Силовий стіл
Номер патенту: 3998
Опубліковано: 15.12.2004
Автори: Крижанівський Володимир Андрійович, Єрьоміна Ірина Миколаївна, Пестунов Володимир Михайлович, Гречка Андрій Іванович

Формула / Реферат
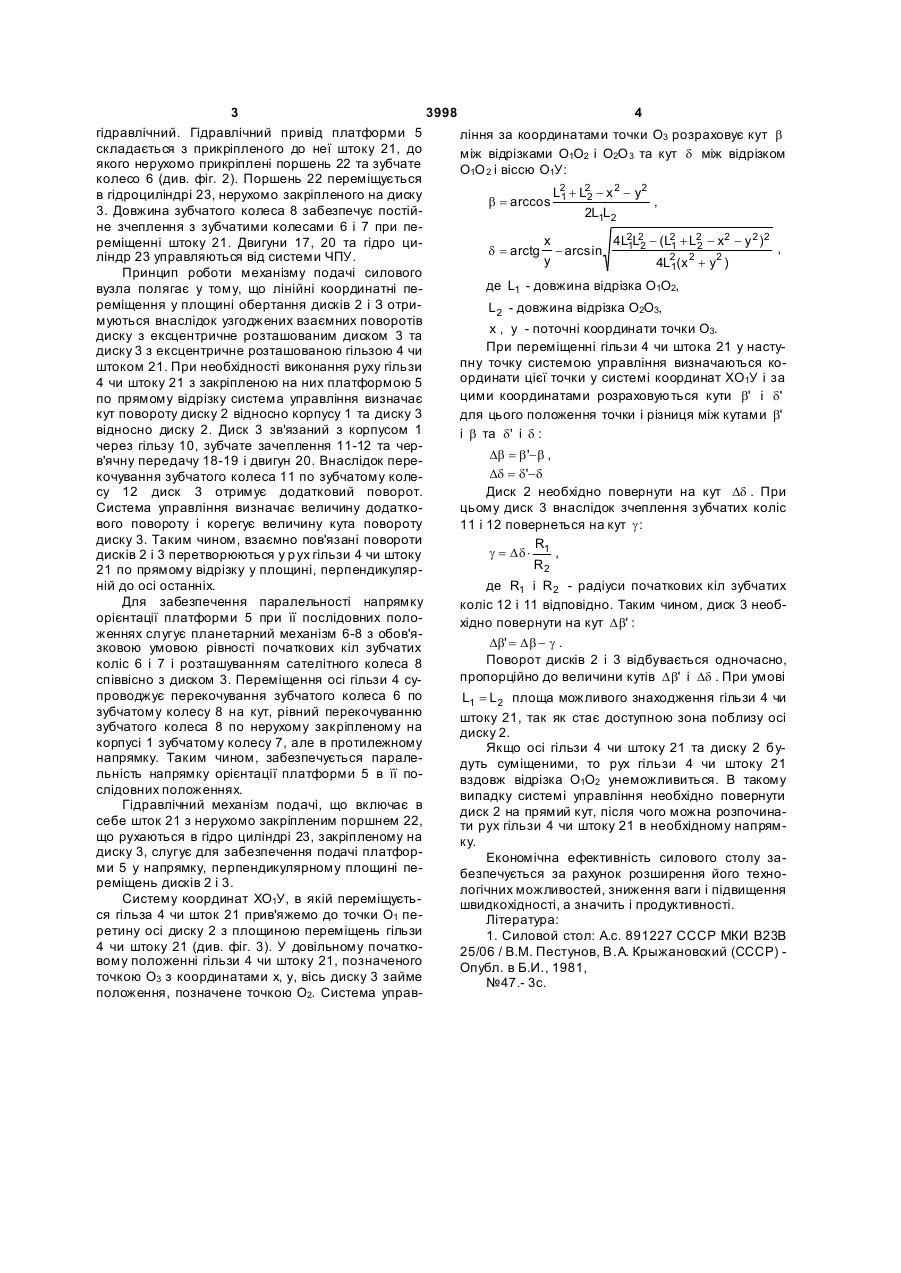
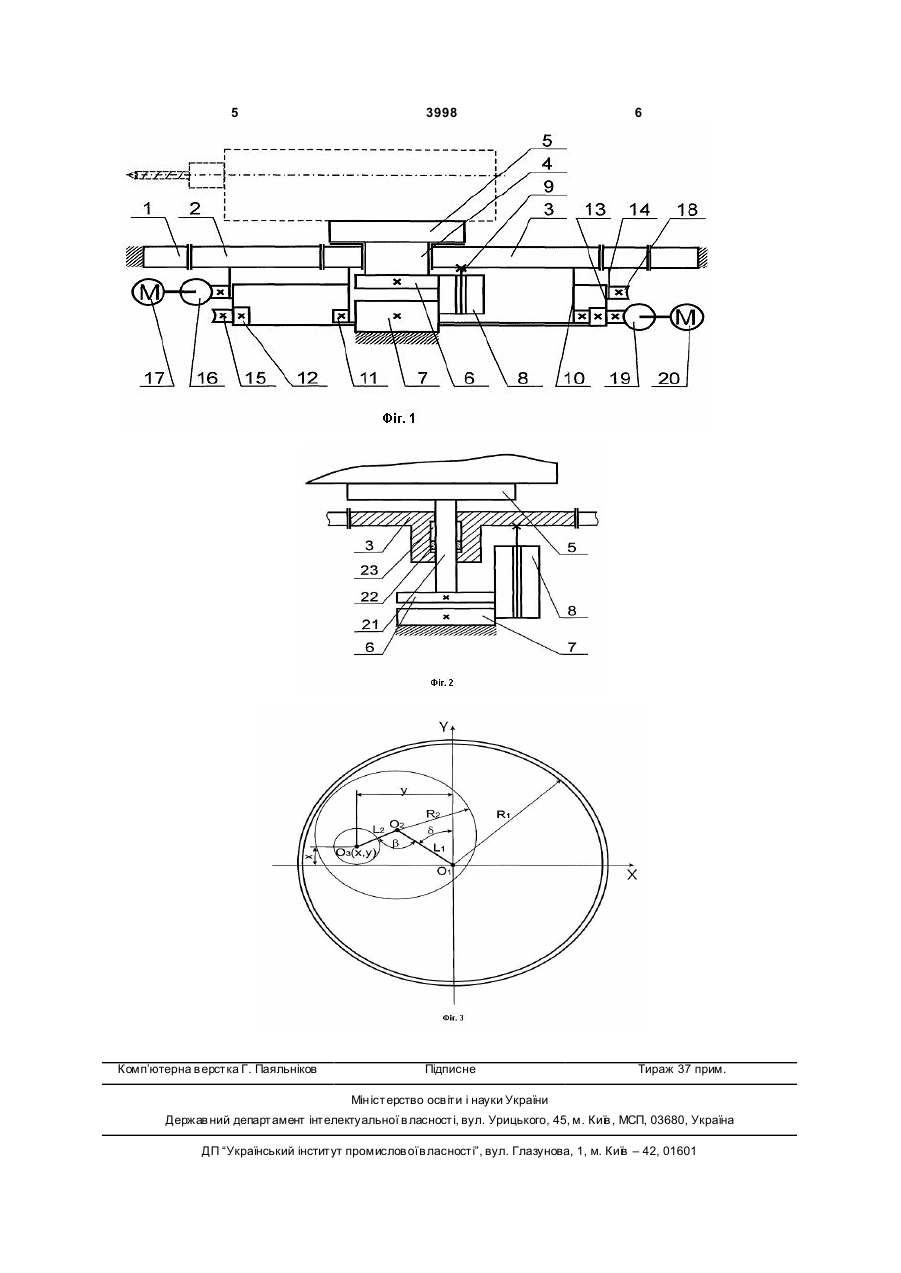
1. Силовий стіл, що містить корпус і платформу з механізмом її подачі по двох координатах, який відрізняється тим, що платформа кріпиться до гільзи, ексцентрично розташованій в напрямних на диску, зв'язаному через зубчату і черв'ячну передачі з приводом обертання, і, в свою чергу, ексцентрично розташованому на напрямних в іншому диску, що обертається на напрямних корпуса і з'єднаний через черв'ячну передачу з приводом обертання, а сама гільза має зубчате колесо, що через сателіт зв'язане з іншим зубчатим колесом, нерухомо закріпленим на корпусі співвісно з диском, що обертається на напрямних корпуса.
2. Силовий стіл за п. 1, який відрізняється тим, що платформа має додатковий привід подачі в напрямку, перпендикулярному до площини переміщення дисків, виконаний у вигляді поршня, що переміщується в гідроциліндрі.
