Багатокоординатний вимірювач
Номер патенту: 3945
Опубліковано: 27.12.1994
Автори: Савенко Юрій Миколайович, Рудик Юрій Микитович, Чаус Леонід Михайлович, Клименко Олександр Миколайович, Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович
Формула / Реферат
1. Многокоординатный измеритель, содержащий установленный в корпусе карданов подвес с внутренней и наружной рамками, датчики углов, монтированные по осям рамок, и спицу, закрепленную на внутренней рамке, отличающийся тем, что он снабжен втулкой, одетой на спицу и монтируемой на подвижном объекте.
2. Многокоординатный измеритель по п. 1, отличающийся тем, что втулка установлена в трехстепенном шарнире.
3. Многокоординатный измеритель по п. 1 и п. 2, отличающийся тем, что спица выполнена телескопической и снабжена датчиком линейных перемещений, установленным на неподвижной части спицы, а подвижная часть жестко соединена с втулкой, установленной в шарнире.
Текст
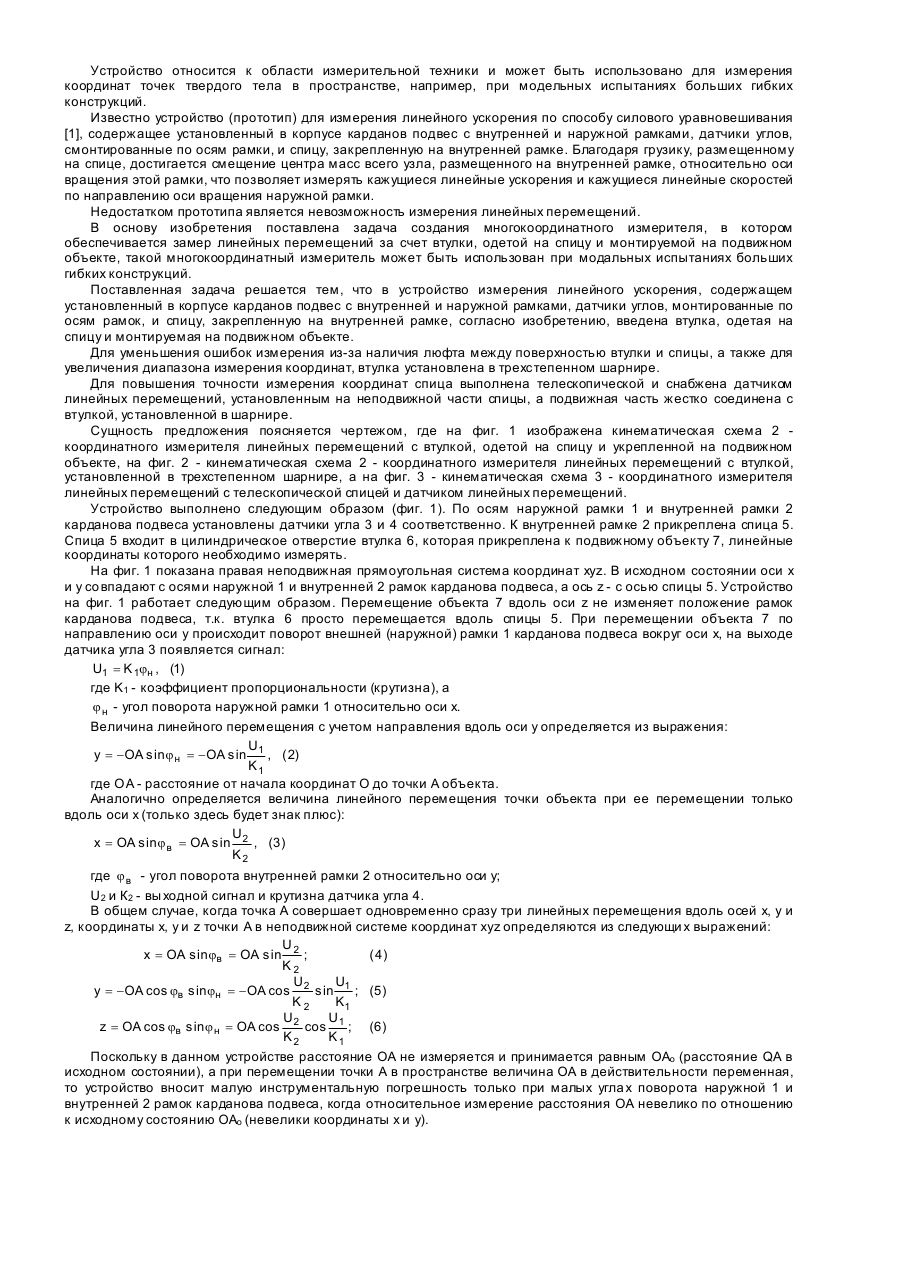
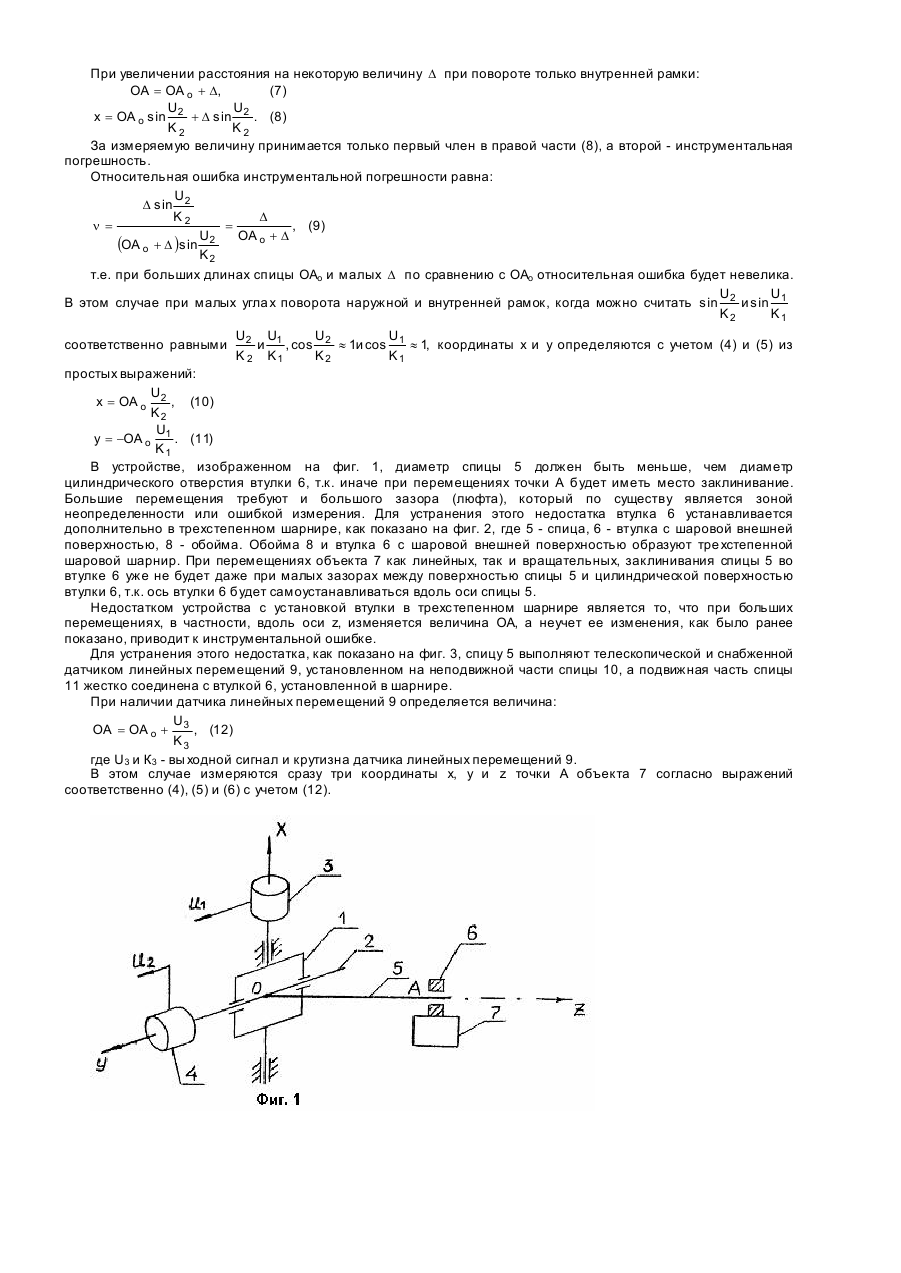
Устройство относится к области измерительной техники и может быть использовано для измерения координат точек твердого тела в пространстве, например, при модельных испытаниях больших гибких конструкций. Известно устройство (прототип) для измерения линейного ускорения по способу силового уравновешивания [1], содержащее установленный в корпусе карданов подвес с внутренней и наружной рамками, датчики углов, смонтированные по осям рамки, и спицу, закрепленную на внутренней рамке. Благодаря грузику, размещенному на спице, достигается смещение центра масс всего узла, размещенного на внутренней рамке, относительно оси вращения этой рамки, что позволяет измерять кажущиеся линейные ускорения и кажущиеся линейные скоростей по направлению оси вращения наружной рамки. Недостатком прототипа является невозможность измерения линейных перемещений. В основу изобретения поставлена задача создания многокоординатного