Спосіб реєстрації присутності та торкання різального інструмента
Номер патенту: 30120
Опубліковано: 15.11.2000
Автори: Скицюк Максим Володимирович, Скицюк Володимир Іванович


Формула / Реферат
Спосіб реєстрації присутності та торкання різального інструмента, заснований на тому, що різальний інструмент охоплюють осердям індукційного перетворювача, по вихідному сигналу якого реєструють присутність інструмента поблизу деталі та момент фізичного торкання, який відрізняється тим, що поряд з індукційним перетворювачем присутності та торкання встановлюють перетворювач електромагнітних шумів та перешкод, сигналом якого синхронізують струм високої частоти генератора поля та роботу ключового елементу, котрим розподіляють сигнал перетворювача присутності та торкання на позитивну та негативну півхвилі, які переопрацьовують на імпульси, при цьому ті імпульси, котрі перевищують опорні рівні позитивної та негативної обвідної сигналу шумів та перешкод, сумують за логічною формулою "або" окремо по присутності та торканню, порівнюють на синхронність з імпульсним сигналом перешкоди, що формують разом з визначенням позитивної та негативної обвідної півхвилі, не пропускають імпульси присутності та торкання до реєструючих блоків у випадку їх збігання у часі, і пропускають за своєї відсутності, при цьому торкання інструмента визначають по першому прийдешньому імпульсу, а присутність інструмента поблизу деталі - по відрахуванню визначеної кількості імпульсів за встановлений термін часу.
Текст
Спосіб реєстрації присутності та торкання різального інструмента, заснований на тому, що різальний інструмент охоплюють осердям індукційного перетворювача, по вихідному сигналу якого реєструють присутність інструмента поблизу деталі та момент фізичного торкання, який відрізняється тим, що поряд з індукційним перетворювачем присутності та торкання встановлюють перетворювач електромагнітних шумів та перешкод, сигналом якого синхронізують струм високої час тоти генератора поля та роботу ключового елементу, котрим розподіляють сигнал перетворювача присутності та торкання на позитивну та негативну півхвилі, які лереопрацьовуить на імпульси, при цьому ті імпульси, котрі перевищують опорні рівні позитивної та негативної обвідної1 сигналу шумів та перешкод, сумують за логічною формулою "або" окремо по присутності та торканню, порівнюють на синхронність з імпульсним сигналом перешкоди, що формують разом з визначенням позитивної та негативної обвідної1 півхвилі, не пропускають Імпульси присутності та торкання до реєструючих блоків у випадку їх збігання у часі, і пропускають за своєї відсутності, при цьому торкання інструмента визначають по першому прийдешньому імпульсу, а присутність Інструмента поблизу деталі - по відрахуванню визначено» кількості імпульсів за встановлений термін часу. і ( Винахід, що пропонується, відноситься до автоматизації контролю технологічного процесу металообробки на верстатах з системою числового програмного керування. Призначено для надточного визначення моменту торкання різального інструменту Відомий спосіб реєстрації1 присутності та торкання різального інструменту (див. патент 4657451 США МКИ В23В36/04, 1987), згідно з яким два перетворювачи з кільцевим ферітовим осердям та обмотками збудження та реєстрації встановлюють на торці шпіндельной бабки, так, щоб вони охоплювали кінцевик шпінделю верстату, а котушку збудження з'єднують з генератором високочастотного струму. У момент торкання інструментом заготовки замикається електричний ланцюг системи технологічного обладнання та виникає магнітний потік, що реєструють системою обробки з підсилювача, перетворювачів, інтегратора Однак спосіб реєстрації нє має можливості відрізнити корисний сигнал від перешкоди, тому у пристрої присутній інтегратор, який різко знижує швидкодію всієї системи Найбільш близький до пропонуємого способу за сукупністю ознак є