Планетарний редуктор з паралелограмним приводом
Номер патенту: 60123
Опубліковано: 10.06.2011
Автори: Орлова Світлана Сергіївна, Амбарцумянц Роберт Вачаганович
Формула / Реферат
1. Планетарний редуктор з паралелограмним приводом, який містить корпус, кришку, центральні рухоме і нерухоме зубчасті колеса, два сателіти, що виконані з можливістю планетарного руху, приводний вал, водило, два сателіти, що виконані з можливістю кругово-поступального руху веденого центрального колеса, який відрізняється тим, що нерухоме циліндричне колесо встановлено в кришці, воно виконано з зовнішніми зубцями і зачеплене з сателітами, які виконані з можливістю планетарного руху з передаточним відношенням між ними "мінус одиниця", на валах цих сателітів жорстко встановлені циліндричні зубчасті колеса, які зачеплені з другими зубчастими колесами з передаточним відношенням між ними "мінус одиниця" і встановлені нерухомо на других валах, які рухомо встановлені на водило, а на кінцях цих валів жорстко встановлені сателіти, що виконані з можливістю кругово-поступального руху.
2. Планетарний редуктор за п. 1, який відрізняється тим, що на сателітах, що виконані з можливістю кругово-поступального руху, виконані отвори, діаметр яких більше половини різниці діаметрів веденого центрального колеса і колеса, що виконано з можливістю кругово-поступального руху.
Текст
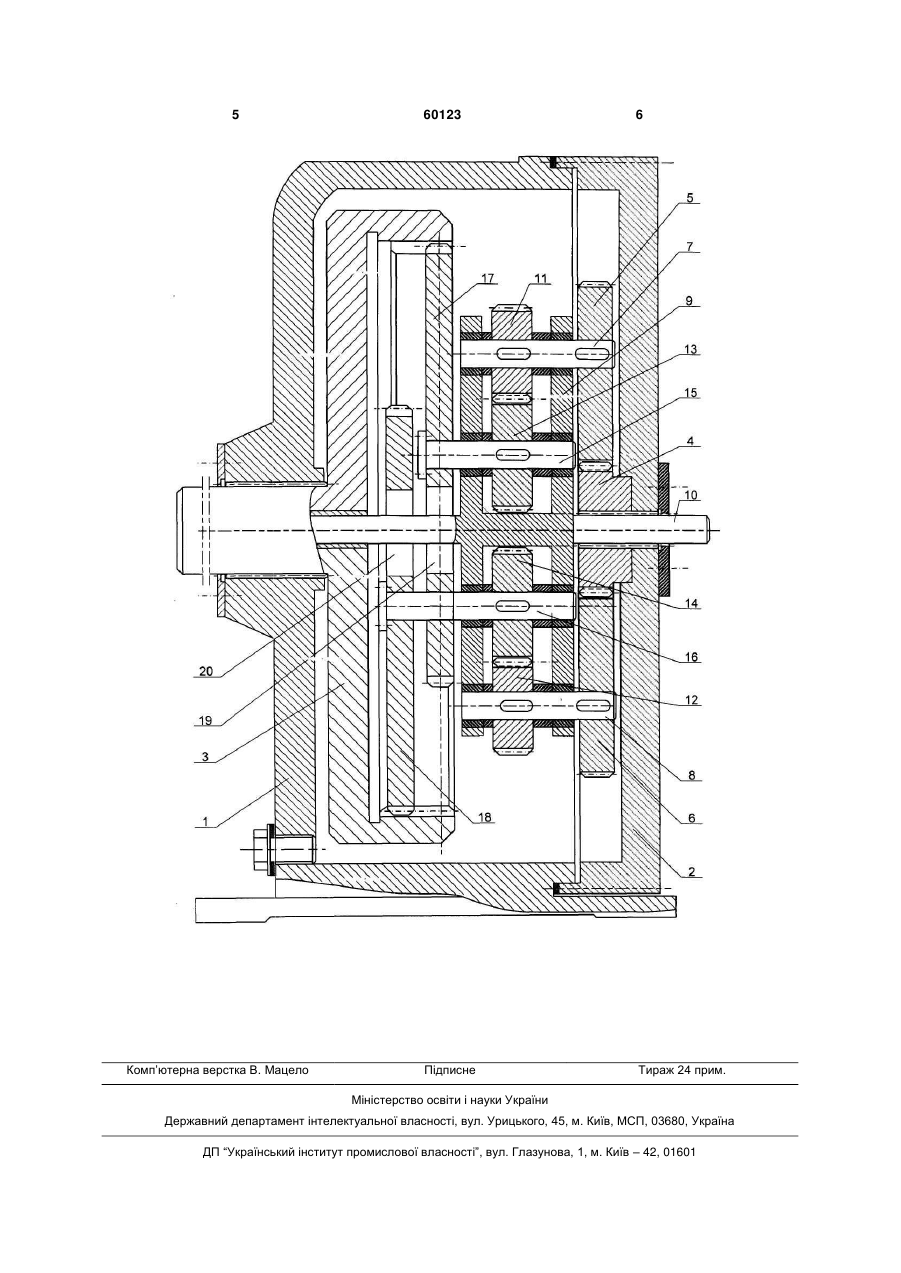
1. Планетарний редуктор з паралелограмним приводом, який містить корпус, кришку, центральні рухоме і нерухоме зубчасті колеса, два сателіти, що виконані з можливістю планетарного руху, приводний вал, водило, два сателіти, що виконані з можливістю кругово-поступального руху веденого центрального колеса, який відрізняється тим, що нерухоме циліндричне колесо встановлено в кришці, воно виконано з зовнішніми зубцями і зачеп 3 4. Велика енергоємність, яка викликається деформацією окремих деталей із-за наявності пасивних зв'язків. 5. Висока імовірність заклинювання механізму із-за наявності пасивних зв'язків та неминучості помилок при виготовленні деталей редуктора. В основу корисної моделі поставлено задачу розробити конструкцію планетарного редуктора, в якому за рахунок зміни конструктивних елементів виключити пасивні зв'язки у приводі для поступального руху сателітів і тим самим понизити жорсткі вимоги по точності виготовлення деталей, підвищити надійність та довговічність роботи редуктора. Поставлена задача вирішена в конструкції планетарного редуктора з паралелограмним приводом, який містить корпус, кришку, центральні циліндричні рухоме і нерухоме зубчасті колеса, два сателіти, що виконані з можливістю планетарного руху, приводний вал, водило, два сателіти, що виконані з можливістю кругово-поступального руху і зачіпляються з веденим центральним колесом, встановленим співвісно з водилом, нерухоме циліндричне колесо встановлено в кришці і виконано з зовнішніми зуб'ями з можливістю зачеплення з сателітами з передаточним відношенням «мінус одиниця», і які виконують планетарний рух, на валах цих сателітів жорстко встановлені циліндричні зубчасті колеса, які зачеплені з другими зубчастими колесами з передаточним відношенням між ними «мінус одиниця», вали цих зубчастих коліс встановлені на водило і на кінцях цих валів жорстко встановлені сателіти, які виконані з можливістю кругово-поступального руху, на цих сателітах виконано отвори, діаметр яких більше половини різниці діаметрів веденого центрального колеса і колеса, виконаного з можливістю круговопоступального руху, щоб виключати