измерителя, в котором обеспечивается замер линейных перемещений за счет втулки, одетой на спицу и монтируемой на подвижном объекте, такой многокоординатный измеритель может быть использован при модальных испытаниях больших гибких конструкций. Поставленная задача решается тем, что в устройство измерения линейного ускорения, содержащем установленный в корпусе карданов подвес с внутренней и наружной рамками, датчики углов, монтированные по осям рамок, и спицу, закрепленную на внутренней рамке, согласно изобретению, введена втулка, одетая на спицу и монтируемая на подвижном объекте. Для уменьшения ошибок измерения из-за наличия люфта между поверхностью втулки и спицы, а также для увеличения диапазона измерения координат, втулка установлена в трехстепенном шарнире. Для повышения точности измерения координат спица выполнена телескопической и снабжена датчиком линейных перемещений, установленным на неподвижной части спицы, а подвижная часть жестко соединена с втулкой, установленной в шарнире. Сущность предложения поясняется чертежом, где на фиг. 1 изображена кинематическая схема 2 координатного измерителя линейных перемещений с втулкой, одетой на спицу и укрепленной на подвижном объекте, на фиг. 2 - кинематическая схема 2 - координатного измерителя линейных перемещений с втулкой, установленной в трехстепенном шарнире, а на фиг. 3 - кинематическая схема 3 - координатного измерителя линейных перемещений с телескопической спицей и датчиком линейных перемещений. Устройство выполнено следующим образом (фиг. 1). По осям наружной рамки 1 и внутренней рамки 2 карданова подвеса установлены датчики угла 3 и 4 соответственно. К внутренней рамке 2 прикреплена спица 5. Спица 5 входит в цилиндрическое отверстие втулка 6, которая прикреплена к подвижному объекту 7, линейные координаты которого необходимо измерять. На фиг. 1 показана правая неподвижная прямоугольная система координат xyz. В исходном состоянии оси х и у со впадают с осями наружной 1 и внутренней 2 рамок карданова подвеса, а ось z - с осью спицы 5. Устройство на фиг. 1 работает следующим образом. Перемещение объекта 7 вдоль оси z не изменяет положение рамок карданова подвеса, т.