Пристрій для кутової стабілізації безпілотного літального апарата
Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Симонов Володимир Федорович, Амеліна Ірина Вікторівна, Субота Анатолій Максимович

Формула / Реферат
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та суматор, який відрізняється тим, що до його складу введено перший електронний ключ, перший вхід якого з’єднаний з виходом датчика відхилення кутового положення, а вихід з’єднаний з входом першого перетворювача аналог-код, джерело еталонного сигналу, вихід якого з’єднаний з першим входом другого електронного ключа, другий електронний ключ, другий вхід якого з’єднаний з виходом датчика відхилення кутового положення, а вихід - з входом другого перетворювача аналог-код, другий перетворювач аналог-код, вихід якого з’єднаний з першим входом мультиплексора, другий вхід якого з’єднаний з виходом першого перетворювача аналог-код, а вихід - з входом мікропроцесора, вихід якого з’єднаний з другим електронним ключем, та третій електронний ключ, перший вхід якого з’єднаний з виходом другого перетворювача аналог-код, другий - з виходом першого перетворювача аналог-код, а вихід з’єднаний з входом форсуючої ланки.
Текст
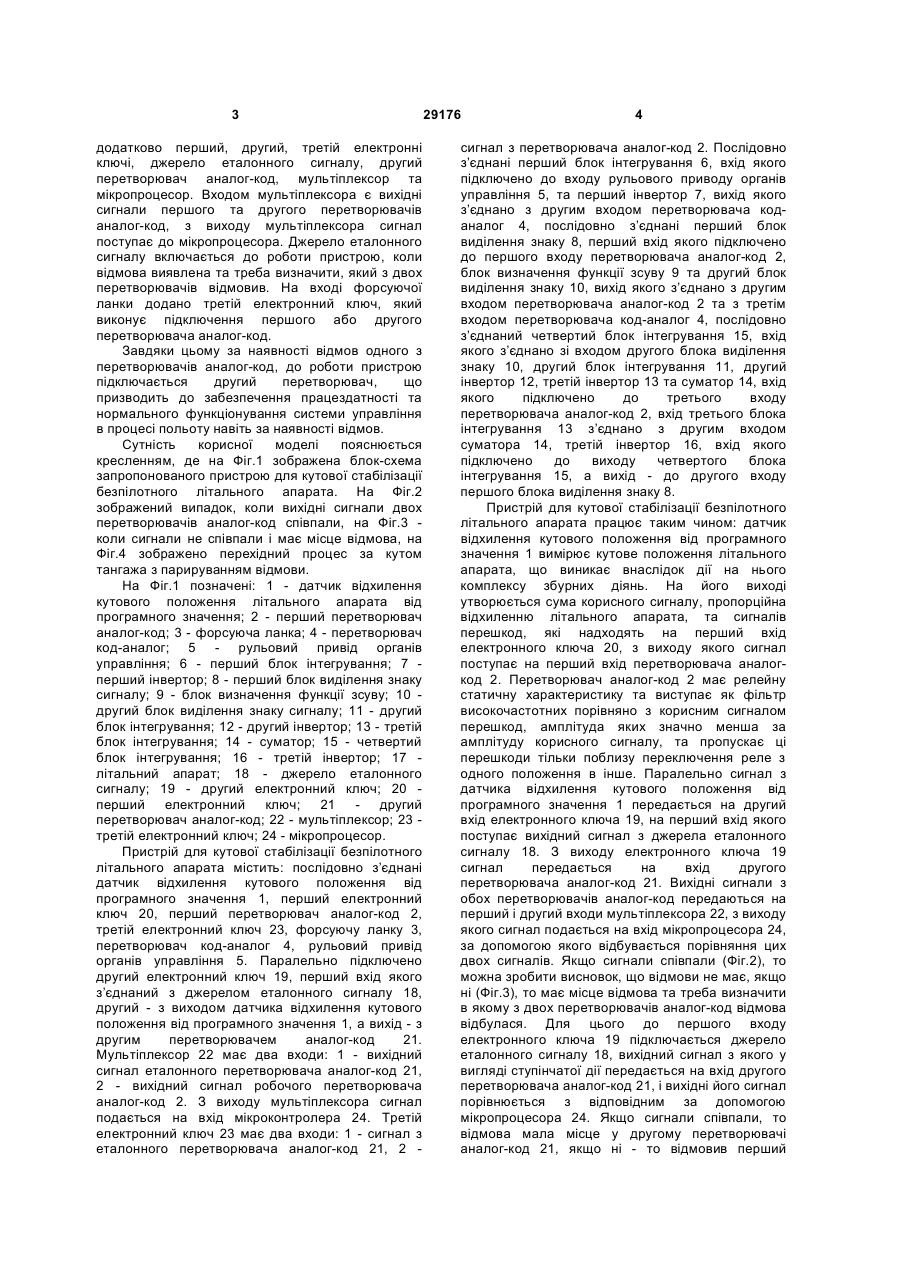
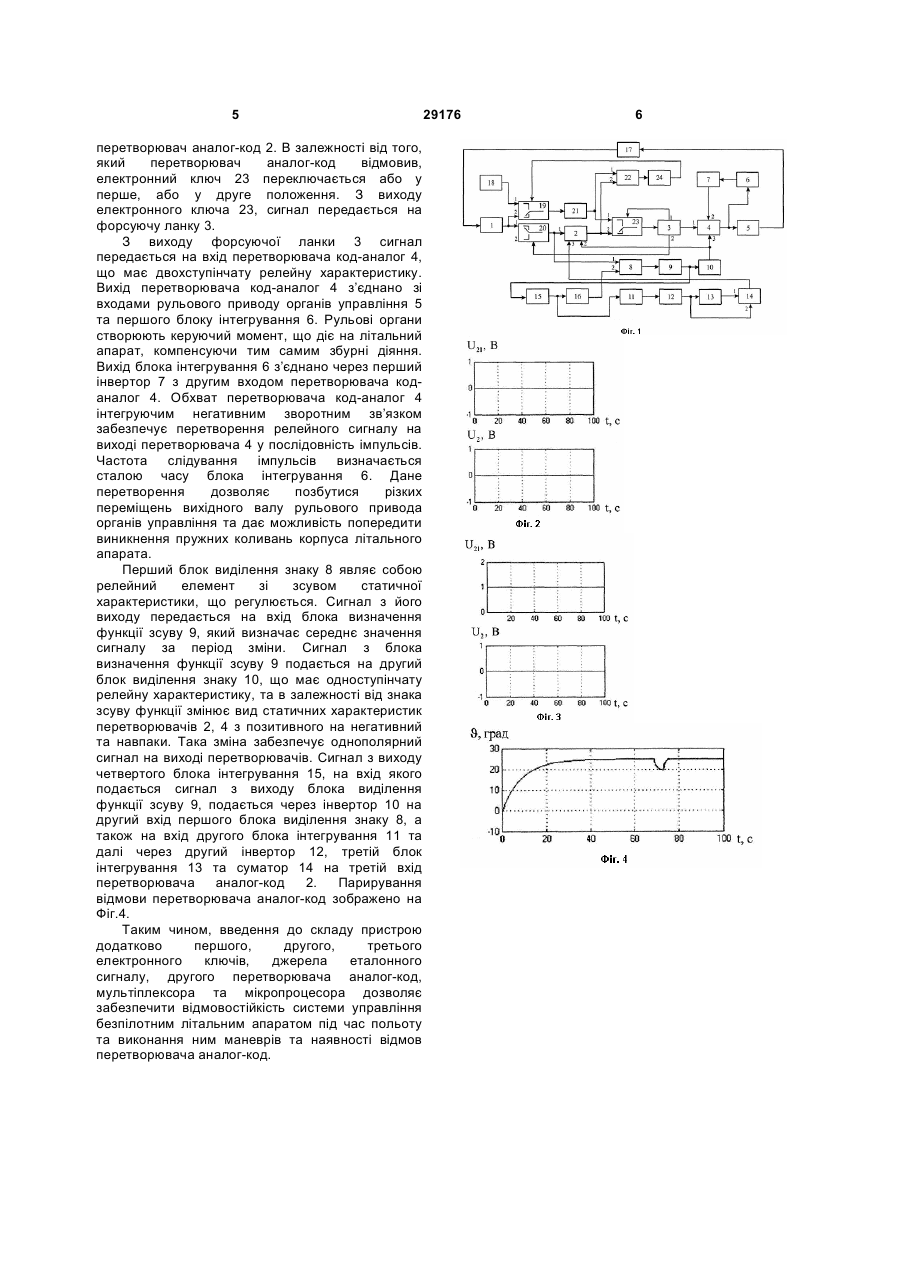
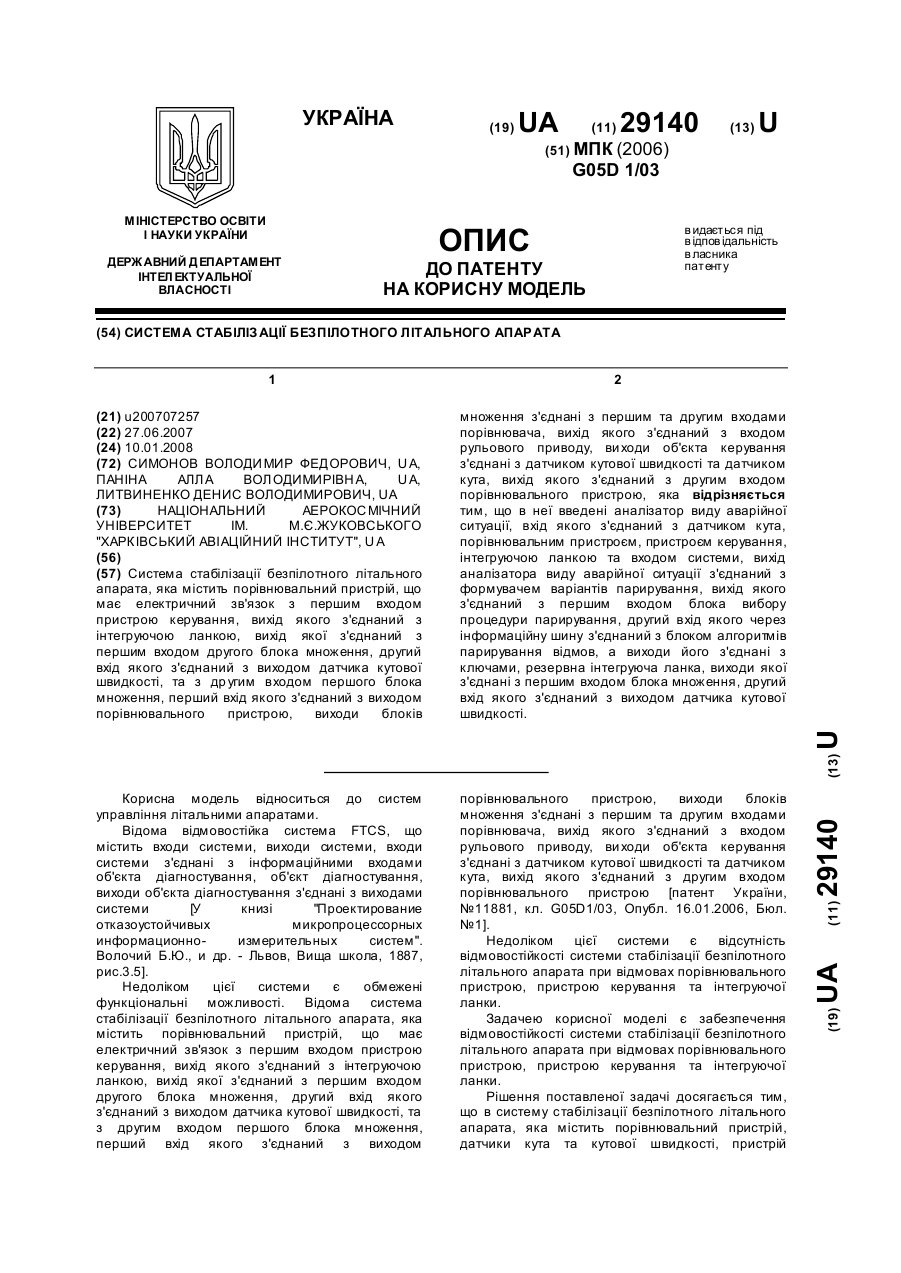
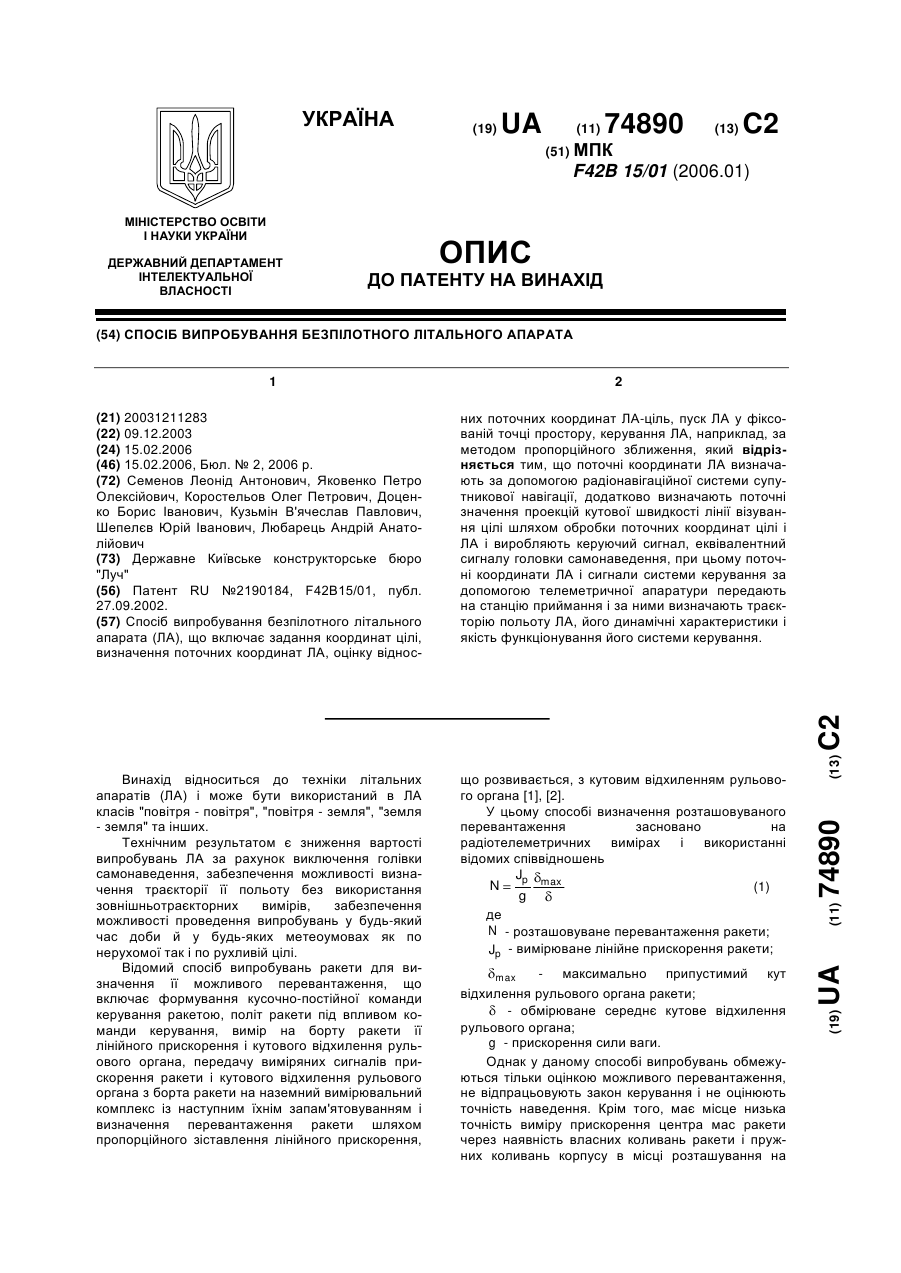
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач коданалог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та суматор, який U 1 3 додатково перший, другий, третій електронні ключі, джерело еталонного сигналу, другий перетворювач аналог-код, мультіплексор та мікропроцесор. Входом мультіплексора є вихідні сигнали першого та другого перетворювачів аналог-код, з виходу мультіплексора сигнал поступає до мікропроцесора. Джерело еталонного сигналу включається