відомий спосіб реєстрації присутності та торкання різального Інструменту (див. патент 17046 А України МКИ B23Q15/00 від 18.03.1997), згідно з яким різальний інструмент охоплюють осердям індукційного перетворювача, що встановлюють на технологічному обладнанні, та сигнал перетворювача підсилюють каналом високої чутливості та каналом низької чутливості, присутність інструмента коло деталі реєструють по високому рівню сигналу у каналі високої чутливості, а по високому рівню сигналу у каналі низької чутливості реєструють фізичне торкання Інструмента та деталі. Однак цей спосіб реєстрації' має вади: низьку чутливість каналу присутності у порівнянні з каналом торкання; знижену захищеність від перешкод, оскільки принципи, які покладені у спосіб реєстрації моменту присутності та торкання, однакові і відрізняються лише чутливістю ханалів; а також низьку потужність пристроїв захисту корисного сигналу від перешкод В основу винаходу поставлено задачу створити такий спосіб реєстрації' присутності та торкання різального Інструменту, в якому шляхом похвильової обробки та селекції корисного сигналу з допомогою сигналу електромагнітних шумів та перешкоди досягалося би підвищення якості реєстрації процесу присутності та торкання інструменту, що призводить до підвищення ефективності процесу механоборобки матеріалів та контролю стану інструменту Поставлена задача виконується тим, що в спо о СО СП 30120 собі реєстрації присутності та торкання різального інструменту, заснованому на тому, що різальний інструмент охоплюють осердям індукційного перетворювача, по вихідному сигналу якого реєструють присутність інструменту поблизу деталі та момент фізичного торкання, відрізняється тим, що поряд з індукційним перетворювачем присутності та торкання встановлюють перетворювач електромагнітних шумів та перешкод, сигналом якого синхронізують струм високої частоти генератора поля та роботу ключового елементу, котрим розподіляють сигнал перетворювача присутності та торкання на позитивну та негативну ПІВХВИЛІ, які переопрацьовують на імпульси, при цьому тіімпульси, котрі перевищують опорні рівні позитивної та негативної огинаючої сигналу шумів та перешкод, сумують за логічною формулою "або" окремо по присутності та торканню, порівнюють на синхронність з імпульсним сигналом перешкоди, що формують разом з визначенням позитивної та негативної огинаючої ПІВХВИЛІ, не пропускають імпульси присутності та торкання до реєструючих блоків в випадку їх збігання у часі, і пропускають за своєї відсутності, при цьому торкання інструменту визначають по першому прийдешнему імпульсу, а присутність інструменту поблизу деталі - по відрахуванню визначеної КІЛЬКОСТІ імпульсів за встановлений термін часу Підвищення точності визначення стану різального інструмента досягається тим, що здійснюють реєстрацію електромагнітних шумів та перешкод та сумісну обробку розподілених на позитивну та негативну ПІВХВИЛІ сигналів присутності та торкання вершиною різального інструмента поверхні деталі Це дає можливість формувати ВИХІДНІ імпульси присутності та торкання для системи керування прецизійним верстатом з високою вірогідністю ідентифікації Наведена на рисунку (фіг) структурна схема пояснює суть праці способу реєстрації торкання та присутності різального інструменту Пристрій, що реалізує пропонуємий спосіб реєстрації торкання та присутності різального інструменту, працює слідуючим чином Сигнал з виходу перетворювача 1 електромагнітних шумів та перешкод, який встановлено поряд з перетворювачем 2 присутності та торкання, надходить до блоку З обробки перешкоди та синхронізації Присутність і торкання різального інструменту та деталі визначають блоком 4 "присутність" та блоком 5 "торкання" Обробку сигналів у кожному з блоків З, 4, 5 здійснюють шляхом відокремлювання та подальшої обробки позитивної та негативної півхвиль сигналів від перетворювачів 1, 2 У