Корпус апарата
Номер патенту: 73850
Опубліковано: 15.09.2005
Автори: Довгий Станіслав Олексійович, Поліщук Сергій Володимирович, Мороз Володимир Васильович, Бабенко Віктор Вітальйович
Формула / Реферат
Корпус апарата, що містить носову та кормову частини обтічної форми, який відрізняється тим, що в прорізі кормової частини розміщене рухоме крило, яке з'єднане із встановленим на корпусі сердечником соленоїда, нижня частина кормової частини виконана у вигляді висувних лівого і правого поплавків, що жорстко з'єднані з ножами, скріпленими з фігурними важелями, що здатні переміщуватися в поперечному напрямку в розташованих в крилі коробах та з'єднані з рейками, розміщеними в розташованих в крилі напрямних з можливістю зчеплення з зубчастим колесом, з’єднаним з валом електродвигуна обертального руху.
Текст
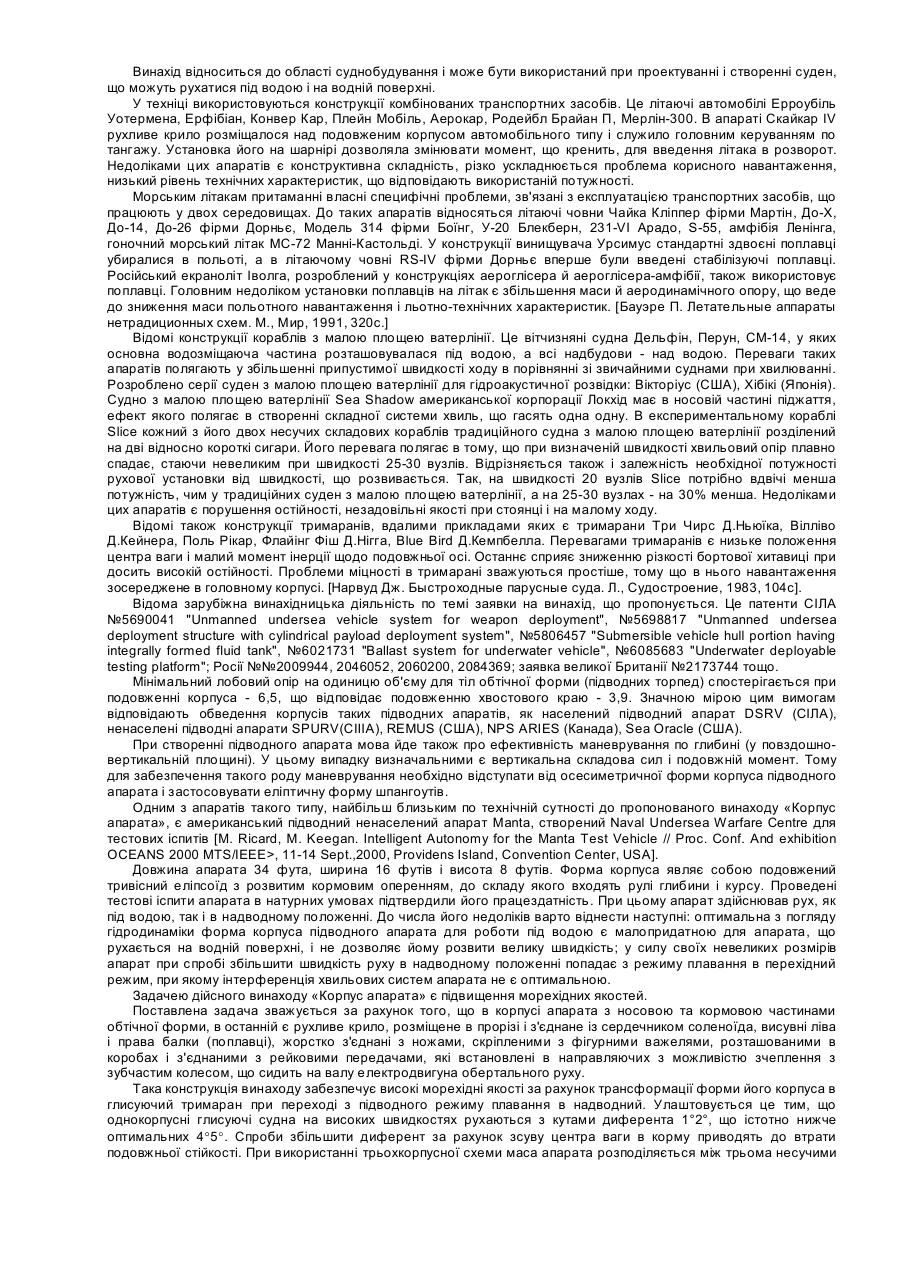
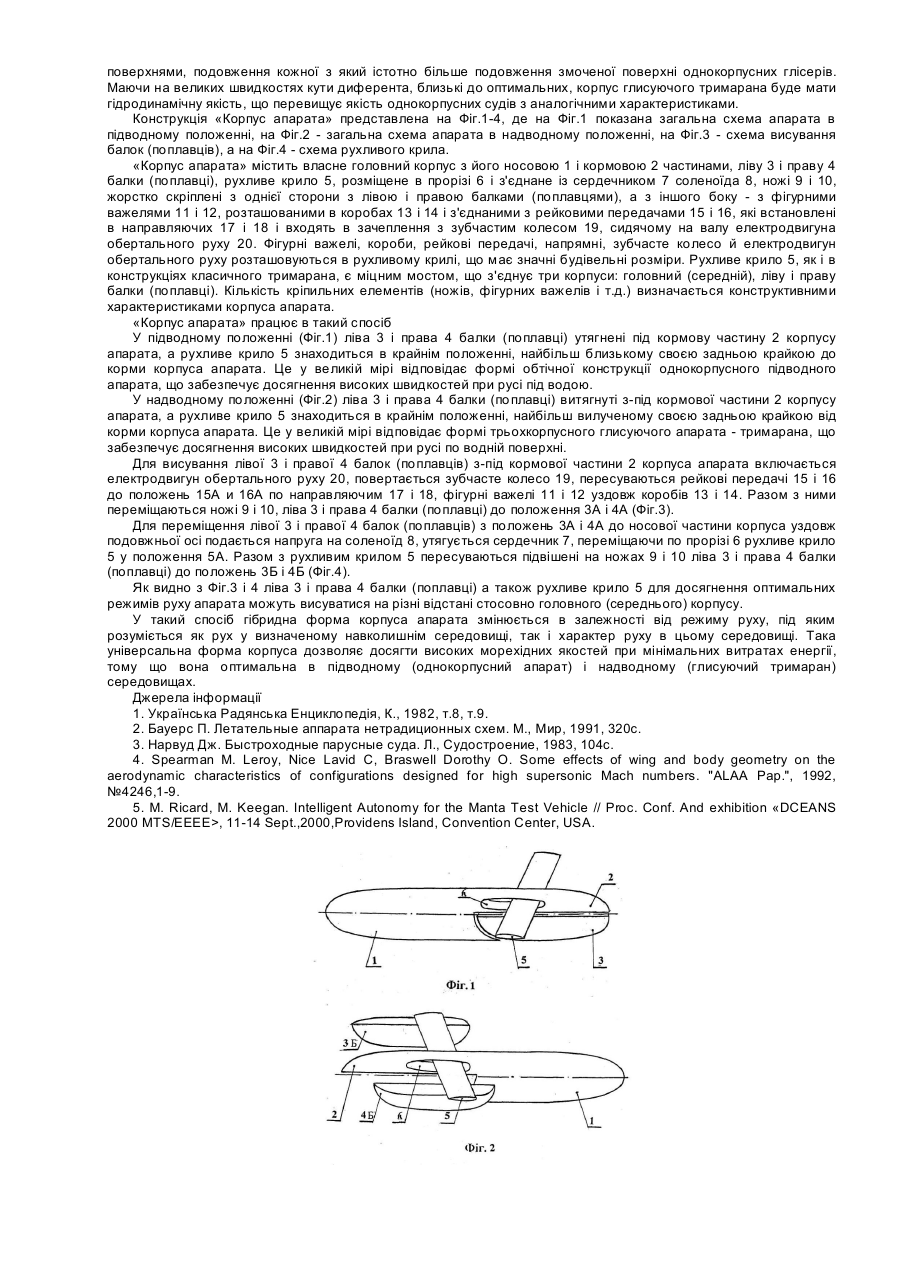
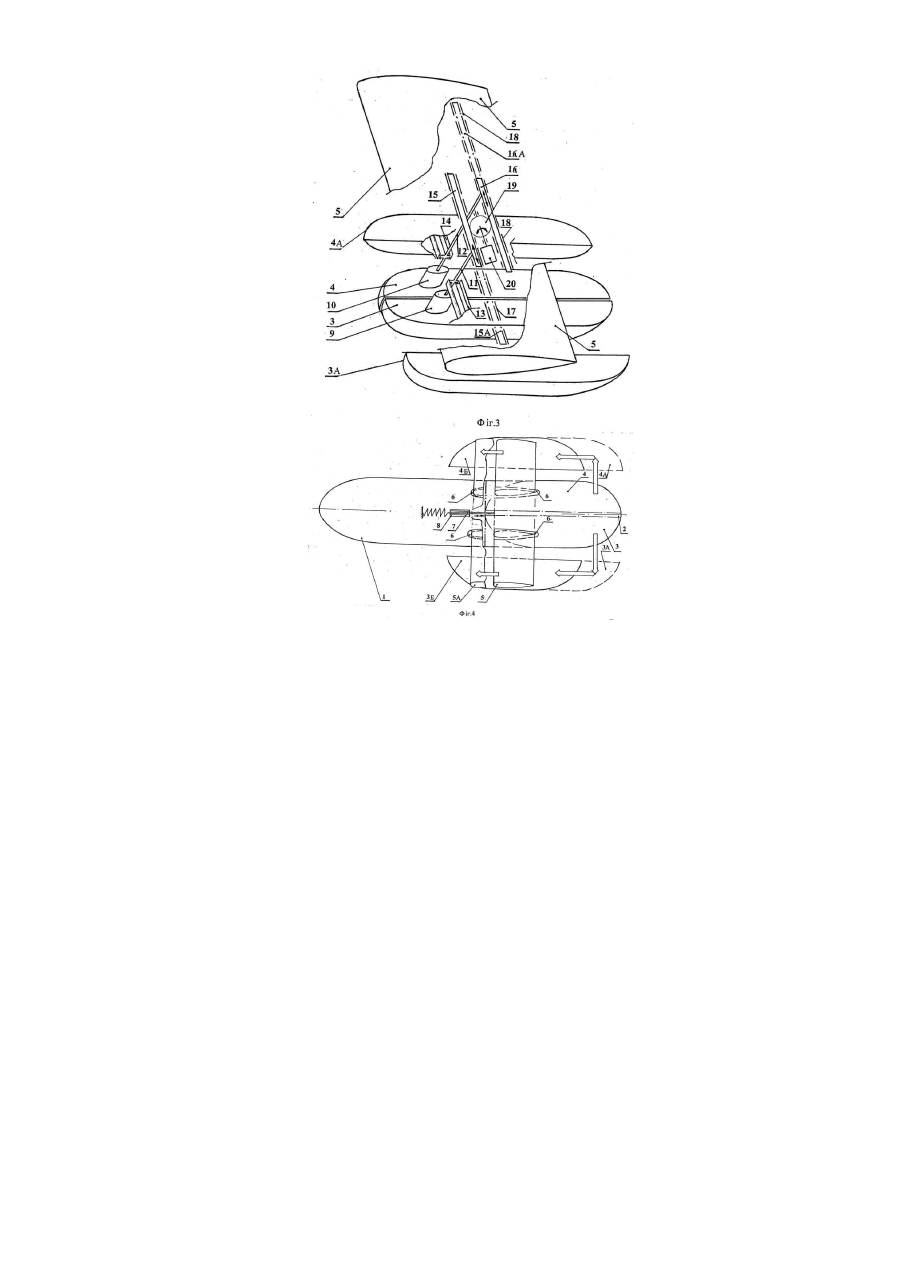
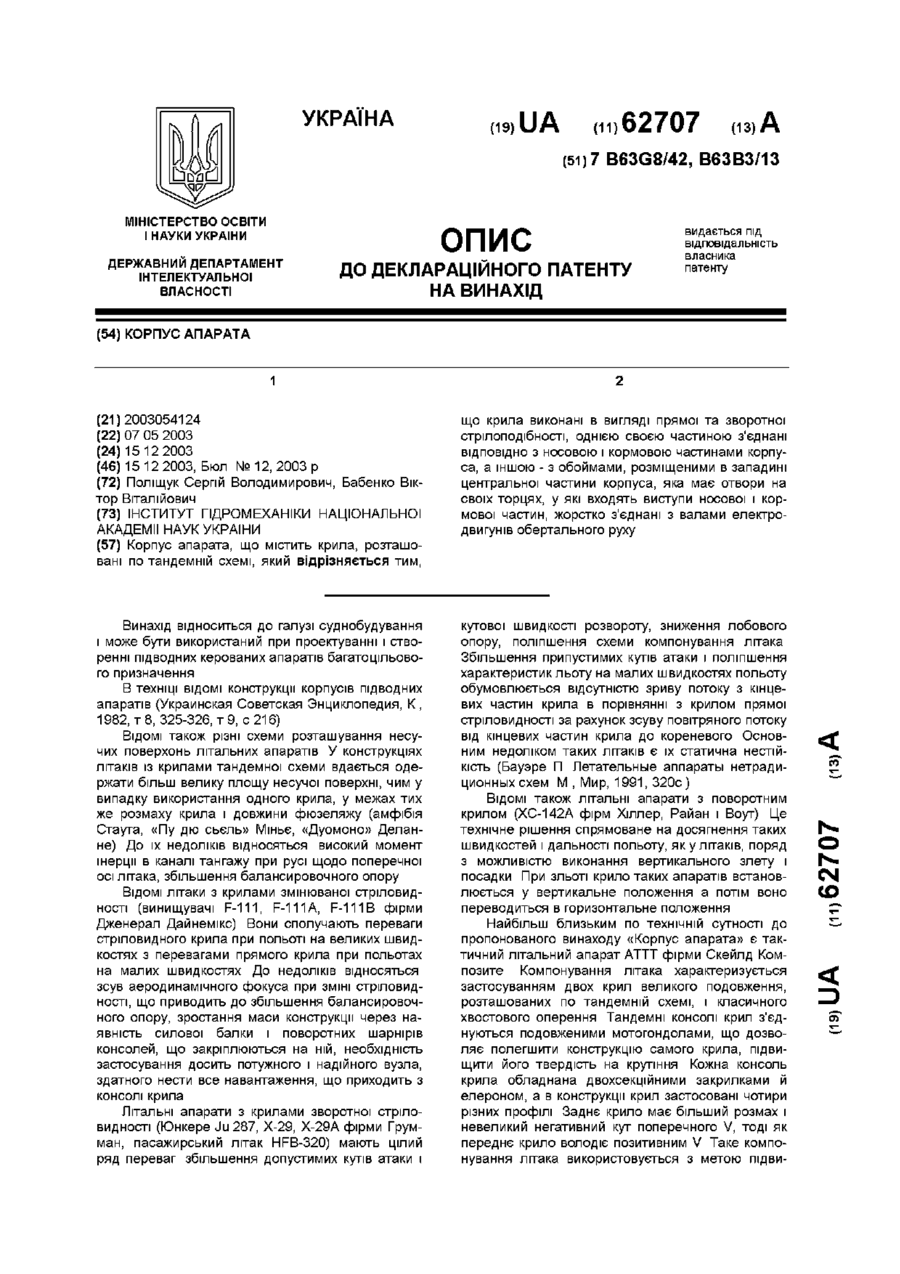
Винахід відноситься до області суднобудування і може бути використаний при проектуванні і створенні суден, що можуть рухатися під водою і на водній поверхні. У техніці використовуються конструкції комбінованих транспортних засобів. Це літаючі автомобілі Ерроубіль Уотермена, Eрфібіан, Конвер Кар, Плейн Мобіль, Аерокар, Родейбл Брайан П, Мерлін-300. В апараті Скайкар IV рухливе крило розміщалося над подовженим корпусом автомобільного типу і служило головним керуванням по тангажу. Установка його на шарнірі дозволяла змінювати момент, що кренить, для введення літака в розворот. Недоліками цих апаратів є конструктивна складність, різко ускладнюється проблема корисного навантаження, низький рівень технічних характеристик, що відповідають використаній потужності. Морським літакам притаманні власні