к. втулка 6 просто перемещается вдоль спицы 5. При перемещении объекта 7 по направлению оси у происходит поворот внешней (наружной) рамки 1 карданова подвеса вокруг оси х, на выходе датчика угла 3 появляется сигнал: U1 = K 1jн , (1) где Κ1 - коэффициент пропорциональности (крутизна), а j н - угол поворота наружной рамки 1 относительно оси х. Величина линейного перемещения с учетом направления вдоль оси у определяется из выражения: U y = - OA sin j н = - OA sin 1 , ( 2) K1 где ОА - расстояние от начала координат О до точки А объекта. Аналогично определяется величина линейного перемещения точки объекта при ее перемещении только вдоль оси х (только здесь будет знак плюс): U x = OA sin j в = OA sin 2 , (3 ) K2 где j в - угол поворота внутренней рамки 2 относительно оси у; U2 и К2 - вы ходной сигнал и крутизна датчика угла 4. В общем случае, когда точка А совершает одновременно сразу три линейных перемещения вдоль осей х, у и z, координаты х, у и z точки А в неподвижной системе координат xyz определяются из следующи х выражений: U x = OA sin jв = OA sin 2 ; ( 4) K2 U U y = - OA cos jв sin jн = - OA cos 2 sin 1 ; (5) K2 K1 U2 U1 z = OA cos jв sin j н = OA cos соs ; (6 ) K2 K1 Поскольку в данном устройстве расстояние ОА не измеряется и принимается равным ОАо (расстояние QA в исходном состоянии), а при перемещении точки А в пространстве величина ОА в действительности переменная, то устройство вносит малую инструментальную погрешность только при малых угла х поворота наружной 1 и внутренней 2 рамок карданова подвеса, когда относительное измерение расстояния ОА невелико по отношению к исходному состоянию ОАо (невелики координаты х и у). При увеличении