Спосіб захисту підіймальної машини від перевантаження
Номер патенту: 79512
Опубліковано: 25.06.2007
Автори: Дворников Володимир Іванович, Чехлатий Микола Олександрович, Мялковський Валентин Йосипович, Чехлатий Андрій Миколайович
Формула / Реферат
Спосіб захисту підіймальної машини від перевантаження, що включає встановлення транспортної посудини під завантаження, який відрізняється тим, що визначають відстань, пройдену порожньою транспортною посудиною від місця її розвантаження до місця завантаження, шляхом виміру довжини L змотаного з барабана каната, далі фіксують місце розташування транспортної посудини до і після завантаження, визначають зміну довжини каната DL, по якій контролюють рівень завантаження транспортної посудини, запам'ятовують дані вимірів L+DL, надалі піднімають, намотуючи на барабан, канат довжиною L+DL і здійснюють розвантаження транспортної посудини, після чого стирають дані вимірів і повторюють цикл, а при порушенні циклу і повторній подачі під завантаження транспортної посудини, після виміру довжини змотаного з барабана каната L1, проводять порівняння L1 з попередньо запам'ятованими даними L+DL, якщо L1 менше L+DL, то приймають рішення про те, що транспортна посудина завантажена, при цьому формують команду заборони завантаження.
Текст
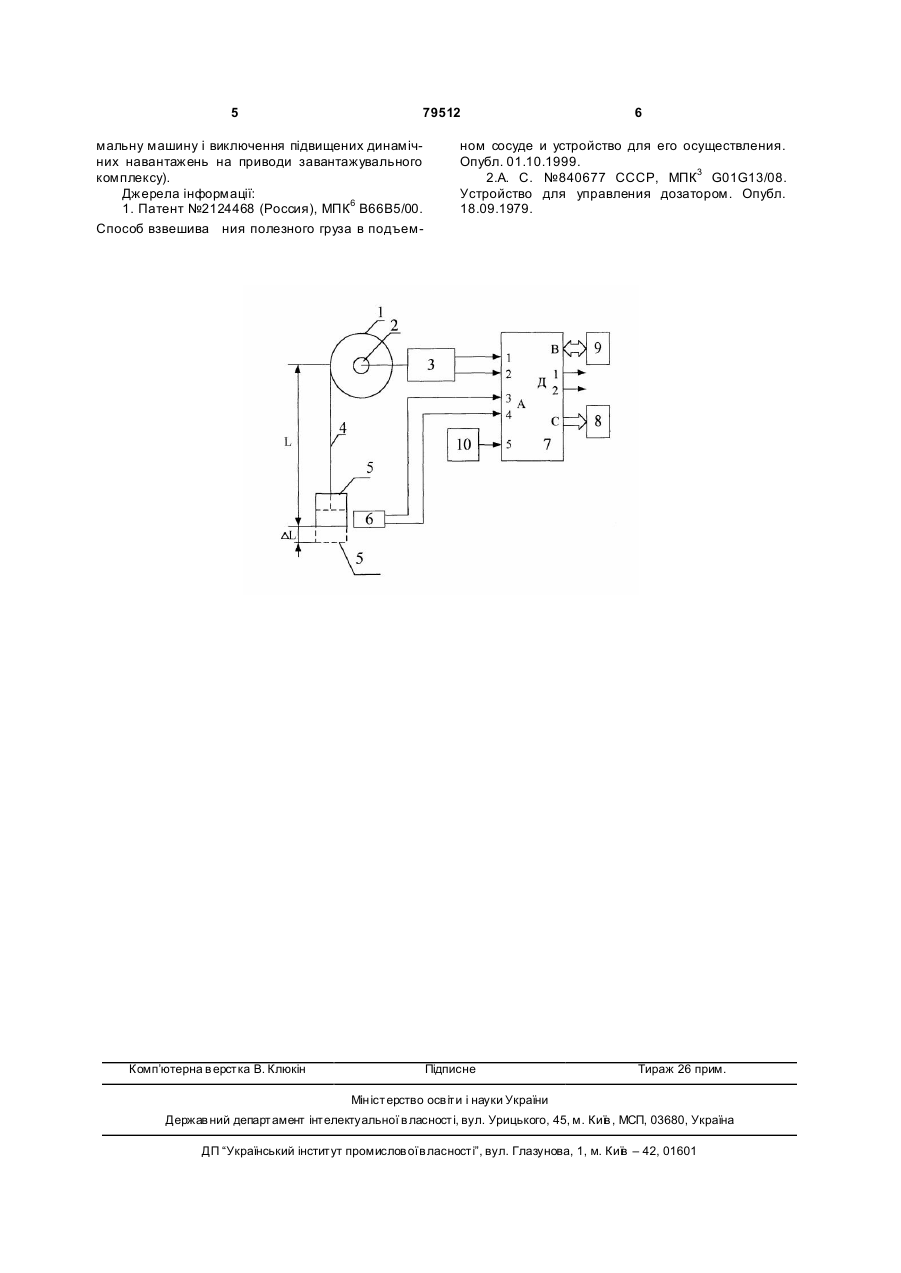
Спосіб захисту підіймальної машини від перевантаження, що включає встановлення транспортної посудини під завантаження, який відрізняється тим, що визначають відстань, пройдену порожньою транспортною посудиною від місця її 3 79512 місця завантаження, шляхом виміру довжини (L) змотаного з барабана канату, потім фіксують місце розташування транспортної судини до і після завантаження, визначають зміну довжини канату (DL ) , запам'ятовують дані вимірів (L + DL) , надалі, підіймають, намотуючи на барабан, канат довжиною (L + DL) і роблять розвантаження транспортної судини, після чого стирають дані вимірів і повторюють цикл, а при порушенні циклу і повторній подачі під завантаження транспортної судини, після виміру довжини каната (L1), проводять порівняння L1 з даними L + DL , які запам'ятовано раніше, і, якщо L1 менше L + DL , то приймають рішення про те, що транспортна посудина завантажена, при цьому формують команду заборони завантаження. Контроль технологічного процесу завантаження розвантаження скіпа при безперервному вимірі довжини каната дозволяє виключити повторне завантаження і захистити підіймальну машину від перевантаження. Крім того, відповідно до винаходу фіксація транспортної судини в необхідному місці дозволить виключити просип гірничої маси у приямок ствола. Винахід, що