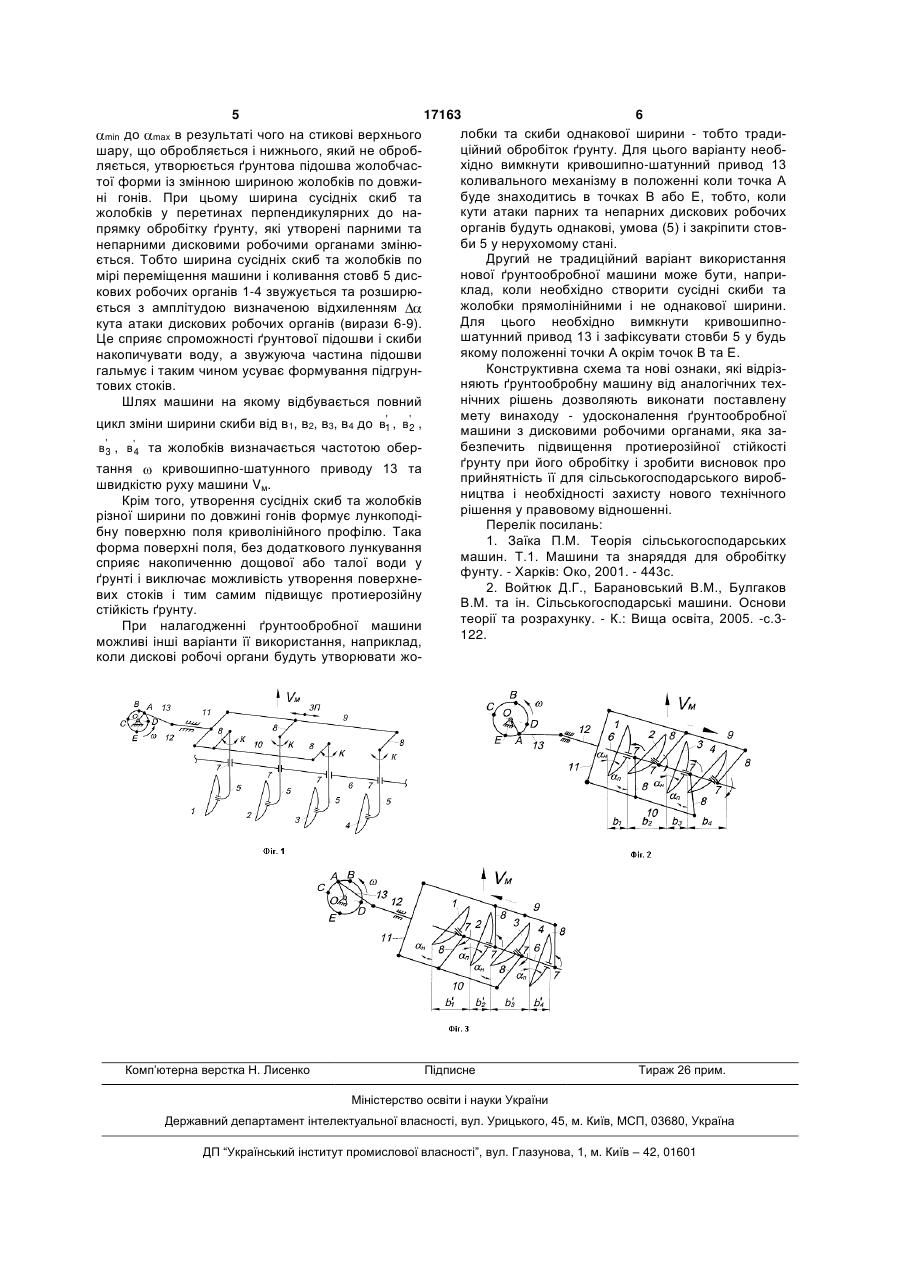
Ґрунтообробна машина, яка включає раму, шарнірно встановлені на ній стовби, на яких закрі 3 17163 4 на Фіг.2 - функціональна схема ґрунтообробної го дискових робочих органів збільшується (Фіг.2 та машини при збільшенні кута атаки n непарних 3), і навпаки при збільшенні кута n кут н - змендискових робочих органів і зменшенні кута атаки шується. Максимальне max та мінімальне а^ значення н - сусідніх парних дискових робочих органів. На Фіг.3 - функціональна схема ґрунтообробкути атаки будуть мати при максимальному та міної машини при збільшенні кута атаки а„ парних німальному повороті стовб 5 дискових робочих дискових робочих органів і зменшенні кута атаки органів, яке відбудеться у випадку коли точка А кривошипно-шатунного приводу 13 переміститься н - сусідніх, непарних дискових робочих органів. в точку С, або в точку D (Фіг.1-3). Ґрунтообробна машина Фіг.1 має у своєму Так при переміщенні точки А в точку С кут атаскладі дискові робочі органи 1-4, які закріплені на стовбах 5. Всі дискові робочі органи поділені на дві ки н непарних - 1-го та 3-го дискових робочих оргрупи, наприклад, непарні - 1-й та 3-й Фіг.1-3 і парганів буде мати максимальне значення, тобто: ні - 2-й та 4-й. (1) н.С.= н. max Дискові робочі органи 1-4 Фіг.1-3 встановлені а кут атаки n парних - 2-го та 4-го дискових на стовбах 5 під кутом (кут атаки) до напрямку робочих органів буде мати мінімальне значення, руху машини - стрілка Vм, на Фіг.1-3. Кут атаки нетобто: парних - 1-го та 3-го дискових робочих органів по(2) n.C.= n.min значено як н на Фіг.2 та 3, а кут атаки парних - 2При переміщенні точки А в точку D (Фіг.1) кут го та 4-го дискових робочих органів позначено як атаки н непарних-1-го та 3-го дискових робочих органів буде мати мінімальне значення, тобто: n. Стовби 5 Фіг.1 встановлені на рамі 6 шарнірно. Шарніри 7 рами 6 забезпечують можливість стов(3) н.D= н.min бам 5 дискових робочих органів 1-4 коливатися а кут атаки н парних - 2-го та 4-го дискових навколо своєї вісі (позначено стрілками - К Фіг.1). робочих органів буде мати максимальне значення, Стовби 5 дискових робочих органів 1-4 мають ватобто: желі 8, які шарнірно з'єднані з коливальним меха(4) n.D.