расстояния на некоторую величину D при повороте только внутренней рамки: OA = OA o + D, (7) U2 U2 x = OA o sin + D sin . (8) K2 K2 За измеряемую величину принимается только первый член в правой части (8), а второй - инструментальная погрешность. Относительная ошибка инструментальной погрешности равна: U D sin 2 K2 D n= = , (9) U2 OA o + D (OA o + D )sin K2 т.е. при больших длинах спицы ОАо и малых D по сравнению с ОАо относительная ошибка будет невелика. U U В этом случае при малых угла х поворота наружной и внутренней рамок, когда можно считать sin 2 и sin 1 K2 K1 соответственно равными U2 K2 и U1 K1 , cos U2 K2 » 1и cos U1 K1 » 1, координаты х и у определяются с учетом (4) и (5) из простых выражений: U x = OA o 2 , (10) K2 U y = -OA o 1 . (11) K1 В устройстве, изображенном на фиг. 1, диаметр спицы 5 должен быть меньше, чем диаметр цилиндрического отверстия втулки 6, т.к. иначе при перемещениях точки А будет иметь место заклинивание. Большие перемещения требуют и большого зазора (люфта), который по существу является зоной неопределенности или ошибкой измерения. Для устранения этого недостатка втулка 6 устанавливается дополнительно в трехстепенном шарнире, как показано на фиг. 2, где 5 - спица, 6 - втулка с шаровой внешней поверхностью, 8 - обойма. Обойма 8 и втулка 6 с шаровой внешней поверхностью образуют тре хстепенной шаровой шарнир. При перемещениях объекта 7 как линейных, так и вращательных, заклинивания спицы 5 во втулке 6 уже не будет даже при малых зазорах между поверхностью спицы 5 и цилиндрической поверхностью втулки 6, т.к. ось втулки 6 будет самоустанавливаться вдоль оси спицы 5. Недостатком устройства с установкой втулки в трехстепенном шарнире является то, что при больших перемещениях, в частности, вдоль оси z, изменяется величина ОА, а неучет ее изменения, как было ранее показано, приводит к инструментальной ошибке. Для устранения этого недостатка, как показано