Механізм петельника швейної машини ланцюгового стібка
Номер патенту: 56716
Опубліковано: 25.01.2011
Автори: Єсипенко Катерина Володимирівна, Пищиков В'ячеслав Олексійович

Формула / Реферат
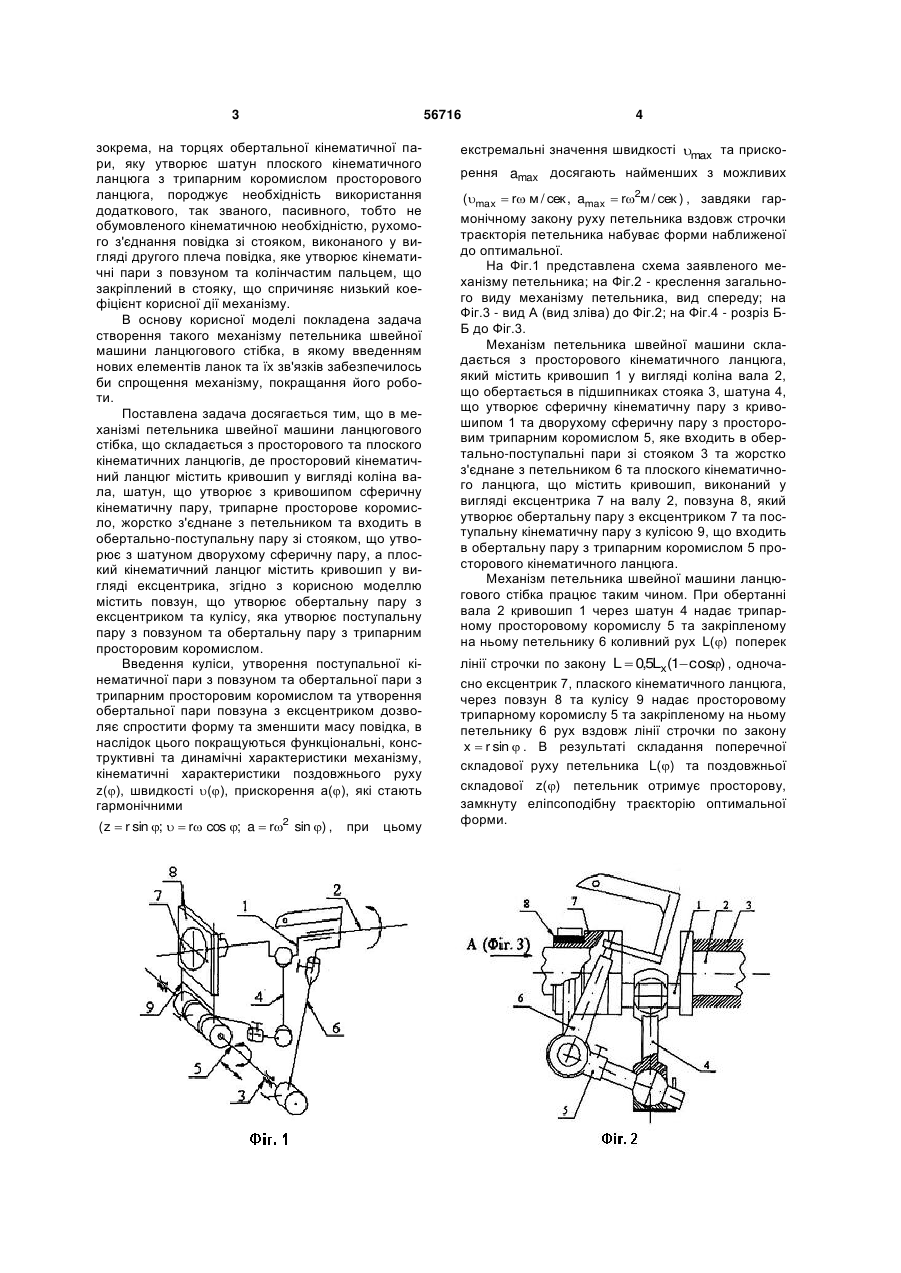
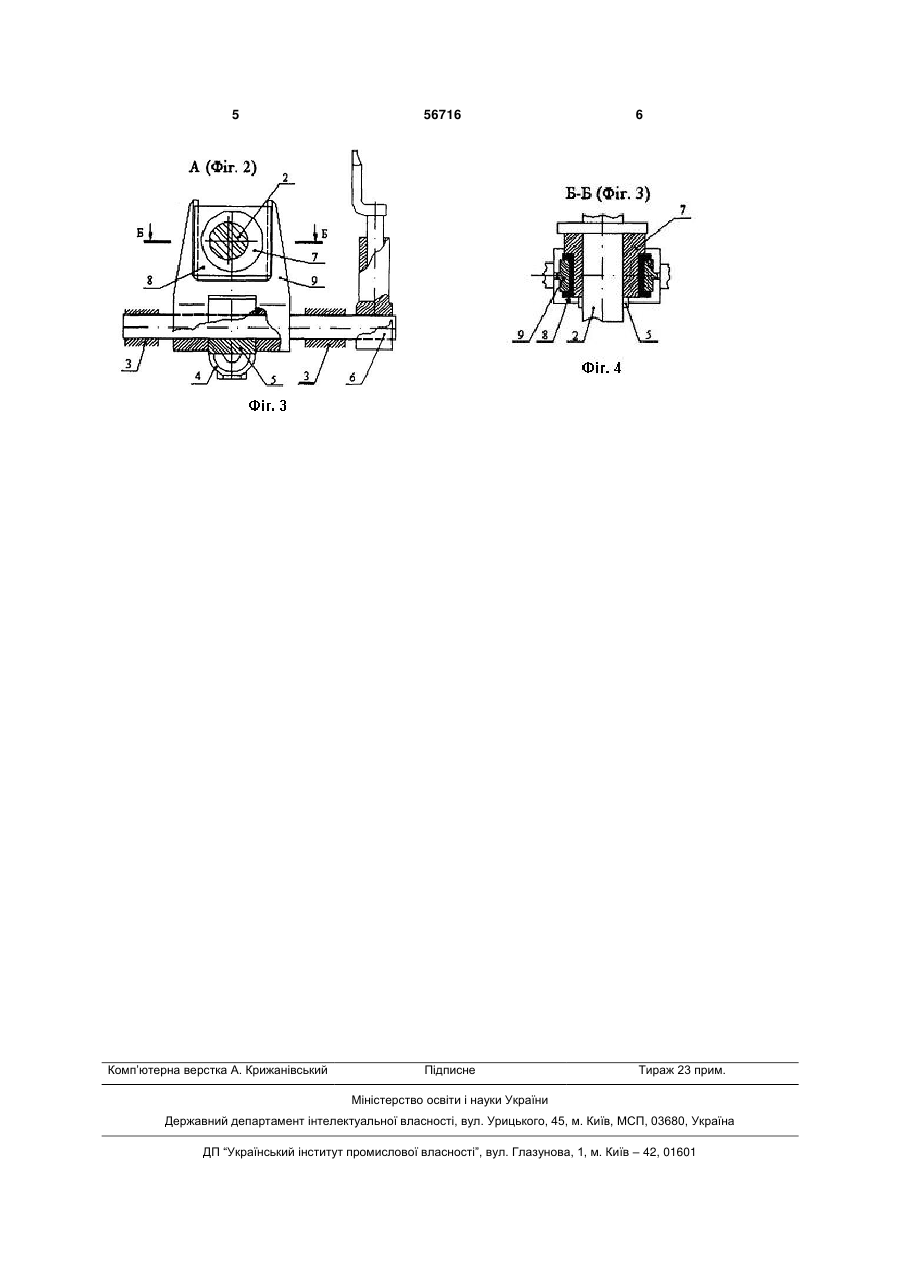
Механізм петельника швейної машини ланцюгового стібка, що складається з просторового та плоского кінематичних ланцюгів, де просторовий кінематичний ланцюг містить кривошип у вигляді коліна вала, шатун, що утворює з кривошипом сферичну кінематичну пару, трипарне просторове коромисло, жорстко з'єднане з петельником та входить в обертально-поступальну пару зі стояком, що утворює з шатуном дворухому сферичну пару, а плоский кінематичний ланцюг містить кривошип у вигляді ексцентрика та повзуна, який відрізняється тим, що оснащений кулісою, яка утворює поступальну кінематичну пару з повзуном та обертальну пару з трипарним просторовим коромислом, при цьому повзун утворює обертальну пару з ексцентриком.
