Спосіб керування намотувальним механізмом для намотування на котушку різних матеріалів
Номер патенту: 61400
Опубліковано: 25.07.2011
Автори: Тищенко Микола Тарасович, Мягков Ігор Володимирович, Рогов Олександр Олександрович, Садовой Олександр Валентинович, Гриценко Андрій Петрович
Формула / Реферат
Спосіб керування намотувальним механізмом для намотування на котушку різних матеріалів, що включає регулюючий вплив на обертовий рух згаданої котушки, а також на поступальне переміщення рухомих основ під опорами намотувального механізму, який відрізняється тим, що за рахунок безперервного контролю поточних параметрів роботи намотувального механізму - лінійної швидкості матеріалу в процесі його намотування на котушку, поточного діаметра котушки, довжини котушки, лінійного розміру поперечного перерізу намотуваного матеріалу, відстані від краю котушки до крайнього витка, моменту реверсу каналу керування переміщенням рухомих основ під опорами намотувального механізму - створюють вимірювально-обчислювальний комплекс і спрямовують його функції на виконання алгоритму керування намотувальним механізмом.
Текст
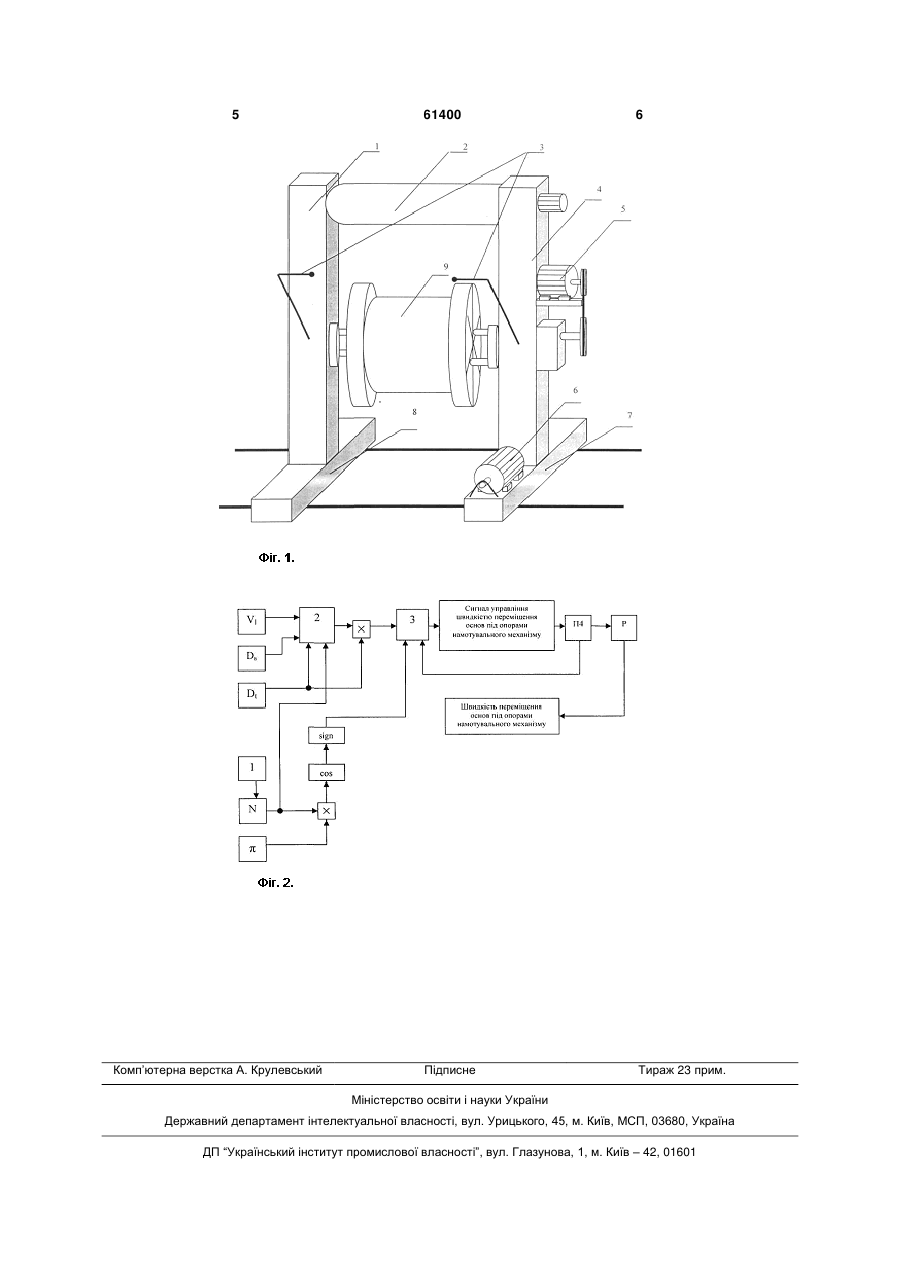
Спосіб керування намотувальним механізмом для намотування на котушку різних матеріалів, що включає регулюючий вплив на обертовий рух згаданої котушки, а також на поступальне перемі 3 вимірювально-обчислювальний комплекс, завдяки якому виникла можливість усунути недоліки, властиві прототипу. 2. Створення вимірювально-обчислювального комплексу вирішило провідні завдання, які визначають безперебійну і якісну роботу намотувального механізму: - передбачення моменту включення реверсу каналу керування переміщенням рухомих основ під опорами намотувального механізму; - забезпечення достовірно визначених дій при керуванні намотувальним механізмом, що значно покращило якість намотуваної на котушку продукції за рахунок виключення її деформації в процесі намотування. Функціональна схема намотувального механізму зображена на фіг. 1. Складовими частинами механізму є дві опори 1 і 4 на рухомих основах 7 і 8. Опори зв'язані між собою розсувним механізмом 2, призначеним для установки в функціональне положення котушки 9, яка приводиться в обертовий рух за допомогою електродвигуна 5 через пасову передачу. Рухомі основи 7 і 8 обладнані колісними парами, що переміщуються по двох спрямовуючих рейках і приводяться в рух за допомогою електродвигуна 6. Котушка обладнана двома вимірювальними пристроями 3, які забезпечують вимір параметра відстані від краю котушки до крайнього витка. Функціональна схема вимірювальнообчислювального комплексу зображена на фіг. 2. Параметри V1, Dв, Dt означають відповідно лінійну швидкість матеріалу в процесі його намотування, діаметр котушки, лінійний розмір поперечного перерізу намотувального матеріалу. Блоки П4, Р, Sign, cos - відповідно блок перетворення частоти, редуктор, блок визначення знаку сигналу (додатний, від'ємний) і блок добування косинуса. Блок 1 призначений для обробки сигналів від давачів наближення намотувального матеріалу до краю котушки. Блок N призначений для обчислення кількості шарів намотувального матеріалу, укладених на котушку. Блок 2 призначений для обчислення обертової швидкості котушки з урахуванням кількості укладених на ній шарів на 61400 4 мотувального матеріалу. За допомогою блока множення знаходять лінійну швидкість переміщення рухомих основ під опорами намотувального механізму. Кероване припинення процесу переміщення рухомих основ під опорами намотувального механізму проводять з урахуванням того, що