Магнітна стереотаксична система
Номер патенту: 62500
Опубліковано: 15.02.2006
Автори: Семенець Валерій Васильович, Аврунін Олег Григорович
Формула / Реферат
Зонд, що містить робочий кінець, пружинне кільце, ручку, який відрізняється тим, що на пружинному кільці є виступи.
Текст
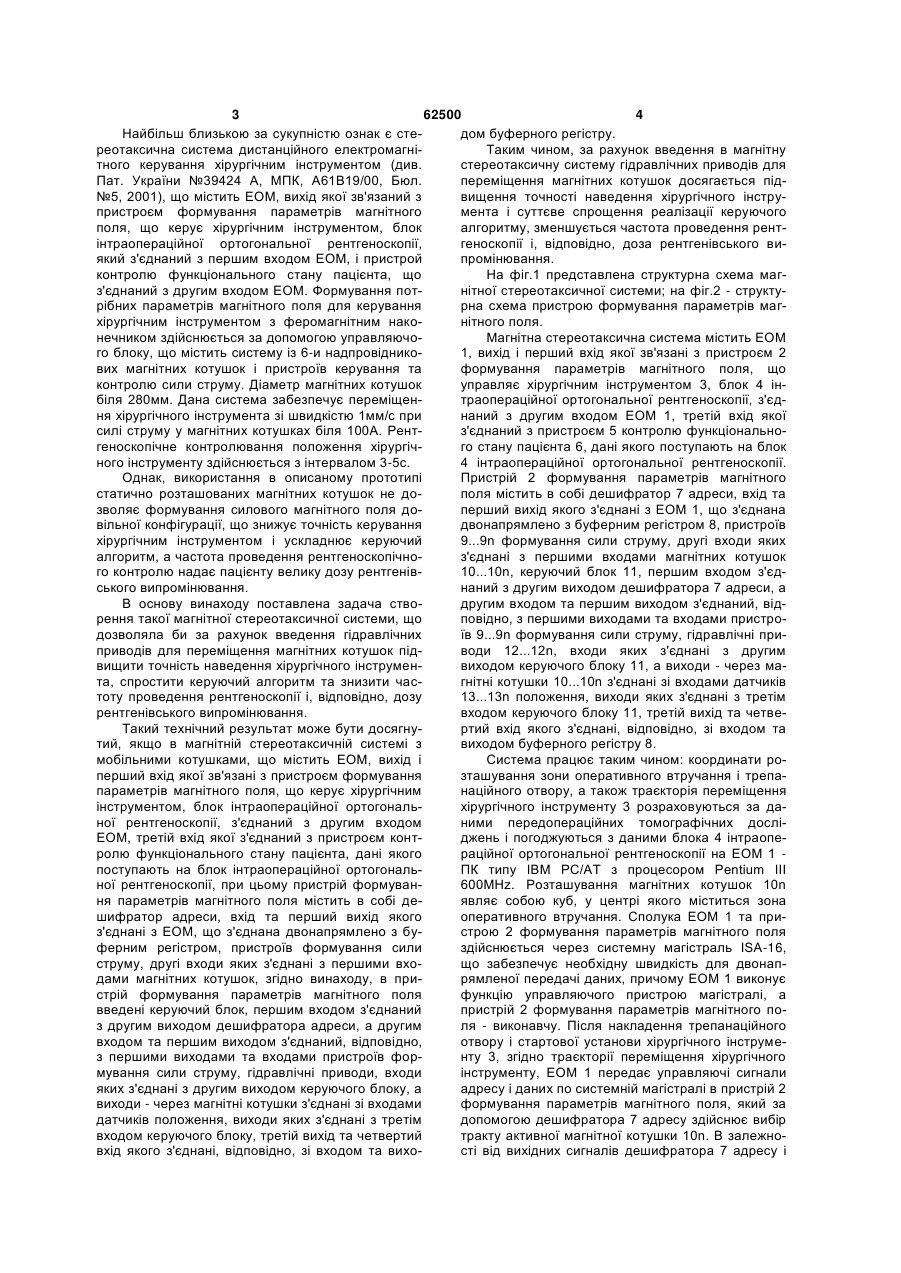
Магнітна стереотаксична система, що містить ЕОМ, вихід і перший вхід якої зв'язані з пристроєм формування параметрів магнітного поля, що керує хірургічним інструментом, блок інтраопераційної ортогональної рентгеноскопії, з'єднаний з другим входом ЕОМ, третій вхід якої з'єднаний з пристроєм контролю функціонального стану пацієнта, дані C2 1 3 62500 4 Найбільш близькою за сукупністю ознак є стедом буферного регістру. реотаксична система дистанційного електромагніТаким чином, за рахунок введення в магнітну тного керування хірургічним інструментом (див. стереотаксичну систему гідравлічних приводів для Пат. України №39424 А, МПК, А61В19/00, Бюл. переміщення магнітних котушок досягається під№5, 2001), що містить ЕОМ, вихід якої зв'язаний з вищення точності наведення хірургічного інструпристроєм формування параметрів магнітного мента і суттєве спрощення реалізації керуючого поля, що керує хірургічним інструментом, блок алгоритму, зменшується частота проведення рентінтраопераційної ортогональної рентгеноскопії, геноскопії і, відповідно, доза рентгенівського виякий з'єднаний з першим входом ЕОМ, і пристрой промінювання. контролю функціонального стану пацієнта, що На фіг.1 представлена структурна схема магз'єднаний з другим входом ЕОМ. Формування потнітної стереотаксичної системи; на фіг.2 - структурібних параметрів