Пристрій для автоматичної адресації об’єктів, котрі рухаються
Номер патенту: 61177
Опубліковано: 17.11.2003
Автори: Павленко Анатолій Робертович, Сорока Сергій Михайлович, Горбунов Олександр Григорович, Баронов Сергій Михайлович
Формула / Реферат
Устройство для автоматического адресования движущихся объектов, содержащее датчик обратной связи, первый и второй элементы И, реверсивный счетчик, блок сравнения, блок включения привода исполнительного механизма, причем выход датчика обратной связи соединен с первыми входами первого и второго элементов И, выходы которых соединены с суммирующим и вычитающим входами реверсивного счетчика соответственно, выход которого соединен с первым информационным входом блока сравнения, выходы ”Больше” и ”Меньше” которого соединены соответственно с входами ”Вперед” и ”Назад” блока включения привода исполнительного механизма и соответственно с вторыми входами первого и второго элементов И, запускающий выход блока включения привода исполнительного механизма является выходом устройства, отличающееся тем, что, с целью повышения производительности и надежности, в него введены блок управления и элемент НЕ, причем второй информационный блок сравнения соединен с информационным выходом блока управления, а выход ”Равенство” - с первым входом запроса блока управления, второй вход запроса которого через элемент НЕ соединен с сигнальным выходом блока включения привода исполнительного механизма, выход ”Сброс” блока управления соединен с установочным входом реверсивного счетчика.
Текст
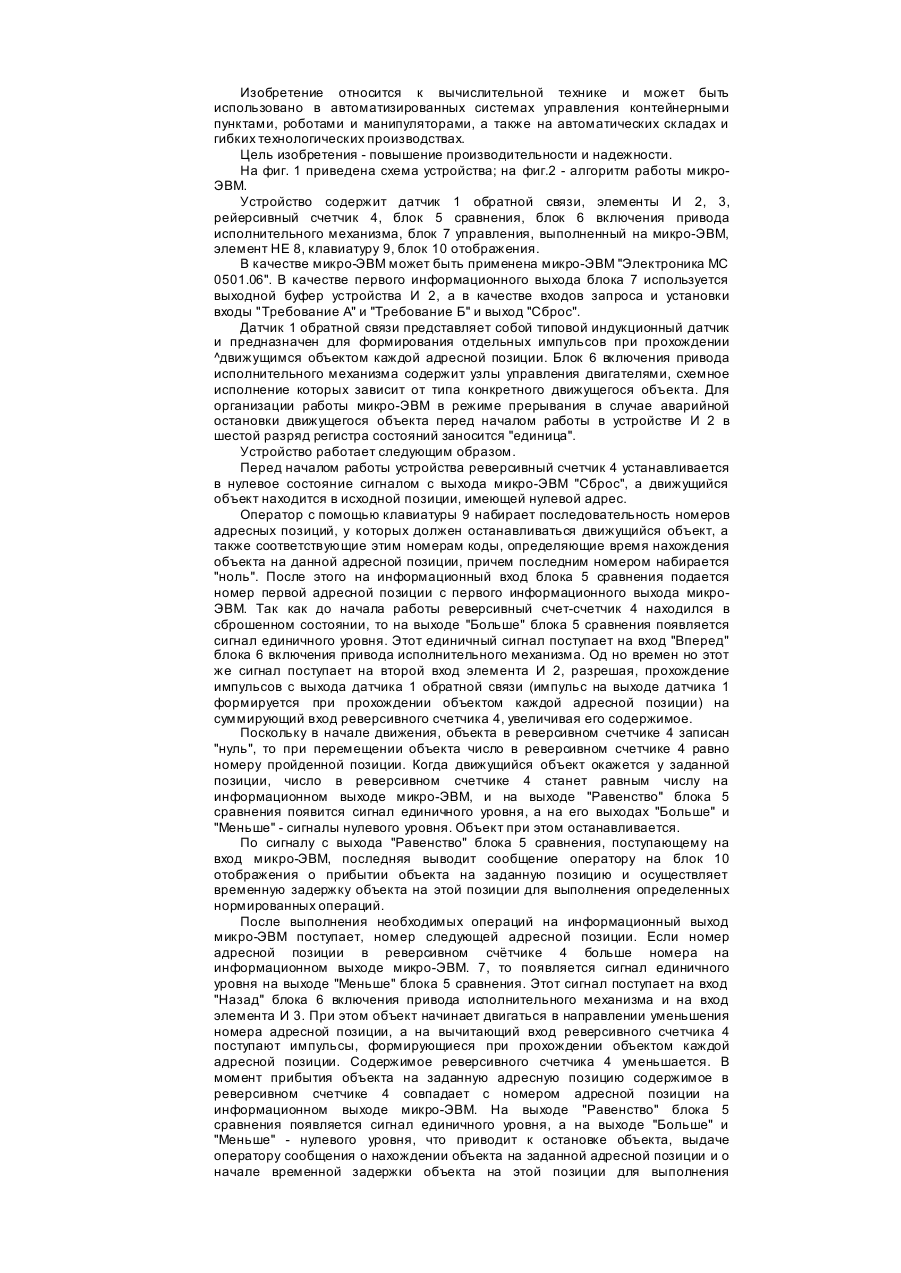
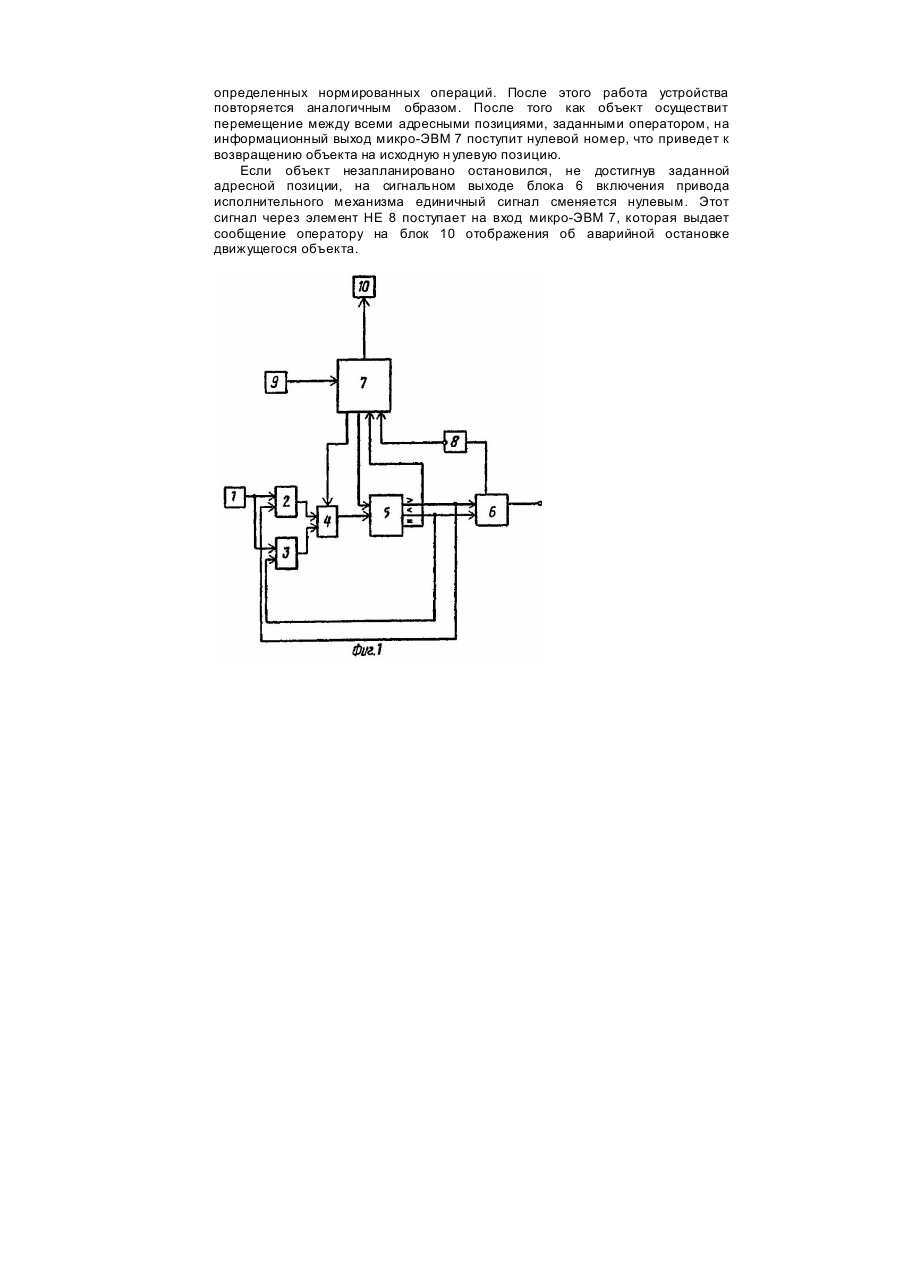