каналі 6 обробки позитивної ПІВХВИЛІ блоку 3 обробки перешкоди та синхронізації відокремлюють позитивну частину ПІВХВИЛІ, порівнюють з встановленим рівнем Величину його розраховують таким чином, що цей рівень обирають вище загального рівня шумів, який надходить з перетворювача 1 але нижчий за рівень імпульсних перешкод Сигнали, які перевищують цей рівень перетворюють на імпульси перешкоди позитивної півхвилі Одночасно з цими імпульсами формують огинаючу позитивної ПІВХВИЛІ яка надходить до блоків 4 та 5 у канали 7 та 6 обробки позитивної ПІВХВИЛІ Аналогічно у каналі 8 обробки негативної півхвилі зі сигналу відо кремлюють негативну птхвилю сигналу, порівнюють амплітудою з опорним рівнем, величину якого обирають за тим же принципом, що й для позитивної півхвилі Таким же чином блоки 4, 5 містять канали 10, 11 обробки негативної ПІВХВИЛІ У разі перевищення опорного рівня блок 3 формує імпульси перешкоди, які надходять до логічної комірки 12 "або", де логічно сумуються Тому частота слідування імпульсів на виході комірки 12 у 2 рази більша, ніж робоча частота перетворювача 1 Одночасно з цими імпульсами формують огинаючу негативної ПІВХВИЛІ сигналу, яка надходить до каналу 10 блока 4 та каналу 11 блока 5 У цих каналах огинаюча є опорним рівнем при перетворенні сінусоїдального корисного сигналу на імпульси Перетворення сигналу на імпульси відбувається у разі превищення опорного рівня У логічних комірках 13 та 14 "або" імпульсні сигнали сумують У комірці 13 сумують імпульсні сигнали позитивної та негативної півхвиль каналу "присутності", а у комірці 14 сумують імпульсні сигнали каналу торкання Внаслідок такого сумування на виходах логічних комірок 13 та 14 формують частоту, яка удвоє превищує частоту роботи перетворювачів 1 та 2 У канапі синхронізації 15 блока 3 обробки формують імпульси у моменти перетину сигналу з перетворювача 1 нульового потенціалу, та розподіляють їх по споживачах, тобто логічна комірка 12, генератор 16 поля високочастотного струму, ключовий елемент 17, ключові імпульсні селектори 18 та 19, таймер 20, блоки 20 та 21 реєстрації, які виконують функцію загальної синхронізації всього пристрою Ключовий елемент 17 розподіляє сигнал з перетворювача 2 на позитивну та негативну півхвилі для подальші обробки 3 логічної комірки 13 імпульси надходять до ключового імпульсного селектора 16, яким керують імпульси перешкоди, що надходять з логічної комірки 12 "або" У моменти приходу імпульсів з комірки 12 селектор 18 перекриває сигнал до блоку 21 реєстрації Імпульси синхронізації є стартовими у роботі селектора 16 Контроль проходження імпульсів через селектор Й16 виконують кожні півперюда робочої частоти перетворювачів 1 та 2 У блоці реєстрації 21 підраховують кількість імпульсів, залежну від інтенсивності перешкод, яка прийшла за термін часу, що визначають таймером 20 У разі превищення цієї КІЛЬКОСТІ у реєструючому блоці 21 формують сигнал "присутність" З логічної комірки 14 "або" імпульси надходять до ключового імпульсного селектора 19, яким керують імпульси, що надходять з логічної комірки 12 "або" У моменти надходження імпульсів з комірки 12 селектор 19 закривається, не пропускаючи до блоку 20 реєстрації імпульси торкання Імпульси синхронізації є стартовими у роботі селектора 19 Контроль проходження імпульсів через селектор 19 виконують кожні півперюду робочої частоти перетворювачів 1 та 2 У блоці 22 реєстрації "торкання" фіксують момент приходу першого імпульсу з селектору 19, завдяки чому отримують дуже високу швидкодію роботи пристрою у порівнянні з прототипом На виході блоку 22 формують два сигнали "торкання" та "холостий хід" Суть способу реєстрації торкання та присутності полягає в слідуючому Генератором поля формують високочастотні сигнали, що впливають на 30120 систему технологічного обладнання Осердя кільцевого індукційного перетворювача охоплює державку різального