Адаптивний спосіб реєстрації присутності та торкання різального інструменту до деталі
Номер патенту: 52357
Опубліковано: 16.12.2002
Автори: Силін Радомир Святославович, Скицюк Володимир Іванович
Формула / Реферат
Адаптивний спосіб реєстрації присутності та торкання різального інструменту до деталі, що включає охоплення різального інструмента осереддям індукційного перетворювача, вихідний сигнал якого підсилюють та формують інформаційний сигнал, за параметрами якого визначають присутність інструменту поблизу деталі та момент їх фізичного торкання, який відрізняється тим, що інформаційний сигнал формують з інтегральної огинаючої шумової компоненти вихідного сигналу перетворювача, при цьому постійно реєструють рівень її плинних значень та порівнюють їх з рівнем основного сигналу, ідентифікуючи малі відхилення рівня як стан присутності, а великі - як стан торкання інструменту до деталі.
Текст
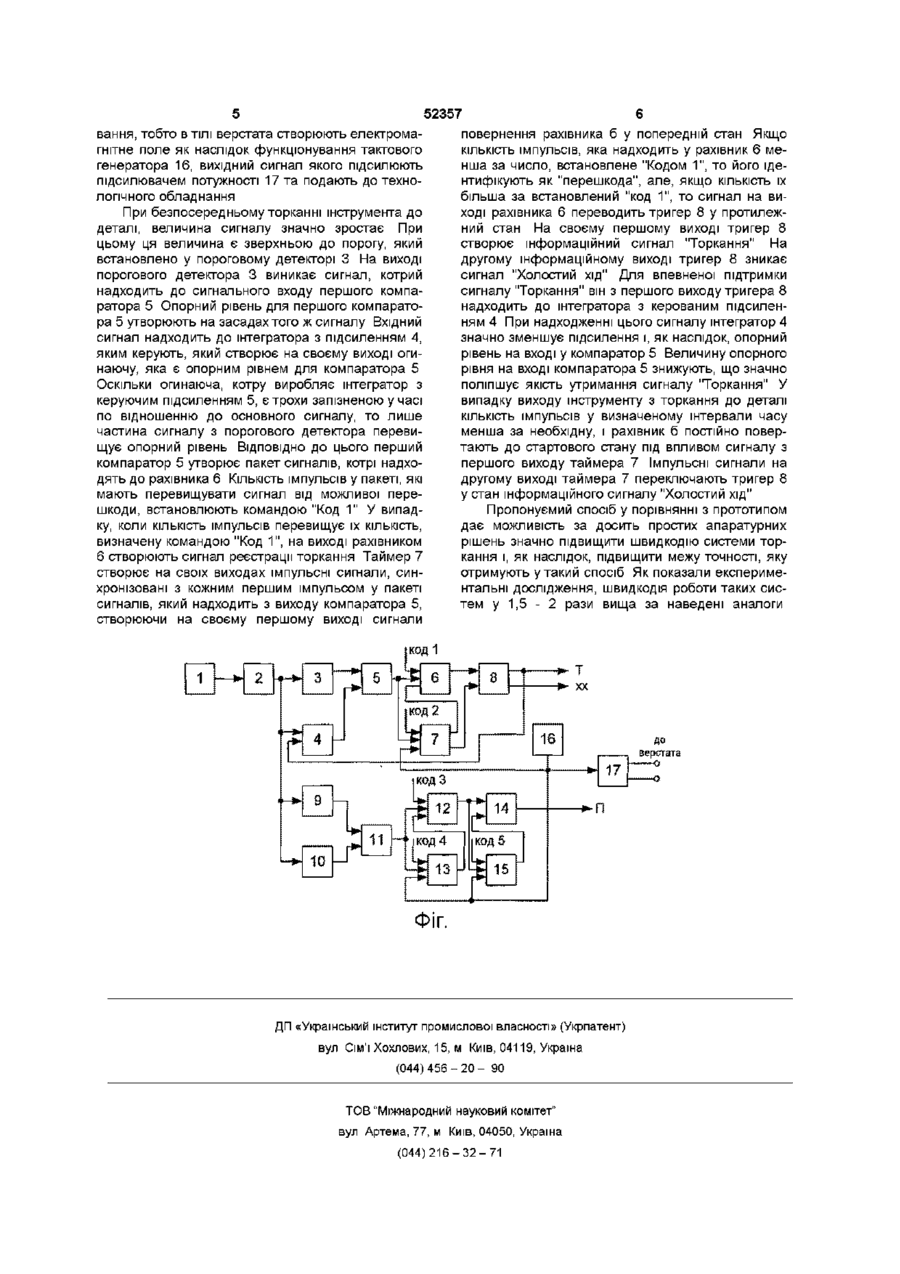
Адаптивний спосіб реєстрації присутності та торкання різального інструменту до деталі, що включає охоплення різального інструмента осе реддям індукційного перетворювача, вихідний сигнал якого підсилюють та формують інформаційний сигнал, за параметрами якого визначають присутність інструменту поблизу деталі та момент їх фізичного торкання, який відрізняється тим, що інформаційний сигнал формують з інтегральної огинаючої шумової компоненти вихідного сигналу перетворювача, при цьому постійно реєструють рівень її плинних значень та порівнюють їх з рівнем основного сигналу, ідентифікуючи малі відхилення рівня як стан присутності, а великі - як стан торкання інструменту до деталі Винахід, що пропонується, відноситься до автоматизації контролю технологічного процесу металообробки на верстатах з системою числового програмного керування Призначено для надточного визначення моменту торкання різального інструменту до деталі Відомий спосіб реєстрації присутності та торкання різального інструменту [див патент 4657451 США МКІ5 В23В39/04, 1987 р ] , згідно з яким два перетворювачі з кільцевим феритовим осердям та обмотками збудження та реєстрації встановлюють на перетині шпиндельної бабки, так, щоб вони охоплювали шпиндель верстату, а котушку збудження з'єднують з генератором високочастотного струму У момент торкання інструментом заготовки замикається електричний ланцюг системи технологічного обладнання та виникає магнітний потік, що реєструють системою обробки з підсилювача, перетворювача, інтегратора Однак спосіб реєстрації не має можливості відрізнити корисний сигнал від перешкоди, тому у пристрої присутній інтегратор, який різко знижує швидкодію всієї системи Найбільш близький до пропонуємого способу за сукупністю ознак є відомий спосіб реєстрації присутності та торкання різального інструменту [див патент 17046 А України МКІ6 B23Q15/00 від 18 03 1997 р ], згідно з яким різальний інструмент охоплюють осердям індукційного перетворювача, що встановлюють на технологічному обладнанні, а сигнал перетворювача підсилюють каналом високої чутливості та каналом низької чутливості, присутність інструмента коло деталі реєструють по високому рівню сигналу у канали високої чутливості, а по високому рівню сигналу у канали низької чутливості реєструють фізичне торкання інструмента та деталі Однак цей спосіб реєстрації має вади низьку чутливість та захищеність від перешкод каналу присутності, оскільки принципи, які покладені у спосіб реєстрації моменту присутності та торкання, однакові і відрізняються лише чутливістю каналів, а також низьку потужність пристроїв захисту корисного сигналу від перешкод В основу винаходу поставлено задачу створити такий спосіб реєстрації присутності та торкання різального инструменту, в