Спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника
Номер патенту: 44969
Опубліковано: 26.10.2009
Автори: Овчаренко Віталій Володимирович, Гіршфельд Анатолій Мусійович, Сімсон Едуард Альфредович, Анацький Юрій Петрович
Формула / Реферат
Спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника, що включає етапи, на яких представляють робочу поверхню ролика у вигляді кривої, форма якої підлягає оптимізації, у відповідності з вибраним алгоритмом оптимізації контактного тиску, визначають критерії оптимізації геометричних параметрів поверхонь, що контактують, задають параметри, що варіюються, які визначають форму твірної ролика, вирішують просторову контактну задачу для ролика та внутрішнього або зовнішнього кільця роликового підшипника шляхом ітеративного наближення в рамках методу оптимізації, який відрізняється тим, що як критерій оптимізації (мінімізації) вибирають максимальне значення контактного тиску, визначене для всієї зони контакту робочої поверхні ролика та відповідної поверхні доріжки кочення роликового підшипника, твірну робочої поверхні ролика представляють як сплайн, як параметри, що варіюються, застосовують відстані від робочої поверхні ролика до доріжки кочення роликового підшипника в базових точках сплайну, застосовують метод оптимізації першого порядку, в рамках якого відбувається ітеративне наближення форми твірної робочої поверхні ролика до форми, що забезпечує мінімум функціонала якості.
Текст
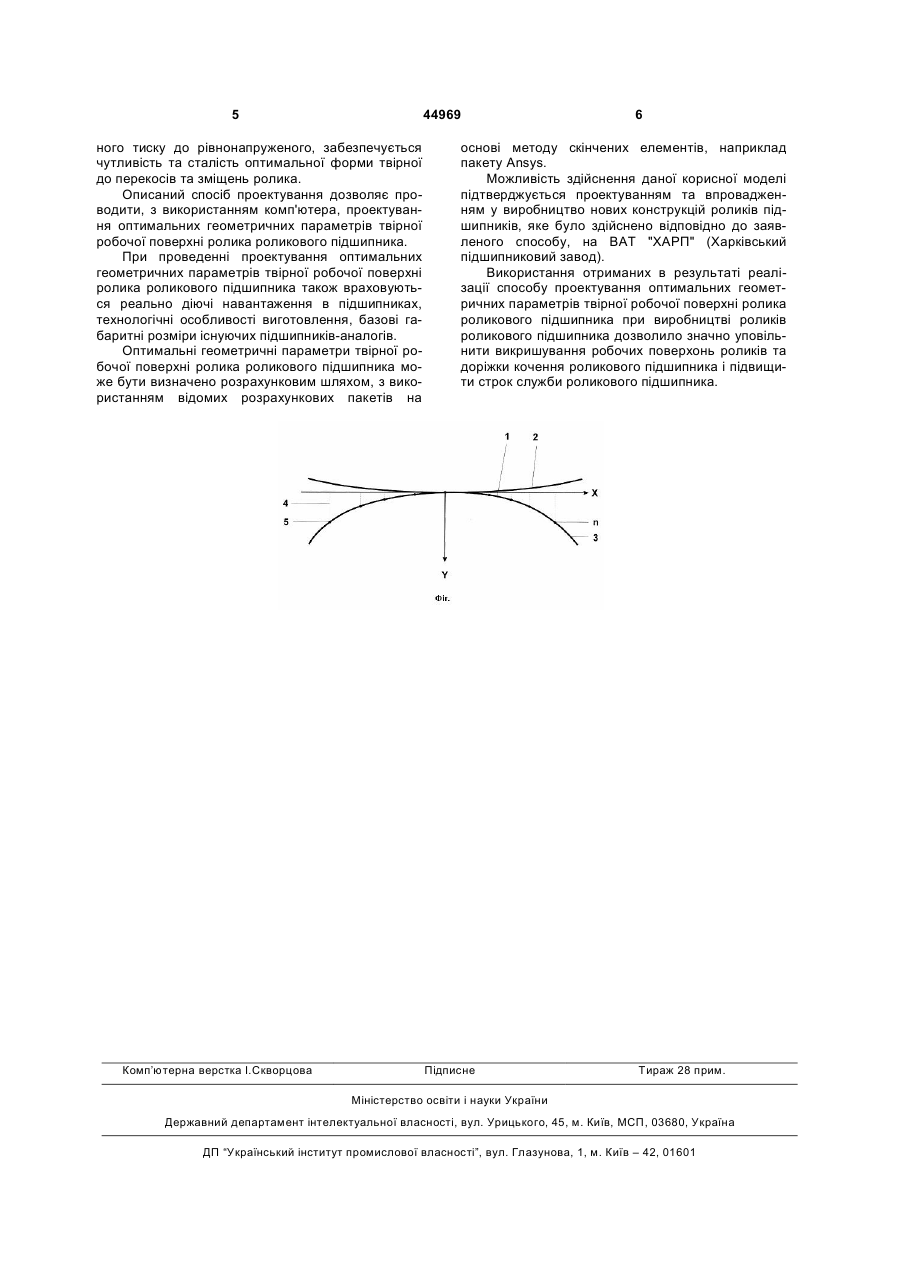
Спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника, що включає етапи, на яких представляють робочу поверхню ролика у вигляді кривої, форма якої підлягає оптимізації, у відповідності з вибраним алгоритмом оптимізації контактного тиску, визначають критерії оптимізації геометричних параметрів поверхонь, що контактують, задають параметри, що варіюються, які визнача 3 ника ) та двох циліндрів (внутрішнє кільце роликового підшипника). Найбільш близьким до технічного рішення, що заявляється, є спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника, описаний в патенті США №4456313 (опубл. 26.06.1984, кл. МПК F 16 С 33/36). що полягає в тому, що представляють робочу поверхню ролика у вигляді кривої, форма якої підлягає оптимізації, у відповідності з вибраним алгоритмом оптимізації контактного тиску, визначають критерії оптимізації геометричних параметрів поверхонь, що контактують, задають параметри, що варіюються, які визначають форму твірної ролика, вирішують просторову контактну задачу для ролика та внутрішнього або зовнішнього кільця роликового підшипника шляхом ітеративного наближення в рамках методу оптимізації. Даний спосіб дозволяє виявити величину контактного тиску та оптимізувати геометричні параметри твірної робочої поверхні ролика, забезпечити рівномірний розподіл контактного тиску вздовж твірної робочої поверхні ролика. Недоліком описаного способу є необхідність оперувати множиною з 20-25 діаметрів циліндрів, що в сукупності визначають форму твірної ролика. Метод пласких перерізів, що базується на гіпотезі про повільну зміну контактного тиску вздовж твірної, дає похибку при наближенні до зони скруглення ролика. Алгоритм оптимізації контактного тиску даного способу достатньо трудомісткий через значну кількість змінних параметрів, необхідно задавати процедуру зміни ступінчастого профілю, що відповідав би реальній гладкій твірній, оперування з гладкою твірною при даному способі неможливе. В основу корисної моделі поставлена задача створення такого способу проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника, що направлений на оптимізацію контактного тиску між твірною ролика