специфічні проблеми, зв'язані з експлуатацією транспортних засобів, що працюють у двох середовищах. До таких апаратів відносяться літаючі човни Чайка Кліппер фірми Мартін, До-Х, До-14, До-26 фірми Дорньє, Модель 314 фірми Боїнг, У-20 Блекберн, 231-VI Арадо, S-55, амфібія Ленінга, гоночний морський літак МС-72 Манні-Кастольді. У конструкції винищувача Урсимус стандартні здвоєні поплавці убиралися в польоті, а в літаючому човні RS-IV фірми Дорньє вперше були введені стабілізуючі поплавці. Російський екраноліт Іволга, розроблений у конструкціях аероглісера й аероглісера-амфібії, також використовує поплавці. Головним недоліком установки поплавців на літак є збільшення маси й аеродинамічного опору, що веде до зниження маси польотного навантаження і льотно-технічних характеристик. [Бауэре П. Летательные аппараты нетрадиционных схем. М., Мир, 1991, 320с.] Відомі конструкції кораблів з малою площею ватерлінії. Це вітчизняні судна Дельфін, Перун, CM-14, у яких основна водозміщаюча частина розташовувалася під водою, а всі надбудови - над водою. Переваги таких апаратів полягають у збільшенні припустимої швидкості ходу в порівнянні зі звичайними суднами при хвилюванні. Розроблено серії суден з малою площею ватерлінії для гідроакустичної розвідки: Вікторіус (США), Хібікі (Японія). Судно з малою площею ватерлінії Sea Shadow американської корпорації Локхід має в носовій частині піджаття, ефект якого полягає в створенні складної системи хвиль, що гасять одна одну. В експериментальному кораблі Slice кожний з його двох несучих складових кораблів традиційного судна з малою площею ватерлінії розділений на дві відносно короткі сигари. Його перевага полягає в тому, що при визначеній швидкості хвильовий опір плавно спадає, стаючи невеликим при швидкості 25-30 