Текст
Механізм петельника швейної машини ланцюгового стібка, що складається з просторового та плоского кінематичних ланцюгів, де просторовий кінематичний ланцюг містить кривошип у вигляді 3 56716 зокрема, на торцях обертальної кінематичної пари, яку утворює шатун плоского кінематичного ланцюга з трипарним коромислом просторового ланцюга, породжує необхідність використання додаткового, так званого, пасивного, тобто не обумовленого кінематичною необхідністю, рухомого з'єднання повідка зі стояком, виконаного у вигляді другого плеча повідка, яке утворює кінематичні пари з повзуном та колінчастим пальцем, що закріплений в стояку, що спричиняє низький коефіцієнт корисної дії механізму. В основу корисної моделі покладена задача створення такого механізму петельника швейної машини ланцюгового стібка, в якому введенням нових елементів ланок та їх зв'язків забезпечилось би спрощення механізму, покращання його роботи. Поставлена задача досягається тим, що в механізмі петельника швейної машини ланцюгового стібка, що складається з просторового та плоского кінематичних ланцюгів, де просторовий кінематичний ланцюг містить кривошип у вигляді коліна вала, шатун, що утворює з кривошипом сферичну кінематичну пару, трипарне просторове коромисло, жорстко з'єднане з петельником та входить в обертально-поступальну пару зі стояком, що утворює з шатуном дворухому сферичну пару, а плоский кінематичний ланцюг містить кривошип у вигляді ексцентрика, згідно з корисною моделлю містить повзун, що утворює обертальну пару з ексцентриком та кулісу, яка утворює поступальну пару з повзуном та обертальну пару з трипарним просторовим коромислом. Введення куліси, утворення поступальної кінематичної пари з повзуном та обертальної пари з трипарним просторовим коромислом та утворення обертальної пари повзуна з ексцентриком дозволяє спростити форму та зменшити масу повідка, в наслідок цього покращуються функціональні, конструктивні та динамічні характеристики механізму, кінематичні характеристики поздовжнього руху z(), швидкості (), прискорення a(), які стають гармонічними ( z r sin ; r cos ; a r2 sin ) , при цьому 4 екстремальні значення швидкості max та прискорення amax досягають найменших з можливих (max r м / сек , amax r2м / сек ) , завдяки гармонічному закону руху петельника вздовж строчки траєкторія петельника набуває форми наближеної до оптимальної. На Фіг.1 представлена схема заявленого механізму петельника; на Фіг.2 - креслення загального виду механізму петельника, вид спереду; на Фіг.3 - вид А (вид зліва) до Фіг.2; на Фіг.4 - розріз ББ до Фіг.3. Механізм петельника швейної машини складається з просторового кінематичного ланцюга, який містить кривошип 1 у вигляді коліна вала 2, що обертається в підшипниках стояка 3, шатуна 4, що утворює сферичну кінематичну пару з кривошипом 1 та дворухому сферичну пару з просторовим трипарним коромислом 5, яке входить в обертально-поступальні пари зі стояком 3 та жорстко з'єднане з петельником 6 та плоского кінематичного ланцюга, що містить кривошип, виконаний у вигляді ексцентрика 7 на валу 2, повзуна 8, який утворює обертальну пару з ексцентриком 7 та поступальну кінематичну пару з кулісою 9, що входить в обертальну пару з трипарним коромислом 5 просторового кінематичного ланцюга. Механізм петельника швейної машини ланцюгового стібка працює таким чином. При обертанні вала 2 кривошип 1 через шатун 4 надає трипарному просторовому коромислу 5 та закріпленому на ньому петельнику 6 коливний рух L() поперек лінії строчки по закону L 0,5Lx(1 cos) , одночасно ексцентрик 7, плаского кінематичного ланцюга, через повзун 8 та кулісу 9 надає просторовому трипарному коромислу 5 та закріпленому на ньому петельнику 6 рух вздовж лінії строчки по закону x r sin . В результаті складання поперечної складової руху петельника L() та поздовжньої складової z() петельник отримує просторову, замкнуту еліпсоподібну траєкторію оптимальної форми. 5 Комп’ютерна верстка А. Крижанівський 56716 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLooper mechanism of chain- stitch sewing machine
Автори англійськоюPyschykov Viacheslav Oleksiiovych, Yesypenko Kateryna Volodymyrivna
Назва патенту російськоюМеханизм петлителя швейной машины цепного стежка
Автори російськоюПищиков Вячеслав Алексеевич, Есипенко Екатерина Владимировна
МПК / Мітки
МПК: D05B 1/00
Мітки: ланцюгового, стібка, механізм, петельника, машини, швейної
Код посилання
<a href="https://ua.patents.su/3-56716-mekhanizm-petelnika-shvejjno-mashini-lancyugovogo-stibka.html" target="_blank" rel="follow" title="База патентів України">Механізм петельника швейної машини ланцюгового стібка</a>
Однорейковий механізм просування матеріалу швейної машини
Номер патенту: 54973
Опубліковано: 25.11.2010
Автори: Пищиков В'ячеслав Олексійович, Орловський Броніслав Вікентійович, Поладич Іван Валентинович
МПК: D05B 27/00
Мітки: швейної, машини, просування, механізм, однорейковий, матеріалу
Формула / Реферат:
Однорейковий механізм просування матеріалу швейної машини, який містить функціональну групу горизонтального переміщення зубчастої рейки, що містить ексцентрик, кінематично з'єднаний з шатуном, що утворює подвійну обертальну кінематичну пару з коромислом та другим шатуном, з'єднаним з трипарним коромислом, друге плече якого входить в обертальну кінематичну пару з третім шатуном, та функціональну групу вертикального переміщення зубчастої...