до роботи пристрою, коли відмова виявлена та треба визначити, який з двох перетворювачів відмовив. На вході форсуючої ланки додано третій електронний ключ, який виконує підключення першого або другого перетворювача аналог-код. Завдяки цьому за наявності відмов одного з перетворювачів аналог-код, до роботи пристрою підключається другий перетворювач, що призводить до забезпечення працездатності та нормального функціонування системи управління в процесі польоту навіть за наявності відмов. Сутність корисної моделі пояснюється кресленням, де на Фіг.1 зображена блок-схема запропонованого пристрою для кутової стабілізації безпілотного літального апарата. На Фіг.2 зображений випадок, коли вихідні сигнали двох перетворювачів аналог-код співпали, на Фіг.3 коли сигнали не співпали і має місце відмова, на Фіг.4 зображено перехідний процес за кутом тангажа з парируванням відмови. На Фіг.1 позначені: 1 - датчик відхилення кутового положення літального апарата від програмного значення; 2 - перший перетворювач аналог-код; 3 - форсуюча ланка; 4 - перетворювач код-аналог; 5 - рульовий привід органів управління; 6 - перший блок інтегрування; 7 перший інвертор; 8 - перший блок виділення знаку сигналу; 9 - блок визначення функції зсуву; 10 другий блок виділення знаку сигналу; 11 - другий блок інтегрування; 12 - другий інвертор; 13 - третій блок інтегрування; 14 - суматор; 15 - четвертий блок інтегрування; 16 - третій інвертор; 17 літальний апарат; 18 - джерело еталонного сигналу; 19 - другий електронний ключ; 20 перший електронний ключ; 21 - другий перетворювач аналог-код; 22 - мультіплексор; 23 третій електронний ключ; 24 - мікропроцесор. Пристрій для кутової стабілізації безпілотного літального апарата містить: послідовно з’єднані датчик відхилення кутового положення від програмного значення 1, перший електронний ключ 