Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом
Номер патенту: 39424
Опубліковано: 15.06.2001
Автори: П'ятикоп Володимир Олександрович, Аврунін Олег Григорович, Семенець Валерій Васильович, Масловський Сергій Юрьович
Формула / Реферат
Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом, що містить ЕОМ, вихід якої зв'язан з пристроєм формування параметрів магнітного поля, що управляє хірургічним інструментом, блок інтраопераційної ортогональної рентгеноскопії, з'єднаний з першим входом ЕОМ і пристрій контроля функціонального стану пацієнта, з'єднаний з другим входом ЕОМ, яка відрізняється тим, що пристрій формування параметрів магнітного поля містить в собі дешифратор адресу, вхід та перший вихід якого з'єднані з ЕОМ, а другий вихід з'єднан з другими входами цифро-аналогових пристроїв формування сили струму і аналого-цифрових амперметрів, перши входи яких, через відповідні магнітні котушки, з'єднані з виходами відповідних цифро-аналогових пристроїв формування сили струму, а виходи з'єднані з входом двонаправленого буферного регістру, що з'єднан двонаправленою шиною з ЕОМ, а вихід якого з'єднан з першими входами цифро-аналогових пристроїв формування сили струму, хірургічний інструмент має діаметр до 2 мм і наконечник сферичної форми.
Текст
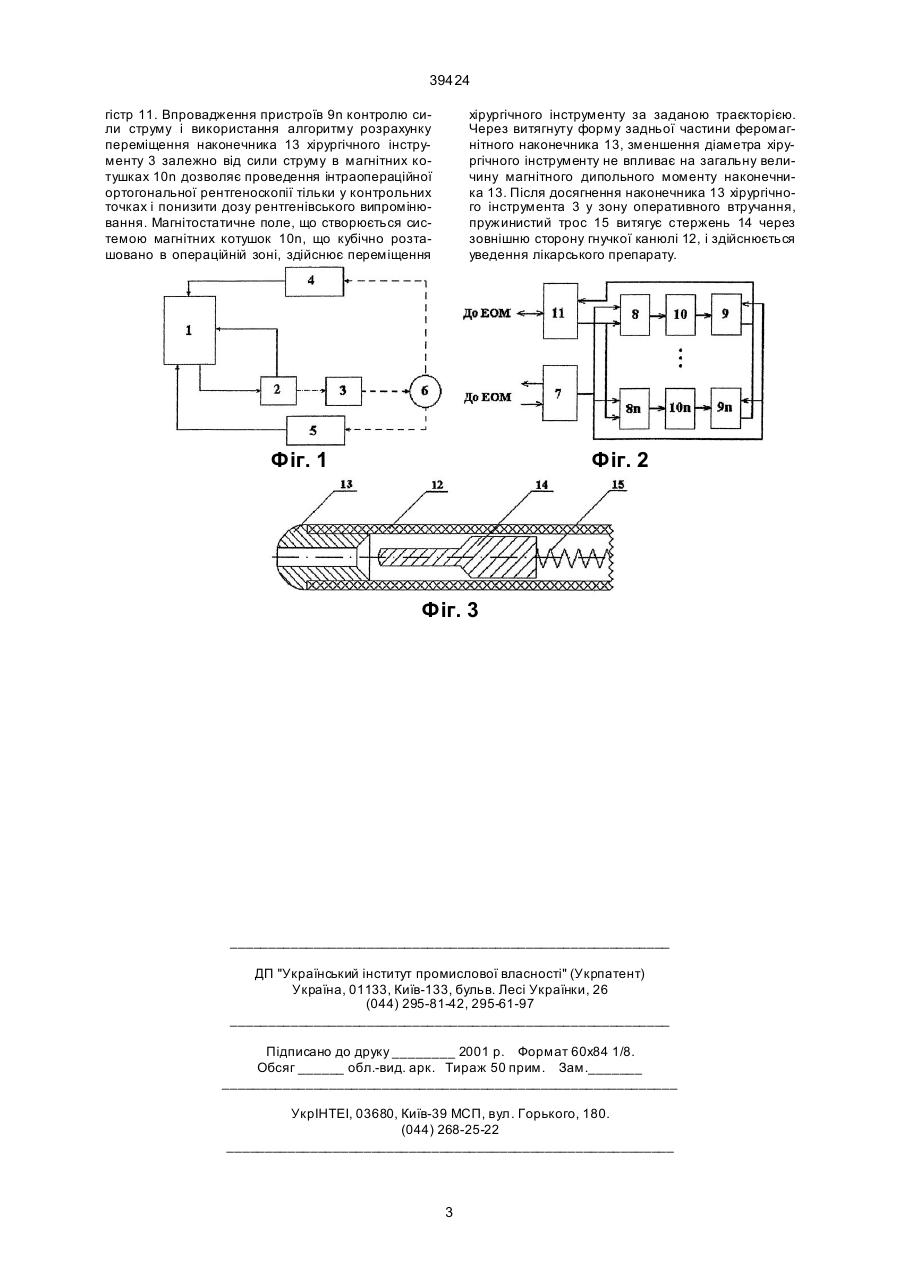
Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом, що містить ЕОМ, ви хід якої зв'язано з пристроєм формування параметрів магнітного поля, що управляє хірургічним інструментом, блок інтраопераційної ортогональної рентгеноскопії, з'єднаний з першим входом ЕОМ і пристрій контролю 39424 Формування потрібних параметрів магнітного поля для управління хірургічним інструментом з феромагнітним наконечником - круговим циліндром з діаметром 3 мм та висотою 3 мм, що розташовано у загостреному пластиковому кожусі, здійснюється за допомогою багатоканальної системи з 6-ти магнітних котушок, що виконали з над провід-никового матеріалу. Діаметр магнітних котушок біля 280 мм. Дана система забезпечує переміщення