магнітного поля для керування рна схема пристрою формування параметрів магхірургічним інструментом з феромагнітним наконітного поля. нечником здійснюється за допомогою управляючоМагнітна стереотаксична система містить ЕОМ го блоку, що містить систему із 6-и надпровіднико1, вихід і перший вхід якої зв'язані з пристроєм 2 вих магнітних котушок і пристроїв керування та формування параметрів магнітного поля, що контролю сили струму. Діаметр магнітних котушок управляє хірургічним інструментом 3, блок 4 інбіля 280мм. Дана система забезпечує переміщентраопераційної ортогональної рентгеноскопії, з'єдня хірургічного інструмента зі швидкістю 1мм/с при наний з другим входом ЕОМ 1, третій вхід якої силі струму у магнітних котушках біля 100А. Рентз'єднаний з пристроєм 5 контролю функціональногеноскопічне контролювання положення хірургічго стану пацієнта 6, дані якого поступають на блок ного інструменту здійснюється з інтервалом 3-5с. 4 інтраопераційної ортогональної рентгеноскопії. Однак, використання в описаному прототипі Пристрій 2 формування параметрів магнітного статично розташованих магнітних котушок не дополя містить в собі дешифратор 7 адреси, вхід та зволяє формування силового магнітного поля доперший вихід якого з'єднані з ЕОМ 1, що з'єднана вільної конфігурації, що знижує точність керування двонапрямлено з буферним регістром 8, пристроїв хірургічним інструментом і ускладнює керуючий 9...9n формування сили струму, другі входи яких алгоритм, а частота проведення рентгеноскопічноз'єднані з першими входами магнітних котушок го контролю надає пацієнту велику дозу рентгенів10...10n, керуючий блок 11, першим входом з'єдського