Изобретение относится к вычислительной технике и может быть использовано в автоматизированных системах управления контейнерными пунктами, роботами и манипуляторами, а также на автоматических складах и гибких технологических производствах. Цель изобретения - повышение производительности и надежности. На фиг. 1 приведена схема устройства; на фиг.2 - алгоритм работы микроЭВМ. Устройство содержит датчик 1 обратной связи, элементы И 2, 3, рейерсивный счетчик 4, блок 5 сравнения, блок 6 включения привода исполнительного механизма, блок 7 управления, выполненный на микро-ЭВМ, элемент НЕ 8, клавиатуру 9, блок 10 отображения. В качестве микро-ЭВМ может быть применена микро-ЭВМ "Электроника МС 0501.06". В качестве первого информационного выхода блока 7 используется выходной буфер устройства И 2, а в качестве входов запроса и установки входы "Требование А" и "Требование Б" и выход "Сброс". Датчик 1 обратной связи представляет собой типовой индукционный датчик и предназначен для формирования отдельных импульсов при прохождении ^движущимся объектом каждой адресной позиции. Блок 6 включения привода исполнительного механизма содержит узлы управления двигателями, схемное исполнение которых зависит от типа конкретного движущегося объекта. Для организации работы микро-ЭВМ в режиме прерывания в случае аварийной остановки движущегося объекта перед началом работы в устройстве И 2 в шестой разряд регистра состояний заносится "единица". Устройство работает следующим образом. Перед началом работы устройства реверсивный счетчик 4 устанавливается в нулевое состояние сигналом с выхода микро-ЭВМ "Сброс", а движущийся объект находится в исходной позиции, имеющей нулевой адрес. Оператор с помощью клавиатуры 9 набирает последовательность