на фиг. 3, спицу 5 выполняют телескопической и снабженной датчиком линейных перемещений 9, установленном на неподвижной части спицы 10, а подвижная часть спицы 11 жестко соединена с втулкой 6, установленной в шарнире. При наличии датчика линейных перемещений 9 определяется величина: U OA = OA o + 3 , (12 ) K3 где U3 и К3 - вы ходной сигнал и крутизна датчика линейных перемещений 9. В этом случае измеряются сразу три координаты х, у и z точки А объекта 7 согласно выражений соответственно (4), (5) и (6) с учетом (12).
ДивитисяДодаткова інформація
Назва патенту англійськоюMulti-coordinate measuring device
Автори англійськоюAnuprienko Hennadii Yefremovych, Savenko Yurii Mykolaiovych, Rudyk Yurii Mykytovych, Karpachov Yurii Andriiovych, Klymenko Oleksandr Mykolaiovych, Chaus Leonid Mykhailovych
Назва патенту російськоюМного координатный измеритель
Автори російськоюАнуприенко Геннадий Ефремович, Савенко Юрий Николаевич, Рудик Юрий Никитович, Карпачев Юрий Андреевич, Клименко Александр Николаевич, Чаус Леонид Михайлович
МПК / Мітки
МПК: G01C 23/00
Мітки: вимірювач, багатокоординатний
Код посилання
<a href="https://ua.patents.su/3-3945-bagatokoordinatnijj-vimiryuvach.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний вимірювач</a>
Спиценатягувач
Номер патенту: 4151
Опубліковано: 27.12.1994
Автори: Жеребний Михайло Олександрович, Жеребний Сергій Михайлович
МПК: A61B 17/66
Мітки: спиценатягувач
Формула / Реферат:
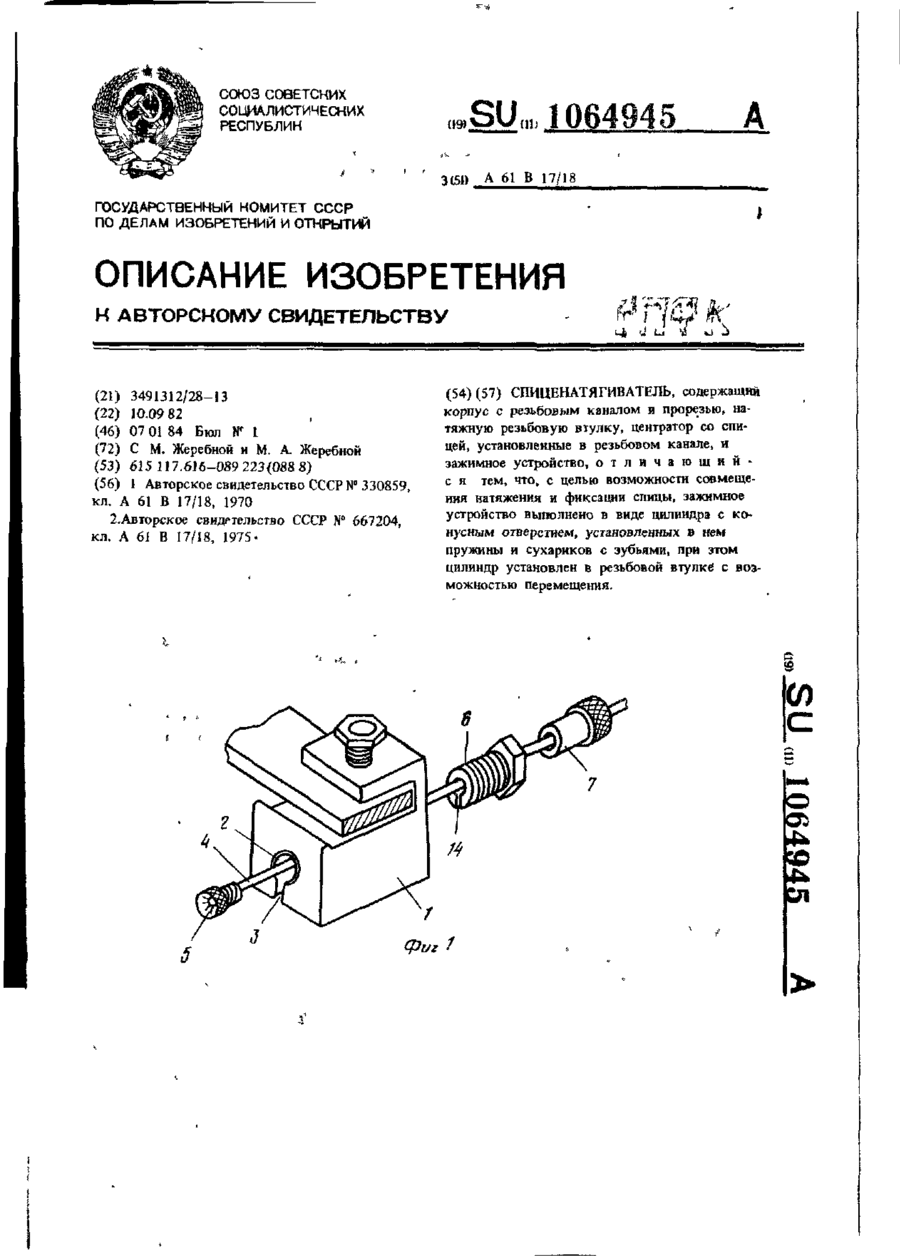
Спиценатягиватель, содержащий корпус с резьбовым каналом и прорезью, натяжную резьбовую втулку, центратор со спицей, установленные в резьбовом канале, и зажимное устройство, отличающийся тем, что, с целью возможности совмещения натяжения и фиксации спицы, зажимное устройство выполнено в виде цилиндра с конусным отверстием, установленных в нем пружины и сухариков с зубьями, при этом цилиндр установлен в резьбовой втулке свозможностью...