вузлів. Відрізняється також і залежність необхідної потужності рухової установки від швидкості, що розвивається. Так, на швидкості 20 вузлів Slice потрібно вдвічі менша потужність, чим у традиційних суден з малою площею ватерлінії, а на 25-30 вузлах - на 30% менша. Недоліками цих апаратів є порушення остійності, незадовільні якості при стоянці і на малому ходу. Відомі також конструкції тримаранів, вдалими прикладами яких є тримарани Три Чирс Д.Ньюїка, Вілліво Д.Кейнера, Поль Рікар, Флайінг Фіш Д.Нігга, Blue Bird Д.Кемпбелла. Перевагами тримаранів є низьке положення центра ваги і малий момент інерції щодо подовжньої осі. Останнє сприяє зниженню різкості бортової хитавиці при досить високій остійності. Проблеми міцності в тримарані зважуються простіше, тому що в нього навантаження зосереджене в головному корпусі. [Нарвуд Дж. Быстроходные парусные суда. Л., Судостроение, 1983, 104с]. Відома зарубіжна винахідницька діяльність по темі заявки на винахід, що пропонується. Це патенти СІЛА №5690041 "Unmanned undersea vehicle system for weapon deployment", №5698817 "Unmanned undersea deployment structure with cylindrical payload deployment system", №5806457 "Submersible vehicle hull portion having integrally formed fluid tank", №6021731 "Ballast system for underwater vehicle", №6085683 "Underwater deployable testing platform"; Росії №№2009944, 2046052, 2060200, 2084369; заявка великої Британії №2173744 тощо. Мінімальний лобовий опір на одиницю об'єму для тіл обтічної форми (підводних торпед) спостерігається при подовженні корпуса - 6,5, що відповідає подовженню хвостового краю - 3,9. Значною мірою цим вимогам відповідають обведення корпусів таких підводних апаратів, як населений підводний апарат DSRV (СІЛА), ненаселені підводні апарати SPURV(CIIIA), REMUS (США), NPS