випромінювання. наний з другим виходом дешифратора 7 адреси, а В основу винаходу поставлена задача стводругим входом та першим виходом з'єднаний, відрення такої магнітної стереотаксичної системи, що повідно, з першими виходами та входами пристродозволяла би за рахунок введення гідравлічних їв 9...9n формування сили струму, гідравлічні приприводів для переміщення магнітних котушок підводи 12...12n, входи яких з'єднані з другим вищити точність наведення хірургічного інструменвиходом керуючого блоку 11, а виходи - через мата, спростити керуючий алгоритм та знизити часгнітні котушки 10...10n з'єднані зі входами датчиків тоту проведення рентгеноскопії і, відповідно, дозу 13...13n положення, виходи яких з'єднані з третім рентгенівського випромінювання. входом керуючого блоку 11, третій вихід та четвеТакий технічний результат може бути досягнуртий вхід якого з'єднані, відповідно, зі входом та тий, якщо в магнітній стереотаксичній системі з виходом буферного регістру 8. мобільними котушками, що містить ЕОМ, вихід і Система працює таким чином: координати роперший вхід якої зв'язані з пристроєм формування зташування зони оперативного втручання і трепапараметрів магнітного поля, що керує хірургічним наційного отвору, а також траєкторія переміщення інструментом, блок інтраопераційної ортогональхірургічного інструменту 3 розраховуються за даної рентгеноскопії, з'єднаний з другим входом ними передопераційних томографічних досліЕОМ, третій вхід якої з'єднаний з пристроєм контджень і погоджуються з даними блока 4 інтраоперолю функціонального стану пацієнта, дані якого раційної ортогональної рентгеноскопії на ЕОМ 1 поступають на блок