якому шляхом спрощеного спостереження інтегральної огинаючої та и порівняння з корисним сигналом за допомогою сигналу електромагнітних шумів та перешкод досягалося б підвищення якості реєстрації процесу присутності та торкання инструменту, що призводить до підвищення ефективності визначення моменту торкання за рахунок високої швидкодії Поставлена задача виконується тим, що в адаптивному способі реєстрації присутності та торкання різального інструменту, заснованого на тому, що різальний інструмент охоплюють осереддям індукційного перетворювача, вихідний сигнал якого підсилюють та формують інформаційний 1 ю СО СЧ Ю 52357 сигнал, по параметрам якого визначають присутність інструменту поблизу деталі та момент їх фізичного торкання, який відрізняється тим, що інформаційний сигнал формують з інтегральної огинаючої шумової компоненти вихідного сигналу перетворювача, при цьому постійно реєструють рівень її плинних значень та порівнюють їх з рівнем основного сигналу, ідентифікуючи малі відхилення рівня як стан присутності, а великі - як стан торкання інструменту до деталі Підвищення точності визначення стану різального инструмента досягається тим, що здійснюють відстеження електромагнітних шумів та перешкод та сумісну обробку розподілених корисних сигналив та їх інтегрованих огинаючих сигналів присутності та торкання Це дає можливість утворювати ВИХІДНІ імпульси присутності та торкання для системи керування прецизійним верстатом з високою швидкодією ідентифікації Наведена на кресленні структурна схема пояснює суть способу реєстрації торкання та присутності різального инструменту Сутність пропонуємого адаптивного способу реєстрації торкання та присутності різального інструмента до деталі полягає у наступному З сигналу шумів шляхом інтегрування виділяють його низькочастотну огинаючу, котру постійно порівнюють з шумовим сигналом у компараторах Для цього підбирають підсилення обох сигналів (основного та інтегрованого) таким чином, щоб тільки сплески амплітуди основного сигналу перевищували рівень інтегрованого При цьому присутність інструменту коло деталі реєструється, як КІЛЬКІСТЬ імпульсів за інтервал часу, котрий визначають спеціальним кодом, як і межа КІЛЬКОСТІ імпульсів Якщо їх менше за число встановлене кодом, то це ідентифікують як перешкоду, при цьому інформацію у рахівнику знищують Однак, якщо ця КІЛЬКІСТЬ перевищує встановлену межу, рахівник утворює сигнал реєстрації "Присутності" для вихідного тригера, і після цього інформацію у рахівнику стирають в очікуванні нового накопичення При виході з зони присутності спеціальний таймер, який з появою сигналу на виході рахівника переходів у стан очікування, запускається і відпрацьовує на своєму виході чередування імпульсів, яке повертає вихідний тригер до початкового стану У випадку торкання інструменту до деталі корисний сигнал зростає значно більше, ніж при реєстрації "Присутності" При цьому, як і у випадку реєстрації "Присутності", реєструють інтегральний рівень корисного сигналу, котрий є опорним для реєстрації торкання Корисний сигнал проходить через пороговий детектор, який не пропускає загальну шумову компоненту, а лише потужний сигнал Обидва сигнали (корисний з детектора та інтегрований) надходять до ВІДПОВІДНИХ ВХОДІВ компаратора На виході компаратора утворюють імпульси, але КІЛЬКІСТЬ їх залежить від плинного інтегрованого рівня, який утворює інтегратор сигналу Імпульси надходять до рахівника, який відраховує їх КІЛЬКІСТЬ і порівнює з встановленим кодом У випадку, коли їх число менш за встановленим кодом на інтервал часу, інформація у рахівнику знищують, тому що це ідентифікують як перешкоду При перевищені числа з рахівника надходить сигнал для створення команди "Торкання" до