Геодезичний gnss прилад
Номер патенту: 40233
Опубліковано: 25.03.2009
Автори: Кондратюк Василь Михайлович, Вишнякова Євгенія Вікторівна, Харченко Володимир Петрович, Васильєв Ігор Васильович, Трикоз Валерій Павлович, Куценко Олександр Вікторович, Газнюк Максим Олександрович

Формула / Реферат
Геодезичний GNSS прилад, який включає в себе векторний цикл для відстеження бажаних далекомірних сигналів у відповідності з оціненим часом прибуття прямих і відбитих бажаних сигналів, а також взаємокореляційну обробку як засіб для оцінки часу прибуття прямих і відбитих сигналів та для підтримки оціненого часу прибуття прямих і відбитих сигналів в векторному циклі відстеження, який відрізняється тим, що в нього введені постійний запам'ятовуючий пристрій та логіка керування постійним запам'ятовуючим пристроєм.
Текст
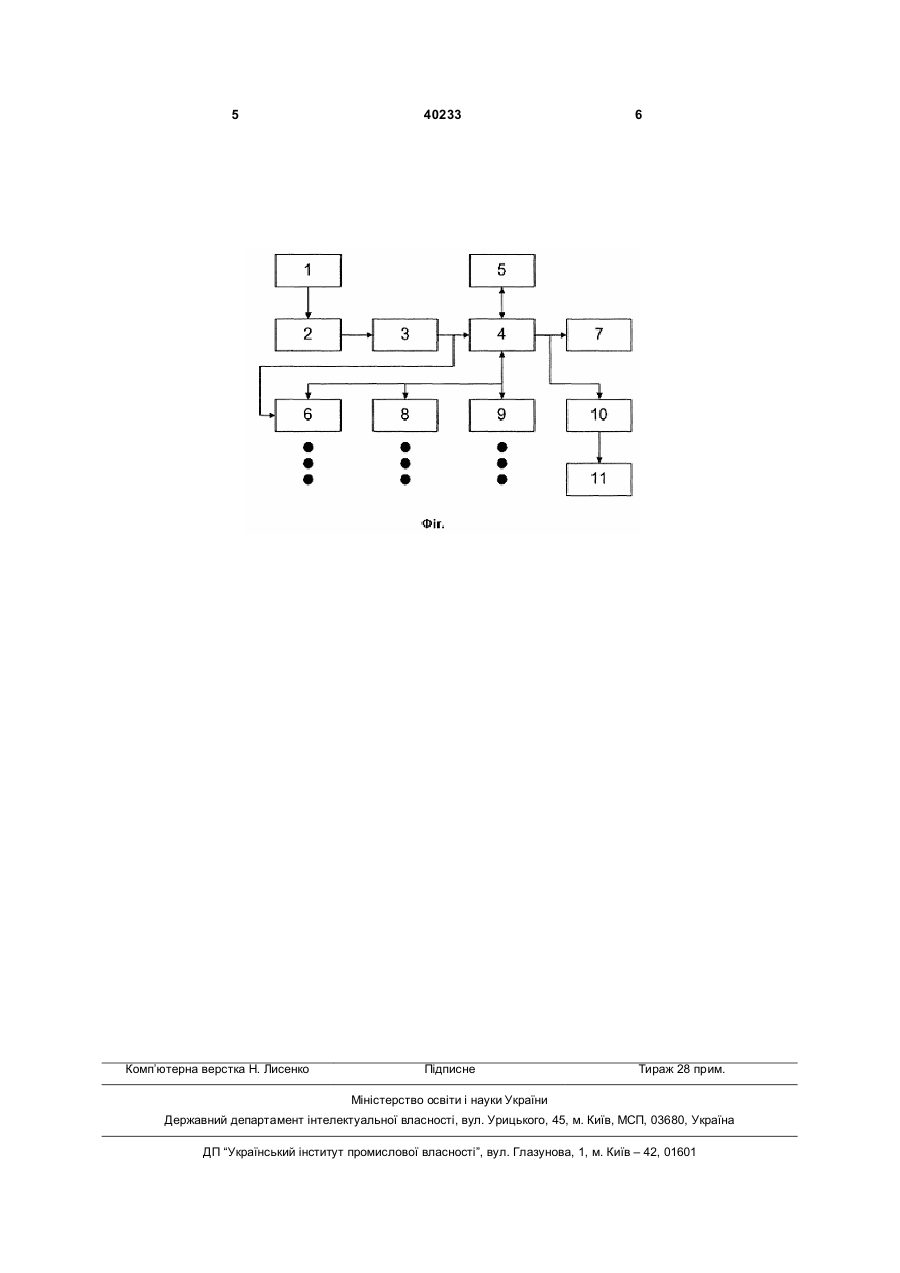
Геодезичний GNSS прилад, який включає в себе векторний цикл для відстеження бажаних далекомірних сигналів у відповідності з оціненим часом прибуття прямих і відбитих бажаних сигналів, а також взаємокореляційну обробку як засіб для оцінки часу прибуття прямих і відбитих сигналів та для підтримки оціненого часу прибуття прямих і відбитих сигналів в векторному циклі відстеження, який відрізняється тим, що в нього введені постійний запам'ятовуючий пристрій та логіка керування постійним запам'ятовуючим пристроєм. (19) (21) u200813447 (22) 21.11.2008 (24) 25.03.2009 (46) 25.03.2009, Бюл.№ 6, 2009 р. (72) ХАРЧЕНКО ВОЛОДИМИР ПЕТРОВИЧ, UA, КОНДРАТЮК ВАСИЛЬ МИХАЙЛОВИЧ, UA, ГАЗНЮК МАКСИМ ОЛЕКСАНДРОВИЧ, UA, ВИШНЯКОВА ЄВГЕНІЯ ВІКТОРІВНА, UA, ТРИКОЗ ВАЛЕРІЙ ПАВЛОВИЧ, UA, КУЦЕНКО ОЛЕКСАНДР ВІКТОРОВИЧ, UA, ВАСИЛЬЄВ ІГОР ВАСИЛЬОВИЧ, UA (73) НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ, UA 3 бажаних далекомірних сигналів у відповідності з оціненим часом прибуття прямих і відбитих бажаних сигналів, а також взаємокореляційну обробку, як засіб для оцінки часу прибуття прямих і відбитих сигналів та для підтримки оціненого часу прибуття прямих і відбитих сигналів в векторному циклі відстеження, згідно з корисною моделлю доповнюється постійним запам'ятовуючим пристроєм та логікою управління постійним запам'ятовуючим пристроєм. Введення в навігаційний приймач постійного запам'ятовуючого пристрою та логіки управління постійним запам'ятовуючим пристроєм вигідно відрізняє запропонований геодезичний GNSS прилад від прототипу, оскільки забезпечує можливість збереження навігаційних вимірювань та даних від далекомірних джерел. В результаті відпадає необхідність користуватися зовнішніми запам'ятовуючими пристроями і як наслідок спрощується експлуатація навігаційного приймача при проведенні геодезичної зйомки місцевості. На кресленні зображена блок-схема геодезичного GNSS приладу. Геодезичний GNSS прилад містить GNSS антену 1, перетворювач проміжної частоти 2, аналогово-цифровий