інтраопераційної ортогональПК типу IBM PC/AT з процесором Pentium III ної рентгеноскопії, при цьому пристрій формуван600MHz. Розташування магнітних котушок 10n ня параметрів магнітного поля містить в собі деявляє собою куб, у центрі якого міститься зона шифратор адреси, вхід та перший вихід якого оперативного втручання. Сполука ЕОМ 1 та приз'єднані з ЕОМ, що з'єднана двонапрямлено з бустрою 2 формування параметрів магнітного поля ферним регістром, пристроїв формування сили здійснюється через системну магістраль ISA-16, струму, другі входи яких з'єднані з першими вхощо забезпечує необхідну швидкість для двонапдами магнітних котушок, згідно винаходу, в прирямленої передачі даних, причому ЕОМ 1 виконує стрій формування параметрів магнітного поля функцію управляючого пристрою магістралі, а введені керуючий блок, першим входом з'єднаний пристрій 2 формування параметрів магнітного поз другим виходом дешифратора адреси, а другим ля - виконавчу. Після накладення трепанаційного входом та першим виходом з'єднаний, відповідно, отвору і стартової установи хірургічного інструмез першими виходами та входами пристроїв форнту 3, згідно траєкторії переміщення хірургічного мування сили струму, гідравлічні приводи, входи інструменту, ЕОМ 1 передає управляючі сигнали яких з'єднані з другим виходом керуючого блоку, а адресу і даних по системній магістралі в пристрій 2 виходи - через магнітні котушки з'єднані зі входами формування параметрів магнітного поля, який за датчиків положення, виходи яких з'єднані з третім допомогою дешифратора 7 адресу здійснює вибір входом керуючого блоку, третій вихід та четвертий тракту активної магнітної