хірургічного інструмента зі швидкістю 1 мм/с при силі струму у магнітних котушках біля 100 А. Рентгеноскопічне інтраопераційне контролювання здійснюється з інтервалом 1 с. Однак в описаному прототипі хірургічний інструмент має завеликий діаметр і для зменшення сили тертя виконаний з загостреним пластиковим наконечником, що є потенційно небезпечно при переміщенні по глибинних структурах головного мозку, а частота проведення рентгеноскопічного контролю надає пацієнту велику дозу рентгенівського випромінювання. В основу винаходу поставлена задача створення такої стереотаксичної системи дистанційного електромагнітного управління хірургічним інструментом, що дозволяла б за рахунок зміни конфігурації хірургічного інструменту, зменшити загальну інвазивність оперативного втручання і виключити ризик внутрішньомозкових крововиливів. Через впровадження пристроїв контролю сили струму у магнітних котушках, знизити частоту проведення рентгеноскопії і, відповідно, дозу рентгенівського випромінювання. Такий технічний результат може бути досягнутий, якщо в стереотаксичній системі дистанційного електромагнітного управління хірургічним інструментом, що містить ЕОМ, ви хід якої зв'язано з пристроєм формування параметрів магнітного поля, що управляє хірургічним інструментом, блок інтраопераційної ортогональної рентгеноскопії, з'єднаний з першим входом ЕОМ і пристрій контролю функціонального стану пацієнта, з'єднаний з другим входом ЕОМ, згідно з винаходом, пристрій формування параметрів магнітного поля містить в собі дешифратор адресу, вхід та перший ви хід якого з'єднаний з ЕОМ, а другий вихід з'єднано з другими входами цифро-аналогових пристроїв формування сили струму і аналого-цифрових амперметрів, перши входи яких, через відповідні магнітні котушки, з'єднано з виходами відповідних цифро-аналогових пристроїв формування сили струму, а виходи з'єднали з входом двонаправленого буферного регістру, що з'єднано двонаправленою шиною з ЕОМ, а вихід якого з'єднано з першими входами цифро-аналогових пристроїв