номеров адресных позиций, у которых должен останавливаться движущийся объект, а также соответствующие этим номерам коды, определяющие время нахождения объекта на данной адресной позиции, причем последним номером набирается "ноль". После этого на информационный вход блока 5 сравнения подается номер первой адресной позиции с первого информационного выхода микроЭВМ. Так как до начала работы реверсивный счет-счетчик 4 находился в сброшенном состоянии, то на выходе "Больше" блока 5 сравнения появляется сигнал единичного уровня. Этот единичный сигнал поступает на вход "Вперед" блока 6 включения привода исполнительного механизма. Од но времен но этот же сигнал поступает на второй вход элемента И 2, разрешая, прохождение импульсов с выхода датчика 1 обратной связи (импульс на выходе датчика 1 формируется при прохождении объектом каждой адресной позиции) на суммирующий вход реверсивного счетчика 4, увеличивая его содержимое. Поскольку в начале движения, объекта в реверсивном счетчике 4 записан "нуль", то при перемещении объекта число в реверсивном счетчике 4 равно номеру пройденной позиции. Когда движущийся объект окажется у заданной позиции, число в реверсивном счетчике 4 станет равным числу на информационном выходе микро-ЭВМ, и на выходе "Равенство" блока 5 сравнения появится сигнал единичного уровня, а на его выходах "Больше" и "Меньше" - сигналы нулевого уровня. Объект при этом останавливается. По сигналу с выхода "Равенство" блока 5 сравнения, поступающему на вход микро-ЭВМ, последняя выводит сообщение оператору на блок 10 отображения о прибытии объекта на заданную позицию и осуществляет временную задержку объекта на этой позиции для выполнения