перетинання вала водила під час руху. Таке конструктивне виконання планетарного редуктора з паралелограмним приводом забезпечує кругово-поступальний рух сателітів, які зачіплюються з рухомим центральним колесом, виключає пасивні зв'язки у конструкції, і тим самим підвищує надійність та довговічність роботи редуктора, зменшує собівартість виготовлення. Планетарний редуктор з паралелограмним приводом зображено на кресленні - в перерізі. Планетарний редуктор з паралелограмним приводом складається із корпусу 1, на який неру 60123 4 хомо посаджена кришка 2. В корпусі 1 рухомо посаджено ведене центральне колесо 3 з внутрішніми зубцями, а в кришці 2 нерухомо посаджено друге центральне колесо 4 з зовнішніми зубцями. З колесом 4 діаметрально протилежно зачіпляються сателіти 5 і 6 з передаточним відношенням між ними «мінус одиниця», які виконують планетарний рух. Сателіти 5 і 6 встановлені за допомогою шпонок на валах 7 і 8 відповідно. Вали 7 і 8 рухомо встановлені на водилі 9, яке виконано як одне ціле з привідним валом 10. Привідний вал 10 одним кінцем рухомо встановлено в кришці 2, а другим кінцем – в центрі веденного центрального колеса 3 співвісно з ним і на підшипниках. На валах 7 і 8 за допомогою шпонок встановлені зубчасті колеса 11 і 12 з можливістю зачеплення з зубчастими колесами 13 і 14, відповідно, з передаточним відношенням між ними «мінус одиниця». Зубчасті колеса 13, 14 за допомогою шпонки встановлені на валах 15 і 16 відповідно. Вали 15, 16 рухомо встановлені на водило 9. На кінцях валів 15 і 16 нерухомо встановлені сателіти 17, 18, які виконані з можливістю кругово-поступального руху і діаметрально протилежно зачеплені з веденим центральним колесом 3. На зубчастих колесах 17, 18 виконані отвори 19 і 20, що виключають перетинання сателітами 17, 18 вала водила під час руху. Діаметр цих отворів повинен бути більшим половини різниці діаметрів центрального веденого колеса 3 і сателіта 17 або 18. Планетарний редуктор з паралелограмним приводом працює наступним чином. Рух від електродвигуна, або другого джерела (не показаного на кресленні) передається приводному валу 10. Від приводного вала 10 рух передається водилу 9, яке обертається навколо осі приводного вала 10, як одне ціле з ним. Сателіти 5, 6 обкатуються навколо нерухомого колеса 4 та обертають вали 7 і 8. Вали 7 і 8 при обертанні навколо своїх осей приводять в обертальний рух колеса 11, 13 і 12, 14. Так як передаточне відношення між колесами 4, 5 і 4, 6, а також між колесами 11, 13 і 12, 14 дорівнює «мінус одиниця», то сателіти 17 і 18, які розташовані нерухомо на валах 15 і 16, відповідно, виконують кругово-поступальний рух. Саме сателіти 17, 18 знаходяться в зачепленні з веденим центральним колесом 3 і приводять його в обертальний рух. Отвори 19, 20 у сателітах 17, 18 виключають перетинання ними вала водила. 5 Комп’ютерна верстка В. Мацело 60123 6 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPlanetary gear reducer with parallelogram drive
Автори англійськоюAmbartsumiants Robert Vachahanovych, Orlova Svitlana Serhiivna
Назва патенту російськоюПланетарный редуктор с параллелограммным приводом
Автори російськоюАмбарцумянц Роберт Вачаганович, Орлова Светлана Сергеевна
МПК / Мітки
МПК: F16H 29/08
Мітки: паралелограмним, приводом, редуктор, планетарний
Код посилання
<a href="https://ua.patents.su/3-60123-planetarnijj-reduktor-z-paralelogramnim-privodom.html" target="_blank" rel="follow" title="База патентів України">Планетарний редуктор з паралелограмним приводом</a>