формування сили струму, хір ургічний інструмент має діаметр до 2 мм і наконечник сферичної форми. Таким чином, зменшення діаметру хірургічного інструменту до 2 мм, а також сферична форма наконечнику дозволяють знизити загальну інвазивність оперативного втручання і виключити ризик внутрішньомозкових крововиливів. А впровадження пристроїв контролю сили струму у магнітних котушках дозволяє понизити дозу рентгенівського випромінювання за рахунок зменшення частоти проведення інтраопераційної рентгеноскопії. На фіг. 1 представлена структурна схема стереотаксичної системи дистанційного електромагні тного управління хірургічним інструментом; на фіг. 2 - структурна схема пристрою формування параметрів магнітного поля; на фіг. 3 зображено поздовжній розріз передньої частини хірургічного інструменту. Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом містить ЕОМ 1, ви хід якої зв'язано з пристроєм 2 формування параметрів магнітного поля, що управляє хірургічним інструментом 3, блок 4 інтраопераційної ортогональної рентгеноскопії, з'єднаний з першим входом ЕОМ 1, пристрій 5 контролю функціонального стану пацієнта 6, з'єднаний з другим входом ЕОМ 1. Пристрій 2 формування параметрів магнітного поля містить в собі дешифратор 7 адресу, вхід та перший ви хід якого з'єднали з ЕОМ 1, а другий вихід з'єднай з другими входами цифро-аналогових пристроїв 8...8n формування сили струму і аналого-цифрових амперметрів 9...9n, перші входи яких через відповідні магнітні котушки 10...10n, з'єднано з виходами відповідних цифро-аналогових пристроїв 8...8n формування сили струму, а ви ходи з'єднано з входом двонаправленого буферного регістру 11, що з'єднано двонаправленою шиною з ЕОМ 1, а ви хід якого з'єднано з першими входами цифро-аналогових пристроїв 8...8n формування сили струму. Хір ургічний інструмент 3 (див. фіг. 3) являє собою гнучку канюлю 12 з діаметром до 2 мм і довжиною до 300 мм з сферичним феромагнітним наконечником 13, що має прохідний отвір, у якому розташовується парамагнітний стержень 14, з'єднаний з