входу тригера Попереднє число у рахівнику стирають в очікуванні чергового сигналу Інтервал визбирування імпульсів встановлюють спеціальним кодом, який визначає не тільки інтервал відрахування, але й інтервал виходу з торкання інструменту до деталі Сигнал "Торкання" створює сигнал, який перемикає інтегратор у режим малого підсилення, що дає змогу значного поліпшення процесу спостереження за сигналом "Торкання" при ВІДХОДІ інструменту від деталі Пристрій, що реалізує пропонуємий адаптивний спосіб реєстрації торкання та присутності різального інструмента до деталі, працює наступним чином Пристрій містить первинний індукційний перетворювач 1, підсилювачи 2, 10, пороговий детектор 3, інтегратори 4, 9, тригер 8, 14, компаратор 5, 11, рахівник 6, 12, таймер 7, 13, 15, тактовий генератор 16, підсилювач потужності 17 Сигнал з виходу первинного індукційного перетворювача 1, що встановлений на різальному інструменті, підсилюють підсилювачем 2 до необхідних меж Підсилений сигнал перетворюють у пороговому детекторі 3, інтеграторі з підсиленням 4, яким керують, другому інтеграторі 9 та підсилювачі 10 У випадку, коли торкання інструменту до деталі відсутнє, рівень сигналу невеликий і змінюється тільки у випадку руху інструменту на деталь При цьому пороговий детектор 3 сигналу не пропускає з-за його малої величини Натомість підсилений сигнал за допомогою підсилювача 10 надходить до компаратора 11 На опорний вхід компаратора 11 надходить огинаюча сигналу з інтегратора 9 Підсилення у підсилювачі Ю т а інтеграторі 9 підбирають таким чином, щоб КІЛЬКІСТЬ імпульсів на виході компаратора 11 була мінімальною У цьому випадку в рахівнику 12 не відбувається переповнення за інтервал часу, який встановлюють таймером 13 Код максимального числа, яке може бути записане у рахівник 12, встановлюють подачею команди "Код 3" Інтервал часу, який утворює рахівник 13 за допомогою тактових імпульсів з тактового генератора 16, утворюють за допомогою команди "Код 4" При збільшенні сигналу, коли інструмент є поблизу від деталі, амплітуда сигналу значно зростає При цьому рівень сигналу з підсилювача 10 зростає значно швидше за опорний рівень сигналу з інтегратора 9 Рахівник 12 за визначений інтервал часу ("Код 4", таймер 13) добирає необхідне число за "Кодом 3" і утворює імпульс, який переводить тригер 14 у протилежний стан, створюючи інформаційну команду "Присутність" Одночасно з цим цей же імпульс зупиняє роботу другого таймера 15, який створює імпульси скидання для повернення тригера 14 у попередню позицію Імпульси на виході другого таймера 15 зникають У випадку зменшення сигналу процес проходить у зворотньому порядку Рахівник 12 вже не нараховує достатню КІЛЬКІСТЬ імпульсів, і сигнал на його виході зникає Другий таймер 15 розблоковують, тоді починають створювати на його виході імпульси, котрі переводять тригер 14 у попередній стан Команда "Присутність" зникає Спосіб функціонує лише при умові підмагнічу 52357 вання, тобто в ТІЛІ верстата створюють електромагнітне поле як наслідок функціонування тактового генератора 16, вихідний сигнал якого підсилюють підсилювачем потужності 17 та подають до технологічного обладнання При безпосередньому торканні інструмента до деталі, величина сигналу значно зростає При цьому ця величина є зверхньою до порогу, який встановлено у пороговому детекторі 3 На виході порогового детектора 3 виникає сигнал, котрий надходить до сигнального входу першого компаратора 5 Опорний рівень для першого компаратора 5 утворюють на засадах того ж сигналу Вхідний сигнал надходить до інтегратора з підсиленням 4, яким керують, який створює на своєму виході огинаючу, яка є опорним рівнем для компаратора 5 Оскільки огинаюча, котру виробляє