Пристрій для перетворення гіперболічної системи координат у декартову
Номер патенту: 63562
Опубліковано: 15.01.2004
Автори: Осадчий Юрій Михайлович, Кисельов Олексій Олександрович, Марігодов Володимир Костянтинович

Формула / Реферат
Пристрій для перетворення гіперболічної системи координат у декартову, що містить послідовно з’єднані регістр першої гіперболічної координати, комутатор, блок додавання, вузол зв'язку координат, перший вхід блока віднімання, а також регістр другої гіперболічної координати, підключений до другого входу блока віднімання, і помножувач, який відрізняється тим, що в нього введені компаратор, лічильник номера ітерації перетворення, двопозиційний ключ, інвертор знака, при цьому вхід компаратора підключений до виходу блока віднімання, а вихід компаратора підключений до входу лічильника номера ітерації і до керуючого входу ключа, вихід лічильника номера ітерації з’єднаний зі входом помножувача, а вихід останнього підключено до інформаційного входу ключа, один з виходів ключа підключений до входу інвертора, а другий вихід ключа і вихід інвертора підключені до другого входу блока додавання.
Текст
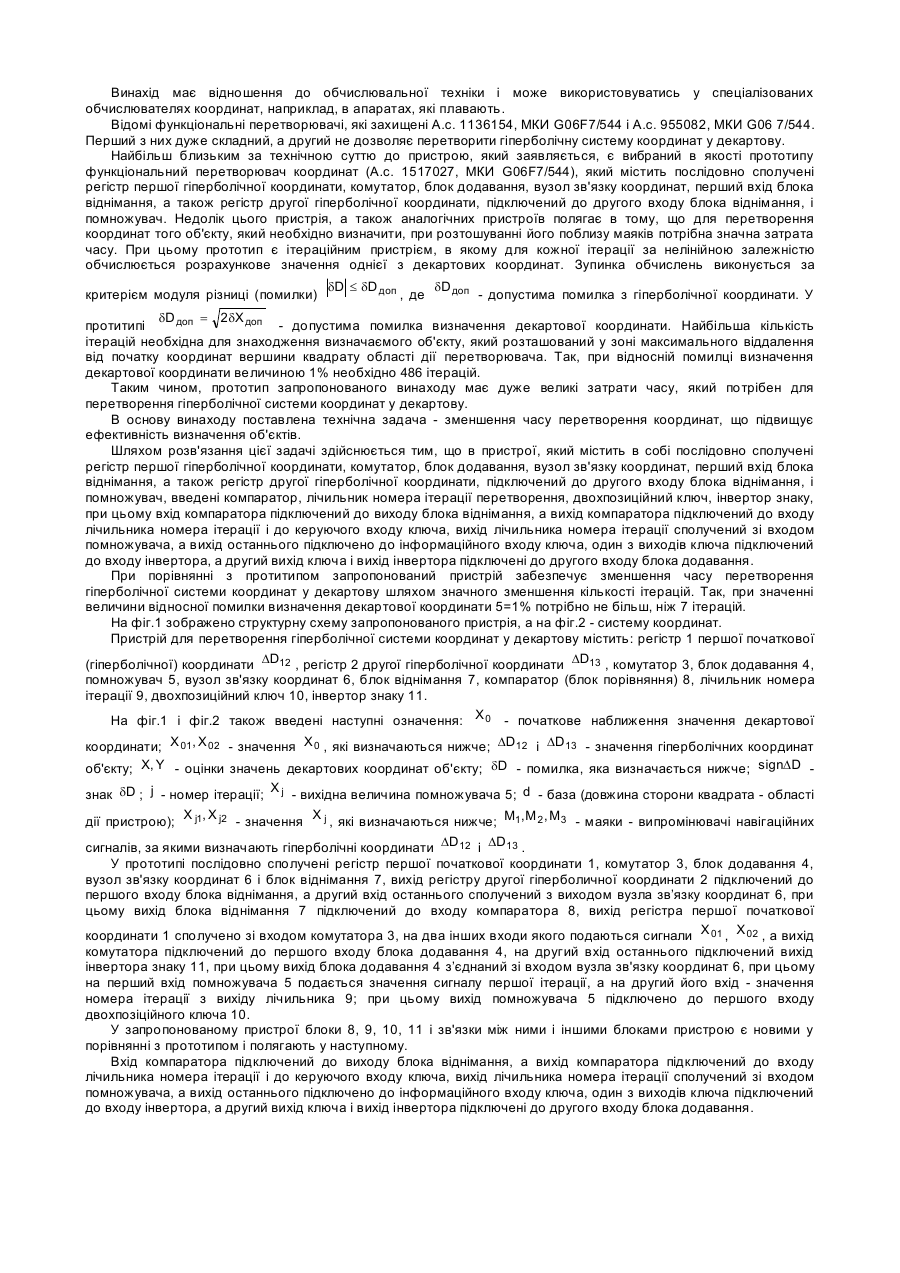
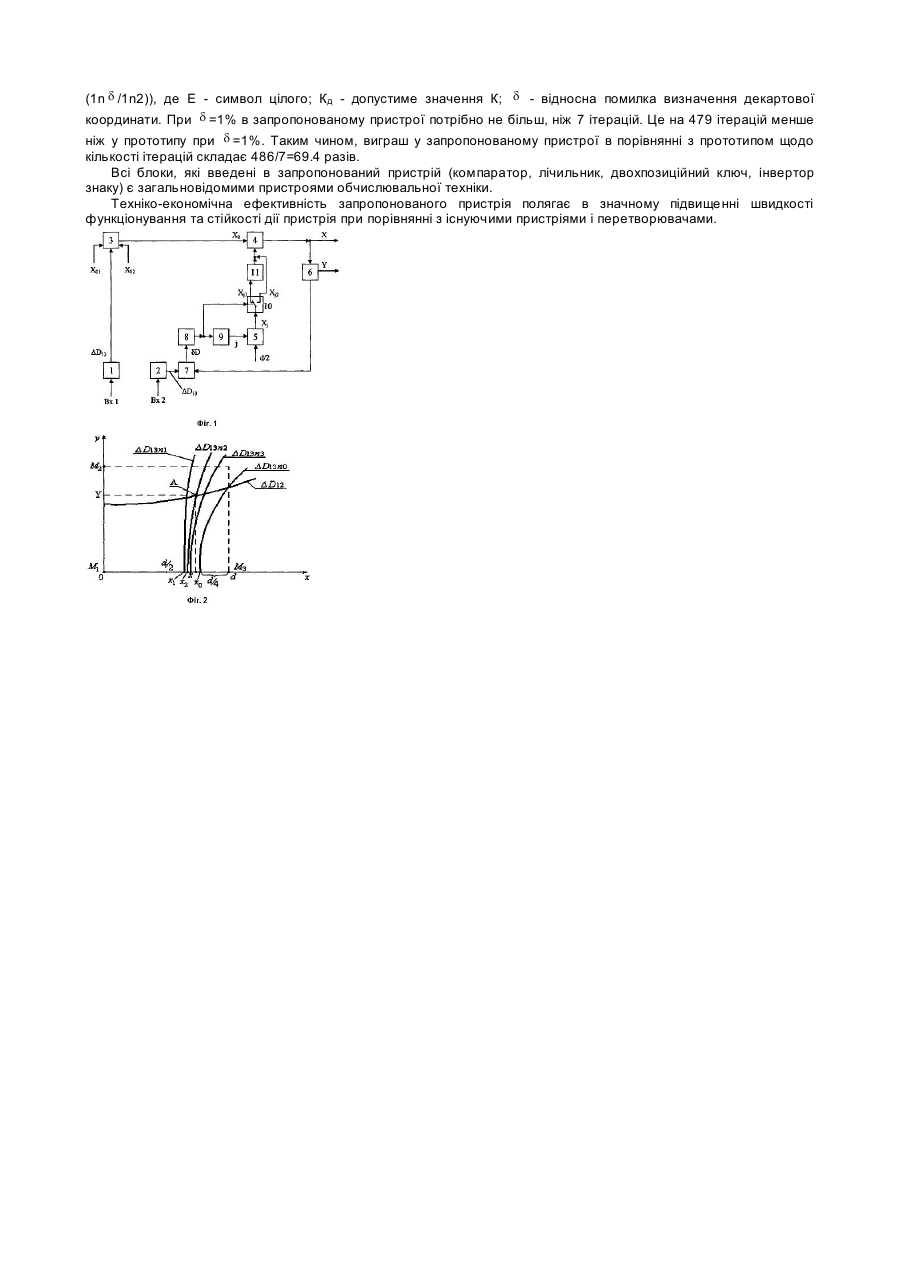
Винахід має відношення до обчислювальної техніки і може використовуватись у спеціалізованих обчислювателях координат, наприклад, в апаратах, які плавають. Відомі функціональні перетворювачі, які захищені А.с. 1136154, МКИ G06F7/544 і А.с. 955082, МКИ G06 7/544. Перший з них дуже складний, а другий не дозволяє перетворити гіперболічну систему координат у декартову. Найбільш близьким за технічною суттю до пристрою, який заявляється, є вибраний в якості прототипу функціональний перетворювач координат (А.с. 1517027, МКИ G06F7/544), який містить послідовно сполучені регістр першої гіперболічної координати, комутатор, блок додавання, вузол зв'язку координат, перший вхід блока віднімання, а також регістр другої гіперболічної координати, підключений до другого входу блока віднімання, і помножувач. Недолік цього пристрія, а також аналогічних пристроїв полягає в тому, що для перетворення координат того об'єкту, який необхідно визначити, при розтошуванні його поблизу маяків потрібна значна затрата часу. При цьому прототип є ітераційним пристрієм, в якому для кожної ітерації за нелінійною залежністю обчислюється розрахункове значення однієї з декартових координат. Зупинка обчислень виконується за критерієм модуля різниці (помилки) dD £ dD доп , де dD доп - допустима помилка з гіперболічної координати. У dD доп = 2 dX доп - допустима помилка визначення декартової координати. Найбільша кількість протитипі ітерацій необхідна для