пружинистим тросом 15. Система працює таким чином. Координати розташування зони оперативного втручання і трепанаційного отвору, а також траєкторія переміщення хірургічного інструменту розраховуються за даними передопераційних гомографічних досліджень і погоджуються з даними інтраопераційної ортогональної рентгеноскопії 4 на ЕОМ 1 - ПК типу IBM PC/AT з процесором Pentium 200 MHz. Сполучення ЕОМ 1 та пристрою 2 формування параметрів магнітного поля здійснюється через системну магістраль ISA-16, що забезпечує необхідну швидкість для двонаправленої передачі даних, причому ЕОМ 1 - управляючий пристрій магістралі, а пристрій 2 формування параметрів магнітного поля виконавчий. Після накладення трепанаційного отвору і стартового позиціювання хірургічного інструменту 3, причому стержень 14 уводиться у наконечник 13 до упору, щоб запобігти забивання гнучкої канюлі 12 мозковою тканиною, згідно траєкторії переміщення хірургічного інструменту ЕОМ 1 передає управляючи сигнали адресу і даних по системній магістралі в пристрій 2 формування параметрів магнітного поля, який за допомогою дешифратора 7 адресу здійснює вибір тракту активної магнітної котушки 10n, до цифро-аналогового пристрою 8n формування сили струму якої, передаються дані з двонаправленого буферного регістру 11. Для контролю величин сили току у магнітних котушках 10n цикл обміну даних аналогічний, і лише відрізняється там, що після вибору за допомогою дешифратора 7 адресу тракту активної магнітної котушки 10n, аналого-цифровий амперметр 9n відповідної магнітної котушки 10n, передає дані до ЕОМ 1 через двонаправлений буферний ре 2 39424 гістр 11. Впровадження пристроїв 9n контролю сили струму і використання алгоритму розрахунку переміщення наконечника 13 хірургічного інструменту 3 залежно від сили струму в магнітних котушках 10n дозволяє проведення інтраопераційної ортогональної рентгеноскопії тільки у контрольних точках і понизити дозу рентгенівського випромінювання. Магнітостатичне поле, що створюється системою магнітних котушок 10n, що