сигнал від давача наближення намотувального матеріалу до краю котушки розрахований на один лінійний розмір поперечного перерізу намотувального матеріалу. До моменту повної зупинки намотувального механізму і відповідно до моменту початку реверсу намотувальний механізм повинен переміститися на один лінійний розмір поперечного перерізу намотувального матеріалу. При цьому розраховується прискорення, необхідне для зупинки намотувального механізму. Після досягнення швидкістю переміщення намотувального механізму нульового значення (сигнал перетворювача частоти) відбувається реверс, потім обчислення нової швидкості, що відповідає новому укладеному шару на котушці, і прискорення, необхідного для досягнення розрахованої швидкості. Блок 3 реалізує алгоритм керованої зупинки. Дослідно-промислові випробування запропонованого способу керування провели на промисловій установці для намотування на котушку алюмінієвої трубки, яку використовують для холодильних агрегатів. В процесі цих випробувань була доведена працездатність, надійність і висока ефективність згаданого способу керування. Зокрема, була досягнута головна мета, що характеризує надійність і якість роботи намотувального механізму - намотувана трубка знаходилась чітко на одній прямій лінії при відсутності будь-якого відхилення від неї в процесі роботи. Це сприяло повному виключенню деформації трубки при її укладанні на котушку. Завдяки впровадженню запропонованого способу в виробництво вдалось повністю виключити виробництво бракованої трубки в процесі її намотування на котушку. Це сприяло отриманню річного економічного ефекту в розрахунку на один намотувальний механізм в сумі 400-450 тис. гривень. 5 Комп’ютерна верстка А. Крулевський 61400 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl method for winding machine for sooling of various materials
Автори англійськоюTyschenko Mykola Tarasovych, Miahkov Ihor Volodymyrovych, Sadovoi Oleksandr Valentynovych, Rohov Oleksandr Oleksandrovych, Hrytsenko Andrii Petrovych
Назва патенту російськоюСпособ управления намоточным механизмом для намотки на катушку различных материалов
Автори російськоюТищенко Николай Тарасович, Мягков Игорь Владимирович, Садовой Александр Валентинович, Рогов Александр Александрович, Гриценко Андрей Петрович
МПК / Мітки
МПК: G05B 19/045
Мітки: котушку, матеріалів, намотування, керування, намотувальним, різних, спосіб, механізмом
Код посилання
<a href="https://ua.patents.su/3-61400-sposib-keruvannya-namotuvalnim-mekhanizmom-dlya-namotuvannya-na-kotushku-riznikh-materialiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування намотувальним механізмом для намотування на котушку різних матеріалів</a>
Вузол намотування для намотування композитної стрічки на котушку з втулкою (варіанти), пристрій для намотування стрічки та спосіб намотування композитної стрічки на котушку з втулкою
Номер патенту: 94444
Опубліковано: 10.05.2011
Автори: Грайфорд Аленн, Бейтмен Аян Роджер, Меймен Крейґ Ентоні
МПК: B29C 53/00, B21C 47/06
Мітки: варіанти, пристрій, вузол, стрічки, котушку, втулкою, композитної, намотування, спосіб
Формула / Реферат:
1. Вузол намотування для намотування композитної стрічки на котушку з втулкою, в якому композитна стрічка має: пластичну стрічку, що розтягується, яка має плоску основу і сукупність окремих бічних буртиків, розташованих уздовж і розміщених на основі, і сукупність підсилюючих деталей, що розтягуються, розміщених уздовж у відповідних буртиках, буртики і підсилюючі деталі утворюють композитні буртики, до складу вузла для намотування котушки...