знаходження визначаємого об'єкту, який розташований у зоні максимального віддалення від початку координат вершини квадрату області дії перетворювача. Так, при відносній помилці визначення декартової координати величиною 1% необхідно 486 ітерацій. Таким чином, прототип запропонованого винаходу має дуже великі затрати часу, який потрібен для перетворення гіперболічної системи координат у декартову. В основу винаходу поставлена технічна задача - зменшення часу перетворення координат, що підвищує ефективність визначення об'єктів. Шляхом розв'язання цієї задачі здійснюється тим, що в пристрої, який містить в собі послідовно сполучені регістр першої гіперболічної координати, комутатор, блок додавання, вузол зв'язку координат, перший вхід блока віднімання, а також регістр другої гіперболічної координати, підключений до другого входу блока віднімання, і помножувач, введені компаратор, лічильник номера ітерації перетворення, двохпозиційний ключ, інвертор знаку, при цьому вхід компаратора підключений до виходу блока віднімання, а вихід компаратора підключений до входу лічильника номера ітерації і до керуючого входу ключа, вихід лічильника номера ітерації сполучений зі входом помножувача, а вихід останнього підключено до інформаційного входу ключа, один з виходів ключа підключений до входу інвертора, а другий вихід ключа і вихід інвертора підключені до другого входу блока додавання. При порівнянні з протитипом запропонований пристрій забезпечує зменшення часу перетворення гіперболічної системи координат у декартову шляхом значного зменшення кількості ітерацій. Так, при значенні величини відносної помилки визначення декартової координати 5=1% потрібно не більш, ніж 7 ітерацій. На фіг.1 зображено структурну схему запропонованого пристрія, а на фіг.2 - систему координат. Пристрій для перетворення гіперболічної системи координат у декартову містить: регістр 1 першої початкової (гіперболічної) координати DD12 , регістр 2 другої гіперболічної координати DD13 , комутатор 3, блок додавання 4, помножувач 5, вузол зв'язку координат 6, блок віднімання 7, компаратор (блок порівняння) 8, лічильник номера ітерації 9, двохпозиційний ключ 10, інвертор знаку 11. На фіг.1 і фіг.2 також введені наступні означення: X 0 - початкове наближення значення декартової координати; X 01, X 02 - значення X 0 , які визначаються нижче; DD12 і DD13 - значення гіперболічних координат об'єкту; X, Y - оцінки значень декартових координат об'єкту; dD - помилка, яка визначається нижче; signDD X знак dD ; j - номер ітерації; j - вихідна величина помножувача 5; d - база (довжина сторони квадрата - області X ,X Xj дії пристрою); j1 j2 - значення , які визначаються