20, перший перетворювач аналог-код 2, третій електронний ключ 23, форсуючу ланку 3, перетворювач код-аналог 4, рульовий привід органів управління 5. Паралельно підключено другий електронний ключ 19, перший вхід якого з’єднаний з джерелом еталонного сигналу 18, другий - з виходом датчика відхилення кутового положення від програмного значення 1, а вихід - з другим перетворювачем аналог-код 21. Мультіплексор 22 має два входи: 1 - вихідний сигнал еталонного перетворювача аналог-код 21, 2 - вихідний сигнал робочого перетворювача аналог-код 2. З виходу мультіплексора сигнал подається на вхід мікроконтролера 24. Третій електронний ключ 23 має два входи: 1 - сигнал з еталонного перетворювача аналог-код 21, 2 29176 4 сигнал з перетворювача аналог-код 2. Послідовно з’єднані перший блок інтегрування 6, вхід якого підключено до входу рульового приводу органів управління 5, та перший інвертор 7, вихід якого з’єднано з другим входом перетворювача коданалог 4, послідовно з’єднані перший блок виділення знаку 8, перший вхід якого підключено до першого входу перетворювача аналог-код 2, блок визначення функції зсуву 9 та другий блок виділення знаку 10, вихід якого з’єднано з другим входом перетворювача аналог-код 2 та з третім входом перетворювача код-аналог 4, послідовно з’єднаний четвертий блок інтегрування 15, вхід якого з’єднано зі входом другого блока виділення знаку 10, другий блок інтегрування 11, другий інвертор 12, третій інвертор 13 та суматор 14, вхід якого підключено до третього входу перетворювача аналог-код 2, вхід третього блока інтегрування 13 з’єднано з другим входом суматора 14, третій інвертор 16, вхід якого підключено до виходу четвертого блока інтегрування 15, а вихід - до другого входу першого блока виділення знаку 8. Пристрій для кутової стабілізації безпілотного літального апарата працює