определенных нормированных операций. После выполнения необходимых операций на информационный выход микро-ЭВМ поступает, номер следующей адресной позиции. Если номер адресной позиции в реверсивном счётчике 4 больше номера на информационном выходе микро-ЭВМ. 7, то появляется сигнал единичного уровня на выходе "Меньше" блока 5 сравнения. Этот сигнал поступает на вход "Назад" блока 6 включения привода исполнительного механизма и на вход элемента И 3. При этом объект начинает двигаться в направлении уменьшения номера адресной позиции, а на вычитающий вход реверсивного счетчика 4 поступают импульсы, формирующиеся при прохождении объектом каждой адресной позиции. Содержимое реверсивного счетчика 4 уменьшается. В момент прибытия объекта на заданную адресную позицию содержимое в реверсивном счетчике 4 совпадает с номером адресной позиции на информационном выходе микро-ЭВМ. На выходе "Равенство" блока 5 сравнения появляется сигнал единичного уровня, а на выходе "Больше" и "Меньше" - нулевого уровня, что приводит к остановке объекта, выдаче оператору сообщения о нахождении объекта на заданной адресной позиции и о начале временной задержки объекта на этой позиции для выполнения определенных нормированных операций. После этого работа устройства повторяется аналогичным образом. После того как объект осуществит перемещение между всеми адресными позициями, заданными оператором, на информационный выход микро-ЭВМ 7 поступит нулевой номер, что приведет к возвращению объекта на исходную н улевую позицию. Если объект незапланировано остановился, не достигнув заданной адресной позиции, на сигнальном выходе блока 6 включения привода исполнительного механизма единичный сигнал сменяется нулевым. Этот сигнал через элемент НЕ 8 поступает на вход микро-ЭВМ 7, которая выдает сообщение оператору на блок 10 отображения об аварийной остановке движущегося объекта.