Спосіб визначення магнітних параметрів пуассона
Номер патенту: 66083
Опубліковано: 26.12.2011
Автори: Мелешко Владислав Валентинович, Костюк Олександр Юрійович

Формула / Реферат
Спосіб визначення магнітних параметрів Пуассона, який полягає в тому, що в місці визначення параметрів на об'єкті жорстко встановлюють тривісний магнітометр, який вимірює проекції вектора індукції загального магнітного поля Землі і об'єкта Т" на осі об'єкта; за інформацією про вектор індукції магнітного поля Землі Т з магнітних карт або калькуляторів за даними про кути курсу, крену, диференту об'єкта та про магнітне схилення розраховують проекції вектора Т на осі об'єкта; в умовах зміни як мінімум двох з трьох кутів об'єкта (курсу, крену, диференту) порівнюють (віднімають) виміряні і розраховані проекції векторів індукції; по 4 або більше обчислених різницях проекцій обчислюють оцінки 12 параметрів Пуассона.
Текст
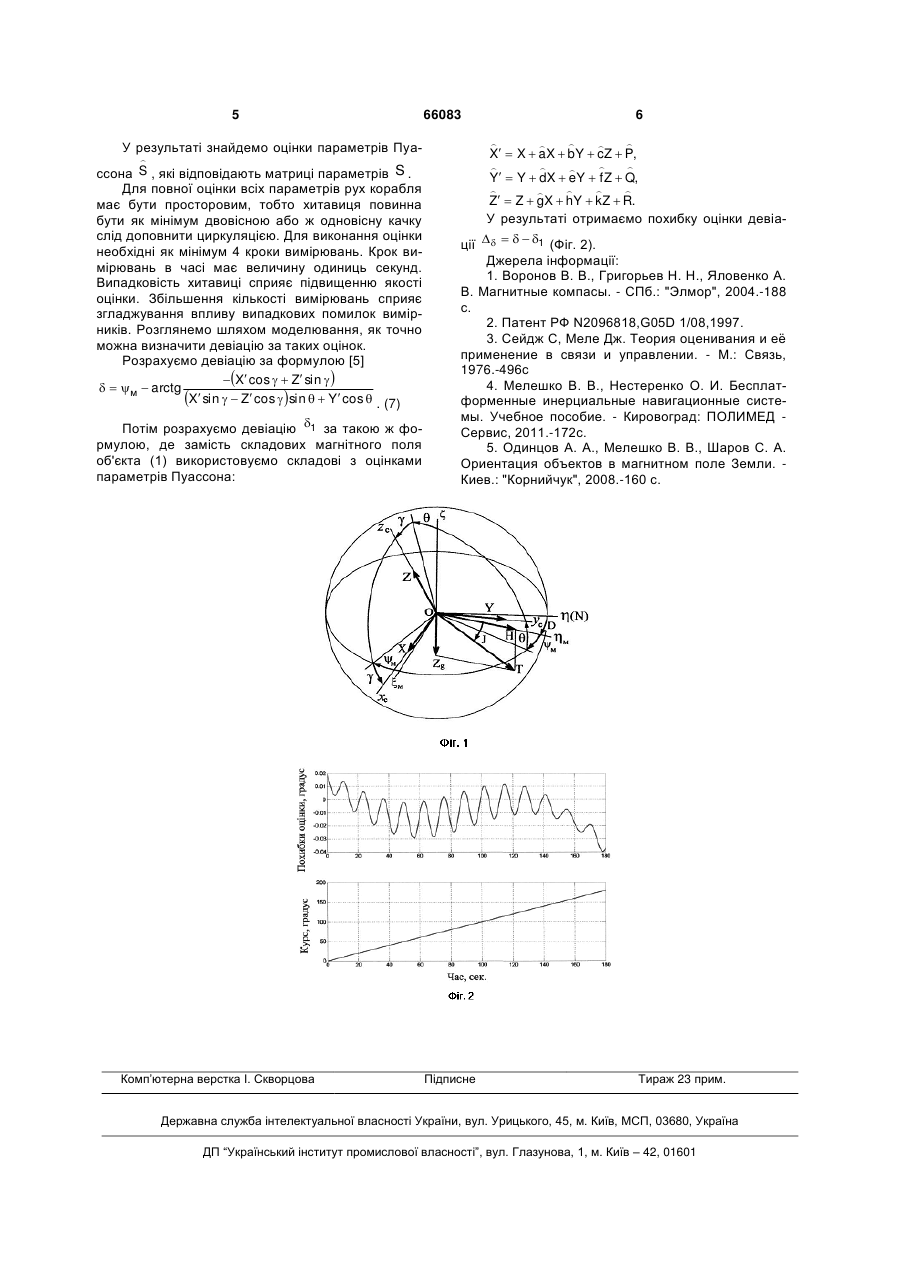
Спосіб визначення магнітних параметрів Пуассона, який полягає в тому, що в місці визначення параметрів на об'єкті жорстко встановлюють тривісний магнітометр, який вимірює проекції вектора 3 66083 Крім того, для реалізації відомого способу слід виміряти синхронно з вимірюванням кутів курсу, крену, тангажу об'єкта по десять проекцій векторів магнітної індукції на кожну вісь системи координат об'єкта, а також модуль вектора магнітної індукції при відсутності об'єкта. Отже, для визначення коефіцієнтів Пуассона відомим способом потрібно виміряти від двадцяти до тридцяти значень кутів, а також синхронно з вимірюванням цих кутів виміряти тридцять значень проекцій векторів магнітної індукції на осі опорної системи координат. Таким чином, відомий спосіб пов'язаний з великою кількістю вимірів кутів курсу, крену, тангажу об'єкта, вимірювань проекцій векторів магнітної індукції на рухомому об'єкті, а також з істотним часом обробки результатів виміряних параметрів. В основу запропонованого способу поставлена задача визначення всіх дев'яти коефіцієнтів Пуассона за найкоротший час по істотно меншій від прототипу кількості вимірів, що дозволить швидко і з високою точністю компенсувати (знищити) девіацію. Пропонований спосіб визначення коефіцієнтів Пуассона, полягає в наступному. Магнітне поле в конкретній точці об'єкту описують рівняннями Пуассона [1]: 4 X X aX bY cZ P; Y Y dX eY fZ Q; Z Z gX hY kZ R; (1) Представимо модель (1) у векторно-матричній формі. T I FCTg M , (2) T де T X Y Z - вектор індукції