Базалійський вимірювач кутового прискорення вала
Номер патенту: 23
Опубліковано: 30.04.1993
Автори: Музичук Антон Максимович, Музичук Федір Максимович
МПК: G01P 15/00, G01P 15/18
Мітки: базалійський, вала, прискорення, кутового, вимірювач
Формула / Реферат:
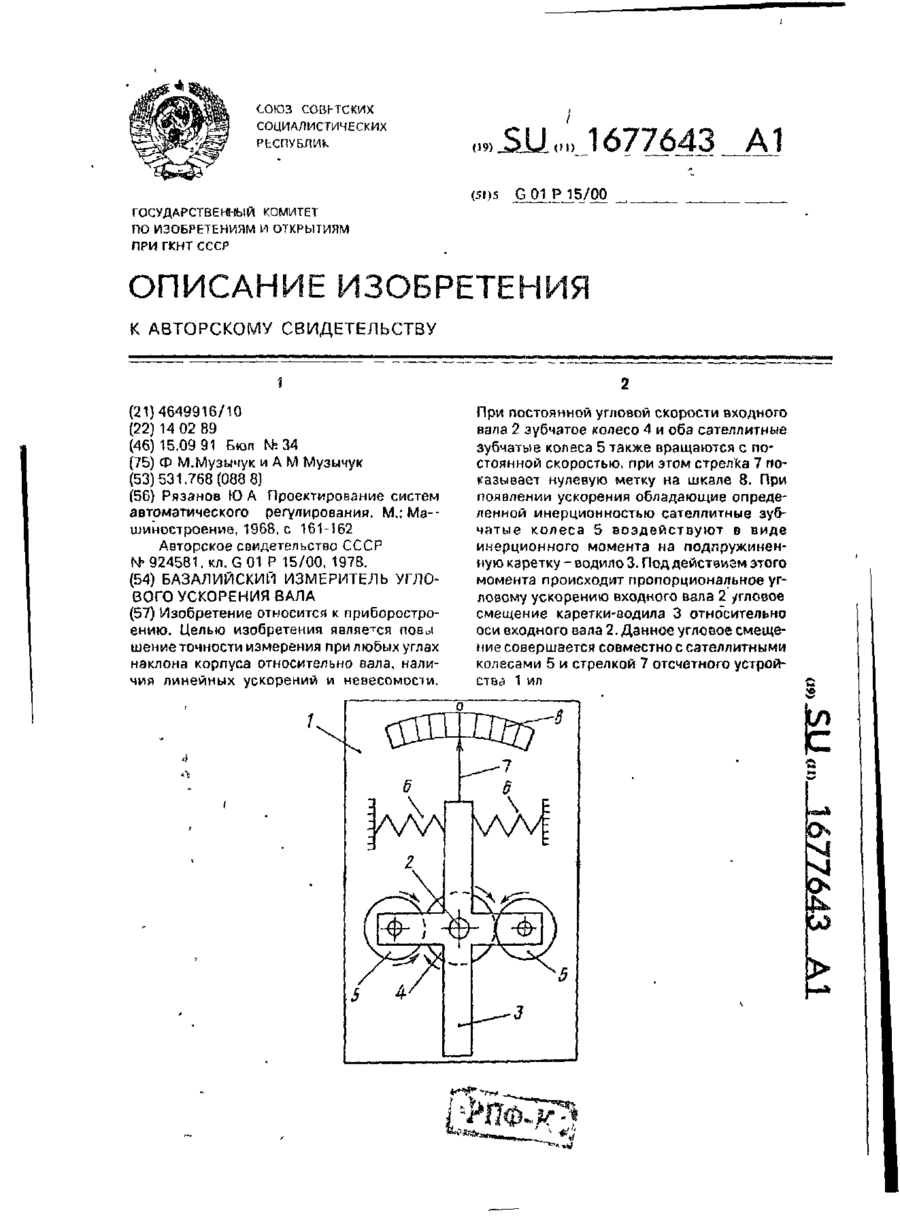
Формула изобретенияБазалийский измеритель углового ускорения вала, содержащий корпус, каретку-водило с зубчатым колесом-сателлитом, связанным с зубчатым колесом, закрепленным на валу, стрелку, связанную с кареткой, и шкалу, закрепленную на корпусе, отличающийся тем, что, с целью повышения точности измерения при любых углах наклона корпуса относительно вала, наличия линейных ускорений и невесомости, каретка снабжена вторым зубчатым...