та відповідної поверхнею доріжки кочення роликового підшипника та забезпечує спрощення процедури отримання геометричних параметрів твірної робочих поверхонь ролика та підвищення достовірності отриманих результатів. Поставлена задача вирішується тим, що у відомому способі оптимізації що включає етапи, на яких: представляють робочу поверхню ролика у вигляді кривої, форма якої підлягає оптимізації, у відповідності з вибраним алгоритмом оптимізації контактного тиску, визначають критерії оптимізації геометричних параметрів поверхонь, що контактують, задають параметри, що варіюються, які визначають форму твірної ролика, вирішують просторову контактну задачу для ролика та внутрішнього або зовнішнього кільця роликового підшипника шляхом ітеративного наближення в рамках методу оптимізації, згідно корисної моделі в якості критерію оптимізації (мінімізації) обрано максимальне значення контактного тиску визначене для всієї зони контакту, в якості параметрів, що варіюються, застосовують координати базових точок, що визначають лінію твірної як сплайн, застосовують метод оптимізації першого порядку, яким отримують оптимальну форму утворюючої ролика, 44969 4 шляхом ітеративного наближення в рамках алгоритму оптимізації, до форми, що забезпечує мінімум функціонала якості. Використання описаного способу проектування дозволяє забезпечити підвищення точності та достовірності розрахунків. Внаслідок використання способу, можливе отримання такої твірної робочої поверхні ролика роликового підшипника, яка забезпечує подовження строку служби підшипника, забезпечує уповільнення викришування втоми робочих поверхонь роликів та доріжки кочення роликового підшипника за рахунок зниження контактного тиску між робочою поверхнею роликів та доріжкою кочення роликового підшипника. Спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника ілюструється кресленням, на якому зображено контакт твірної робочої поверхні ролика та доріжки кочення роликового підшипника. Спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипникареалізується наступним чином. В якості критерію оптимізації, а саме мінімізації, обирають максимальне значення контактного тиску, визначене для всієї зони контакту робочої поверхні ролика 1 та відповідної поверхні доріжки кочення роликового підшипника 2. У варіанті вирішення контактної задачі представленому на фіг. робочу поверхня ролика 1 та відповідну поверхню доріжки кочення роликового підшипника 2 виконано випуклими. Ось координат Х проходить через зону контакту робочої поверхні ролика 1 та відповідної поверхні доріжки кочення роликового підшипника 2 та паралельна осі обертання ролика. Ось координат Y проходить через центр робочої поверхні ролика 1 і направлена до осі обертання ролика. Твірну робочої поверхні ролика 3 представляють як сплайн. В якості параметрів, що варіюються, застосовують відстані 4 від робочої поверхні ролика 1 до доріжки кочення роликового підшипника 2 (на фіг. позначено пунктирними лініями паралельними осі Y) в n базових точках сплайну 5 n. На фіг. зокрема зображено ординати базових точок 5 - n, що визначають лінію твірної робочої поверхні ролика 3 як сплайн для варіанту, коли базових точок 9. При проектуванні оптимальних геометричних параметрів твірної робочої поверхні ролика 3 роликового підшипника застосовується наступний алгоритм оптимізації. Для отримання оптимальних геометричних параметрів твірної робочої поверхні ролика 3 роликового підшипника спочатку вирішується контактна задача з незначним радіальним переміщенням (зближенням) контактуючих тіл (циліндра та доріжки кочення) без прикладення радіального навантаження. В отриманому рішенні