Спосіб контролю неспіввісності віддалених валів
Номер патенту: 27073
Опубліковано: 10.10.2007
Автори: Романов Віктор Олександрович, Грядущий Володимир Борисович, Цванг Віра Володимирівна, Тімохін Юрій Віталійович
Формула / Реферат
Спосіб контрою неспіввісності віддалених валів, відповідно до якого на бічній поверхні вала першої машини встановлюють діаметрально протилежно два стояки, на яких закріплюють вимірювальні прилади, а на бічні поверхні трансмісійного вала також діаметрально протилежно закріплюють стояки з поверхнями відліку, одночасно обертають вали на кути 90 °, 180 °, 270 ° від початкового, який відрізняється тим, що вали машин виставляють паралельно і на обох боках трансмісійного вала встановлюють стояки з приладами, розташованими перпендикулярно стоякам з поверхнями відліку, а на валах машин закріплюють відповідні стояки, і за отриманими результатами розраховують кутове відхилення
![]()
і радіальне
![]() ,
,
де ![]() - результати вимірювань приладів, розташованих на валах,
- результати вимірювань приладів, розташованих на валах,
![]() - результати вимірювань приладів, розташованих на трансмісійному вала,
- результати вимірювань приладів, розташованих на трансмісійному вала,
![]() - кутове відхилення трансмісійного вала,
- кутове відхилення трансмісійного вала,
![]() - кут прямокутного трикутника, рівний (90 °-
- кут прямокутного трикутника, рівний (90 °-![]() ).
).
Текст
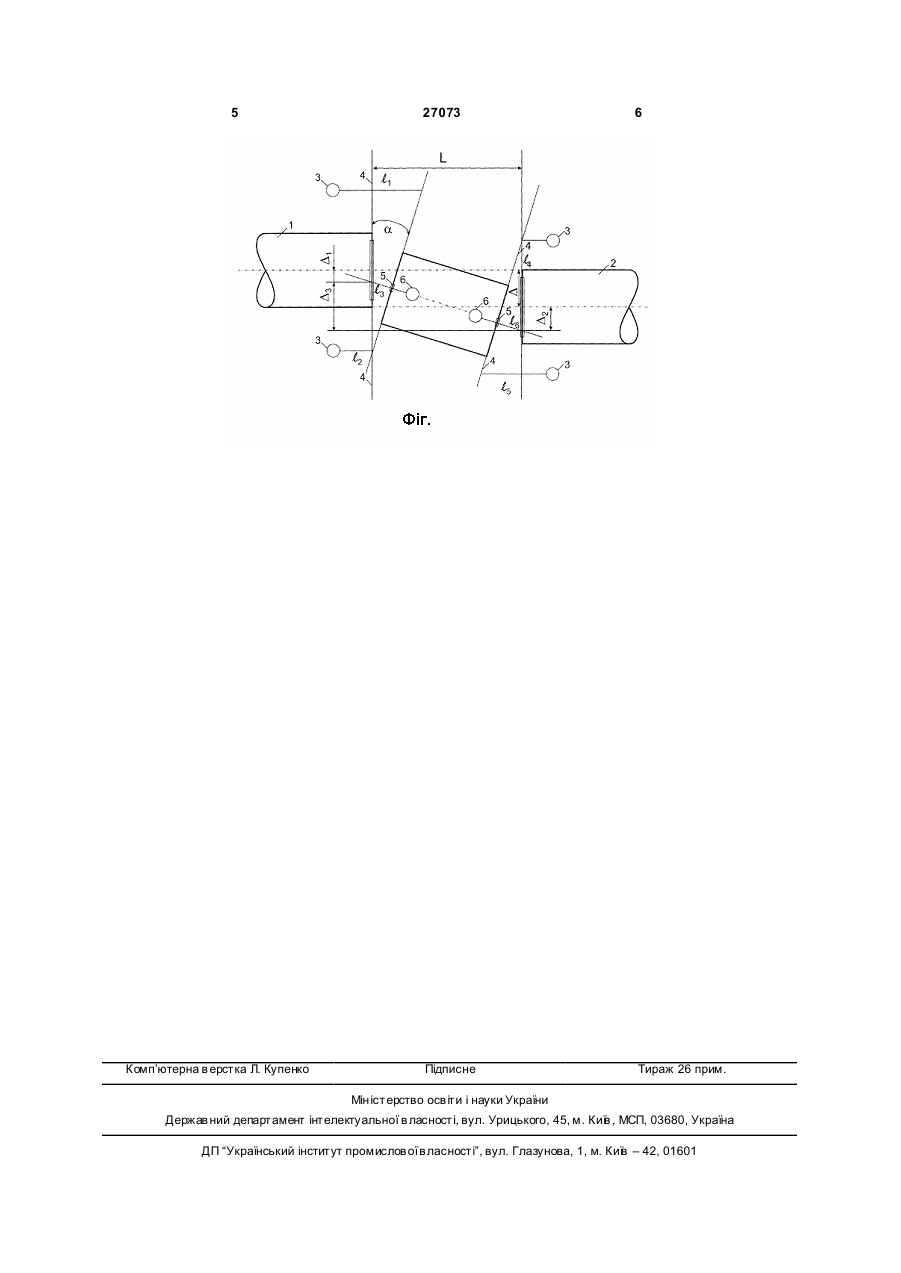
Спосіб контрою неспіввісності віддалених валів, відповідно до якого на бічній поверхні вала першої машини встановлюють діаметрально протилежно два стояки, на яких закріплюють вимірювальні прилади, а на бічні поверхні трансмісійного вала також діаметрально протилежно закріплюють стояки з поверхнями відліку, одночасно обертають вали на кути 90 °, 180 °, 270 ° від початкового, який відрізняє ться тим, що вали машин виставляють паралельно і на обох боках трансмісійного вала встановлюють стояки з приладами, розташованими перпендикулярно стоякам з поверхнями відліку, а на валах машин закріплюють відповідні стояки, і за отриманими результатами розраховують кутове відхилення l -l tg a = 1 2 D і радіальне Спосіб контролю неспіввісності валів відноситься до галузі машинобудування і може бути використаний для центрівки крупних стаціонарних машин, що сполучені із зубчатими муфтами трансмісійним валом, працюють в умовах вибухонебезпечного середовища. Відомий спосіб контролю неспіввісності валів [декларативний патент України №60854А, G01B5/25, опублікований 15.10.2003, Бюл. №10, 2003], відповідно до якого на одному валу жорстко закріплюють стояки з вимірювальними приладами, встановленими на консольному упорі, а на другому закріплюють стояку відліковою поверхнею на консольному упорі і з їх допомогою отримують два радіальні виміри, по яких розраховують параметри неспіввісності - кутове і радіальне відхилення. При цьому точність вимірювань досягається тільки при відстані між стійками не більше ніж 90мм із-за значної деформації