Безконтактний вимірювач струму в трубопроводі
Номер патенту: 250
Опубліковано: 30.04.1993
Автори: Вербенець Богдан Ярославович, Джала Роман Михайлович
МПК: G01R 33/02, G01R 19/00
Мітки: трубопроводі, безконтактний, струму, вимірювач
Формула / Реферат:
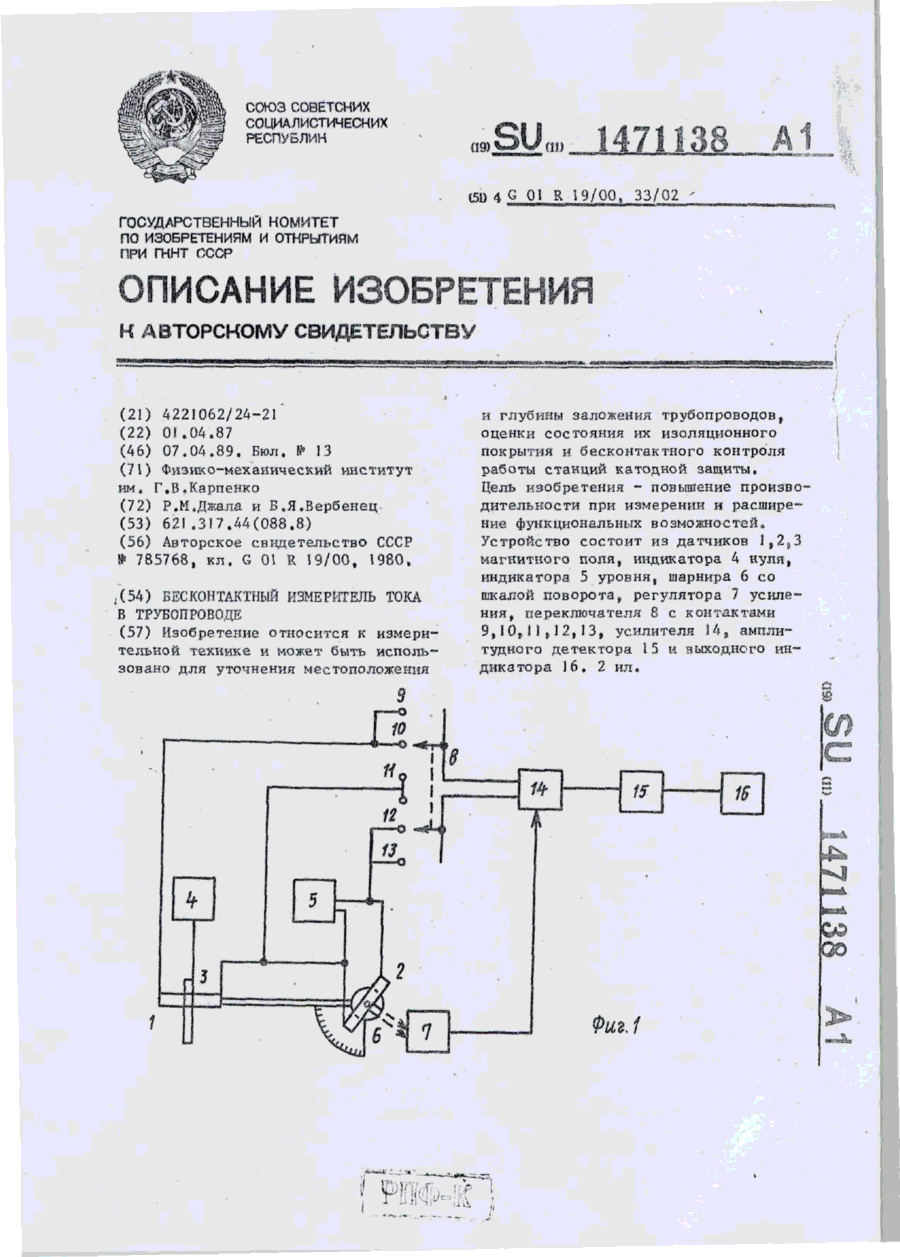
Ф о р м у л а и з о б р е т е н и яБесконтактный измеритель тока в трубопроводе, содержащий первый и второй однокомпонентные датчики магнитного поля„ расположенные в плоскости, перпендикулярной трубопроводу, последовательно включенные усилитель, амплитудный детектор и выходкой индикатор, причем обмотки датчика соединены последовательно, о т л и ч а ю щ и й с я тем, что, с целью повышения производительности за счет улучшения...