отримують початкову пляму контакту. Потім граничні умови радіального переміщення знімають та прикладають робоче радіальне навантаження. Задача вирішується знову. Результат повторного рішення є результатом вирішення загальної контактної задачі. Алгоритм оптимізації при цьому контролюється наближенням оптимізованого контакт 5 44969 ного тиску до рівнонапруженого, забезпечується чутливість та сталість оптимальної форми твірної до перекосів та зміщень ролика. Описаний спосіб проектування дозволяє проводити, з використанням комп'ютера, проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника. При проведенні проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника також враховуються реально діючі навантаження в підшипниках, технологічні особливості виготовлення, базові габаритні розміри існуючих підшипників-аналогів. Оптимальні геометричні параметри твірної робочої поверхні ролика роликового підшипника може бути визначено розрахунковим шляхом, з використанням відомих розрахункових пакетів на Комп’ютерна верстка І.Скворцова 6 основі методу скінчених елементів, наприклад пакету Ansys. Можливість здійснення даної корисної моделі підтверджується проектуванням та впровадженням у виробництво нових конструкцій роликів підшипників, яке було здійснено відповідно до заявленого способу, на ВАТ "ХАРП" (Харківський підшипниковий завод). Використання отриманих в результаті реалізації способу проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника при виробництві роликів роликового підшипника дозволило значно уповільнити викришування робочих поверхонь роликів та доріжки кочення роликового підшипника і підвищити строк служби роликового підшипника. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for designing optimal geometric parameters of generatrix of working surface of roller of roller bearing
Автори англійськоюHirshfeld Anatolii Musiiovych, Simson Eduard Alfredovych, Anatskyi Yurii Petrovych, Ovcharenko Vitalii Volodymyrovych
Назва патенту російськоюСпособ проектирования оптимальных геометрических параметров образующей рабочей поверхности ролика роликового подшипника
Автори російськоюГиршфельд Анатолий Моисеевич, Симсон Эдуард Альфредович, Анацкий Юрий Петрович, Овчаренко Виталий Владимирович
МПК / Мітки
МПК: F16C 33/30
Мітки: спосіб, параметрів, геометричних, проектування, оптимальних, підшипника, поверхні, твірної, ролика, роликового, робочої
Код посилання
<a href="https://ua.patents.su/3-44969-sposib-proektuvannya-optimalnikh-geometrichnikh-parametriv-tvirno-robocho-poverkhni-rolika-rolikovogo-pidshipnika.html" target="_blank" rel="follow" title="База патентів України">Спосіб проектування оптимальних геометричних параметрів твірної робочої поверхні ролика роликового підшипника</a>
Спосіб проектування оптимальних геометричних параметрів контактуючих торцевих поверхонь роликового підшипника
Номер патенту: 44588
Опубліковано: 12.10.2009
Автори: Овчаренко Віталій Володимирович, Гіршфельд Анатолій Мусійович, Сімсон Едуард Альфредович, Анацький Юрій Петрович
МПК: F16C 19/22
Мітки: контактуючих, параметрів, оптимальних, спосіб, підшипника, проектування, поверхонь, геометричних, торцевих, роликового
Формула / Реферат:
Спосіб проектування оптимальних геометричних параметрів контактуючих торцевих поверхонь роликового підшипника, що включає визначення геометричних параметрів контактуючих поверхонь та розрахунок інтенсивності їх зносу, який відрізняється тим, що для кожної точки твірної борта кільця підшипника визначають траєкторію в відносному русі борта внутрішнього кільця підшипника і торця ролика, розраховують інтенсивність роботи сил тертя з урахуванням...