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatic addressing of moving objects
Автори англійськоюPavlenko Anatoliy Robertovych, Pavlenko Anatolii Robertovych, Soroka Serhii Mykhailovych
Назва патенту російськоюУстройство для автоматической адресации движущихся объектов
Автори російськоюПавленко Анатолий Робертович, Сорока Сергей Михайлович
МПК / Мітки
МПК: G06F 7/76, G06F 15/00
Мітки: адресації, котрі, автоматичної, рухаються, об'єктів, пристрій
Код посилання
<a href="https://ua.patents.su/3-61177-pristrijj-dlya-avtomatichno-adresaci-obehktiv-kotri-rukhayutsya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичної адресації об’єктів, котрі рухаються</a>
Пристрій автоматичної стабілізації механізмів, що рухаються
Номер патенту: 5853
Опубліковано: 29.12.1994
Автори: Булін Мирон Васильович, Волобой Володимир Іванович, Бадовський Василь Степанович, Козачок Борис Дмитрович
МПК: G01C 9/00, A01G 25/00, A01G 25/02
Мітки: механізмів, пристрій, рухаються, стабілізації, автоматичної
Формула / Реферат:
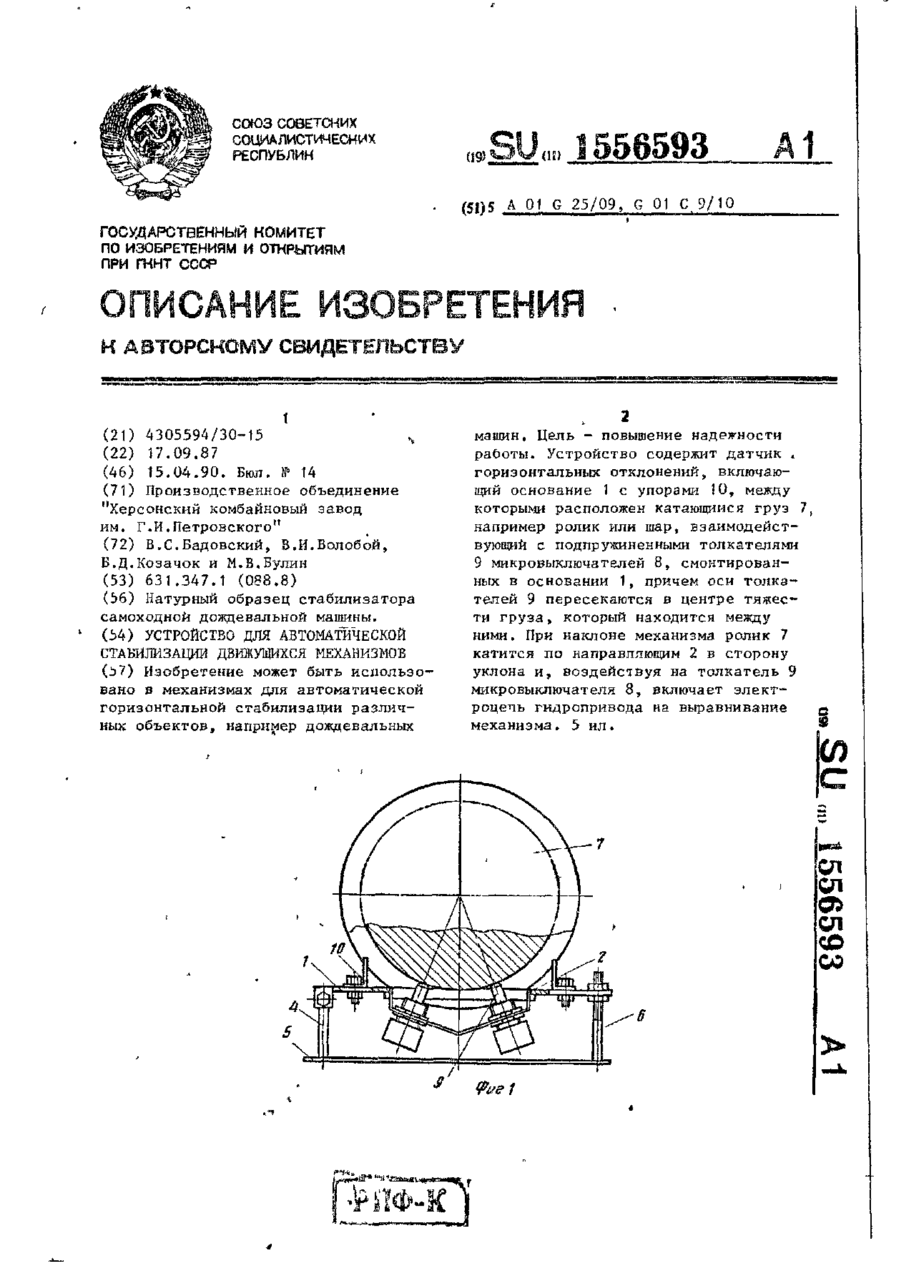
Устройство для автоматической стабилизации движущихся механизмов, включающее основание с упорами и расположенный между ними катающийся груз, взаимодействующий с контактами, отличающееся тем, что, с целью повышения надежности работы, контакты выполнены в виде микровыключателей с подпружиненными толкателями, которые смонтированы в основании под углом к нему, обеспечивающим пересечение осей толкателей в центре тяжести груза.