Спосіб спрямовування на заправку розірваного волокна для намотування на котушку
Номер патенту: 46789
Опубліковано: 17.06.2002
Автори: Хлудзінскі Пол Ендрю, Кімбалл Рональд Л., Бейкон Крістофер Дж., Гоук Дуейн Е., Робертс Кеннет Вільям, Бамгарнер Кірк Паттон
МПК: B65H 54/02
Мітки: котушку, заправку, намотування, спосіб, спрямовування, розірваного, волокна
Формула / Реферат:
1. Спосіб спрямовування на заправку розірваного волокна для намотування на котушку, який полягає в тому, що волокно захоплюють захоплюючим пристроєм, який розташовують у положенні, в якому захоплюючий пристрій автоматично захоплює волокно, що надходить від постачального пристрою після розриву волокна, встановлюють контакт з волокном на ділянці між постачальним пристроєм і захоплюючим пристроєм за допомогою контактуючої частини спрямовуючого...
Спосіб порядного укладання порошкового дроту на котушку намотувального пристрою
Номер патенту: 35961
Опубліковано: 16.04.2001
Автори: Кочевенко Іван Іванович, Бордюгов Вячеслав Миколаєвич, Литвинов Віктор Іванович, Горовий Олександр Борисович, Тітієвський Володимир Маркович, Підгорний Ігор Вікторович
МПК: B21C 47/02
Мітки: укладання, намотувального, дроту, пристрою, порошкового, котушку, спосіб, порядного
Формула / Реферат:
Спосіб порядного укладення порошкового дроту на котушку намотувального пристрою, що включає в себе супроводження виткоукладальником порошкового дроту від однієї щоки котушки до другої зі швидкістю V = d * f, зупинку і реверс виткоукладальника, який відрізняється тим, що перед намоткою кожної бухти вимірюють діаметр дроту, а супроводження дроту зі швидкістю V проводять протягом укладання в кожному ряді N+0,5 витка і з V=Q...
Пристрій дистанційного керування механізмами для намотування і розмотування троса скреперної лебідки
Номер патенту: 33851
Опубліковано: 10.07.2008
Автори: Митрофанов Сергій Миколайович, Неруш Микола Миколайович
Мітки: пристрій, троса, розмотування, скреперної, дистанційного, керування, намотування, лебідки, механізмами
Формула / Реферат:
1. Пристрій дистанційного керування механізмом для намотування і розмотування троса скреперної лебідки, що містить розміщену в корпусі гідророзподільну систему з дистанційним пультом керування, механізм для намотування і розмотування троса скреперної лебідки, що містить гальмівні барабани з гальмівними стрічками, кінематично з'єднаними з виконавчим механізмом, який відрізняється тим, що виконавчий механізм виконаний у вигляді...
Верстат для спірального намотування виробів з композиційних матеріалів
Номер патенту: 70150
Опубліковано: 15.09.2004
Автори: Желтов Павло Миколайович, Заворітько Іван Євсійович, Малий Микола Андрійович, Семенов Лев Петрович
МПК: B29D 23/00, B29C 53/00
Мітки: виробів, матеріалів, спірального, композиційних, верстат, намотування
Формула / Реферат:
Верстат для спірального намотування виробів з композиційних матеріалів, що містить станину, оправку, яка оперта на шпиндельну та задню бабки, супорт з рухомим у поперечному напрямі до осі оправки столом, на якому розміщені просочувально-формуючий тракт та розкладаючий ролик, шпулярник, блок програмного управління, який забезпечує синхронізацію усіх рухів, який відрізняється тим, що супорт та шпулярник встановлені стаціонарно, а шпиндельна та...