котушки 10n. В залежновхід якого з'єднані, відповідно, зі входом та вихості від вихідних сигналів дешифратора 7 адресу і 5 62500 6 даних з буферного регістру 8 керуючий блок 11 неву із розривами у контрольних точках. Рух хірурподає управляючі впливи на пристрої 9n формугічного інструмента 3 вздовж кожної із просторових вання сили струму у магнітних котушках 10n і гідкоординат забезпечується однією із магнітних коравлічні приводи 12n. Також в керуючий блок постушок 10n, при цьому швидкість визначається ветупають вихідні контрольні сигнали із пристроїв 9n личиною сили струму у обмотці, а за допомогою формування сили струму та датчиків 13n полопереміщення котушок 10n виконується оптимальження магнітних котушок 10n, які через буферний ний (за відсутністю радіальних пондеромоторних регістр 8 передаються до ЕОМ 1. Гідравлічні присил) вибір робочої області. При реалізації такої води 12n за командами із керуючого блоку 11 видискретної траєкторії рентгенологічний контроль конують незалежне поступове переміщення магніпозиціювання хірургічного інструменту проводитьтних котушок 10n, які закріплені на штоках ся у загальних контрольних точках приблизно чевідповідних гідравлічних циліндрів. Алгоритм керурез 10с. вання перетворює аналогову траєкторію в ступе Комп’ютерна верстка M. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetic stereotaxic system
Автори англійськоюAvrunin Oleh Hryhorovych, Semenets Valerii Vasyliovych
Назва патенту російськоюМагнитная стереотаксическая система
Автори російськоюАврунин Олег Григорьевич, Семенец Валерий Васильевич
МПК / Мітки
МПК: A61B 19/00
Мітки: система, стереотаксична, магнітна
Код посилання