Багатоканальний вимірювач вібрації
Номер патенту: 364
Опубліковано: 30.04.1993
Автори: Квашин Михайло Федорович, Іванов Сергій Григорович, Красюк Володимир Якович, Мирошниченко Микола Васильович, Барков Олександр Степанович, Серга Валерій Борисович
МПК: G01H 11/00
Мітки: вимірювач, вібрації, багатоканальний
Формула / Реферат:
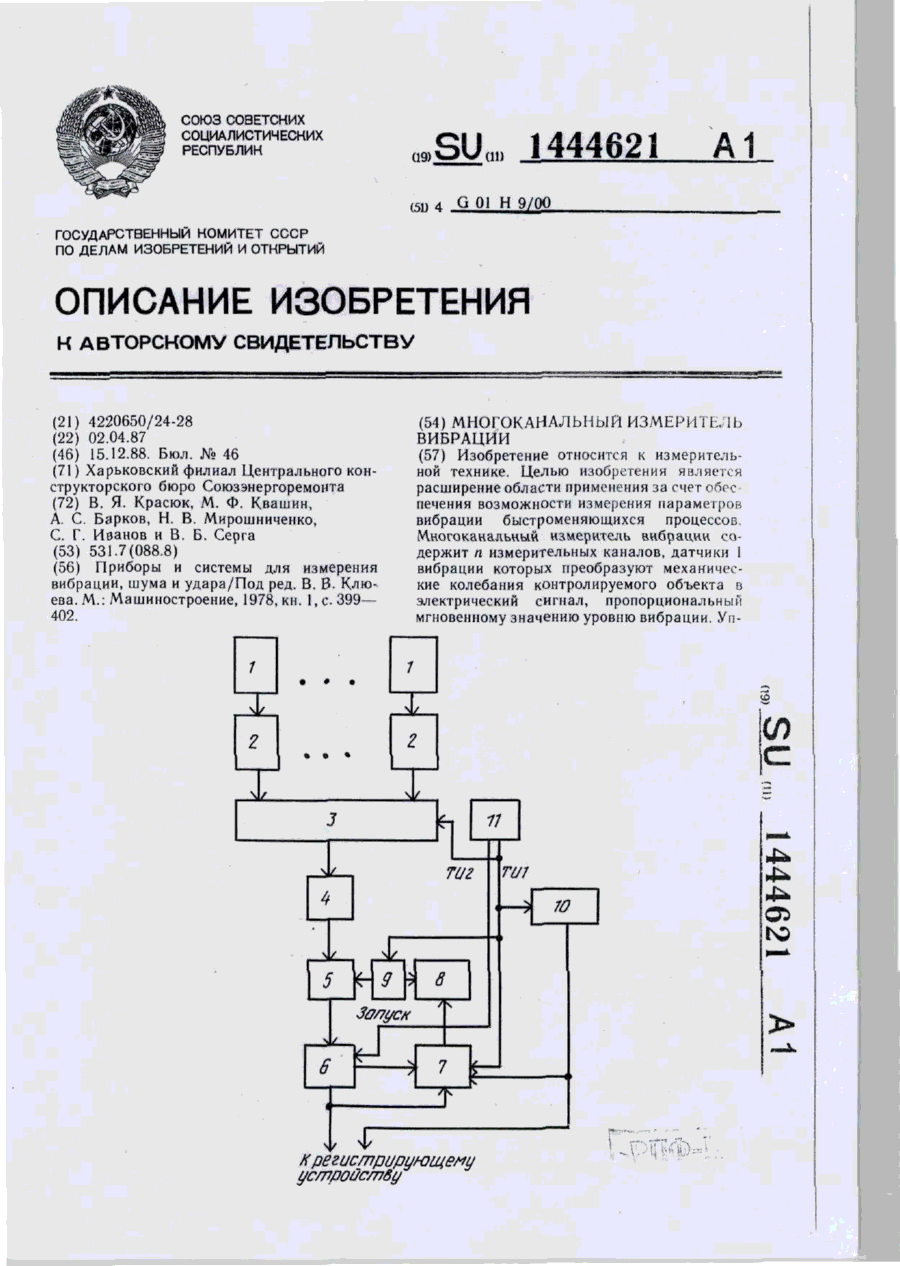
Формула изобретенияМногоканальный измеритель вибрации, содержащий n измерительных каналов, каждый из которых содержит последовательно соединенные вибродатчик и предварительный усилитель, коммутатор с информационными и одним управляющим входами, последовательно соединенные детектор сигнала вибрации и фильтр нижних частот, блок управления, выход которого связан с управляющим входом коммутатора, каждый из n информационных входов которого...
Вимірювач розладнання нвч-резонатору
Номер патенту: 3058
Опубліковано: 26.12.1994
Автори: Скрипник Юрій Олексійович, Мордоус Віталій Миколайович, Потапов Анатолій Олександрович
МПК: G01R 27/00, H01Q 3/22
Мітки: вимірювач, розладнання, нвч-резонатору
Формула / Реферат:
Измеритель расстройки СВЧ резонатора, содержащий СВЧ генератор, управляемый СВЧ переключатель, первый и второй входы которого соединены с соответствующими выходами двойного волноводного тройника, третий выход которого является выходом для подсоединения входа однорезонаторного датчика, и последовательно соединенные балансный смеситель, полосовой фильтр и амплитудный детектор, а также последовательно соединенные избирательный усилитель,...
Попередній патент: Спосіб одержання модифікованого неорганічного дисперсного матеріалу
Наступний патент: Пристрій для обмеження ферорезонансних та резонансних процесів
Випадковий патент: Експрес-метод визначення масової концентрації залишкового екстракту у яблучних виноматеріалах і винах