перетворювач 3, логіку управління приймачем 4, пам'ять 5, модуль згортки та оцінки затримки 6, процесор взаємокореляції 7, цикл захоплення фази 8, демодулятор 9, логіку управління постійним запам'ятовуючим пристроєм 10, та постійний запам'ятовуючий пристрій 11. Геодезичний GNSS прилад працює наступним чином. Сигнали від далекомірних джерел GNSS, модульовані навігаційними даними, приймаються GNSS антеною 1, передаються на перетворювач проміжної частоти 2, і оцифровуються аналоговоцифровим перетворювачем 3. Оцифровані виміри передаються до логіки управління приймачем 4, де вибрані епохи згаданих вище вимірів можуть бути збережені в пам'яті 5, а також передані до модуля згортки та оцінки затримки 6. Процесор взаємокореляції 7 опрацьовує вибрану епоху оцифрованих вимірів збережених в пам'яті 5, під керуванням логіки управління приймачем 4, і визначає один чи кілька максимумів функції кореляції пов'язаних з кожним з далекомірних сигналів, що присутні на вході приймача. Зазвичай визначаються декілька максимумів функції кореляції. Та тільки перший визначений максимум функції кореляції, має використовуватися при вирішенні навігаційної задачі, також варто зазначити що перший максимум функції кореляції може не бути самим сильним з кількох визначених максимумів функції. Для певних категорій користувачів величини відносного часу прибуття і потужності сигналу різних максимумів функції кореляції будуть повільно змінюватися в часі. Час прибуття і потужність різних 40233 4 максимумів функції кореляції передаються до логіки управління приймачем 4. Оцифровані виміри, що генеруються аналогово-цифровим перетворювачем З, також передаються до групи каналів кожен з яких включає для кожного з сигналів, що відстежуються, модуль згортки та оцінки затримки 6, цикл захоплення фази 8 та демодулятор 9. В приймачі, модуль згортки та оцінки затримки 6 керується логікою управління приймачем 4 для кореляції з відомим далекомірним кодом. Модуль згортки та оцінки затримки відстежує цей код як скалярний цикл відстеження, та генерує локальну різницю вибраного далекомірного коду, і потім формує три копії цієї локальної різниці з фіксованими часовими затримками між цими трьома копіями, що називаються ранніми, миттєвими та пізніми сигналами. Всі ці три сигнали є синхронізованими на загальній частоті і корельованими з копіями вхідних дискретних даних, наданими аналогово-цифровим перетворювачем 3. Миттєві сигнали виводяться на звужену версію бажаного далекомірного сигналу, котрий передається на цикл захоплення фази тадемодулятор. Ранні та пізні сигнали використовуються для керування логікою відстеження визначника затримки. Оскільки затримані версії бажаного сигналу або знулені або сумовані дією модифікованої згортки та визначника затримки, миттєвий сигнал є більш стабільним і корисним для наступної обробки. Сигнали помилок