ARIES (Канада), Sea Oracle (США). При створенні підводного апарата мова йде також про ефективність маневрування по глибині (у повздошновертикальній площині). У цьому випадку визначальними є вертикальна складова сил і подовжній момент. Тому для забезпечення такого роду маневрування необхідно відступати від осесиметричної форми корпуса підводного апарата і застосовувати еліптичну форму шпангоутів. Одним з апаратів такого типу, найбільш близьким по технічній сутності до пропонованого винаходу «Корпус апарата», є американський підводний ненаселений апарат Manta, створений Naval Undersea Warfare Centre для тестових іспитів [М. Ricard, M. Keegan. Intelligent Autonomy for the Manta Test Vehicle // Proc. Conf. And exhibition OCEANS 2000 MTS/IEEE>, 11-14 Sept.,2000, Providens Island, Convention Center, USA]. Довжина апарата 34 фута, ширина 16 футів і висота 8 футів. Форма корпуса являє собою подовжений тривісний еліпсоїд з розвитим кормовим оперенням, до складу якого входять рулі глибини і курсу. Проведені тестові іспити апарата в натурних умовах підтвердили його працездатність. При цьому апарат здійснював рух, як під водою, так і в надводному положенні. До числа його недоліків варто віднести наступні: оптимальна з погляду гідродинаміки форма корпуса підводного апарата для роботи під водою є малопридатною для апарата, що рухається на водній поверхні, і не дозволяє йому розвити велику швидкість; у силу своїх невеликих розмірів апарат при спробі збільшити швидкість руху в надводному положенні попадає з режиму плавання в перехідний режим, при якому інтерференція хвильових систем апарата не є оптимальною. Задачею дійсного винаходу «Корпус апарата» є підвищення морехідних якостей. Поставлена задача зважується за рахунок того, що в корпусі апарата з носовою та