кубічно розташовано в операційній зоні, здійснює переміщення хірургічного інструменту за заданою траєкторією. Через витягнуту форму задньої частини феромагнітного наконечника 13, зменшення діаметра хірургічного інструменту не впливає на загальну величину магнітного дипольного моменту наконечника 13. Після досягнення наконечника 13 хірургічного інструмента 3 у зону оперативного втручання, пружинистий трос 15 витягує стержень 14 через зовнішню сторону гнучкої канюлі 12, і здійснюється уведення лікарського препарату. Фіг. 1 Фіг. 2 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюStereotaxic system for remote electromagnetic control of surgical instrument
Автори англійськоюAvrunin Oleh Hryhorovych, Semenets Valerii Vasyliovych, Maslovskyi Serhii Yuriiovych, Piatykop Volodymyr Oleksandrovych
Назва патенту російськоюСтереотаксическая система дистанционного электромагнитного управления хирургическим инструментом
Автори російськоюАврунин Олег Григорьевич, Семенец Валерий Васильевич, Масловский Сергей Юрьевич, Пятикоп Владимир Александрович
МПК / Мітки
МПК: A61B 19/00
Мітки: інструментом, управління, система, стереотаксична, дистанційного, електромагнітного, хірургічним
Код посилання
<a href="https://ua.patents.su/3-39424-stereotaksichna-sistema-distancijjnogo-elektromagnitnogo-upravlinnya-khirurgichnim-instrumentom.html" target="_blank" rel="follow" title="База патентів України">Стереотаксична система дистанційного електромагнітного управління хірургічним інструментом</a>
Система гідравлічного дистанційного управління вугледобувним агрегатом
Номер патенту: 13612
Опубліковано: 25.04.1997
Автори: Озерянський Генрих Йосипович, Савченко Анатолій Тихонович, Беккер Гарасим Харитонович, Риков Констянтин Михайлович
МПК: E21D 23/16
Мітки: вугледобувним, дистанційного, гідравлічного, управління, агрегатом, система
Формула / Реферат:
Система гидравлического дистанционного управления угледобывающим агрегатом, включающая гидролинии напора и слива, пульт управления, содержащий командное устройство, сообщенное гидролинией слива с одним и напора с другим его входами, выходами через распределители передвижки секций крепи, подачи базы и распора сообщен с гидростойками и гидродомкратами, отличающаяся тем, что, с целью повышения безопасности работы агрегата путем исключения...
Система дистанційного управління гірничими машинами
Номер патенту: 7577
Опубліковано: 29.09.1995
Автори: Сілаєв Віктор Іванович, Куришко Валерій Іванович, Діденко Володимир Вікторович, Лагунович Євген Федорович, Кириченко Борис Мефодієвич
МПК: E21C 35/24
Мітки: гірничими, система, машинами, управління, дистанційного
Формула / Реферат:
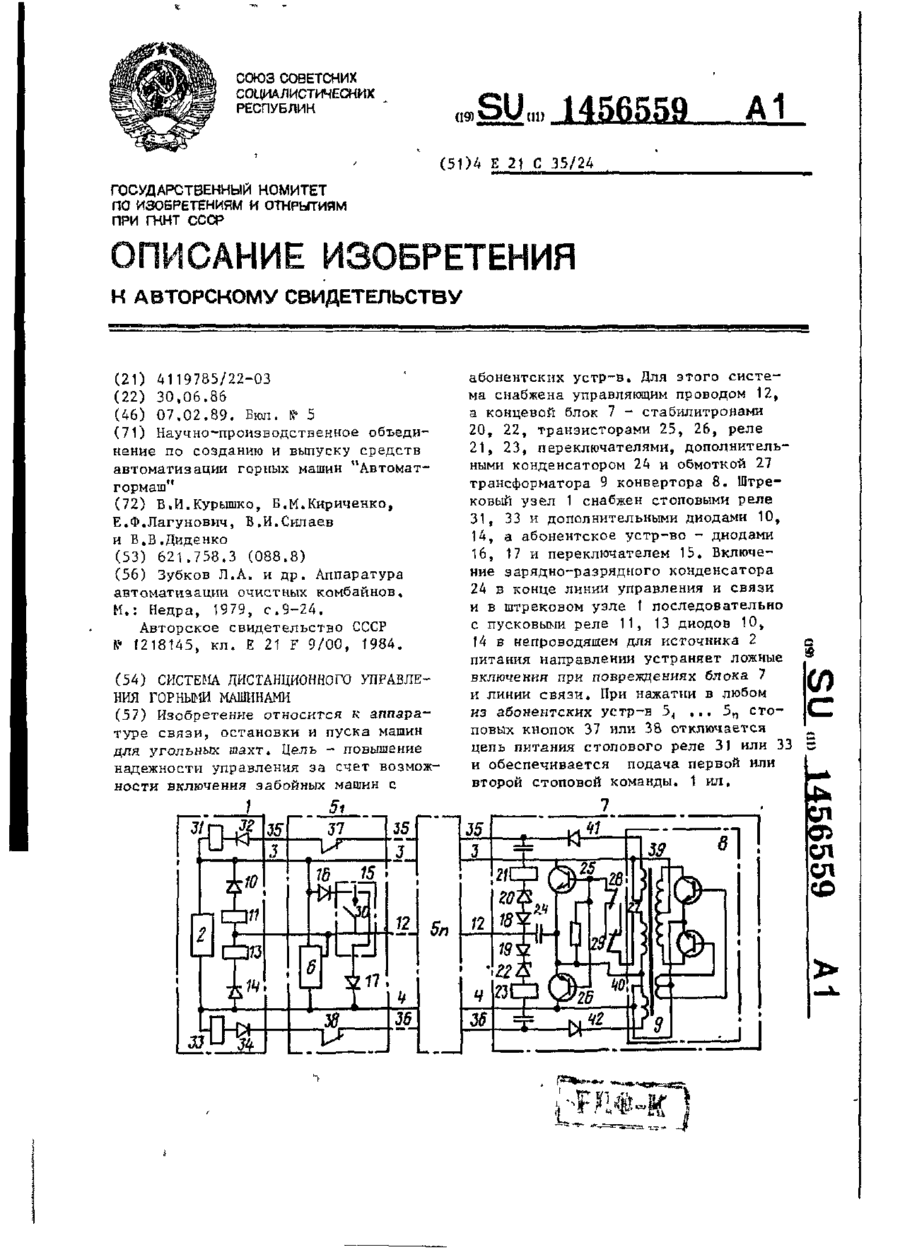
Система дистанционного управления горными машинами, содержащая штрековый узел, включающий источник питания, шины которого непосредственно соединены питающими проводами с блоком связи каждого абонентского устройства и с концевым блоком, содержащим конвертор с трансформатором, каждая вторичная обмотка которого одним концом подключена к соответствующему питающему проводу непосредственно и через разновключенные диоды к стоповому проводу,...
Система іскробезпечного електроживлення від мережі змінного струму схем дистанційного управління шахтної автоматики
Номер патенту: 7595
Опубліковано: 29.09.1995
Автори: Єфремов Олександр Петрович, Кириченко Борис Мефодієвич, Магілат Генадій Йосипович, Коваленко Наталія Іванівна
МПК: G05F 1/569
Мітки: змінного, автоматики, струму, шахтної, дистанційного, іскробезпечного, система, електроживлення, мережі, управління, схем
Формула / Реферат:
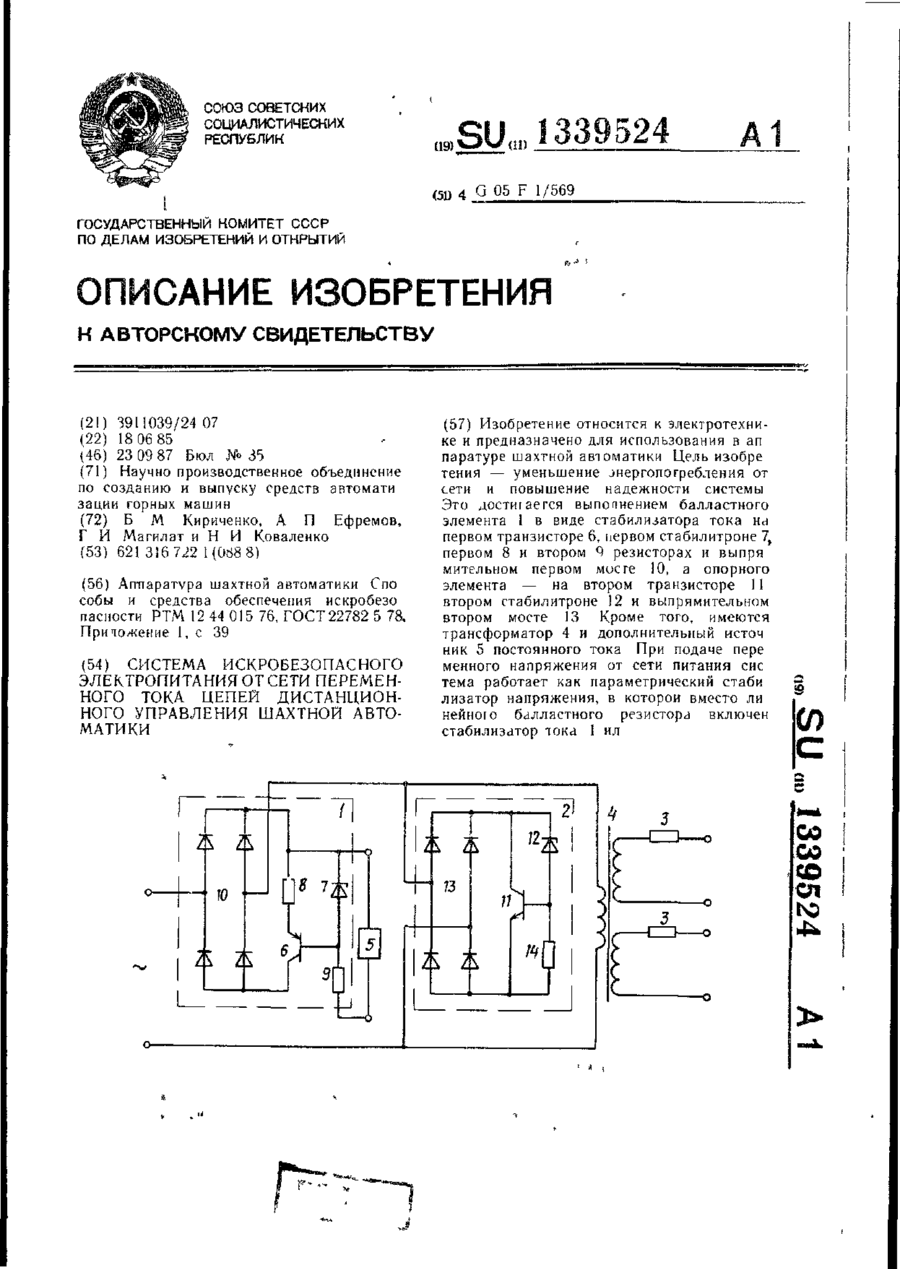
Система искробезопасного электропитания от сети переменного тока цепей дистанционного управления шахтной автоматики, содержащая параметрический стабилизатор на балластном и опорном элементах и токсюграничивающие резисторы, отличающаяся тем, что, с целью уменьшения энергопотребления от сети и повышения надежности системы, в нее введены трансформатор и дополнительный источник постоянного тока, балластный элемент выполнен в виде стабилизатора...