таким чином: датчик відхилення кутового положення від програмного значення 1 вимірює кутове положення літального апарата, що виникає внаслідок дії на нього комплексу збурних діянь. На його виході утворюється сума корисного сигналу, пропорційна відхиленню літального апарата, та сигналів перешкод, які надходять на перший вхід електронного ключа 20, з виходу якого сигнал поступає на перший вхід перетворювача аналогкод 2. Перетворювач аналог-код 2 має релейну статичну характеристику та виступає як фільтр високочастотних порівняно з корисним сигналом перешкод, амплітуда яких значно менша за амплітуду корисного сигналу, та пропускає ці перешкоди тільки поблизу переключення реле з одного положення в інше. Паралельно сигнал з датчика відхилення кутового положення від програмного значення 1 передається на другий вхід електронного ключа 19, на перший вхід якого поступає вихідний сигнал з джерела еталонного сигналу 18. З виходу електронного ключа 19 сигнал передається на вхід другого перетворювача аналог-код 21. Вихідні сигнали з обох перетворювачів аналог-код передаються на перший і другий входи мультіплексора 22, з виходу якого сигнал подається на вхід мікропроцесора 24, за допомогою якого відбувається порівняння цих двох сигналів. Якщо сигнали співпали (Фіг.2), то можна зробити висновок, що відмови не має, якщо ні (Фіг.3), то має місце відмова та треба визначити в якому з двох перетворювачів аналог-код відмова відбулася. Для цього до першого входу електронного ключа 19 підключається джерело еталонного сигналу 18, вихідний сигнал з якого у вигляді ступінчатої дії передається на вхід другого перетворювача аналог-код 21, і вихідні його сигнал порівнюється з відповідним за допомогою мікропроцесора 24. Якщо сигнали співпали, то відмова мала місце у другому перетворювачі аналог-код 21, якщо ні - то відмовив перший 