Механізм транспортування матеріалу човникової швейної машини

Номер патенту: 45116
Опубліковано: 26.10.2009
Автори: Пищиков В'ячеслав Олексійович, Поладич Іван Валентинович
МПК: D05B 27/00
Мітки: транспортування, човникової, механізм, матеріалу, машини, швейної
Формула / Реферат:
Механізм транспортування матеріалу човникової швейної машини, що містить дві функціональні групи горизонтального та вертикального переміщення, остання з яких включає тричленний кривошип, кінематично з'єднаний з шатуном, що утворює обертову кінематичну пару з тричленним коромислом, та діаду першого виду, яка включає шатун, на якому закріплена зубчаста рейка, та короткий шатун, який відрізняється тим, що короткий шатун виконаний у вигляді...
Механізм голки швейної машини з комбінованим транспортом матеріалу

Номер патенту: 49450
Опубліковано: 26.04.2010
Автор: Горобець Василь Андрійович
МПК: D05B 3/02
Мітки: голки, швейної, матеріалу, машини, механізм, комбінованим, транспортом
Формула / Реферат:
Механізм голки швейної машини з комбінованим транспортом матеріалу, що містить встановлений в корпусі машини кривошип, закріплений на головному валу і кінематично з'єднаний з верхньою головкою шатуна, нижня головка якого кінематично з'єднана з повідком, закріпленим на голководі, повзун, з'єднаний з пальцем, виконаним за одне ціле з коромислом-кулісою, що з'єднане кінематично з шатуном, який відрізняється тим, що додатково містить другий...
Механізм голки швейної машини з комбінованим транспортом матеріалу

Номер патенту: 48851
Опубліковано: 12.04.2010
Автори: Манойленко Олександр Петрович, Горобець Василь Андрійович
МПК: D05B 3/02
Мітки: швейної, машини, транспортом, матеріалу, комбінованим, механізм, голки
Формула / Реферат:
Механізм голки швейної машини з комбінованим транспортом матеріалу, що містить кривошип, закріплений на головному валу і з'єднаний обертовою кінематичною парою з верхньою головкою шатуна, нижня головка якого з'єднана другою обертовою парою з повідком, закріпленим на голководі, з'єднаним з першим коромислом-кулісою, повзун, з'єднаний з пальцем, виконаним за одне ціле з другим коромислом-кулісою, що з'єднане поступальною кінематичною парою з...
Механізм човника швейної машини зигзаг стрічки
Номер патенту: 49059
Опубліковано: 12.04.2010
Автори: Музичишин Сергій Володимирович, Макатьора Дмитро Анатолійович
МПК: D05B 3/00
Мітки: зигзаг, машини, швейної, стрічки, механізм, човника
Формула / Реферат:
1. Механізм човника швейної машини зигзаг стрічки, що містить човниковий вал, на якому закріплений човник, пару конічних зубчастих коліс, одне з яких встановлено на човниковому валу, та привід з валом, який відрізняється тим, що оснащений прискорювачем з додатковим валом, на якому закріплено друге зубчасте конічне колесо, а прискорювач з'єднаний з валом приводу.2. Механізм човника швейної машини зигзаг стрічки за п. 1, який...
Попередній патент: Лобовий фрикційний варіатор
Наступний патент: Механізм накатування полотна круглов’язальної машини
Випадковий патент: Скоба для гвинтового з'єднання профільованих деталей рам