кормовою частинами обтічної форми, в останній є рухливе крило, розміщене в прорізі і з'єднане із сердечником соленоїда, висувні ліва і права балки (поплавці), жорстко з'єднані з ножами, скріпленими з фігурними важелями, розташованими в коробах і з'єднаними з рейковими передачами, які встановлені в направляючих з можливістю зчеплення з зубчастим колесом, що сидить на валу електродвигуна обертального руху. Така конструкція винаходу забезпечує високі морехідні якості за рахунок трансформації форми його корпуса в глисуючий тримаран при переході з підводного режиму плавання в надводний. Улаштовується це тим, що однокорпусні глисуючі судна на високих швидкостях рухаються з кутами диферента 1°2°, що істотно нижче оптимальних 4°5°. Спроби збільшити диферент за рахунок зсуву центра ваги в корму приводять до втрати подовжньої стійкості. При використанні трьохкорпусної схеми маса апарата розподіляється між трьома несучими поверхнями, подовження кожної з який істотно більше подовження змоченої поверхні однокорпусних глісерів. Маючи на великих швидкостях кути диферента, близькі до оптимальних, корпус глисуючого тримарана буде мати гідродинамічну якість, що перевищує якість однокорпусних судів з аналогічними характеристиками. Конструкція «Корпус апарата» представлена на Фіг.1-4, де на Фіг.1 показана загальна схема апарата в підводному положенні, на Фіг.2 - загальна схема апарата в надводному положенні, на Фіг.3 - схема висування балок (поплавців), а на Фіг.4 - схема рухливого крила. «Корпус апарата» містить власне головний корпус з його носовою 1 і кормовою 2 частинами, ліву 3 і праву 4 балки (поплавці), рухливе крило 5, розміщене в прорізі 6 і з'єднане із сердечником 7 соленоїда 8, ножі 9 і 10, жорстко скріплені з однієї сторони з лівою і правою балками (поплавцями), а