Текст
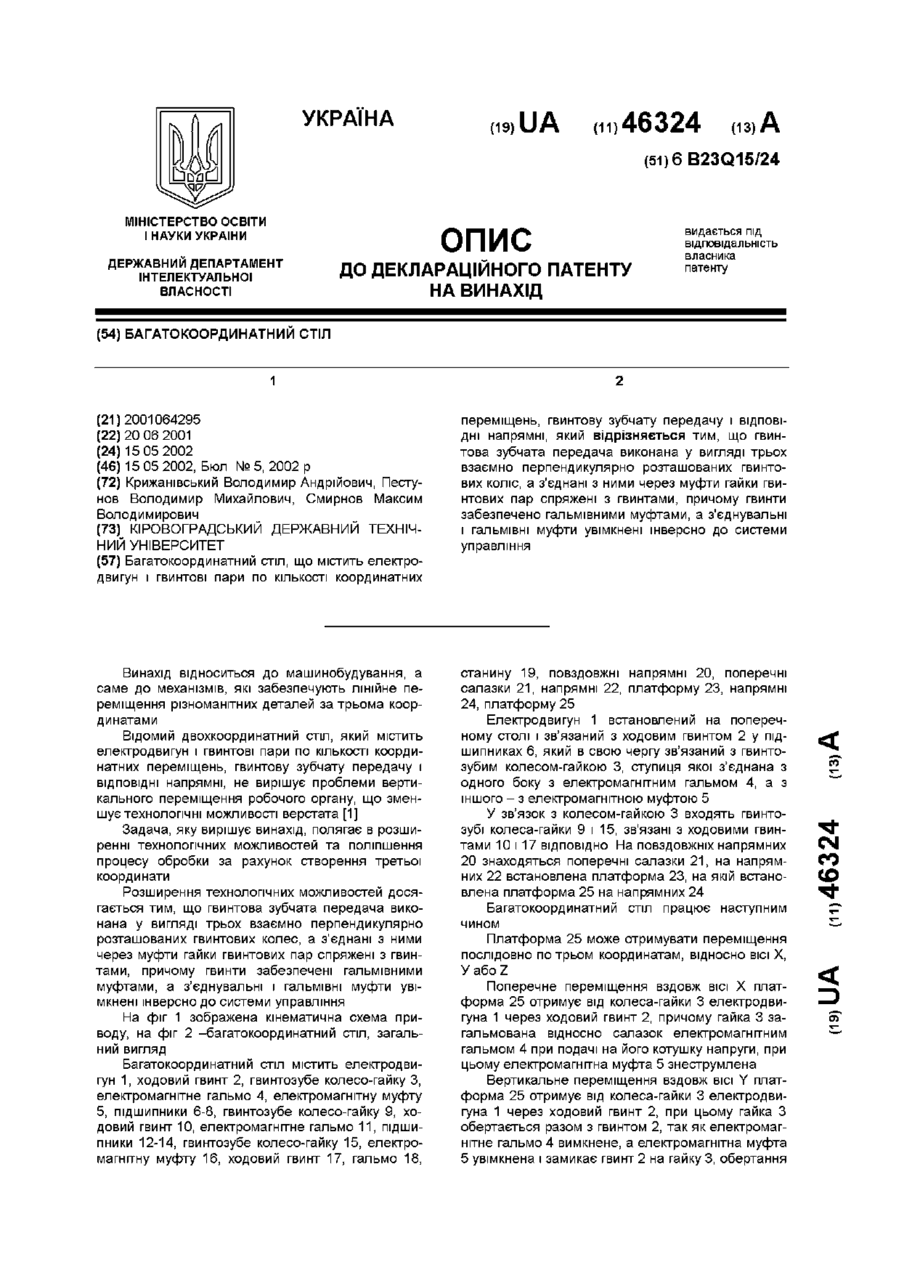
1. Силовий стіл, що містить корпус і платформу з механізмом її подачі по двох координатах, який відрізняється тим, що платформа кріпиться до гільзи, ексцентрично розташованій в напрямних на диску, зв'язаному через зубчату і черв'ячн у пе 3 3998 4 гідравлічний. Гідравлічний привід платформи 5 ління за координатами точки О3 розраховує кут b складається з прикріпленого до неї штоку 21, до між відрізками О1О2 і О2О 3 та кут d між відрізком якого нерухомо прикріплені поршень 22 та зубчате О1О 2 і віссю О1У: колесо 6 (див. фіг. 2). Поршень 22 переміщується L2 + L2 - x 2 - y2 в гідроциліндрі 23, нерухомо закріпленого на диску b = arccos 1 2 , 3. Довжина зубчатого колеса 8 забезпечує постій2L1L2 не зчеплення з зубчатими колесами 6 і 7 при пеx 4 L2L2 - (L2 + L2 - x2 - y 2 )2 реміщенні штоку 21. Двигуни 17, 20 та гідро ци1 2 1 2 , d = arctg - arcsin 2 2 2 ліндр 23 управляються від системи ЧПУ. y 4L 1(x + y ) Принцип роботи механізму подачі силового де L1 - довжина відрізка О1О2, вузла полягає у тому, що лінійні координатні переміщення у площині обертання дисків 2 і З отриL2 - довжина відрізка О2О3, муються внаслідок узгоджених взаємних поворотів x , y - поточні координати точки О3. диску з ексцентричне розташованим диском 3 та При переміщенні гільзи 4 чи штока 21 у настудиску 3 з ексцентричне розташованою гільзою 4 чи пну точку системою управління визначаються коштоком 21. При необхідності виконання руху гільзи ординати цієї точки у системі координат ХО1У і за 4 чи штоку 21 з закріпленою на них платформою 5 цими координатами розраховуються кути b' і d' по прямому відрізку система управління визначає кут повороту диску 2 відносно корпусу 1 та диску 3 для цього положення точки і різниця між кутами b' відносно диску 2. Диск 3 зв'язаний з корпусом 1 і b та d' і d : через гільзу 10, зубчате зачеплення 11-12 та черDb = b '- b , в'ячну передачу 18-19 і двигун 20. Внаслідок переDd = d'- d кочування зубчатого колеса 11 по зубчатому колесу 12 диск 3 отримує додатковий поворот. Диск 2 необхідно повернути на кут Dd . При Система управління визначає величину додаткоцьому диск 3 внаслідок зчеплення зубчатих коліс вого повороту і корегує величину кута повороту 11 і 12 повернеться на кут g : диску 3. Таким чином, взаємно пов'язані повороти R g = Dd × 1 , дисків 2 і 3 перетворюються у р ух гільзи 4 чи штоку R2 21 по прямому відрізку у площині, перпендикулярній до осі останніх. Для забезпечення паралельності напрямку орієнтації платформи 5 при її послідовних положеннях слугує планетарний механізм 6-8 з обов'язковою умовою рівності початкових кіл зубчатих коліс 6 і 7 і розташуванням сателітного колеса 8 співвісно з диском 3. Переміщення осі гільзи 4 супроводжує перекочування зубчатого колеса 6 по зубчатому колесу 8 на кут, рівний перекочуванню зубчатого колеса 