повертаються до логіки управління приймачем 4, де вони використовуються в векторному циклі відстеження, обмеженому доступним відношенням динаміки платформи до динаміки далекомірник джерел. Оцінена динаміка платформи разом з відомою динамікою далекомірного джерела і, можливо, інші дані, використовуються для визначення управляючого сигналу зворотного зв'язку, що регулює синхронізацію визначника затримки. Реалізація векторного циклу захоплення є більш стабільною, ніж скалярний цикл захоплення, і може утримувати захоплення сигналу на нижчих рівнях відношення сигнал/шум. Отримані виміри та демодульовані навігаційні дані передаються логікою управління приймачем 4 до логіки управління постійним запам'ятовуючим пристроєм 10. Логіка управлінням постійним запам'ятовуючим пристроєм записує отримані дані на постійний запам'ятовуючий пристрій 11 у вигляді файлу. Також логіка управління постійним запам'ятовуючим пристроєм забезпечує можливість отримання користувачем даних, що зберігаються на постійному запам'ятовуючому пристрої. Джерела інформації: 1. Патент США №5343209, МПК G01S5/02, 1994; 2. Патент США №6873288, МПК G01S5/14, 2005. 5 Комп’ютерна верстка Н. Лисенко 40233 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGeodesic gnss device
Автори англійськоюKharchenko Volodymyr Petrovych, Kondratiuk Vasyl Mykhailovych, Hazniuk Maksym Oleksandrovych, Vyshniakova Yevhania Viktorivnal, Trykoz Valerii Pavlovych, Kutsenko Oleksandr Viktorovych, Vasyliev Ihor Vasyliovych
Назва патенту російськоюГеодезический gnss прибор
Автори російськоюХарченко Владимир Петрович, Кондратюк Василий Михайлович, Газнюк Максим Александрович, Вишнякова Евгения Викторовна, Трикоз Валерий Павлович, Куценко Александр Викторович, Васильев Игорь Васильевич
МПК / Мітки
МПК: G01S 5/14
Мітки: геодезичний, прилад
Код посилання
<a href="https://ua.patents.su/3-40233-geodezichnijj-gnss-prilad.html" target="_blank" rel="follow" title="База патентів України">Геодезичний gnss прилад</a>
Прилад для резонансної низькоінтенсивної фізіотерапії з використанням зовнішнього носія інформації
Номер патенту: 989
Опубліковано: 16.07.2001
Автори: Чухраєв Микола Вікторович, Чухраєва Олена Миколаївна, Писанко Олег Іванович, Самосюк Наталія Іванівна, Самосюк Іван Захарович
МПК: A61N 5/00, A61H 39/00
Мітки: носія, використанням, фізіотерапії, низькоінтенсивної, інформації, резонансної, прилад, зовнішнього
Формула / Реферат:
Прилад для резонансної низькоінтенсивної фізіотерапії з використанням зовнішнього носія інформації, що містить корпус, в якому встановлені блок живлення, контролю, автономного управління і/або управління з використанням зовнішнього носія інформації, та органи керування і індикації (БЖКУ), який включає субблок живлення, мікро-ЕОМ, обладнану пристроєм для підключення її до зовнішнього комп'ютера, пристрій створення цифрової, світлової та...