консольних упорів. Для розширення діапазону відстані між стояками на протилежному від приладів і упорів боці встановлюють врівноважувальні вантажі, проте гранична відстань, що забезпечує достатню точ ність при цьому не перевищує 200мм, що значно менше необхідної відстані для крупних стаціонарних машин. Так, наприклад, для більшості крупних осьових вентиляторів головного провітрювання шахт сполучених з убчатими муфтами, між якими розташований трансмісійний вал, відстань між стояками складає від 270 до 650мм. Відомий також, прийнятий нами за прототип спосіб [Руководство по ревизии и наладке главных вентиляторных установок шахт / Гофман А.Ф. и др. - М.: Недра, 1981. - c.60], відповідно до якого при контролі неспіввісності машин, сполучених трансмісійним валом за допомогою зубчатих муфт на бічній поверхні валу першої машини встановлюють діаметрально протилежно два стояки, на яких закріплюють вимірювальні прилади, а на бічній стороні трансмісійного валу також діаметрально протилежно закріплюють стояки, які мають поверхні для відліку вимірювальних приладів, а на валу др угої машини і протилежному боці трансмісійного валу аналогічно встановлюють вимірювальні прилади і стояки, проводять вимірювання од æ l -l ö æ l -l ö D = ç 1 2 - l 3Cos b ÷tgb + (L - l3 )Sin a - ç l6 Cos a - 5 4 ÷ tgb 2 ø è 2 ø è , (19) UA (11) 27073 (13) U де l1, l2 , l4 , l5 - результати вимірювань приладів, розташованих на валах, l3 , l6 - результати вимірювань приладів, розташованих на трансмісійному валі, a - кутове відхилення трансмісійного вала, b - кут прямокутного трикутника, рівний (90 °- a ). 3 27073 ночасно обертаючи вали на кути 90°, 180°, 270° від початкового. Діапазон відстані точних вимірювань в цьому випадку значно більше (за рахунок відсутності консольних упорів), але недолік такого способу контролю полягає в тому, що отримують лише один параметр неспіввісності - кутове відхилення. Тоді як для точного розрахунку розмірів, що коректують, необхідно мати також величину радіального відхилення. Крім того згаданий спосіб має недостатню точність і нераціональну послідовність контролю відхилення валів, що полягає в тому, що виконують по два виміри в діаметрально протилежних напрямах, а їх суми використовують для розрахунку кутового відхилення осей валів машин, і таким чином отримують результат з накопиченою погрішністю і значною розбіжністю між реальним і розрахованим значенням кутового відхилення. Це вимушує усувати неспіввісність за допомогою процесу послідовного наближення до значення в межах допуску, удаючись до декількох серій вимірювань, і переміщень машин, що значно завищує трудомісткість робіт. Пропонована корисна модель вирішує задачу створення способу контролю неспіввісності валів, який при його здійсненні забезпечує досягнення технічного результату, що полягає в підвищенні точності. Поставлене завдання вирішується шляхом того, що при реалізації способу контролю неспіввісності валів на бічній поверхні валу першої машини встановлюють діаметрально