<a href="https://ua.patents.su/3-62500-magnitna-stereotaksichna-sistema.html" target="_blank" rel="follow" title="База патентів України">Магнітна стереотаксична система</a>
Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом
Номер патенту: 39424
Опубліковано: 15.06.2001
Автори: Аврунін Олег Григорович, П'ятикоп Володимир Олександрович, Масловський Сергій Юрьович, Семенець Валерій Васильович
МПК: A61B 19/00
Мітки: стереотаксична, система, електромагнітного, хірургічним, управління, інструментом, дистанційного
Формула / Реферат:
Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом, що містить ЕОМ, вихід якої зв'язан з пристроєм формування параметрів магнітного поля, що управляє хірургічним інструментом, блок інтраопераційної ортогональної рентгеноскопії, з'єднаний з першим входом ЕОМ і пристрій контроля функціонального стану пацієнта, з'єднаний з другим входом ЕОМ, яка відрізняється тим, що пристрій формування параметрів...
Магнітна система барабанного сепаратора
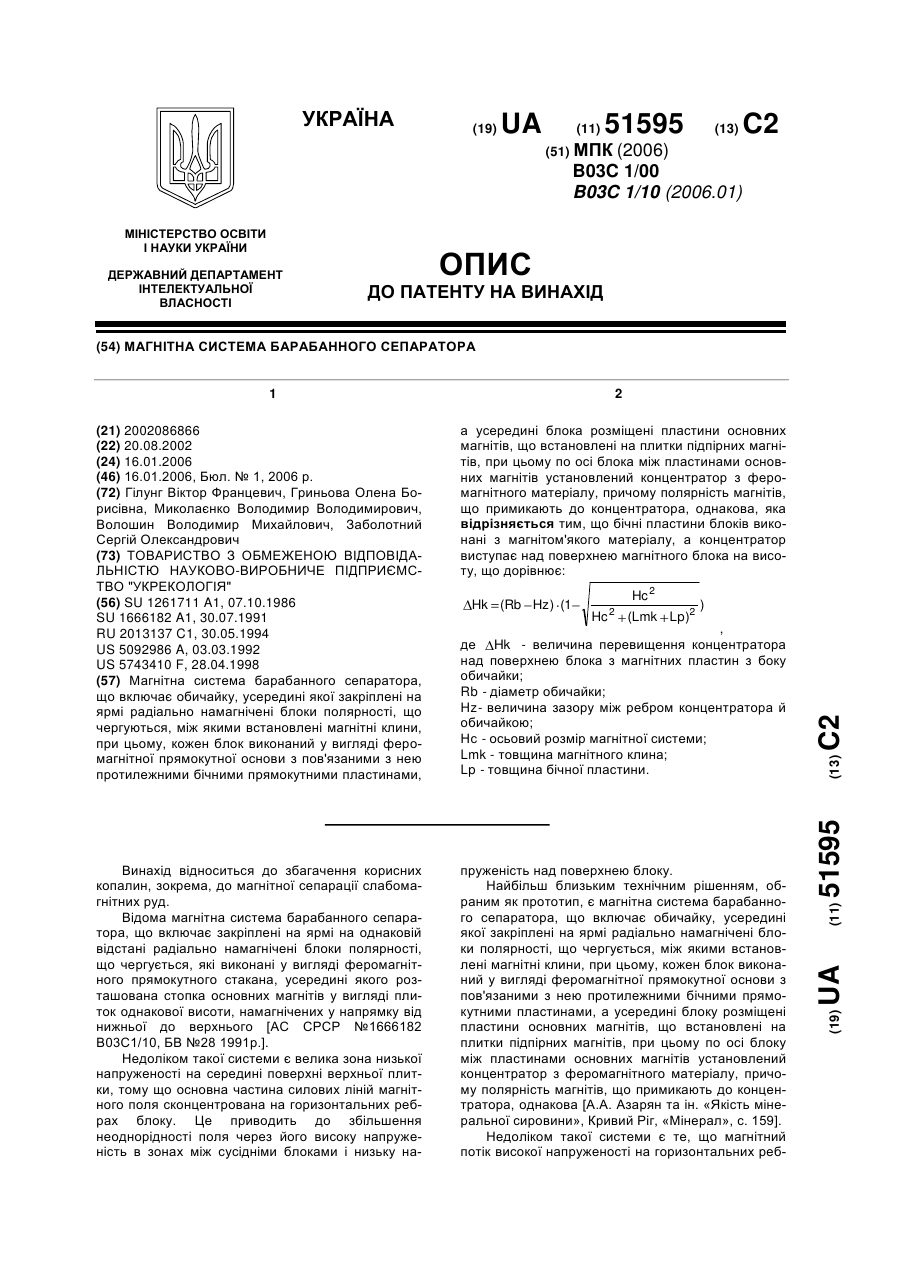
Номер патенту: 51595
Опубліковано: 16.01.2006
Автори: Заболотний Сергій Олександрович, Гриньова Олена Борисівна, Миколаєнко Володимир Володимирович, Гілунг Віктор Францевич, ВОЛОШИН ВОЛОДИМИР МИХАЙЛОВИЧ
Мітки: сепаратора, система, магнітна, барабанного
Формула / Реферат:
Підп'ятник, що містить опорні елементи з робочими поверхнями, один з яких нерухомий, а другий встановлено з можливістю обертання відносно своєї осі, який відрізняється тим, що додатково обладнаний тілом кочення, виконаним у вигляді кульки, при цьому робоча поверхня кожного опорного елемента містить сферичну канавку, осі сферичних канавок співпадають з осями опорних елементів, а кулька розташована між опорними елементами в сферичних...