5 перетворювач аналог-код 2. В залежності від того, який перетворювач аналог-код відмовив, електронний ключ 23 переключається або у перше, або у друге положення. З виходу електронного ключа 23, сигнал передається на форсуючу ланку 3. З виходу форсуючої ланки 3 сигнал передається на вхід перетворювача код-аналог 4, що має двохступінчату релейну характеристику. Вихід перетворювача код-аналог 4 з’єднано зі входами рульового приводу органів управління 5 та першого блоку інтегрування 6. Рульові органи створюють керуючий момент, що діє на літальний апарат, компенсуючи тим самим збурні діяння. Вихід блока інтегрування 6 з’єднано через перший інвертор 7 з другим входом перетворювача коданалог 4. Обхват перетворювача код-аналог 4 інтегруючим негативним зворотним зв’язком забезпечує перетворення релейного сигналу на виході перетворювача 4 у послідовність імпульсів. Частота слідування імпульсів визначається сталою часу блока інтегрування 6. Дане перетворення дозволяє позбутися різких переміщень вихідного валу рульового привода органів управління та дає можливість попередити виникнення пружних коливань корпуса літального апарата. Перший блок виділення знаку 8 являє собою релейний елемент зі зсувом статичної характеристики, що регулюється. Сигнал з його виходу передається на вхід блока визначення функції зсуву 9, який визначає середнє значення сигналу за період зміни. Сигнал з блока визначення функції зсуву 9 подається на другий блок виділення знаку 10, що має одноступінчату релейну характеристику, та в залежності від знака зсуву функції змінює вид статичних характеристик перетворювачів 2, 4 з позитивного на негативний та навпаки. Така зміна забезпечує однополярний сигнал на виході перетворювачів. Сигнал з виходу четвертого блока інтегрування 15, на вхід якого подається сигнал з виходу блока виділення функції