нижче; M1, M 2 , M3 - маяки - випромінювачі навігаційних сигналів, за якими визначають гіперболічні координати DD12 і DD13 . У прототипі послідовно сполучені регістр першої початкової координати 1, комутатор 3, блок додавання 4, вузол зв'язку координат 6 і блок віднімання 7, вихід регістру другої гіперболичної координати 2 підключений до першого входу блока віднімання, а другий вхід останнього сполучений з виходом вузла зв’язку координат 6, при цьому вихід блока віднімання 7 підключений до входу компаратора 8, вихід регістра першої початкової координати 1 сполучено зі входом комутатора 3, на два інших входи якого подаються сигнали X 01 , X 02 , а вихід комутатора підключений до першого входу блока додавання 4, на другий вхід останнього підключений вихід інвертора знаку 11, при цьому вихід блока додавання 4 з’єднаний зі входом вузла зв'язку координат 6, при цьому на перший вхід помножувача 5 подається значення сигналу першої ітерації, а на другий його вхід - значення номера ітерації з вихіду лічильника 9; при цьому вихід помножувача 5 підключено до першого входу двохпозіційного ключа 10. У запропонованому пристрої блоки 8, 9, 10, 11 і зв'язки між ними і іншими блоками пристрою є новими у порівнянні з прототипом і полягають у наступному. Вхід компаратора підключений до виходу блока віднімання, а вихід компаратора підключений до входу лічильника номера ітерації і до керуючого входу ключа, вихід лічильника номера ітерації сполучений зі входом помножувача, а вихід останнього підключено до інформаційного входу ключа, один з виходів ключа підключений до входу інвертора, а другий вихід ключа і вихід інвертора підключені до другого входу блока додавання. Пристрій працює таким чином. Значення гіперболічних координат (різниці відстаней до маяків M1 , M2 і M1 , M3 ) вимірюються і фіксуються у регістрах 1 і 2. Комутатор згідно знаку встановить на своєму виході X 0 = X 01 або X 0 = X 02 за виразом: ì X 01 = 0,25d, DD13 < 0, X 0k = í î X 02 = 0,75d, DD13 ³ 0, (1) k = 12 ; На цьому нульовому кроці на другому вході блока додавання встановлено нульове значення. На вихід блока додавання і вхід вузла зв'язку координат надійде X = X 0 . На основі значень d , X , DD12 вузол зв'язку координат, як і в прототипі, визначить перше наближення (розрахункове значення) другої координати Y згідно з залежністю: d DD12 4X 2 (2) + 1+ . 