з іншого боку - з фігурними важелями 11 і 12, розташованими в коробах 13 і 14 і з'єднаними з рейковими передачами 15 і 16, які встановлені в направляючих 17 і 18 і входять в зачеплення з зубчастим колесом 19, сидячому на валу електродвигуна обертального руху 20. Фігурні важелі, короби, рейкові передачі, напрямні, зубчасте колесо й електродвигун обертального руху розташовуються в рухливому крилі, що має значні будівельні розміри. Рухливе крило 5, як і в конструкціях класичного тримарана, є міцним мостом, що з'єднує три корпуси: головний (середній), ліву і праву балки (поплавці). Кількість кріпильних елементів (ножів, фігурних важелів і т.д.) визначається конструктивними характеристиками корпуса апарата. «Корпус апарата» працює в такий спосіб У підводному положенні (Фіг.1) ліва 3 і права 4 балки (поплавці) утягнені під кормову частину 2 корпусу апарата, а рухливе крило 5 знаходиться в крайнім положенні, найбільш близькому своєю задньою крайкою до корми корпуса апарата. Це у великій мірі відповідає формі обтічної конструкції однокорпусного підводного апарата, що забезпечує досягнення високих швидкостей при русі під водою. У надводному положенні (Фіг.2) ліва 3 і права 4 балки (поплавці) витягнуті з-під кормової частини 2 корпусу апарата, а рухливе крило 5 знаходиться в крайнім положенні, найбільш вилученому своєю задньою крайкою від корми корпуса апарата. Це у великій мірі відповідає формі трьохкорпусного глисуючого апарата - тримарана, що забезпечує досягнення високих швидкостей при русі по водній поверхні. Для висування лівої 3 і правої 4 балок (поплавців) з-під кормової частини 2 корпуса апарата включається електродвигун обертального руху 20, повертається зубчасте колесо 19, пересуваються рейкові передачі 15 і 16 до положень 15А и 16А по