= n.max нізмом у вигляді шарнірно-важільної системи, яка Коли точка А приводу 13 займе положення тоз'єднана з кривошипно-шатунним приводом. Шарчок В або Е (Фіг.1) кут атаки n, парних - 2-го та 4нірно-важільна система складається го дискових робочих органів буде дорівнювати 3 тяг 9 та 10, причому тяга 9 (Фіг.1-3) шарнірно куту атаки н непарних - 1-го та 3-го дискових роз'єднана з важелями 8 парних - 2-го та 4-го дискобочих органів, тобто виконається умова: вих робочих органів, а тяга 10 шарнірно з'єднана з (5) n= н важелями 8 непарних - 1-го та 3-го дискових робоТаким чином, зміна кута атаки дискових чих органів. В свою чергу тяги 9 та 10 шарнірно робочих органів за один оберт точки А кривошипз'єднані з двоплечим важелем 11 коливального но-шатунного приводу 13 змінюється, наприклад, механізму (Фіг.1-3). Двоплечий важіль 11 з'єднаний для непарних - 1-го та 3-го дискових робочих оргаз повзуном 12 кривошипно-шатунного приводу 13. нів при переміщенні точки А від точки D до точки В Стовби 5 дискових робочих органів 1 - 4 встановта С (Фіг.1) становить: лені з можливістю коливання навколо своєї вісі із (6) змінною частотою, яка забезпечується необхідною н.D,B,C н.min - н.max кутовою швидкістю кривошипно-шатунного приа для парних - 2-го та 4-го дискових робочих воду 13, та змінною амплітудою. Зміна амплітуди органів становить: коливання стовб 5 а разом з ними і дискових ро(7) н.D,B,C n.max - n.min бочих органів виконується зміною довжини радіусу При переміщенні точки А від точки С до точки ОА кривошипно-шатунного приводу 13. Крім того, Е та D (Фіг.1) зміна Да кута атаки дискових робоґрунтообробна машина має механізми зміни гличих органів становить, для непарних - 1-го та 3-го бини обробітку ґрунту та механізм з'єднання її з дискових робочих органів: енергомодулем. Ґрунтообробна машина працює таким чином. (8) н.C,E,D н.max - н.min При переміщенні машини по полю в напрямку а для парних- 2-го та 4-го дискових робочих стрілки Vм (Фіг.1-3) включають кривошипноорганів становить: шатунний привод 13. За допомогою шатуна меха(9) нізму 13 повзун 12, а разом з ним двоплечий ваn.C,E,D n.min - n.max жіль 11 з тягами 9 та 10, здійснюють зворотноЗміна кута атаки дискових робочих органів поступальний рух (стрілки "ЗП" Фіг.1). Завдяки за виразами (6-9) по модулю становить одну і ту ж тому, що важелі 8 стовб 5 парних - 2-го та 4-го величину, а її величина залежить від довжини радискових робочих органів з'єднані з тягою 9, а вадіусу ОА та довжини важелів 8 стовб 5. желі 8 стовб 5 непарних - 1-го та 3-го дискових Таким чином, при переміщенні точки А від