Магнітна система сепаратора
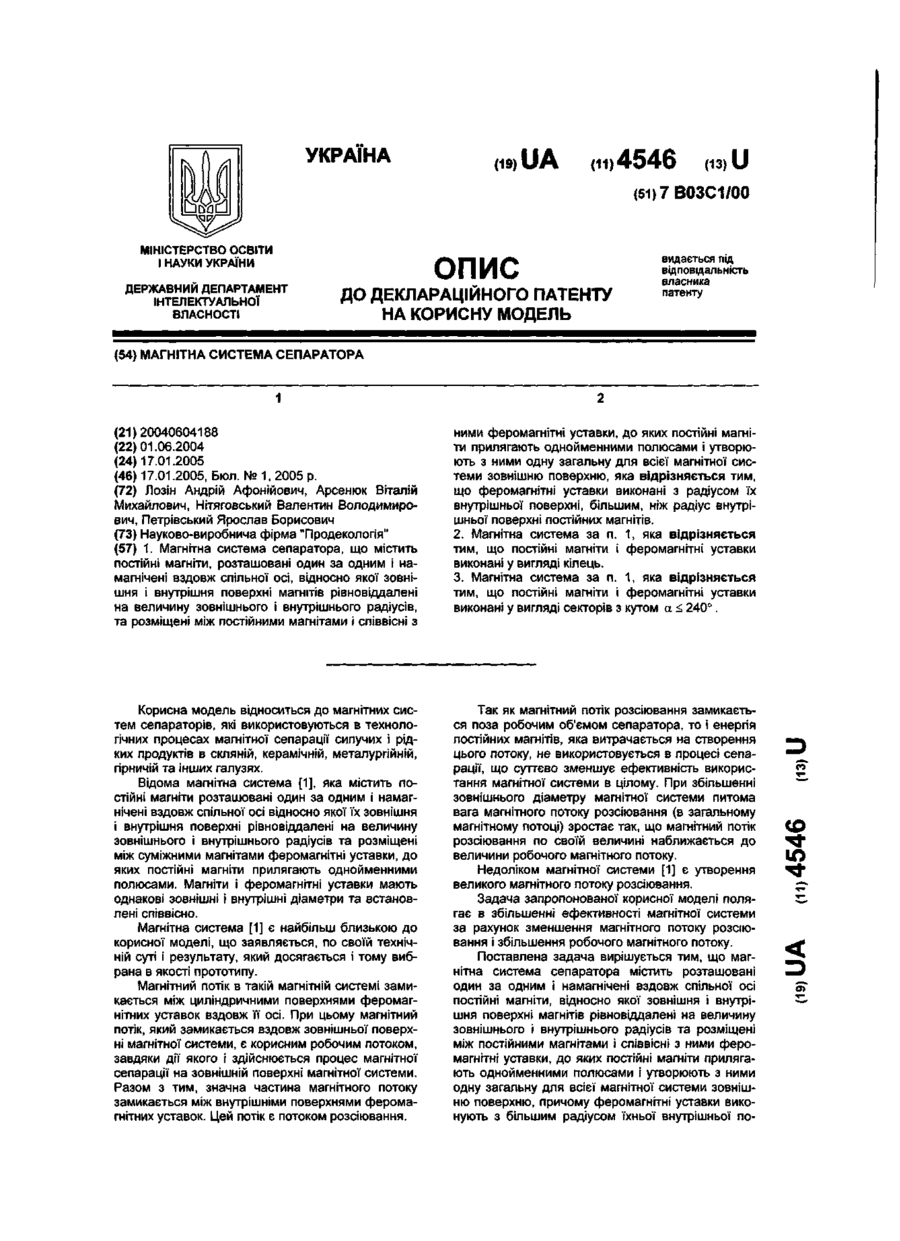
Номер патенту: 4546
Опубліковано: 17.01.2005
Автори: Петрівський Ярослав Борисович, Нітяговський Валентин Володимирович, Лозін Андрій Афонійович, Арсенюк Віталій Михайлович
МПК: B03C 1/00
Мітки: сепаратора, система, магнітна
Формула / Реферат:
1. Магнітна система сепаратора, що містить постійні магніти, розташовані один за одним і намагнічені вздовж спільної осі, відносно якої зовнішня і внутрішня поверхні магнітів рівновіддалені на величину зовнішнього і внутрішнього радіусів, та розміщені між постійними магнітами і співвісні з ними феромагнітні уставки, до яких постійні магніти прилягають однойменними полюсами і утворюють з ними одну загальну для всієї магнітної системи зовнішню...
Магнітна система магнетронного розпилювального пристрою
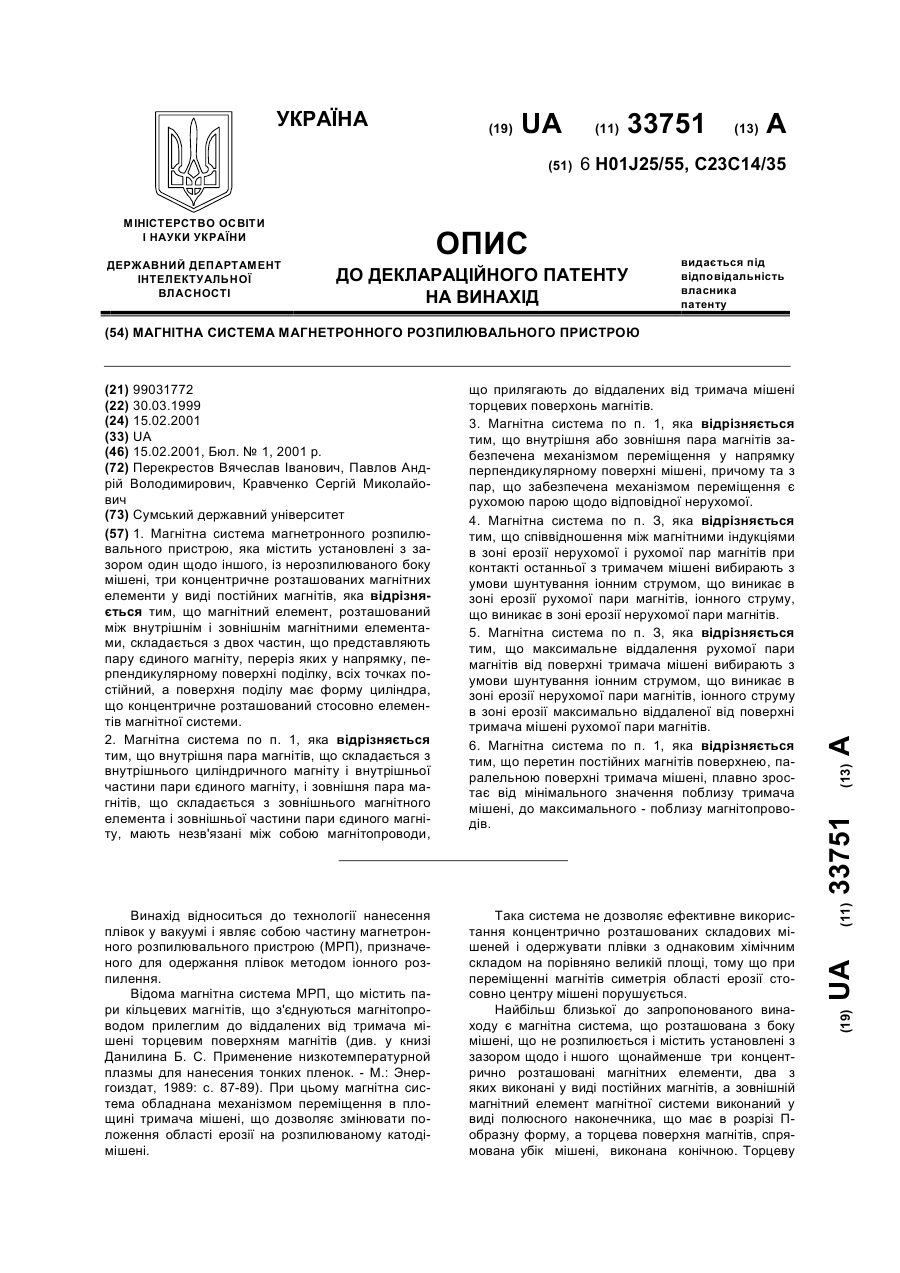
Номер патенту: 33751
Опубліковано: 15.02.2001
Автори: Павлов Андрій Володимирович, Перекрестов В'ячеслав Іванович, Кравченко Сергій Миколайович
МПК: H01J 25/00, C23C 14/35
Мітки: магнетронного, пристрою, розпилювального, система, магнітна
Текст:
...наступним. Рухома і нерухома пари магнітів створюють поблизу поверхні мішені, що розпилюється, магнітну індукцію, що паралельна поверхні мішені і перпендикулярна вектору напруженості електричного поля. Електрони, що знаходяться в цій області, рухаються по циклоїді поблизу поверхні мішені, і іонізують залишкові гази. Прискорені електричним полем іони бомбардують і при цьому розпилюють мішень. Більш високі значення індукції магнітного поля...