інтегратор з керуючим підсиленням 5, є трохи запізненою у часі по відношенню до основного сигналу, то лише частина сигналу з порогового детектора перевищує опорний рівень ВІДПОВІДНО ДО ЦЬОГО перший компаратор 5 утворює пакет сигналів, котрі надходять до рахівника 6 КІЛЬКІСТЬ імпульсів у пакеті, які мають перевищувати сигнал від можливої перешкоди, встановлюють командою "Код 1" У випадку, коли КІЛЬКІСТЬ імпульсів перевищує їх КІЛЬКІСТЬ, визначену командою "Код 1", на виході рахівником 6 створюють сигнал реєстрації торкання Таймер 7 створює на своїх виходах імпульсні сигнали, синхронізовані з кожним першим імпульсом у пакеті сигналів, який надходить з виходу компаратора 5, створюючи на своєму першому виході сигнали повернення рахівника б у попередній стан Якщо КІЛЬКІСТЬ імпульсів, яка надходить у рахівник 6 менша за число, встановлене "Кодом 1", то його ідентифікують як "перешкода", але, якщо КІЛЬКІСТЬ їх більша за встановлений "код 1", то сигнал на виході рахівника 6 переводить тригер 8 у протилежний стан На своєму першому виході тригер 8 створює інформаційний сигнал "Торкання" На другому інформаційному виході тригер 8 зникає сигнал "Холостий хід" Для впевненої підтримки сигналу "Торкання" він з першого виходу тригера 8 надходить до інтегратора з керованим підсиленням 4 При надходженні цього сигналу інтегратор 4 значно зменшує підсилення і, як наслідок, опорний рівень на вході у компаратор 5 Величину опорного рівня на вході компаратора 5 знижують, що значно поліпшує якість утримання сигналу "Торкання" У випадку виходу інструменту з торкання до деталі КІЛЬКІСТЬ імпульсів у визначеному інтервали часу менша за необхідну, і рахівник б постійно повертають до стартового стану під впливом сигналу з першого виходу таймера 7 Імпульсні сигнали на другому виході таймера 7 переключають тригер 8 у стан інформаційного сигналу "Холостий хід" Пропонуємий спосіб у порівнянні з прототипом дає можливість за досить простих апаратурних рішень значно підвищити швидкодію системи торкання і, як наслідок, підвищити межу точності, яку отримують у такий спосіб Як показали експериментальні дослідження, швидкодія роботи таких систем у 1,5 - 2 рази вища за наведені аналоги ікоді ФІГ. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive method for registering presence and touch of cutting instrument to a detail
Автори англійськоюSkytsiuk Volodymyr Ivanovych
Назва патенту російськоюАдаптивный способ регистрации присутствия и касания резательного инструмента к детали
Автори російськоюСкицюк Владимир Иванович
МПК / Мітки
МПК: B23Q 17/00, G05B 19/18
Мітки: різального, торкання, інструменту, спосіб, присутності, реєстрації, адаптивний, деталі
Код посилання
<a href="https://ua.patents.su/3-52357-adaptivnijj-sposib-reehstraci-prisutnosti-ta-torkannya-rizalnogo-instrumentu-do-detali.html" target="_blank" rel="follow" title="База патентів України">Адаптивний спосіб реєстрації присутності та торкання різального інструменту до деталі</a>
Спосіб реєстрації присутності та торкання різального інструмента
Номер патенту: 30120
Опубліковано: 15.11.2000
Автори: Скицюк Володимир Іванович, Скицюк Максим Володимирович
МПК: B23Q 17/22
Мітки: реєстрації, інструмента, спосіб, різального, присутності, торкання
Формула / Реферат:
Спосіб реєстрації присутності та торкання різального інструмента, заснований на тому, що різальний інструмент охоплюють осердям індукційного перетворювача, по вихідному сигналу якого реєструють присутність інструмента поблизу деталі та момент фізичного торкання, який відрізняється тим, що поряд з індукційним перетворювачем присутності та торкання встановлюють перетворювач електромагнітних шумів та перешкод, сигналом якого синхронізують струм...