інструменту, поряд з ним встановлено перетворювач електромагнітних шумів та перешкод, сигнал якого призначений для загально'і синхронізацп сигналів, що оброблюють Сигнал перешкоди оброблюють в каналі синхронізації, який формує імпульси, що керують синхронізацією ключових елементів. Крім того, сигнал, що формує перетворювач шумів та перешкод, розподіляють на дві ПІВХВИЛІ - позитивну та негативну, кожну з них окремо оброблюють у відповідному каналі Імпульс перешкоди формують у тому випадку, коли півхвиля виходить за межі рівня, який встановлений автоматизованою системою керування технологічним обладнанням Імпульси синхронізації надходять до генератора високочастотного струму та синхронізують його сигнали Одночасно з цим сигнал синхронізації керує ключовим елементом, який розподіляє корисний інформативний сигнал з перетворювача присутності та торкання на дві півхвилі - позитивну та негативну, синхронізовані з півхвилями перешкоди Одночасно в каналах обробки позитивної та негативної півхвилі відокремлюють огинаючу з позитивної та негативної частин сигналу перешкоди та подають до каналів позитивної та негативної півхвилі блоків присутності та торкання для формування опорного рівня. Якщо в цих каналах амплітуди сигналу превищують цей рівень, сигнали перетворюють на імпульсні. ВИХІДНІ імпульси з виходів позитивних та негативних каналів попарно сумують логічними комірками, окремо з кожного блоку, тобто перешкод, присутності та торкання. Внаслідок такого сумування частота сигналу, яка надходить до реєструючих блоків, зростає у ДВІЧІ, а з нею і швидкодія приладу при реєстрації торкання. Для того, щоб не пропустити сигнали перешкоди, які надходять разом з корисним з перетворювачем присутності та торкання до реєструючих блоків, ключові імпульсні селектори закриваються у момент приходу імпульсів перешкоди Сигнал торкання формують по приходу першого імпульсу з блоку торкання, а сигнал присутності - по відрахуванню певної кількості імпульсів за визначений термін часу, який формують таймером Пропонуємий спосіб в зрівнянні з прототипом дає можливість з високою вірогідністю визначати присутність та момент торкання різального інструмента та деталі, що підвищує точність та ефективність прецизійного процесу механообробки на верстатах з числовим програмним керуванням в умовах автоматизованого виробництва 30120 ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42,295-61-97 Підписано до друку і/9 ОЦ 2003 р Формат 60x84 1/8 Обсяг fi, І У обл -вид арк Тираж 34 прим Зам 3с ^ УкрІНТЕІ, 03680 Киів-39МСП вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of recording of presence and contact of cutting tool
Назва патенту російськоюСпособ регистрации присутствия и касания режущего инструмента
МПК / Мітки
МПК: B23Q 17/22
Мітки: реєстрації, інструмента, різального, присутності, спосіб, торкання
Код посилання
<a href="https://ua.patents.su/4-30120-sposib-reehstraci-prisutnosti-ta-torkannya-rizalnogo-instrumenta.html" target="_blank" rel="follow" title="База патентів України">Спосіб реєстрації присутності та торкання різального інструмента</a>
Спосіб контролю торкання інструменту та деталі з високою точністю та надійністю
Номер патенту: 17046
Опубліковано: 18.03.1997
Автори: Остафьєв Володимир Олександрович, Скицюк Володимир Іванович, Махмудов Кабулджон Гафурович
МПК: B23Q 15/00
Мітки: інструменту, надійністю, контролю, торкання, високою, деталі, спосіб, точністю
Формула / Реферат:
Спосіб контролю торкання інструменту та деталі з високою точністю та надійністю, визначений у тому, що індукційний датчик встановлений на технологічній оброблюючій системі, сигнал датчика підсилюється каналом високої чутливості та каналом низької чутливості, який відрізняється тим, що по високому рівню сигналу у каналі високої чутливості реєструють присутність інструменту коло деталі, гальмують рух інструменту до деталі, по високому рівню...