зсуву 9, подається через інвертор 10 на другий вхід першого блока виділення знаку 8, а також на вхід другого блока інтегрування 11 та далі через другий інвертор 12, третій блок інтегрування 13 та суматор 14 на третій вхід перетворювача аналог-код 2. Парирування відмови перетворювача аналог-код зображено на Фіг.4. Таким чином, введення до складу пристрою додатково першого, другого, третього електронного ключів, джерела еталонного сигналу, другого перетворювача аналог-код, мультіплексора та мікропроцесора дозволяє забезпечити відмовостійкість системи управління безпілотним літальним апаратом під час польоту та виконання ним маневрів та наявності відмов перетворювача аналог-код. 29176 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for angular stabilization pilotless aircraft
Автори англійськоюSymonov Volodymyr Fedorovych, Subota Anatolii Maksymovych, Amelina Iryna Viktorivna
Назва патенту російськоюУстройство для угловой стабилизации беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Субота Анатолий Максимович, Амелина Ирина Викторовна
МПК / Мітки
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, кутової, літального, безпілотного, апарата, пристрій
Код посилання
<a href="https://ua.patents.su/3-29176-pristrijj-dlya-kutovo-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Пристрій для кутової стабілізації безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Паніна Алла Володимирівна, Симонов Володимир Федорович, Литвиненко Денис Володимирович
МПК: G05D 1/03
Мітки: стабілізації, система, безпілотного, літального, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, система, безпілотного, літального, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Антошик Вікторія Миколаївна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, безпілотного, система, літального, апарата