точробочих органів з'єднані з тягою 10 коливального ки D до точки С у напрямку обертання , кут атаки механізму кут атаки дискових робочих органів будля непарних - 1-го та 3-го дискових робочих оргаде змінюватися від min до max і навпаки. При цьонів збільшується від н.min до н.max, а для парних му кути атаки n парних-2-го та 4-го і кут атаки н 2-го та 4-го дискових робочих органів кут атаки непарних - 1-го та 3-го дискових робочих органів зменшується від n.max до n.min. змінюються таким чином, що при зменшенні кута В наслідок роботи кривошипно-шатунного атаки, наприклад, н парних - 2-го та 4-го дискових приводу 13 та шарнірно-важільної системи кут робочих органів кут атаки n непарних - 1-го та 3атаки дискових робочих органів 1-4 змінюється від 5 17163 6 лобки та скиби однакової ширини - тобто традиmin до max в результаті чого на стикові верхнього ційний обробіток ґрунту. Для цього варіанту необшару, що обробляється і нижнього, який не обробхідно вимкнути кривошипно-шатунний привод 13 ляється, утворюється ґрунтова підошва жолобчасколивального механізму в положенні коли точка А тої форми із змінною шириною жолобків по довжибуде знаходитись в точках В або Е, тобто, коли ні гонів. При цьому ширина сусідніх скиб та кути атаки парних та непарних дискових робочих жолобків у перетинах перпендикулярних до наорганів будуть однакові, умова (5) і закріпити стовпрямку обробітку ґрунту, які утворені парними та би 5 у нерухомому стані. непарними дисковими робочими органами змінюДругий не традиційний варіант використання ється. Тобто ширина сусідніх скиб та жолобків по нової ґрунтообробної машини може бути, напримірі переміщення машини і коливання стовб 5 дисклад, коли необхідно створити сусідні скиби та кових робочих органів 1-4 звужується та розширюжолобки прямолінійними і не однакової ширини. ється з амплітудою визначеною відхиленням Для цього необхідно вимкнути кривошипнокута атаки дискових робочих органів (вирази 6-9). шатунний привод 13 і зафіксувати стовби 5 у будь Це сприяє спроможності ґрунтової підошви і скиби якому положенні точки А окрім точок В та Е. накопичувати воду, а звужуюча частина підошви Конструктивна схема та нові ознаки, які відрізгальмує і таким чином усуває формування підгрунняють ґрунтообробну машину від аналогічних техтових стоків. нічних рішень дозволяють виконати поставлену Шлях машини на якому відбувається повний мету винаходу - удосконалення