Спосіб обробки різального інструменту
Номер патенту: 21741
Опубліковано: 20.01.1998
Автори: Костів Євстахій Теодорович, Ткачов Володимир Іванович, Василишин Василь Григорович, Гнатишак Микола Миколайович, Гребенюк Станіслав Олексійович, Інжейчик Григорій Іванович, Витвицький Віктор Іванович, Бережницька Марія Пилипівна, Соснін Микола Олексійович, Тарнавський Мирослав Львович
Мітки: інструменту, різального, спосіб, обробки
Формула / Реферат:
1. Спосіб обробки різального інструменту, що містить процес обдувки плазмовим потоком, який відрізняється тим, що обробку проводять на повітрі, а в плазмоутворюючий газ вводиться органічна речовина, яка розкладається з виділенням водню, котрий насичує поверхню інструменту та фіксується.2. Спосіб по п. 1, який відрізняється тим, що обдувку ведуть 2-3 сек.
Композиція для виготовлення абразивного інструмента та спосіб його одержання
Номер патенту: 6475
Опубліковано: 29.12.1994
Автори: Черняк Борис Іванович, Ключківська Марія Степанівна, Никипанчук Михайло Васильович, Срібний Василь Михайлович, Багрійчук Василь Олексійович, Козак Степан Іванович, Ключківський Андрій Іванович, Ключківський Юрій Андрійович, Кривошня Наталія Степанівна
МПК: C08J 5/14, B24D 5/00, B24D 7/00
Мітки: виготовлення, інструмента, композиція, абразивного, одержання, спосіб
Формула / Реферат:
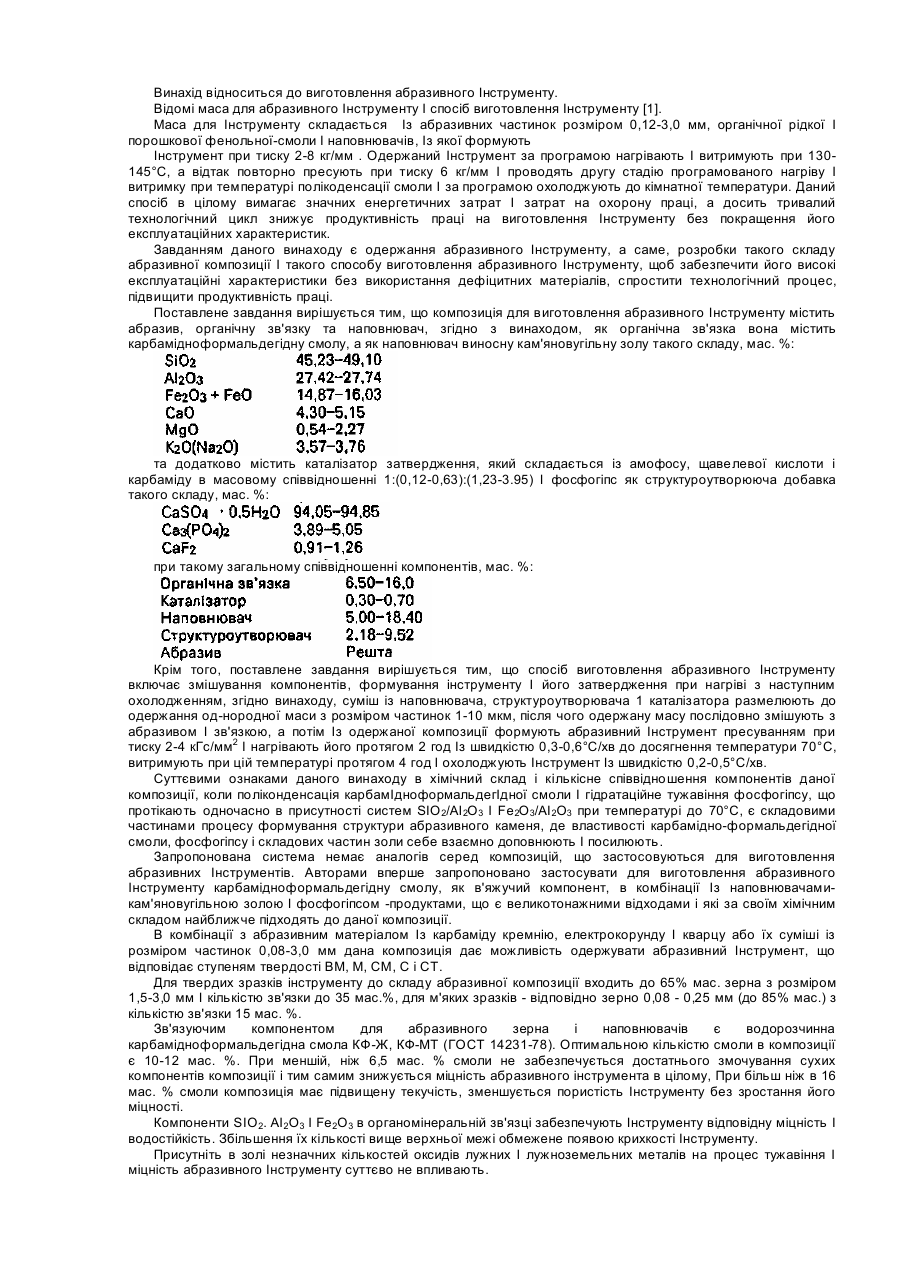
1. Композиція для виготовлення абразивного інструменту, що містить абразив, органічну зв'язку і наповнювач, яка відрізняється тим, що як органічну зв'язку вона містить карбамідноформальдегідну смолу, а як наповнювач - виносну кам'яновугільну золу такого складу, мас. %: SiO2 45,23-49,10 Аl2О3 27,42-27,74 Fе2O3+FеО 14,87-16,03 СаO ...