магнітного поля об'єкта в осях об'єкта, I - одинична матриця, a b c F d e f g h k - матриця параметрів магнітом'якого T 0 H ZT заліза, g - вектор індукції магнітного поля Землі (МПЗ), представлений горизонтальною H та вертикальною Z складовими. C f м, , матриця напрямних косинусів між супроводжуючим g і пов'язаним з рухомим об'єктом базисами b , взаємне положення яких задано кутами магнітного курсу м , диференту і крену : м м xc cos cos м sin sin sin м cos sin м sin sin cos м sin cos yc cos sin м cos cos м sin zc sin cos м cos sin sin м sin sin м cos sin cos м cos cos Cbg Компоненти вектора T в результаті мають вигляд: X Hcos м sin sin sin м cos Zg cos sin , Y H cos м cos Zg sin , Z H sin м sin cos м cos sin Zg cos cos . Магнітний курс пов'язаний з істинним курсом співвідношенням м D , де D - магнітне схилення. На фіг. 1 зображені кути і системи координат. Складові T вимірюють тривісним магнітометром, ~ вектор вихідних сигналів якого позначимо T . Напрямні косинуси (3) визначають за показаннями гірогоризонткомпаса з урахуванням магнітного схилення D , що визначається з карт або таблиць МПЗ. Складові МПЗ можна легко визначити, наприклад, за допомогою калькулятора National Geophisical Data Centre. Для цього необхідна інформація про координати об'єкта, яка може бути отримана від супутникового приймача. У результаті від (2) перейдемо до співвідношення ~ ~~ T CTg FCTg M FT M . (4) Хвилею в цьому виразі відзначені виміряні або обчислені значення. Таким чином, отримаємо різницю ~ ~~ T CTg . При русі об'єкта в процесі хитавиці або циркуляції знімаємо ряд значень i FTi M , (5) де i - номер вимірювання. При кількості вимірювань i 1n X Xn X1 Xn a b c P i Y Yn Y1 Yn d e f Q i Z Zn Z1 Zn g h k R i 11 . (6) Введемо позначення матриць Xi Xn X1 Xn a b c P Y Yn B Y1 Yn , S d e f Q, A i . Zi Zn Z1 Zn g h k R 11 Тоді (6) в компактному вигляді буде B S A . Скористаємося методом найменших квадратів (МНК) в пакетній формі [4] 1 S B A B AT A AT , A A 1 T T де матриця A A називається псевдооберненою, або в іншій формі [3] 1 ST NTN NTBT , де N AT . 5 У результаті знайдемо оцінки параметрів Пуа ссона S , які відповідають матриці параметрів S . Для повної оцінки всіх параметрів рух корабля має бути просторовим, тобто хитавиця повинна бути як мінімум двовісною або ж одновісну качку слід доповнити циркуляцією. Для виконання оцінки необхідні як мінімум 4 кроки вимірювань. Крок вимірювань в часі має величину одиниць секунд. Випадковість