Геодезичний знак
Номер патенту: 5803
Опубліковано: 15.03.2005
Автори: Романишин Павло Олексійович, Жежера Анатолій Іванович, Готинян Василь Степанович, Чорнокінь Василь Якович, Онисько Богдан Михайлович
МПК: G01C 15/00
Мітки: геодезичний, знак
Формула / Реферат:
1. Геодезичний знак, що містить плиту, який відрізняється тим, що плита забезпечена засобами для її жорсткого кріплення на поверхні землі, а на її зовнішній поверхні виконаний контрастними кольорами графічний малюнок, що містить зображення правильної геометричної фігури.2. Геодезичний знак за п. 1, який відрізняється тим, що графічний малюнок містить зображення квадрата, в якому зображено стилізований мальтійський хрест з кругом у...
Геодезичний косинець для обміру фігури людини
Номер патенту: 54518
Опубліковано: 17.03.2003
Автори: Кузнецова Нонна Дмитріївна, Цимбал Тетяна Валентинівна
МПК: A41H 1/00
Мітки: геодезичний, обміру, фігури, косинець, людини
Формула / Реферат:
1. Геодезичний косинець для обміру фігури людини, який містить сполучені під прямим кутом дві основні планки, кожна з яких має нанесену вздовж внутрішнього краю косинця вимірювальну шкалу, причому точка початку відліку "О" обох шкал знаходиться у внутрішній точці перетину основних планок, який відрізняється тим, що додатково містить принаймні два допоміжних елементи, кожний з яких виконаний у вигляді планки з нанесеною на неї...
Скануючий прилад для оптичного вимірювання локальних деформацій субмікронної роздільної здатності на поверхні конструкційного елемента
Номер патенту: 17347
Опубліковано: 15.09.2006
Автори: Писаренко Георгій Георгійович, Копчевський Павло Михайлович
МПК: G01B 9/00, G01B 9/04, G01N 3/00
Мітки: вимірювання, поверхні, роздільної, здатності, оптичного, скануючий, прилад, елемента, субмікронної, деформацій, конструкційного, локальних
Формула / Реферат:
Скануючий прилад для оптичного вимірювання локальних деформацій субмікронної роздільної здатності на поверхні конструкційного елемента, що включає основу, на якій встановлено лазер, оптичну систему, систему фокусування, блок фотодіодів, рушій позиціонування по осі "X" та по осі "Y", блоки управління рушіями позиціонування, блок управління лазером, блок управління фокусуванням, підсилювачі сигналів фотодіодів,...
Прилад для визначення критичної частоти злиття мерехтінь
Номер патенту: 46263
Опубліковано: 15.05.2002
Автор: Охременко Ольга Романівна
МПК: A61B 5/16
Мітки: мерехтінь, частоти, визначення, критичної, злиття, прилад
Формула / Реферат:
Прилад для визначення критичної частоти злиття мерехтінь, який містить генератор імпульсів, з'єднаний з джерелом світла через пульт управління, в який входить блок управління частотою, з'єднані послідовно блок обробки та блок індикації, а також формувач яскравості, що відрізняється тим, що прилад обладнано маскою та другим джерелом світла, причому перше і друге джерела світла розташовані фронтально з тильного боку непрозорої маски на рівні...
Попередній патент: Маслоутворювач безперервної дії
Наступний патент: Спосіб лікування тромбованих підшкірних вен стегна
Випадковий патент: Спосіб інтенсивного лікування рецидиву параноїдної шизофренії з шубоподібним перебігом та агресивною поведінкою