Гідравлічна система дистанційного управління вугледобувним агрегатом
Номер патенту: 13616
Опубліковано: 25.04.1997
Автори: Беккер Гарасим Харитонович, Файзулін Михайло Косьянович, Озерянський Генріх Йосифович
МПК: E21D 23/16
Мітки: дистанційного, гідравлічна, вугледобувним, управління, агрегатом, система
Формула / Реферат:
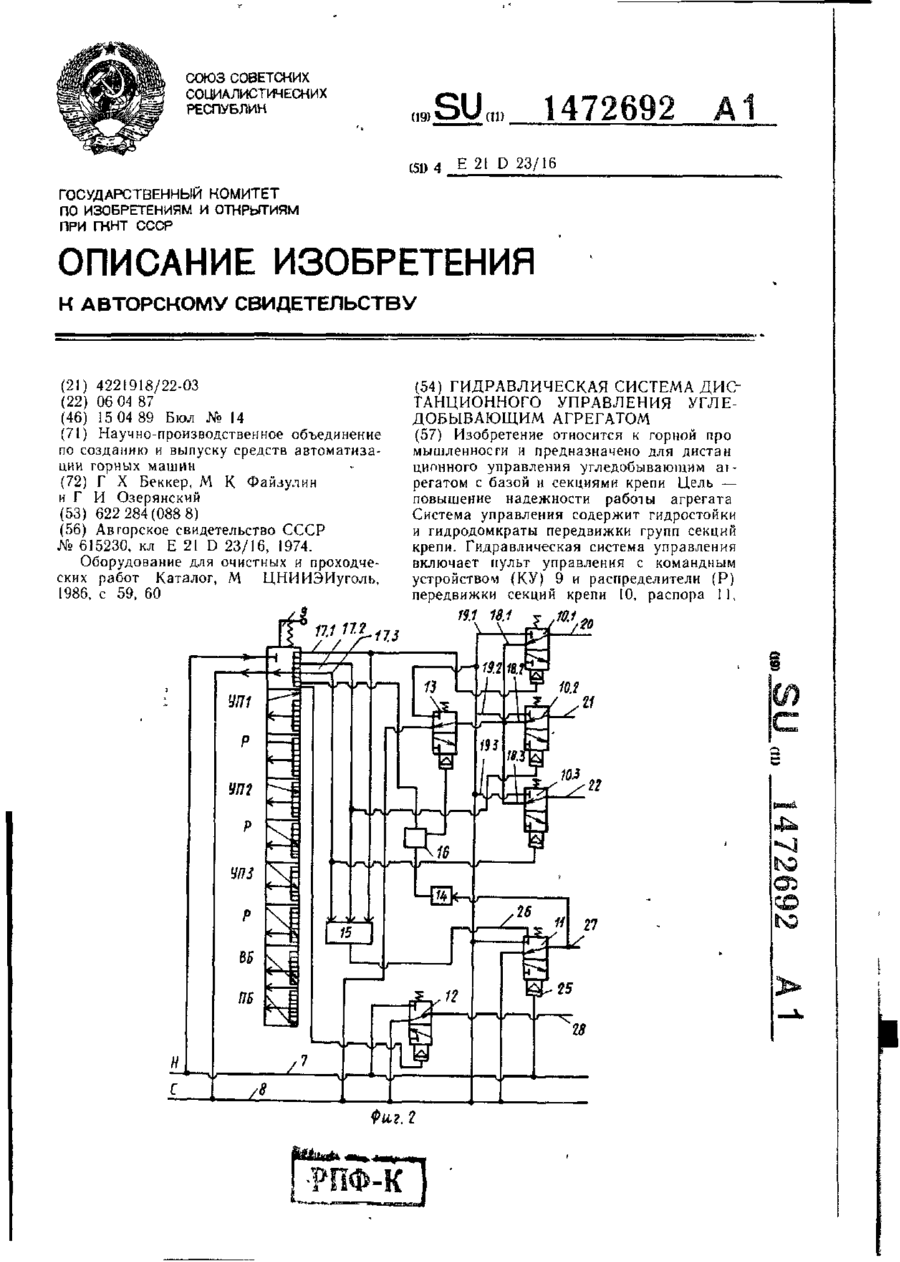
Гидравлическая система дистанционного управления угледобывающим агрегатом, включающая гидростойки и гидродомкраты передвижки групп секций крепи, насосную установку, пульт управления с командным устройством и распределителями передвижки секций крепи, распора и подачи базы, гидролиний напора, слива и управления, соединяющие насосную установку с командным устройством и распределителями пульта управления, которые соединены гидролиниями...