Планетарний редуктор з паралелограмним приводом
Номер патенту: 46873
Опубліковано: 11.01.2010
Автори: Орлова Світлана Сергіївна, Амбарцумянц Роберт Вачаганович
МПК: F16H 29/00
Мітки: планетарний, паралелограмним, редуктор, приводом
Формула / Реферат:
Планетарний редуктор з паралелограмним приводом, який складається із корпусу, кришки, центрального рухомого циліндричного зубчастого колеса, двох сателітів, приводного вала з зубчастими колесами, водила, який відрізняється тим, що зубчасте колесо приводного вала виконано з внутрішніми зуб'ями і встановлено в корпусі нерухомо і співвісно з приводним валом, який встановлено співвісно з центральним колесом на двох опорах: одна опора - в...
Планетарний редуктор з паралелограмним приводом
Номер патенту: 34310
Опубліковано: 11.08.2008
Автори: Орлова Світлана Сергіївна, Амбарцумянц Роберт Вачаганович
МПК: F16H 29/00
Мітки: редуктор, приводом, планетарний, паралелограмним
Формула / Реферат:
Планетарний редуктор з паралелограмним приводом, що складається із корпусу, кришки, кільця, центрального циліндричного зубчастого колеса, двох сателітів, привідного вала з зубчастими колесами, водила, виконаного у вигляді двох валів для приводу сателітів, який відрізняється тим, що вали для приводу сателітів виконані колінчатими, а сателіти виконані збірними у вигляді цілісних циліндричних зубчастих вінців, жорстко закріплених на обох...
Планетарний редуктор
Номер патенту: 43159
Опубліковано: 15.11.2001
Автори: Гевко Іван Богданович, Шевчук Ігор Михайлович
МПК: F16H 1/28
Мітки: редуктор, планетарний
Формула / Реферат:
Планетарний редуктор, що містить корпус, вхідний і вихідний вали, центральні колеса, водило, сателіти, який відрізняється тим, що сателіти планетарного редуктора виконані складеними із маточини і зубчастого вінця, причому зубчастий вінець, що виготовлений із гвинтової заготовки, насаджено на маточину і одним або кількома витками прикріплено до неї, а решта витків кінематично зв'язані із поверхнею маточини з можливістю зворотно-поступального...
Планетарний редуктор лисс
Номер патенту: 9246
Опубліковано: 15.09.2005
Автори: Лиховид Юрій Макарович, Сорока Леонід Михайлович, Скамбричий Володимир Вікторович
МПК: F16H 1/28
Мітки: редуктор, планетарний, лисс
Формула / Реферат:
1. Планетарний редуктор, що містить корпус (1), в якому встановлені швидкохідний вал (2), тихохідний вал (3), зовнішнє зубчаcте колесо (4) з внутрішніми зубами (5), що мають перші контактні профілі (30), водило (6, 7), що з'єднане з тихохідним валом (3), декілька встановлених ексцентрично в водилі сателітів (8) з зовнішніми зубами (9), що мають другі контактні профілі (31), та центральну шестірню (10), з'єднану з швидкохідним валом (2), який...
Планетарний редуктор

Номер патенту: 62395
Опубліковано: 15.12.2003
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович, Задорожний Андрій Віталійович
МПК: F16H 57/00
Мітки: планетарний, редуктор
Формула / Реферат:
Планетарний редуктор, який складається з корпусу, центрального зубчатого колеса, сателіта, водила і привідного вала, який відрізняється тим, що водило виконане в вигляді двох ексцентрично, діаметрально протилежно встановлених на підшипниках кочення в корпусі і кільці, встановленому на голчатому підшипнику всередині центрального зубчатого колеса, валів, на яких жорстко закріплені зубчаті колеса, що входять у зчеплення з зубчатим колесом,...
Попередній патент: Високовольтний імпульсний конденсатор з плівковим діелектриком
Наступний патент: Композиція інгредієнтів для десерту
Випадковий патент: Доменна піч