ґрунтообробної ' ' цикл зміни ширини скиби від в1, в2, в3, в4 до в1 , в 2 , машини з дисковими робочими органами, яка забезпечить підвищення протиерозійної стійкості в '3 , в '4 та жолобків визначається частотою оберґрунту при його обробітку і зробити висновок про тання кривошипно-шатунного приводу 13 та прийнятність її для сільськогосподарського виробшвидкістю руху машини Vм. ництва і необхідності захисту нового технічного Крім того, утворення сусідніх скиб та жолобків рішення у правовому відношенні. різної ширини по довжині гонів формує лункоподіПерелік посилань: бну поверхню поля криволінійного профілю. Така 1. Заїка П.М. Теорія сільськогосподарських форма поверхні поля, без додаткового лункування машин. Т.1. Машини та знаряддя для обробітку сприяє накопиченню дощової або талої води у фунту. - Харків: Око, 2001. - 443с. ґрунті і виключає можливість утворення поверхне2. Войтюк Д.Г., Барановський В.М., Булгаков вих стоків і тим самим підвищує протиерозійну В.М. та ін. Сільськогосподарські машини. Основи стійкість ґрунту. теорії та розрахунку. - К.: Вища освіта, 2005. -с.3При налагодженні ґрунтообробної машини 122. можливі інші варіанти її використання, наприклад, коли дискові робочі органи будуть утворювати жо Комп’ютерна верстка Н. Лисенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSoil-cultivation machine
Автори англійськоюBakum Mykola Vasyliovych, Nikitin Stanislav Petrovych, Bobrus Ivan Stepanovych, Nikitina Olena Stanislavivna
Назва патенту російськоюПочвообрабатывающая машина
Автори російськоюБакум Николай Васильевич, Никитин Станислав Петрович, Бобрусь Иван Степанович, Никитина Елена Станиславовна
МПК / Мітки
МПК: A01B 7/00
Мітки: ґрунтообробна, машина
Код посилання
<a href="https://ua.patents.su/3-17163-gruntoobrobna-mashina.html" target="_blank" rel="follow" title="База патентів України">Ґрунтообробна машина</a>
Гичкозрізальна машина
Номер патенту: 64462
Опубліковано: 16.02.2004
Автор: Клімук Марія Василівна
МПК: A01D 23/02
Мітки: гичкозрізальна, машина
Формула / Реферат:
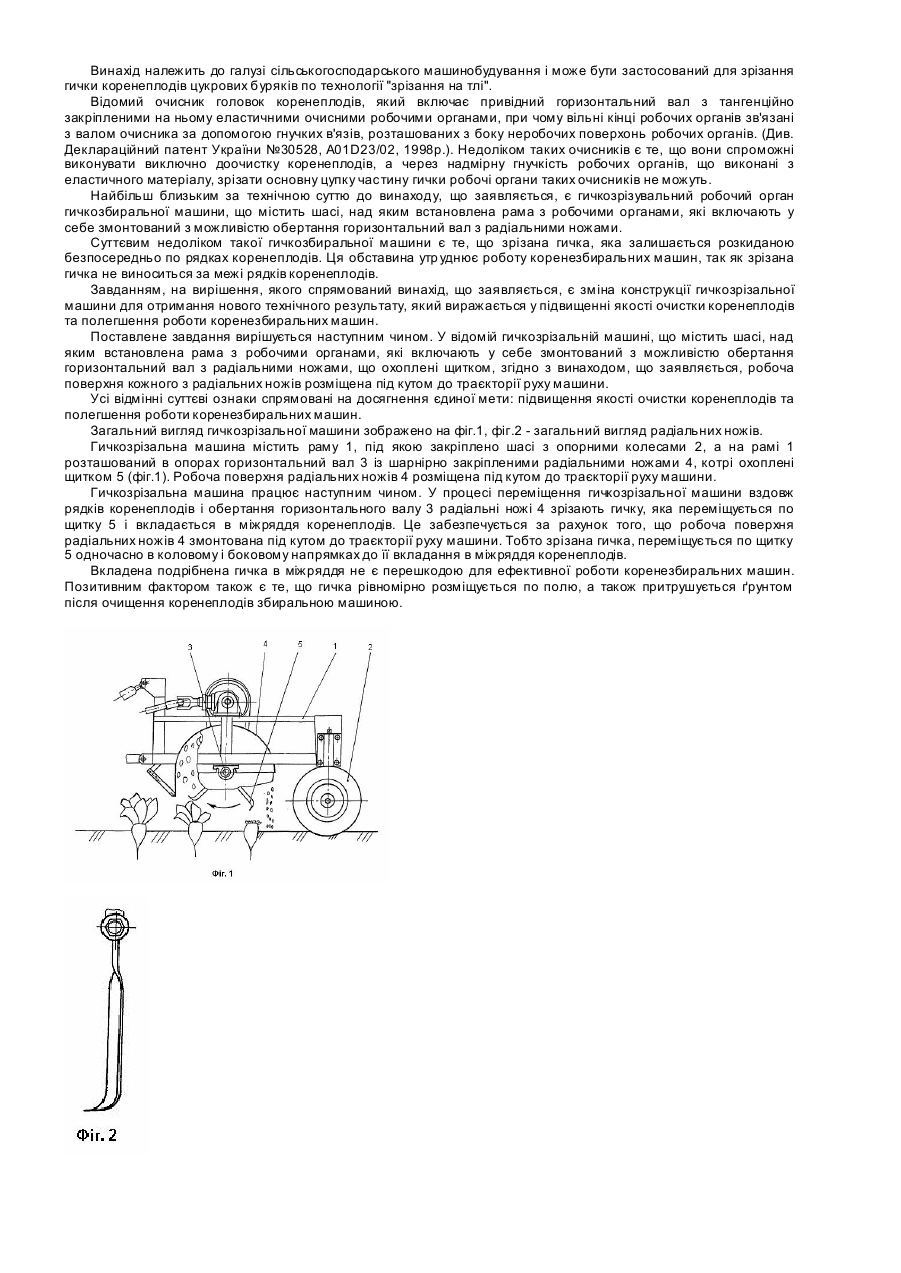
Гичкозрізальна машина, що містить шасі, над яким встановлена рама з робочими органами, які включають у себе змонтований з можливістю обертання горизонтальний вал з радіальними ножами, що охоплені щитком, яка відрізняється тим, що робоча поверхня кожного з радіальних ножів розміщена під кутом до траєкторії руху машини.