2 2 d2 - DD 212 Крім того, на базі значень d, Х і Y вузол зв'язку координат визначить розрахункове (приблизне) значення другої гіперболічної координати DD13n за виразом: Y = F1 (X) = DD13n = F2 ( X, Y ) = X 2 + Y 2 - (d - X )2 + Y 2 . Блок віднімання визначить помилку (3) (4) dD = DD 13 - DD 13n . В приведеному више опису пристрій функціонує так само, як і прототип. Далі запропонований пристрій працює іншим чином. Компаратор визначає знак помилки signdD . Лічильник номера ітерації визначає номер X ітерації j. Помножувач відпрацьовує значення j згідно з залежністю: j æ d öæ 1 ö X j = X j-1 + ç ÷ç ÷ , è 2 øè 2 ø j = 1,2... - ціле. (5) Наприклад, на першій ітерації (j=l) X 1 = d/4 , на другій X 2 = d/8 і т.д. На кожній ітерації формується X половинне поділення від значення другої складової (5), яка одержана на базі попередньої ітерації. Значення j надходить до входу двохпозиційного ключа, який керується за знаком dD ( signdD ). На другий вхід блоку додавання 4 надходить значення ~ O jm X jm : j ì æ d öæ 1 ö ï X j1 = X j-1 + ç ÷ç ÷ , dD ³ 0, ï è 2 øè 2 ø =í j ï æ d öæ 1 ö ï X j2 = X j-1 - ç ÷ç ÷ , d D < 0 . è 2 øè 2 ø î (6) Друга складова в (6) має знак, який залежить від знака помилки dD . Далі відбувається визначення нового значення Y на основі залежності (2) і т.д. Зупинка обчислювань виконується так, як і в прототипі. Для пояснення результатів розглянутих вище дій звернемося до фіг.2. Нехай об'єкт знаходиться в точці А, проведено вимірювання значень гіперболічних координат DD12 і DD13 , а також значення декартових координат Х і Y. Комутатор 3 відпрацює значення X 0 = 0,75d = (0,5 + 0,25)d . Вузол зв'язку координат визначить відповідне DD 13 no значення таке, що знак dD < 0 . Помножувач 5 обчислить "додаток" (другу складову у виразі (5)), який має бути рівним 0,125d, і, згідно зі знаком dD , інвертор 11 на другому вході блоку додавання 4 встановить X 1 = ( 0,5 + 0,25 - 0,125)d . Вузол зв'язку координат обчислить значення DD 13 n1 , на наступному кроці DD 13 n2 і т.д. dD DD 13 n Значення з кожним кроком зменшується, a наближається до виміряного DD13 . При цьому модуль "додатку" на кожному кроці складає половину модуля "додатку" для попереднього кроку. Значення Х на виході блока додавання з кожною ітерацією наближається до дійсного значення координати Х об'єкту. Те ж саме відбувається і для координати Y. Запропонований пристрій, як і прототип, є системою, яка має замкнутість щодо помилки dD . Стійкість цієї системи забезпечується тому, що модуль другої складової в (5) і модуль помилки зменшуються на кожному кроці згідно з викладеним вище. Прототип має постійний коефіцієнт К в рівнянні замикання dX = KdD . Допустиме значення К визначається вимогами стійкості системи в межах всієї області функціонування. У запропонованому пристрої крок є змінним: великий спочатку, але зменшується в два рази на кожній наступній ітерації. Великі кроки забезпечують підвищення швидкості функціонування, а зменшення кроків забезпечує