протилежно два стояки, на яких закріплюють вимірювальні прилади, а на бічні поверхні трансмісійного валу також діаметрально протилежно закріплюють стояки з поверхнями відліку, а на валу другої машини і протилежному боці трансмісійного валу аналогічно встановлюють аналогічні вимірювальні прилади і стояки, одночасно обертають вали на кути 90°, 180° і 270° від початкового. Згідно корисної моделі осі валів машин встановлюють паралельно, наприклад, за допомогою инклинометра, на обох сторонах трансмісійного валу встановлюють стійки з приладами перпендикулярно стійкам з поверхнями відліку, а на валах машин закріплюють відповідні стійки з поверхнями відліку, і по отриманих результатах розраховують кутове відхилення l -l tg a = 1 2 D і радіальне æ l -l ö æ l -l ö D = ç 1 2 - l 3Cos b ÷tgb + (L - l3 )Sin a - ç l6 Cos a - 5 4 ÷ tgb , 2 ø è 2 ø è де l1, l2, l4, l5 - результати вимірювань приладів, розташованих на валах; l3, l6 - результати вимірювань приладів розташованих на трансмісійному валу; 4 a - кутове відхилення трансмісійного валу; b - кут прямокутного трикутника рівний (90°-a). Спосіб, що заявляється, реалізується таким чином. На бічній поверхні валу першої машини встановлюють діаметрально протилежно дві стійкі, на яких закріплюють вимірювальні прилади, на бічній стороні трансмісійного валу закріплюють діаметрально протилежно стійкі, що мають поверхні відліку, а на валу др угої машини і протилежній стороні трансмісійного валу також встановлюють вимірювальні пристрої і стійки, на трансмісійному валу закріплюють стійки з приладами перпендикулярно стійкам з поверхнями відліку, а на валах машин відповідні стійки з поверхнями відліку, за допомогою просторового вимірювання напряму осей валів машин, наприклад, инклинометра, паралельно виставляють вали. Після чого вали обертають в одному напрямі на кути 90°, 180°, 270° від попереднього, і в кожному з цих положень виконують вимірювання. З чотирикутників ABCD і A1B1C1D1 шляхом нескладних розрахунків отримують кутове l -l tg a = 1 2 D і радіальне відхилення осей æl -l ö æ l -l ö D = ç 1 2 - l 3 Cosb ÷tgb + (L - l3 )Sina - ç l 6 Cosa - 5 4 ÷ tgb ç 2 ÷ ç 2 ÷ è ø è ø На Фіг. приведена схема пристрою, за допомогою якого реалізується спосіб контролю неспіввісності валів. Пристрій містить вали 1 і 2, вимірювальні прилади 3, розташовані на стояках 4, закріплених на валах машин, стійкий 5 і приладів 6, розташованих на трансмісійному валу на рівновіддаленій відстані від стійок 4. Після отримання вимірювань вали обертають в одному напрямі на 90°, 180°, 270° і кожного разу отримують вимірювання, по яких розраховують горизонтальну і вертикальну неспіввісність валів по вищенаведеній формулі. У способі контролю неспіввісності валів, що реалізовується, попередньо усувають кутовий зсув, виконують вимірювання і розраховують кутове відхилення трансмісії валу і радіальне відхилення осей машин, що дозволяє запобігти появі погрішностей і отримати точні координати взаємного позиціонування машин. Експериментальний зразок пристрою випробуваний на лабораторному стенді. Джерела інформації: 1. Патент України №62873, МПК G01B11/ 27 , 2003. 2. Руководство по ревизии и наладке главных вентиляторных установок шахт / А.Ф. Гофман и др. - М.: Недра, 1981. - с.60. 5 Комп’ютерна в ерстка Л. Купенко 27073 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for checking misalignment of distant shafts