хитавиці сприяє підвищенню якості оцінки. Збільшення кількості вимірювань сприяє згладжування впливу випадкових помилок вимірників. Розглянемо шляхом моделювання, як точно можна визначити девіацію за таких оцінок. Розрахуємо девіацію за формулою [5] X cos Z sin м arctg X sin Z cos sin Y cos . (7) Потім розрахуємо девіацію 1 за такою ж формулою, де замість складових магнітного поля об'єкта (1) використовуємо складові з оцінками параметрів Пуассона: Комп’ютерна верстка І. Скворцова 66083 6 X X aX bY cZ P, Y Y dX eY f Z Q, Z Z gX hY kZ R. У результаті отримаємо похибку оцінки девіа 1 (Фіг. 2). ції Джерела інформації: 1. Воронов В. В., Григорьев Н. Н., Яловенко А. В. Магнитные компасы. - СПб.: "Элмор", 2004.-188 с. 2. Патент PФ N2096818,G05D 1/08,1997. 3. Сейдж С, Меле Дж. Теория оценивания и еѐ применение в связи и управлении. - М.: Связь, 1976.-496с 4. Мелешко В. В., Нестеренко О. И. Бесплатформенные инерциальные навигационные системы. Учебное пособие. - Кировоград: ПОЛИМЕД Сервис, 2011.-172с. 5. Одинцов А. А., Мелешко В. В., Шаров С. А. Ориентация объектов в магнитном поле Земли. Киев.: "Корнийчук", 2008.-160 с. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of poisson magnetic parameters
Автори англійськоюMeleshko Vladyslav Valentynovych, Meleshko Oleksdandr Yuriiovych
Назва патенту російськоюСпособ определения магнитных параметров пуассона
Автори російськоюМелешко Владислав Валентинович, Костюк Александр Юрьевич
МПК / Мітки
МПК: G01C 17/00
Мітки: пуассона, магнітних, визначення, параметрів, спосіб
Код посилання
<a href="https://ua.patents.su/3-66083-sposib-viznachennya-magnitnikh-parametriv-puassona.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення магнітних параметрів пуассона</a>
Спосіб визначення коефіцієнта пуассона
Номер патенту: 93248
Опубліковано: 25.01.2011
Автори: Юркова Олександра Іванівна, Мільман Юлій Вікторович, Дудник Олексій Олегович, Бякова Олександра Вікторівна, Власов Андрій Олексійович
Мітки: коефіцієнта, визначення, пуассона, спосіб
Формула / Реферат:
Спосіб визначення коефіцієнта Пуассона m, який включає визначення модуля Юнга Е, який відрізняється тим, що випробуваний матеріал піддають індентуванню твердим індентором у вигляді правильної піраміди при безперервному вдавленні з побудовою діаграми "навантаження - переміщення індентора", по якій визначають характеристику пластичності dA, як відношення площі між гілками навантаження - розвантаження до загальної площі під кривою...