направляючим 17 і 18, фігурні важелі 11 і 12 уздовж коробів 13 і 14. Разом з ними переміщаються ножі 9 і 10, ліва 3 і права 4 балки (поплавці) до положення 3А і 4А (Фіг.3). Для переміщення лівої 3 і правої 4 балок (поплавців) з положень 3А і 4А до носової частини корпуса уздовж подовжньої осі подається напруга на соленоїд 8, утягується сердечник 7, переміщаючи по прорізі 6 рухливе крило 5 у положення 5А. Разом з рухливим крилом 5 пересуваються підвішені на ножах 9 і 10 ліва 3 і права 4 балки (поплавці) до положень 3Б і 4Б (Фіг.4). Як видно з Фіг.3 і 4 ліва 3 і права 4 балки (поплавці) а також рухливе крило 5 для досягнення оптимальних режимів руху апарата можуть висуватися на різні відстані стосовно головного (середнього) корпусу. У такий спосіб гібридна форма корпуса апарата змінюється в залежності від режиму руху, під яким розуміється як рух у визначеному навколишнім середовищі, так і характер руху в цьому середовищі. Така універсальна форма корпуса дозволяє досягти високих морехідних якостей при мінімальних витратах енергії, тому що вона оптимальна в підводному (однокорпусний апарат) і надводному (глисуючий тримаран) середовищах. Джерела інформації 1. Українська Радянська Енциклопедія, К., 1982, т.8, т.9. 2. Бауерс П. Летательные аппарата нетрадиционных схем. М., Мир, 1991, 320с. 3. Нарвуд Дж. Быстроходные парусные суда. Л., Судостроение, 1983, 104с. 4. Spearman М. Leroy, Nice Lavid С, Braswell Dorothy O. Some effects of wing and body geometry on the aerodynamic characteristics of configurations designed for high supersonic Mach numbers. "ALAA Pap.", 1992, №4246,1-9. 5. M. Ricard, M. Keegan. Intelligent Autonomy for the Manta Test Vehicle // Proc. Conf. And exhibition «DCEANS 2000 MTS/EEEE>, 11-14 Sept.,2000,Providens Island, Convention Center, USA.