Автори англійськоюRomanov Viktor Oleksandrovych, Hriaduschyi Volodymyr Borysovych, Tsvanh Vira Volodymyrivna, Tymokhin Yurii Vitaliiovych
Назва патенту російськоюСпособ контроля несоосности отдаленных валов
Автори російськоюРоманов Виктор Александрович, Грядущий Владимир Борисович, Цванг Вера Владимировна, Тимохин Юрий Витальевич
МПК / Мітки
МПК: G01B 5/24
Мітки: спосіб, віддалених, контролю, неспіввісності, валів
Код посилання
<a href="https://ua.patents.su/3-27073-sposib-kontrolyu-nespivvisnosti-viddalenikh-valiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю неспіввісності віддалених валів</a>
Спосіб контролю неспіввісності валів
Номер патенту: 21169
Опубліковано: 15.03.2007
Автори: Тімохін Юрій Віталійович, Гучин Вадим Павлович, Грядущий Володимир Борисович, Романов Віктор Олександрович, Мялковський Валентин Йосипович
МПК: G01B 11/27
Мітки: неспіввісності, валів, контролю, спосіб
Формула / Реферат:
Спосіб контролю неспіввісності валів, відповідно до якого на бічній поверхні першого вала встановлюють механізм закріплення із джерелом лазерного випромінювання, а на бічній поверхні другого вала встановлюють механізм закріплення з телевізійною камерою, джерело лазерного випромінювання розташовують у горизонтальній площині, а телевізійну камеру розташовують паралельно геометричній осі таким чином, щоб відображення світлової плями на екрані...
Пристрій для виміру неспіввісності валів машин
Номер патенту: 60854
Опубліковано: 15.10.2003
Автори: Мялковський Валентин Йосипович, Манець Іван Григорович, Романов Віктор Олександрович
МПК: G01B 5/24
Мітки: пристрій, машин, неспіввісності, валів, виміру
Формула / Реферат:
Пристрій для вимірювання неспіввісності валів машин, що містить механізм закріплення з гнучким ланцюгом, стійки й упори з вимірювальними приладами, який відрізняється тим, що в напрямку, протилежному приладам і упорам, встановлюється зрівноважувальний вантаж з масою, яка розраховується за формулою :де
Спосіб контролю співвісності валів
Номер патенту: 62873
Опубліковано: 15.12.2005
Автори: Грядущий Борис Абрамович, Логвиненко Володимир Іванович, Чехлатий Микола Олександрович, Мялковський Валентин Йосипович
МПК: G01B 5/24, G01B 11/27
Мітки: співвісності, спосіб, контролю, валів
Формула / Реферат:
Спосіб одержання металевого порошку включає підготовку шихти на основі стружкових відходів чавуну, її термічну обробку, подрібнення спеку та розсів отриманого порошку. В процесі підготовки шихти стружкові відходи чавуну змішують з порошком або стружкою титану. Термічна обробка шихти включає відпал в середовищі нейтральних газів, водню або в вакуумі.