Спосіб контролю торкання інструменту та деталі з високою точністю та надійністю
Номер патенту: 17046
Опубліковано: 18.03.1997
Автори: Остафьєв Володимир Олександрович, Скицюк Володимир Іванович, Махмудов Кабулджон Гафурович
МПК: B23Q 15/00
Мітки: точністю, торкання, надійністю, контролю, високою, спосіб, деталі, інструменту
Формула / Реферат:
Спосіб контролю торкання інструменту та деталі з високою точністю та надійністю, визначений у тому, що індукційний датчик встановлений на технологічній оброблюючій системі, сигнал датчика підсилюється каналом високої чутливості та каналом низької чутливості, який відрізняється тим, що по високому рівню сигналу у каналі високої чутливості реєструють присутність інструменту коло деталі, гальмують рух інструменту до деталі, по високому рівню...
Спосіб оцінки якості різального інструменту і деталей машин
Номер патенту: 40077
Опубліковано: 16.07.2001
Автори: Ковальов Віктор Дмитрович, Кліменко Галина Петрівна, Васильченко Яна Василівна, Мірошніченко Юрій Вікторович
МПК: C21D 6/04
Мітки: спосіб, деталей, оцінки, різального, інструменту, якості, машин
Формула / Реферат:
Спосіб оцінки якості різального інструменту і деталей машин, при якому комплексно оцінюють якість вихідних матеріалів, процесів виготовлення різального інструменту і деталей машин, який відрізняється тим, що різальний інструмент або деталі машин піддають обробці імпульсним магнітним полем, визначають їхні експлуатаційні характеристики, при цьому, якщо обробка імпульсним магнітним полем призводить до підвищення експлуатаційних характеристик -...
Спосіб підвищення зносостійкості твердосплавного різального інструменту
Номер патенту: 31610
Опубліковано: 15.12.2000
Автори: Мілько Володимир Володимирович, Мазур Микола Петрович
МПК: B22F 3/24
Мітки: інструменту, підвищення, твердосплавного, різального, зносостійкості, спосіб
Текст:
...2) перехід на обробку з нормативними режимами, що допускаються потужністю верстату і жорсткістю системи різання, яка продовжується до зношування зносостійкого поверхневого шару (5... 15 хв); 3) по завершенню цього часу проводиться відновлення зносостійкого поверхневого шару переходом на різання з оптимальною швидкістю, вирахованою для інструменту вже зношеного за попередній період роботи, і потім повторення циклу переходом на обробку з...
Спосіб визначення сил на задній поверхні різального інструменту
Номер патенту: 39602
Опубліковано: 15.06.2001
Автори: Гладкий Ярослав Миколайович, Мазур Микола Петрович, Мілько Володимир Володимирович
МПК: G01N 3/58
Мітки: задній, сіль, інструменту, визначення, різального, спосіб, поверхні
Формула / Реферат:
Спосіб визначення сил на задній поверхні різального інструменту, який включає проведення певної кількості замірів сил при сталих швидкості та глибині різання і змінній подачі, екстраполяцію на нульову товщину зрізаного шару, який відрізняється тим, що заміри сил проводять одноразово після зупинки подачі, але без зупинки головного руху, в момент короткочасної стабілізації сил, коли товщина зрізаного шару менша радіуса заокруглення різального...
Попередній патент: Пристрій для розточування кільцевих канавок в отворах корпусних деталей
Наступний патент: Контактно-поверхневий водонагрівач
Випадковий патент: Гантель (варіанти)