Пристрій для автоматичної настройки дугогасних реакторів
Номер патенту: 19533
Опубліковано: 25.12.1997
Автори: Кошин Борис Олексійович, Чупайленко Олексій Андрійович, Зозуля Олександр Вікторович, Кобазєв Володимир Павлович
МПК: H02H 9/00
Мітки: настройки, пристрій, автоматичної, реакторів, дугогасних
Формула / Реферат:
Устройство для автоматической настройки дугогасящих реакторов, содержащее блок измерения, входы которого подключены к датчикам напряжения фаз и напряжения нейтрали, исполнительный элемент, отличающееся тем, что оно снабжено двумя последовательно включенными пороговыми элементами и реле времени, первым логическим элементом исключающее ИЛИ, последовательно соединенным с третьим реле времени, первым формирователем короткого импульса...
Пристрій для автоматичної розбраковки тканин
Номер патенту: 5905
Опубліковано: 29.12.1994
Автори: Тімофеєв Костянтин Васильойвич, Бражник Олександр Михайлович, Храпливий Анатоль Петрович
МПК: D06H 3/00
Мітки: автоматичної, тканин, розбраковки, пристрій
Формула / Реферат:
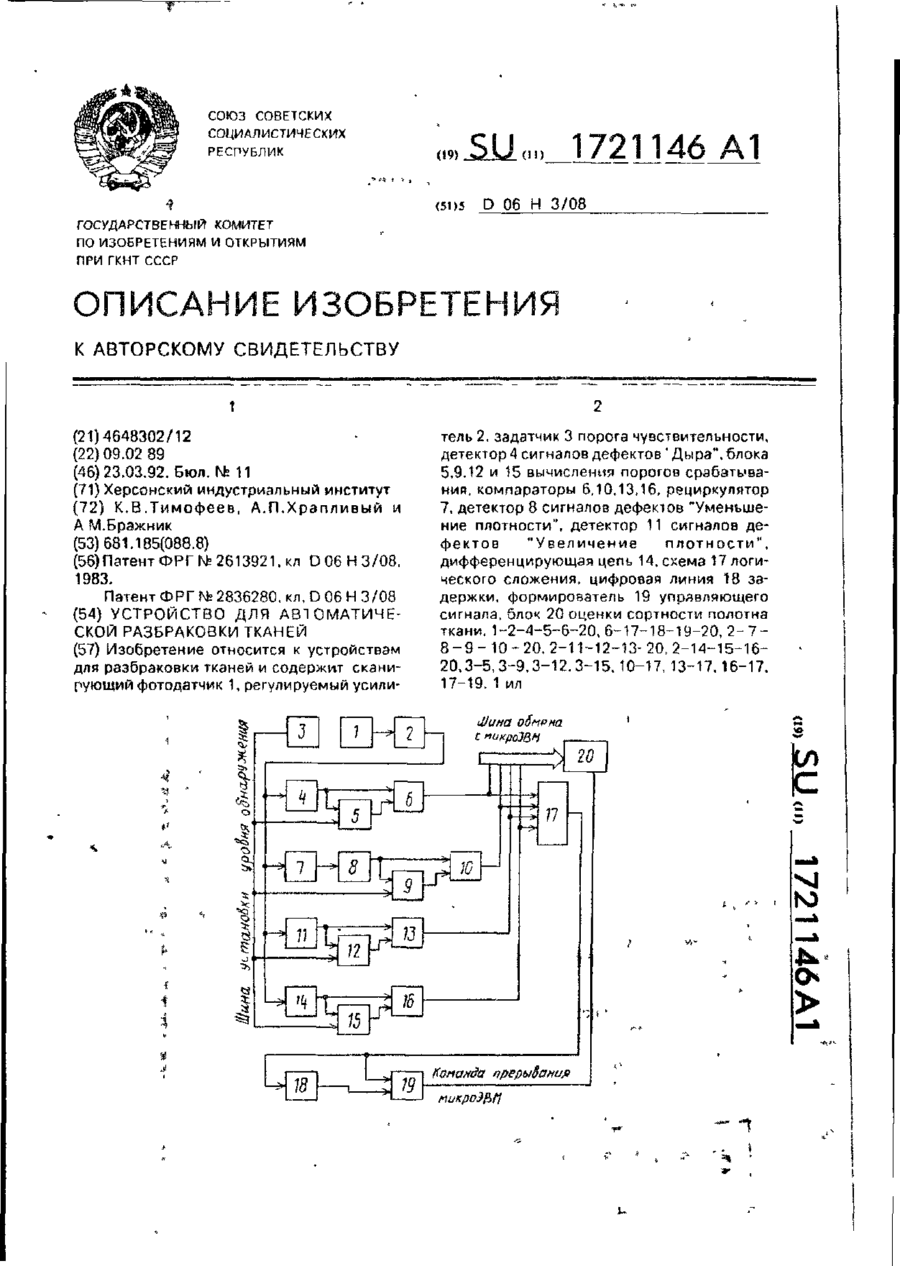
Устройство для автоматической разбраковки тканей, содержащее сканирующий фотодатчик, выходом соединенный через регулируемый усилитель с входами детектора сигнала дефекта «Дыра», детектора сигнала дефекта «Увеличение плотности» и дифференцирующей цепи, выходы которых связаны с первыми входами соответствующих первых схем сравнения, детектор сигнала дефекта «Уменьшение плотности», выходом соединенный с первым входом второй схемы сравнения,...
Пристрій видачі рекомендацій для управління киснево-конверторним процесом виплавки сталі

Номер патенту: 44383
Опубліковано: 15.02.2002