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Спосіб випробування безпілотного літального апарата
Номер патенту: 74890
Опубліковано: 15.02.2006
Автори: Шепелєв Юрій Іванович, Кузьмін В'ячеслав Павлович, Любарець Андрій Анатолійович, Семенов Леонід Антонович, Доценко Борис Іванович, Коростельов Олег Петрович, Яковенко Петро Олексійович
МПК: F42B 15/01
Мітки: літального, безпілотного, випробування, апарата, спосіб
Формула / Реферат:
Спосіб випробування безпілотного літального апарата (ЛА), що включає задання координат цілі, визначення поточних координат ЛА, оцінку відносних поточних координат ЛА-ціль, пуск ЛА у фіксованій точці простору, керування ЛА, наприклад, за методом пропорційного зближення, який відрізняється тим, що поточні координати ЛА визначають за допомогою радіонавігаційної системи супутникової навігації, додатково визначають поточні значення проекцій...
Система кутової стабілізації космічних апаратів
Номер патенту: 4526
Опубліковано: 17.01.2005
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Кузякін Юрій Петрович
МПК: B64G 1/28
Мітки: кутової, стабілізації, система, апаратів, космічних
Формула / Реферат:
Система кутової стабілізації космічних апаратів, що містить послідовно з'єднані електропривід, редуктор і маховик, яка відрізняється тим, що вона споряджена другим електроприводом, другим редуктором, причому виходи першого та другого редукторів, підключені до першого та другого входам диференціала, вихід якого з'єднай з маховиком, вихід першого редуктора через перший вимірювач кутової швидкості першого електропривода та перший масштабний...
Попередній патент: Установка для магнітно-імпульсної обробки металів серією імпульсів
Наступний патент: Двограничний сигналізатор-регулятор рівня сипких матеріалів
Випадковий патент: Спосіб одержання пінополіуретанів, здатних до деградації