Сільськогосподарська машина

Номер патенту: 34557
Опубліковано: 15.03.2001
Автори: Сало Василь Михайлович, Сисолін Петро Васильович, Ляшенко Анатолій Степанович, Бойченко Сергій Федорович, Середа Леонід Іванович
МПК: A01B 59/00
Мітки: машина, сільськогосподарська
Формула / Реферат:
Сільськогосподарська машина, що включає раму з робочими органами і механізмом приводу, чотири колеса - два опорних флюгерних і два опорних приводних, яка відрізняється тим, що одна пара коліс - опорне флюгерне і опорне приводне встановлені послідовно на балансирній підвісці, яка з'єднана з рамою шарніром.
Змішувальна машина

Номер патенту: 2741
Опубліковано: 16.08.2004
Автор: Тур Віктор Володимирович
МПК: B01F 7/08, A21C 1/00, B28C 5/14
Мітки: машина, змішувальна
Формула / Реферат:
Змішувальна машина, що містить горизонтальну змішувальну ємність, в якій паралельно розміщено з можливістю обертання в зустрічних напрямах два вали зі встановленими на них робочими органами, і привід обертання валів, яка відрізняється тим, що кожний з робочих органів виконаний Z-подібним і встановлений на валу по гвинтовій лінії з утворенням двох ділянок, симетричних відносно точки перетину робочим органом осі вала.
Тістомісильна машина
Номер патенту: 62460
Опубліковано: 15.12.2003
Автори: Стадник Ігор Ярославович, Лісовенко Олексій Тимофійович, Котенко Анатолій Георгійович
МПК: A21C 1/00
Мітки: машина, тістомісильна
Формула / Реферат:
Тістомісильна машина, що складається з місильної камери, місильних органів та приводу, яка відрізняється тим, що місильна камера має циліндричну форму з боковою кришкою, на якій змонтовані гальмівні лопаті, установлені з можливістю регулювання їх робочої поверхні, змішувальна лопать виконана у вигляді гвинтової смуги з профілем, подібним перерізу плавника дельфіна, з кутом атаки 30... 33°.
Опозитна поршнева машина
Номер патенту: 64108
Опубліковано: 16.02.2004
Автори: Ахтямов Альберт Мінахметович, Коміссаров Сергій Сергійович
МПК: F02B 75/26, F01B 9/00
Мітки: поршнева, опозитна, машина
Формула / Реферат:
Опозитна поршнева машина, яка містить кривошип, шарнірно з’єднаний з двома шатунами, кожний з яких шарнірно з’єднано з крейцкопфом, що знаходиться у нерухомих напрямних, при цьому крейцкопфи установлено опозитно і через штоки з’єднано з опозитними поршнями, які установлено в опозитних циліндрах з утворенням робочих камер, яка відрізняється тим, що кривошип шарнірно з’єднано з одним із шатунів, який другим кінцем шарнірно зв’язаний з...
Попередній патент: Спосіб очистки промивних вод від іонів металів й амонію
Наступний патент: Обертовий дисковий плуг
Випадковий патент: Друковане видання