Пристрій для вимірювання неспіввісності валів роторів
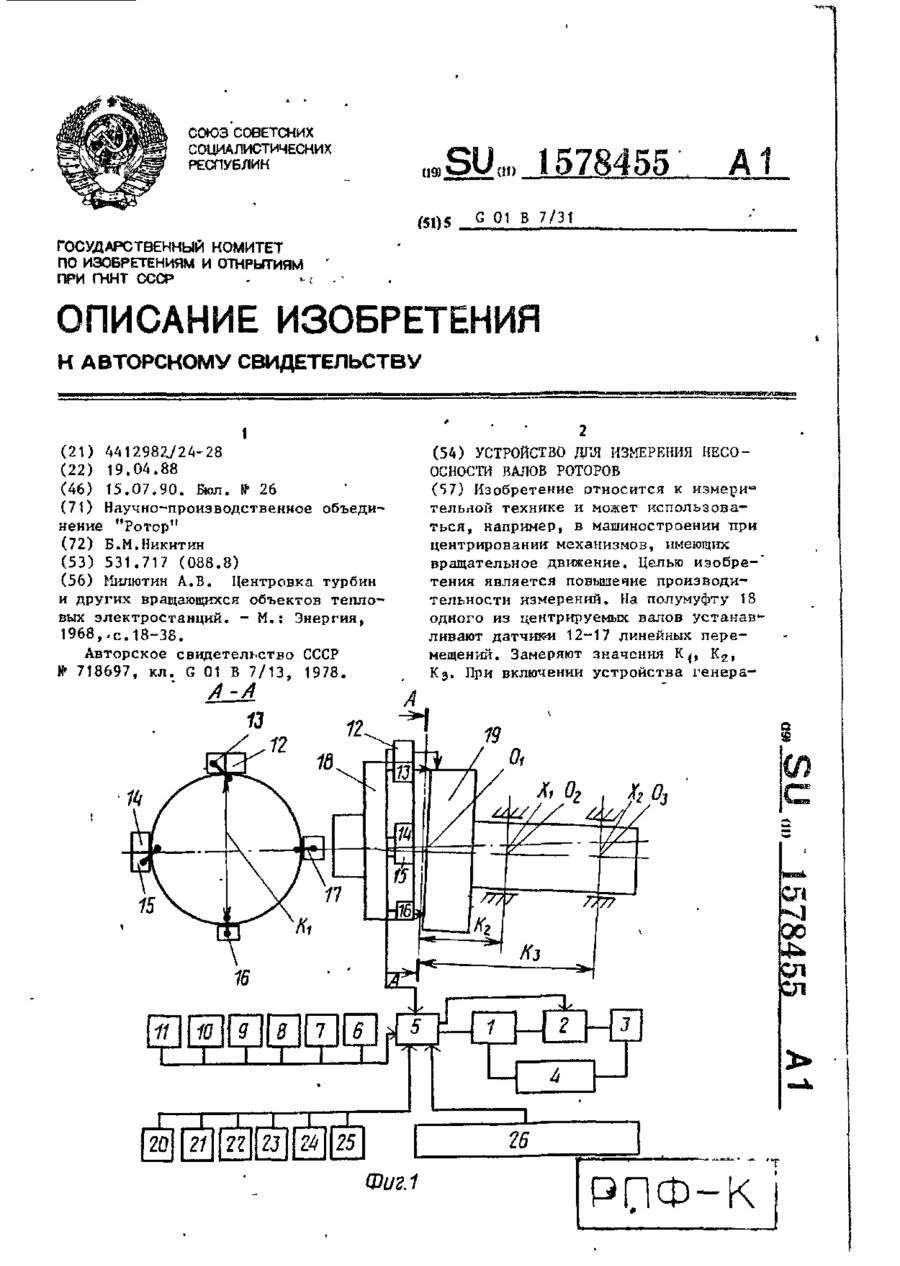
Номер патенту: 4144
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01N 27/00, G01B 7/31
Мітки: валів, неспіввісності, вимірювання, роторів, пристрій
Формула / Реферат:
1. Устройство для измерения и несоосности валов роторов, содержащее первую пару датчиков линейных перемещении, устанавливаемых на периферии первого из контролируемых валов, генератор, блок коммутации, подключенный соответствующими входами к датчикам линейных перемещении первой пары и генератору, фазочувст-вительный детектор, подключенный первым входом к выходу блока коммутации, вторым - к второму выходу генератора, и регистратор,...
Прилад для контролю макрогеометрії валів
Номер патенту: 59723
Опубліковано: 15.09.2003
Автори: Павленко Олександр Володимирович, Колот Лідія Петрівна
МПК: B23Q 15/007
Мітки: валів, контролю, прилад, макрогеометрії
Формула / Реферат:
Прилад для контролю макрогеометрії валів, що містить пневматичну скалку з центруючими поясками, сопла для підведення повітря та пристрій для реєстрації показників, який відрізняється тим, що містить три вимірювальні елементи, які не мають безпосереднього контакту з вимірюваною поверхнею, а встановлені відносно неї з регламентованим зазором.
Попередній патент: Спосіб хіміопроменевого лікування розповсюдженого дрібноклітинного раку легені
Наступний патент: Цвях для остеосинтезу стегнової кістки
Випадковий патент: Спосіб одержання дифторметану