Спосіб визначення кута виходу вектора намагніченості в тонких магнітних плівках
Номер патенту: 32698
Опубліковано: 15.02.2001
Автори: Ушакова Тетяна Станіславівна, Карпенко Микола Іванович, Моісеєнко Олександр Володимирович
МПК: G01R 33/04
Мітки: визначення, вектора, магнітних, виходу, тонких, намагніченості, кута, плівках, спосіб
Формула / Реферат:
Спосіб визначення кута виходу вектора намагніченості в тонких магнітних плівках, що включає пропускання через плівку лінійно-поляризованого світла, обертання плівки і реєстрацію зміни світлового сигналу, який відрізняється тим, що плівку обертають як у площині її розташування, так і під кутом до напряму поширення світла, а кут виходу вектора намагніченості визначають у момент максимальної інтенсивності світла, що пройшло через плівку, за...
Спосіб визначення основних параметрів, а саме концентрації і рухливості неосновних носіїв заряду в твердих тілах
Номер патенту: 87695
Опубліковано: 10.08.2009
Автор: Угрин Юрій Орестович
МПК: G01R 31/26, H01L 21/66
Мітки: параметрів, носіїв, спосіб, неосновних, визначення, твердих, концентрації, заряду, тілах, рухливості, основних
Формула / Реферат:
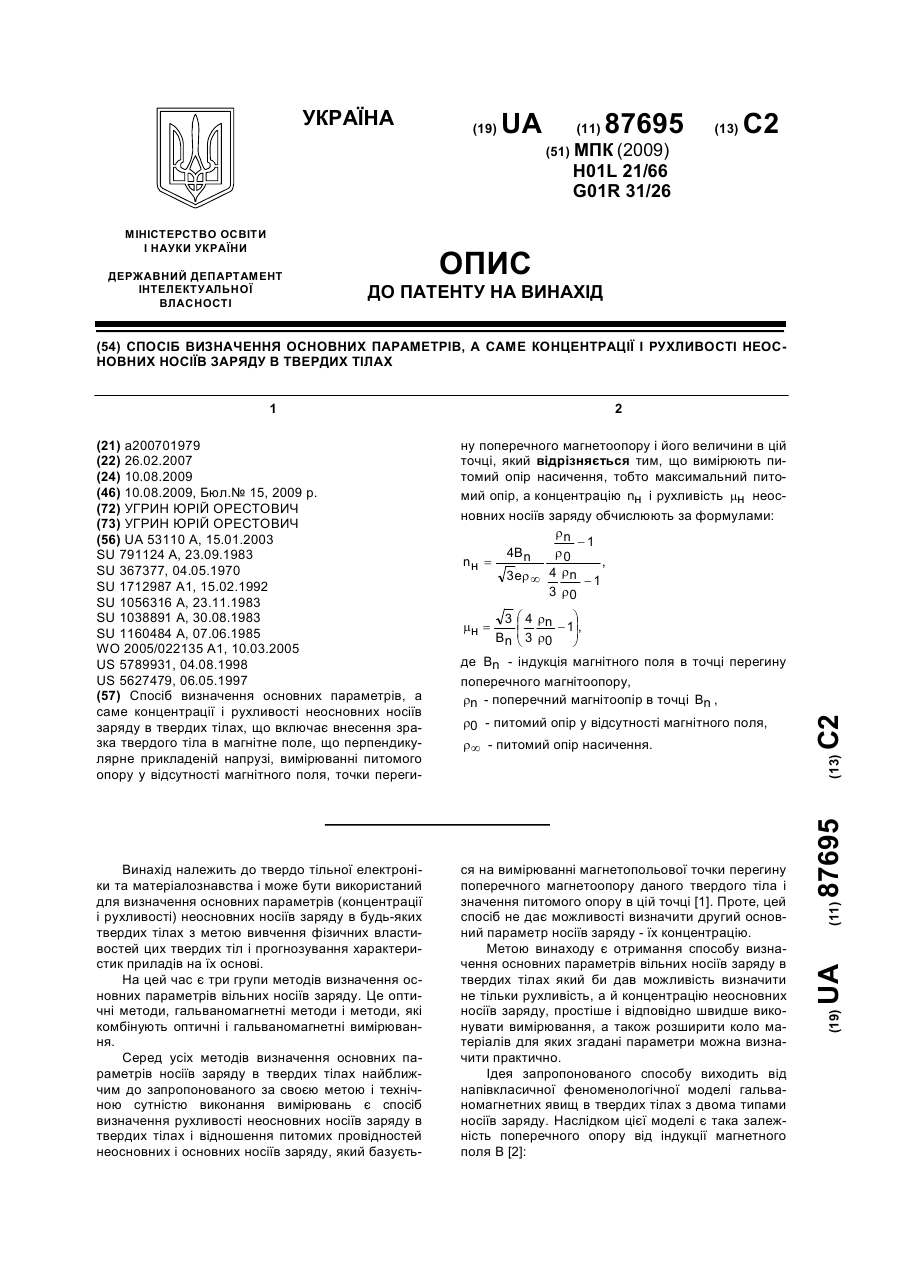
Спосіб визначення основних параметрів, а саме концентрації і рухливості неосновних носіїв заряду в твердих тілах, що включає внесення зразка твердого тіла в магнітне поле, що перпендикулярне прикладеній напрузі, вимірюванні питомого опору у відсутності магнітного поля, точки перегину поперечного магнетоопору і його величини в цій точці, який відрізняється тим, що вимірюють питомий опір насичення, тобто максимальний питомий опір, а...
Спосіб визначення магнітних властивостей магнітних матеріалів
Номер патенту: 43616
Опубліковано: 17.12.2001
Автори: Погорілий Анатолій Миколайович, Журавльов Анатолій Хомич, Погорєлов Євген Олександрович, Шипіль Олена Вадимівна
МПК: G01N 27/72, G01R 33/12
Мітки: магнітних, спосіб, визначення, властивостей, матеріалів
Формула / Реферат:
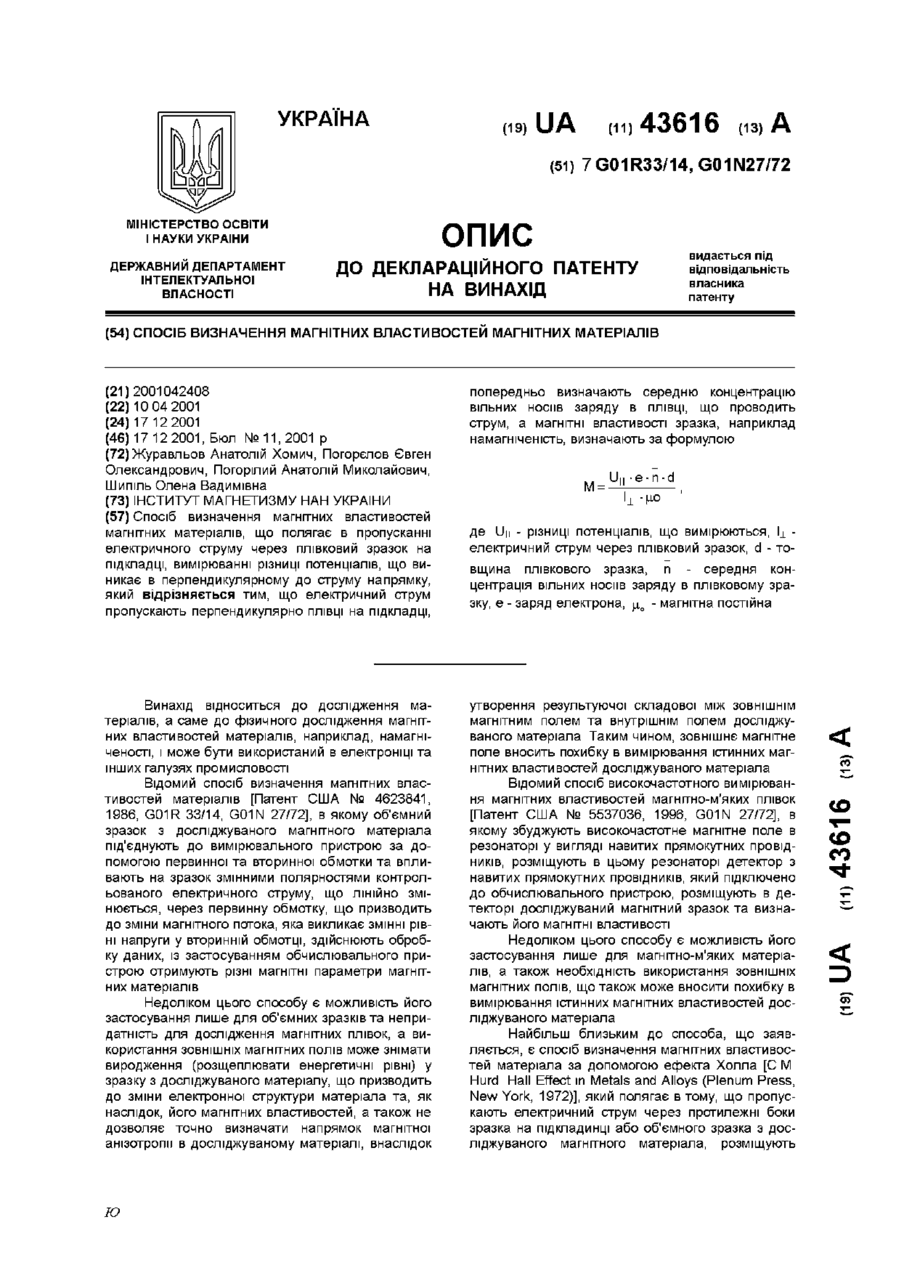
Спосіб визначення магнітних властивостей магнітних матеріалів, що полягає в пропусканні електричного струму через плівковий зразок на підкладці, вимірюванні різниці потенціалів, що виникає в перпендикулярному до струму напрямку, який відрізняється тим, що електричний струм пропускають перпендикулярно плівці на підкладці, попередньо визначають середню концентрацію вільних носіїв заряду в плівці, що проводить струм, а магнітні властивості...
Пристрій для визначення параметрів електромагнітної емісії матеріалів
Номер патенту: 59220
Опубліковано: 10.05.2011
Автори: Астанін В'ячеслав Валентинович, Щегель Ганна Олексіївна
МПК: G01N 27/72, G01N 3/30
Мітки: матеріалів, пристрій, електромагнітної, емісії, визначення, параметрів
Формула / Реферат:
Пристрій для визначення параметрів електромагнітної емісії матеріалів, що містить блок реєстрації зміни параметрів електромагнітного поля, блок підсилення зареєстрованого сигналу, який відрізняється тим, що пристрій виконаний із блоком обробки і збереження отриманих даних, блоком управління пристроєм, блоком живлення, а блок реєстрації зміни параметрів електромагнітного поля виконаний доповненим блоком задання початкового магнітного поля,...
Попередній патент: Мітчик
Наступний патент: Система аварійного захисту гідроприводу
Випадковий патент: Упаковані стрічки, а також способи і пристрій для пакування вказаних стрічок