ДивитисяДодаткова інформація
Назва патенту англійськоюVessel hull
Автори англійськоюDovhyi Stanislav Oleksiiovych, Polischuk Serhii Volodymyrovych
Назва патенту російськоюКорпус аппарата
Автори російськоюДовгий Станислав Алексеевич, Полищук Сергей Владимирович
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/3-73850-korpus-aparata.html" target="_blank" rel="follow" title="База патентів України">Корпус апарата</a>
Корпус апарата
Номер патенту: 62707
Опубліковано: 15.12.2003
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Формула / Реферат:
Корпус апарата, що містить крила, розташовані по тандемній схемі, який відрізняється тим, що крила виконані в вигляді прямої та зворотної стрілоподібності, однією своєю частиною з'єднані відповідно з носовою і кормовою частинами корпуса, а іншою - з обоймами, розміщеними в западині центральної частини корпуса, яка має отвори на своїх торцях, у які входять виступи носової і кормової частин, жорстко з'єднані з валами електродвигунів...
Корпус апарата
Номер патенту: 46638
Опубліковано: 15.05.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
МПК: B63B 3/13, B63H 23/00
Формула / Реферат:
Корпус апарата з нерухомими нижніми крилами і рухомими верхніми крилами, який відрізняється тим, що рухомі верхні крила встановлені з можливістю їх переміщення у виїмці корпусу апарата, в якому, як і у тілі нижніх крил, розміщені електродвигуни поворотного типу, на осях яких жорстко закріплені тяги, шарнірно з'єднані з верхніми рухомими крилами.
Корпус апарата
Номер патенту: 50589
Опубліковано: 15.10.2002
Автори: Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
Формула / Реферат:
Корпус апарата, що має крила, які рознесені по висоті і горизонталі, який відрізняється тим, що крила встановлені на корпусі з можливістю їх пересування в горизонтальній площині, при цьому кожне з крил жорстко з'єднане з відповідною тягою з поперечиною, яка входить в обойму, а кінцеві частини тяг з'єднані з ланками ланцюгових передач, що провертаються на зубчатих колесах, закріплених на осях електродвигунів поворотного типу.
Корпус апарата
Номер патенту: 46639
Опубліковано: 15.05.2002
Автори: Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
МПК: B63B 3/13, B63H 23/00
Формула / Реферат:
Корпус апарата з встановленими з можливістю переміщення консолями крил, який відрізняється тим, що останні з’єднані з корпусом за допомогою кривошипно-шатунного механізму, причому кожна з консолей послідовно жорстко скріплена з відповідною віссю електродвигуна, розміщеного в корпусі з можливістю її несинхронного переміщення.
Корпус апарата
Номер патенту: 29634
Опубліковано: 15.11.2000
Автори: Бабенко Віктор Вітальович, Поліщук Сергій Володимирович, Коробов Віталій Ілліч
Текст:
...с повернутыми (по часовой стрелке) на угол менее 90° верхним и на угол более 90° нижним поворотно-скользящими крыльями относительно продольной оси подводного аппарата. Устройство содержит собственно корпус 1 подводного управляемого аппарата с встроенными в нем электродвигателями поворотного типа 2 и 3, вертикально расположенные выходные оси которых соответственно 4 и 5 соединены с верхним 6 и нижним 7 поворотно-скользящими крыльями с...
Попередній патент: Спосіб захисту рослин від ураження патогенами
Наступний патент: Підставка тигля для вирощування монокристалів корунду
Випадковий патент: Спосіб визначення оптимального зусилля натягнення волокнистого наповнювача при просочуванні