8 по нерухому закріпленому на корпусі 1 зубчатому колесу 7, але в протилежному напрямку. Таким чином, забезпечується паралельність напрямку орієнтації платформи 5 в її послідовних положеннях. Гідравлічний механізм подачі, що включає в себе шток 21 з нерухомо закріпленим поршнем 22, що рухаються в гідро циліндрі 23, закріпленому на диску 3, слугує для забезпечення подачі платформи 5 у напрямку, перпендикулярному площині переміщень дисків 2 і 3. Систему координат ХО1У, в якій переміщується гільза 4 чи шток 21 прив'яжемо до точки О1 перетину осі диску 2 з площиною переміщень гільзи 4 чи штоку 21 (див. фіг. 3). У довільному початковому положенні гільзи 4 чи штоку 21, позначеного точкою О3 з координатами х, у, вісь диску 3 займе положення, позначене точкою О2. Система управ де R1 і R2 - радіуси початкових кіл зубчатих коліс 12 і 11 відповідно. Таким чином, диск 3 необхідно повернути на кут D b' : Db' = D b - g . Поворот дисків 2 і 3 відбувається одночасно, пропорційно до величини кутів D b' і Dd . При умові L1 = L2 площа можливого знаходження гільзи 4 чи штоку 21, так як стає доступною зона поблизу осі диску 2. Якщо осі гільзи 4 чи штоку 21 та диску 2 будуть суміщеними, то рух гільзи 4 чи штоку 21 вздовж відрізка O1O2 унеможливиться. В такому випадку системі управління необхідно повернути диск 2 на прямий кут, після чого можна розпочинати рух гільзи 4 чи штоку 21 в необхідному напрямку. Економічна ефективність силового столу забезпечується за рахунок розширення його технологічних можливостей, зниження ваги і підвищення швидкохідності, а значить і продуктивності. Література: 1. Силовой стол: А.с. 891227 СССР МКИ В23В 25/06 / В.М. Пестунов, В.А. Крыжановский (СССР) Опубл. в Б.И., 1981, №47.- 3с. 5 Комп’ютерна в ерстка Г. Паяльніков 3998 6 Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Автори англійськоюKryzhanivskyi Volodymyr Andriiovych, Pestunov Volodymyr Mykhailovych, Hrechka Andrii Ivanovych
Автори російськоюКрижанивский Владимир Андреевич, Пестунов Владимир Михайлович, Гречка Андрей Иванович
МПК / Мітки
МПК: B23Q 37/00
Код посилання
<a href="https://ua.patents.su/3-3998-silovijj-stil.html" target="_blank" rel="follow" title="База патентів України">Силовий стіл</a>
Багатокоординатний стіл
Номер патенту: 46324
Опубліковано: 15.05.2002
Автори: Пестунов Володимир Михайлович, Смирнов Максим Володимирович, Крижанівський Володимир Андрійович
МПК: B23Q 15/20
Мітки: багатокоординатний, стіл
Формула / Реферат:
Багатокоординатний стіл, що містить електродвигун i гвинтові пари по кількості координатних переміщень, гвинтову зубчату передачу i відповідні напрямні, який відрізняється тим, що гвинтова зубчата передача виконана у вигляді трьох взаємно перпендикулярно розташованих гвинтових коліс, а з'єднані з ними через муфти гайки гвинтових пар спряжені з гвинтами, причому гвинти забезпечено гальмівними муфтами, а з'єднувальні i гальмівні муфти увімкнені...