Вузол кріплення різального комплекту вовчків
Номер патенту: 29076
Опубліковано: 16.10.2000
Автори: Білий Вячеслав Іванович, Литвиненко Олександр Анатолійович, Некоз Олександр Іванович, Некоз Сергій Олександрович
МПК: A22C 5/00, A22C 17/00
Мітки: вовчків, вузол, кріплення, різального, комплекту
Формула / Реферат:
Вузол кріплення різального комплекту вовчків, що складається з послідовно встановлених на вихідному валу ножів, решіток і підшипника, який розміщено за вихідною решіткою і притискнуто гайкою і контргайкою, який відрізняється тим, що між підшипником і гайкою встановлено пружний елемент.
Вузол кріплення різального комплекту вовчків
Номер патенту: 17372
Опубліковано: 15.04.1997
Автори: Слинько Олександр Іванович, Некоз Олександр Іванович, Білий Вячеслав Іванович, Литвиненко Олександр Анатолійович
МПК: A22C 17/00, A22C 5/00
Мітки: різального, вовчків, комплекту, кріплення, вузол
Формула / Реферат:
Вузол кріплення різального комплекту вовчків, що складається з послідовно встановлених на вихідному валу ножів і решіток, які розміщено в гільзі вовчка та закріплено через проміжну втулку за допомогою притискної гайки, який відрізняється тим, що на вихідному валу, який має різьбовий хвостовик, за вихідною решіткою встановлено підшипник, який притискнуто до вихідної решітки гайкою і зафіксовано контргайкою.
Попередній патент: Пристрій для перемішування рідин у резервуарах
Наступний патент: Спосіб підвищення біологічної цінності харчових продуктів, фармацевтичних, медичних, косметичних засобів
Випадковий патент: Спосіб комплексного лікування генералізованого пародонтиту