Гідравлічна система дистанційного управління секціями вугледобувного агрегата
Номер патенту: 13614
Опубліковано: 25.04.1997
Автори: Стрєкалов Анатолій Іванович, Беккер Гарасим Харитонович, Савченко Анатолій Тихонович, Озерянський Генріх Йосифович
МПК: E21D 23/16
Мітки: вугледобувного, секціями, агрегата, система, управління, гідравлічна, дистанційного
Формула / Реферат:
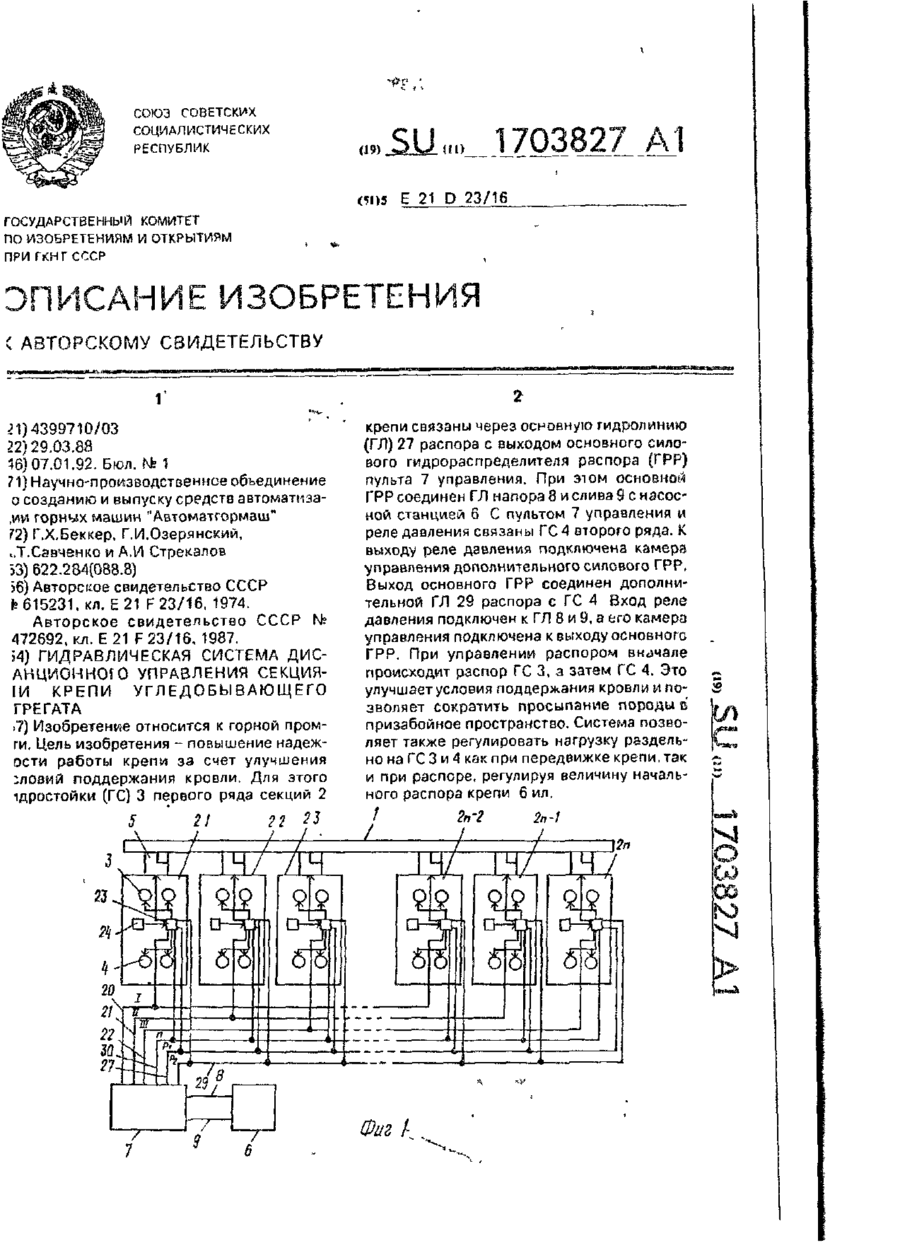
Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата, содержащая гидростойки первого ряда, связанные через основную гидролинию распора с выходом основного силового гидрораспределителя распора пульта управления, соединенного линиями напора и слива с насосной станцией, гидростойки второго ряда, связанные с пультом управления и реле давления, отличающаяся тем, что, с целью повышения надежности работы крепи...
Попередній патент: Знак розпізнавальний
Наступний патент: Універсальна головка сифона
Випадковий патент: Спосіб одержання сорбенту і установка для його здійснення