Стіл
Номер патенту: 54936
Опубліковано: 17.03.2003
Автори: Крижанівський Володимир Андрійович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: стіл
Формула / Реферат:
Стіл, який складається з основи, виконаної у вигляді призми, рухомої платформи, шести штанг постійної довжини, кінці яких шарнірно зв'язані з рухомою платформою та основою, який відрізняється тим, що шарніри, які зв'язують штанги з основою, виконані з можливістю переміщення вздовж напрямних, розташованих на гранях основи.
Круглий концентраційний стіл
Номер патенту: 49298
Опубліковано: 16.09.2002
Автори: Носовський Олег Ігоревич, Савицька Наталія Вікторівна, Марутов Володимир Олександрович, Михайленко Михайло Володимирович
МПК: B03B 5/74
Мітки: стіл, концентраційний
Формула / Реферат:
1. Круглий концентраційний стіл, який містить раму, деку з конічною робочою поверхнею, порожнистий вал, опору, привід, трубопровід для подачі води на робочу поверхню деки, бризкала, живильник для подачі пульпи, який відрізняється тим, що робоча поверхня деки виконана з гнучкого еластичного матеріалу і з'єднана з накладками на периферійній частині деки і штовхачем в осьовій частині, при цьому штовхач розташований в порожнині вала, взаємодіє з...
Поворотний стіл зі змінним ексцентриситетом
Номер патенту: 46348
Опубліковано: 16.08.2004
Автори: Підгаєцький Михайло Матвійович, Скібінський Олександр Іванович, Мажара Віталій Анатолійович
МПК: B23F 5/00
Мітки: ексцентриситетом, поворотний, стіл, змінним
Формула / Реферат:
1. Поворотний стіл для обробки виробів типу зубчатих коліс, що складається з корпусу, в якому розташовано шпиндель виробу з приводом від електродвигуна, який відрізняється тим, що в ньому розміщено зовнішній шпиндель з приводом від первинного електродвигуна через черв'ячну передачу, в якому розташовано каретку з можливістю радіального переміщення по напрямних, в центральному отворі останньої розташовано внутрішній шпиндель, кінематично...
Силовий гідроциліндр
Номер патенту: 60337
Опубліковано: 15.10.2003
Автори: Токарєв Олексій Захарович, Хорунжий Володимир Дмитрович, Шевченко Микола Іванович
МПК: F15B 15/22
Мітки: силовий, гідроциліндр
Формула / Реферат:
1. Силовий гідроциліндр, що складається з корпусу, штока і поршня з дросельним отвором та клапаном, який відрізняється тим, що в поршні виконано радіальний канал, який перетинає дросельний отвір, в якому встановлений з можливістю зворотно-поступального руху клапан, причому шток виконано з поздовжнім каналом, який має сполучення з радіальним каналом поршня.2. Силовий гідроциліндр по п. 1, який відрізняється тим, що клапан виконано у...
Попередній патент: Установка для редукування тиску потоку
Наступний патент: Підшипниковий підвіс для подвійного керновідбірного снаряда
Випадковий патент: Ярусний плуг