асимптотичну стійкість системи. Наведемо розрахунок виграшу, який має бути одержаним від використання запропонованого пристрою. Можна показати, що в прототипі необхідно Njпт=E(1/(Kд d )) ітерацій, а в запропонованому пристрою Njпр=E( (1n d /1n2)), де Е - символ цілого; Кд - допустиме значення К; d - відносна помилка визначення декартової координати. При d =1% в запропонованому пристрої потрібно не більш, ніж 7 ітерацій. Це на 479 ітерацій менше ніж у прототипу при d =1%. Таким чином, виграш у запропонованому пристрої в порівнянні з прототипом щодо кількості ітерацій складає 486/7=69.4 разів. Всі блоки, які введені в запропонований пристрій (компаратор, лічильник, двохпозиційний ключ, інвертор знаку) є загальновідомими пристроями обчислювальної техніки. Техніко-економічна ефективність запропонованого пристрія полягає в значному підвищенні швидкості функціонування та стійкості дії пристрія при порівнянні з існуючими пристріями і перетворювачами.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for transforming the hyperbolic coordinate system into the orthogonal coordinate system
Автори англійськоюKyseliov Oleksii Oleksandrovych, Marihodov Volodymyr Kostiantynovych
Назва патенту російськоюУстройство для преобразования гиперболической системы координат в декартову систему координат
Автори російськоюКиселев Алексей Александрович, Маригодов Владимир Константинович
МПК / Мітки
МПК: G06F 7/544, G06F 7/548
Мітки: пристрій, перетворення, координат, гіперболічної, системі, декартову
Код посилання
<a href="https://ua.patents.su/3-63562-pristrijj-dlya-peretvorennya-giperbolichno-sistemi-koordinat-u-dekartovu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для перетворення гіперболічної системи координат у декартову</a>
Перетворювач координат із гіперболічної системи у декартову
Номер патенту: 44744
Опубліковано: 15.03.2002
Автори: Чернега Віктор Степанович, Марігодов Володимир Костянтинович, Осадчий Юрій Михайлович, Федоров Дмитро Олексійович
МПК: G06F 7/548
Мітки: координат, декартову, гіперболічної, перетворювач, системі
Формула / Реферат:
Преобразователь координат из гиперболической системы в декартову, содержащий регистры первой и второй исходных координат, коммутаторы, накапливающие сумматоры, узел связи координат, вычитатели, регистры результирующих координат, отличающийся тем, что в него введены n регистров хранения значений приращений результирующих координат, две группы по n трехпозиционных ключей, две группы по n двухпозиционных ключей, первый, второй, третий и...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Карпов Анатолій Стєпановіч, Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Борісов Андрєй Владіміровіч, Монахов Юрій Владіміровіч, Рачук Владімір Сєргєєвіч