Автори: Коваль Петро Миколайович, Мельник Ірина Юріївна, Сколобанов Анатолій Винидіктович, Каменєв Юрій Сергійович, Васильєв Володимир Іванович, Коноваленко Віктор Васильович
Мітки: сталі, виплавки, пристрій, процесом, рекомендацій, видачі, киснево-конверторним, управління
Формула / Реферат:
Устройство выдачи рекомендаций для управления кислородно-конвертерным процессом выплавки стали, содержащее блок определения времени продувки, соединенный с блоком измерения интенсивности газообразования СО2, первый блок сравнения, соединенный с вторым ключом, второй блок сравнения, соединенный с первым ключом, отличающееся тем, что, с целью повышения качества выходного продукта и экономии энергоматериалов, оно дополнительно содержит...
Пристрій для лічіння предметів, що рухаються
Номер патенту: 4082
Опубліковано: 27.12.1994
Автори: Садкін Вечеслав Валерійович, Сидоренко Микола Федорович, Уманчик Микола Іванович, Панов Віктор Михайлович
МПК: G06M 7/00
Мітки: лічіння, рухаються, предметів, пристрій
Формула / Реферат:
Устройство для счета движущихся предметов, содержащее первый и второй датчики, установленные по ходу движения предметов на расстоянии друг от друга, меньшем длины предметов, первый и второй триггеры, первые входы которых подключены к выходу первого датчика, выход второго датчика соединен со вторым входом второго триггера, выход которого подключен ко входу счетчика, отличающееся тем, что выход второго датчика соединен со вторым входом первого...
Попередній патент: Спосіб одержання препарата для профілактики і лікування шлунково-кишкових захворювань сільськогосподарських тварин
Наступний патент: Пристрій для автоматичної адресації об’єктів, котрі рухаються
Випадковий патент: Спосіб одержання комплексу полісахаридів з мембраностабілізуючою та імуномоделюючою дією