Спосіб визначення оптимальних конструктивно-технологічних параметрів преса-гранулятора
Номер патенту: 30058
Опубліковано: 11.02.2008
Автори: Риндюк Дмитро Вікторович, Штефан Євген Васильович
МПК: B01J 2/00
Мітки: спосіб, конструктивно-технологічних, визначення, преса-гранулятора, параметрів, оптимальних
Формула / Реферат:
Спосіб визначення оптимальних конструктивно-технологічних параметрів преса-гранулятора, який включає аналіз процеса грануляції методом екструзії, вибір параметра, формулювання задачі, розв'язування задачі та визначення плану розподілу параметрів грануляції, який відрізняється тим, що проводиться встановлення граничних обмежень -діаметр отвору, кут нахилу фаски, тиск при екструзії, вологість сировини, довжина отвору, статистична оцінка...
Спосіб визначення оптимальних технологічних параметрів обробки конструкційних матеріалів
Номер патенту: 16732
Опубліковано: 15.08.2006
Автори: Вислоух Сергій Петрович, Філіппова Марина В`ячеславівна, Волошко Оксана Вячеславовна
МПК: B23Q 15/00
Мітки: параметрів, матеріалів, технологічних, обробки, оптимальних, визначення, конструкційних, спосіб
Формула / Реферат:
Спосіб визначення оптимальних технологічних параметрів обробки конструкційних матеріалів, який полягає в тому, що на вибраному перетині зрізу при постійній для всіх швидкостей довжині різання вимірюють термоелектрорушійну силу, який відрізняється тим, що додаткого вимірюють складові сили різання, потужність різання, величину зношення інструмента, точність та шорсткість обробленої поверхні при проведенні короткочасних експериментальних...
Спосіб визначення оптимальних параметрів обробки
Номер патенту: 34450
Опубліковано: 11.08.2008
Автори: Катрук Орест Вікторович, Вислоух Сергій Петрович
МПК: B23B 1/00
Мітки: визначення, оптимальних, обробки, спосіб, параметрів
Формула / Реферат:
Спосіб визначення оптимальних параметрів обробки, який полягає в тому, що на вибраному перерізі зрізу вимірюють складові сили різання, величину зносу різального інструмента, потужність різання, точність та шорсткість обробленої поверхні при проведенні короткочасних експериментальних досліджень в довільних умовах, реєструють вказані параметри процесу різання, оброблюють результати цих досліджень з отриманням аналітичних залежностей, за...
Система визначення оптимальних технологічних параметрів обробки різанням
Номер патенту: 42222
Опубліковано: 25.06.2009
Автори: Пивовар Оксана Миколаївна, Лапіга Олександр Сергійович
МПК: B23Q 27/00, B23Q 15/00
Мітки: параметрів, система, різанням, технологічних, обробки, оптимальних, визначення
Формула / Реферат:
Система визначення оптимальних технологічних параметрів обробки різанням, що містить пристрій введення початкової інформації та виведення результатів роботи, який двостороннім зв'язком зв'язаний з блоком обробки технологічної інформації, вихід якого підключено до входу блока керування верстатом, вихід якого зв'язаний з технологічною обробляючою системою, блок реєстрації поточної інформації, вхід якого підключено до технологічної обробляючої...
Попередній патент: Каркас сейсмостійкої багатоповерхової будівлі
Наступний патент: Спосіб гідростатичного підйому крапельної рідини
Випадковий патент: Спосіб хірургічного лікування проривної виразки задньої стінки дванадцятипалої кишки та інструмент для його здійснення