МПК: G01S 5/02, G01S 5/00, G01S 5/04
Мітки: системі, інерціальної, спосіб, варіанти, осей, положення, визначення, відносної, координат, об'єкта, базової, навігаційної
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Пристрій для моделювання імовірності відмов технічної системи
Номер патенту: 34309
Опубліковано: 15.02.2001
Автор: Зеленков Олександр Аврамович
МПК: G06F 15/00, G06G 7/52, G06G 7/48
Мітки: технічної, моделювання, пристрій, відмов, системі, імовірності
Текст:
...до першого входу третьої схеми І 14, другий вхід якої підключений до виходу другого генератора 15 тактових імпульсів, а вихід підключений до входу віднімання третього лічильника 16, вхід скидання якого підключений до виходу першої схеми АБО 11. Вихід третього лічильника 16 з'єднаний із адресними входами постійних запам'ятовуючих пристроїв 171...17r і підключений до входу ци фро - аналогового перетворювача 18, вихід якого підключений...
Пристрій для формування адрес процесора швидкого перетворення фур’є
Номер патенту: 53219
Опубліковано: 15.01.2003
Автор: Волинець Віктор Іванович
МПК: G06F 17/14
Мітки: процесора, адрес, пристрій, перетворення, швидкого, фур'є, формування
Формула / Реферат:
1. Пристрій для формування адрес процесора швидкого перетворення Фур'є, що містить перший і другий лічильники, блок постійної пам’яті, групу з N (N - максимальна розрядність адреси) мультиплексорів, перший мультиплексор, перший регістр та блок керування, тактовий вхід якого є тактовим входом пристрою, інформаційними виходами якого є виходи першого регістра, тактовий вхід якого підключений до другого виходу блока керування, перший вихід якого...
Пристрій для швидкого дійсного перетворення хартлі-фур’є
Номер патенту: 46339
Опубліковано: 15.05.2002
Автор: Волинець Віктор Іванович
МПК: G06F 15/00, G06F 17/14
Мітки: пристрій, швидкого, перетворення, хартлі-фур'є, дійсного
Формула / Реферат:
Пристрій для швидкого дійсного перетворення Хартлі-Фур'є, що містить блок синхронізації, блок постійної пам'яті, два лічильники адрес, два вхідні регістри, регістр, вихідний регістр, три комутатори, два помножувачі, суматор-віднімач і блок пам'яті, вихід якого є інформаційним виходом пристрою та підключений до інформаційних входів першого та другого вхідних регістрів, перший вихід блока синхронізації підключений до лічильного входу першого...
Попередній патент: Пристрій захисту заглибного електродвигуна водяного насоса
Наступний патент: Спосіб масової переробки біовідходів з одержанням газу метану і сільськогосподарських добрив
Випадковий патент: Спосіб хірургічного лікування сечокам'яної хвороби