Гвинтова тороїдальна магнітна система
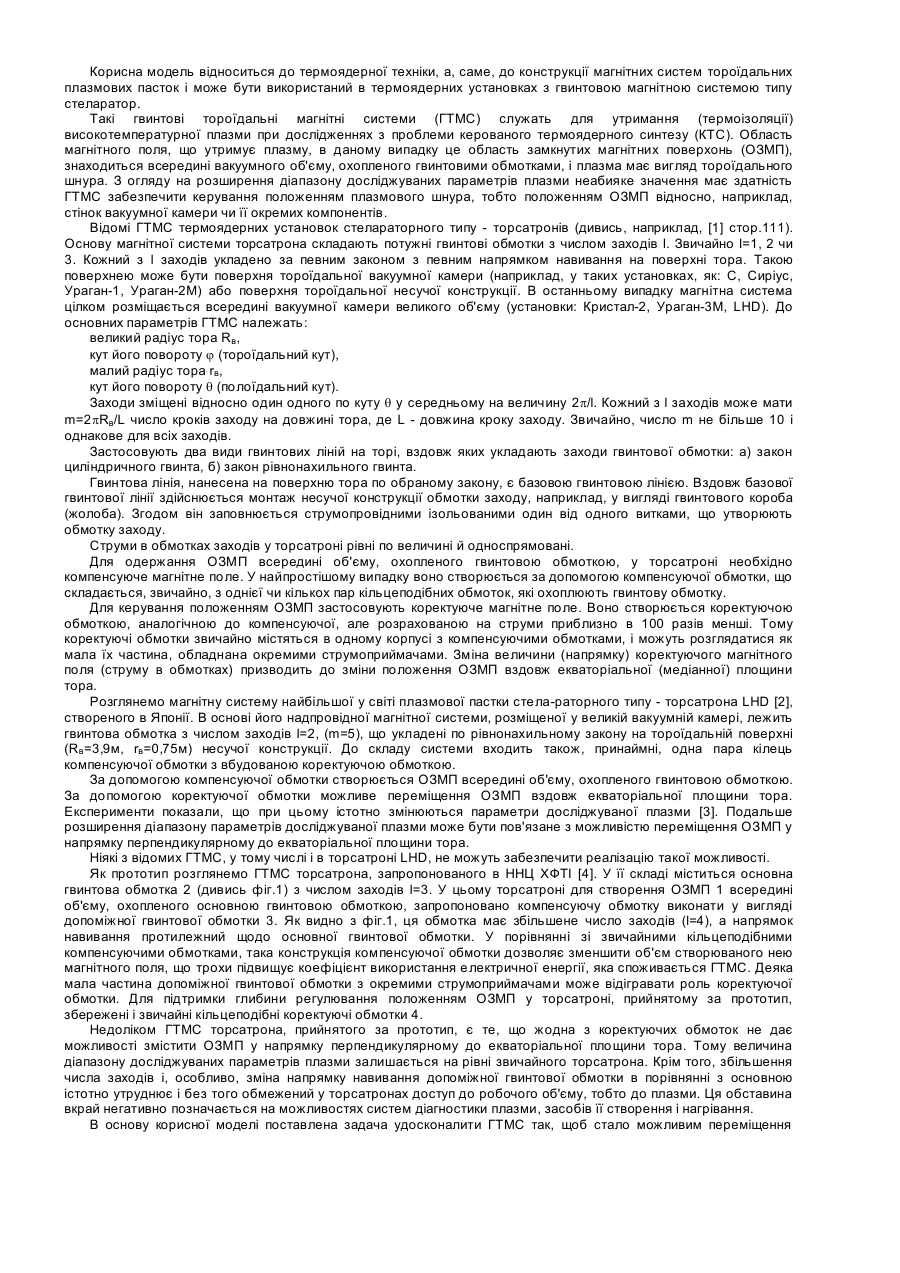
Номер патенту: 3094
Опубліковано: 15.10.2004
Автори: Сергєєв Юрій Федорович, Курило Дмитро Васильович, Котенко Володимир Григорович, Смирнов Володимир Георгійович
МПК: H05H 1/02
Мітки: система, гвинтова, тороїдальна, магнітна
Формула / Реферат:
Гвинтова тороїдальна магнітна система, що містить основну гвинтову одно- або багатозахідну обмотку, кожний захід якої укладений на поверхні тора вздовж основної базової гвинтової лінії, та допоміжну гвинтову обмотку, яка відрізняється тим, що кожному із заходів основної гвинтової обмотки відповідає один захід допоміжної гвинтової обмотки, укладений на поверхні тора вздовж допоміжної базової гвинтової лінії, будь-яка точка якої віддалена на...
Попередній патент: Пристрій для упаковування продуктів у пакети з термосклейного матеріалу
Наступний патент: Пристрій для термостабілізації черв’яка екструдера
Випадковий патент: Плавуча атомна електростанція