заявляється, реалізується таким чином. Здійснюють установку транспортної судини під завантаження і визначають відстань, що пройдена порожньою транспортною судиною від місця його розвантаження до місця завантаження, шляхом виміру довжини (L) змотаного з барабана канату та фіксують місце розташування транспортної судини до завантаження. Виконують завантаження транспортної судини гірничою масою. При надходженні необхідної дози визначають зміну довжини каната (DL ) . Запам'ятовують дані вимірів (L + DL) i формують команду переміщення транспортної судини для розвантаження, намотуючи на барабан канат довжиною (L + DL) i роблять розвантаження транспортної судини. Стирають дані вимірів і повторюють цикл. При порушенні циклу і повторній подачі під завантаження транспортної судини після виміру довжини канату L1, змотаного з барабана, проводять порівняння L1 з даними L + DL , які запам'ятовано раніше. Якщо L1 менше L + DL , то приймають рішення про те, що транспортна посудина завантажена, і формують команду заборони завантаження. На кресленні приведена схема пристрою, за допомогою якого реалізується спосіб захисту підіймальної машини від перевантаження. Пристрій містить барабан 1, кінематичне зв'язаний з валом 2 підіймальні машини, датчик 3 виміру довжини каната, канат 4, підіймальна судина 5, датчик 6 переміщення транспортної судини, контролер 7, цифровий індикатор 8, клавіатуру 9, датчик 10 розвантаження транспортної судини. Робота пристрою, за допомогою якого реалізується спосіб захисту підіймальної машини від перевантаження описана нижче. У початковому стані здійснюється калібрування пристрою, для цього переміщають підіймальну 4 судину з місця розвантаження до місця завантаження («Вперед»). При русі підіймальної судини «Вперед» з першого виходу датчика З виміри довжини каната сигнал напрямку, а з другого ви ходу імпульс переміщення надходять на відповідні входи А мікроконтролера 7. У мікроконтролері 7 обчислюється поточна довжина каната 4, змотаного з барабана 1 підіймальної машини, шляхом підрахунку кількості імпульсів і масштабування. При установці транспортної судини 5 під завантаження включається датчик 6 переміщення транспортної судини. З першого виходу датчика 6 переміщення транспортної судини сигнал напрямку, а з другого виходу - імпульс переміщення надходять відповідно на третій і четвертий входи А мікроконтролера 7. У мікроконтролері 7 обчислюється місце розташування транспортної судини шляхом підрахунку імпульсів і масштабування, що надходять з датчика 6 і визначається відстань, пройдене порожньою транспортною судиною, шляхом виміру довжини L змотаного з барабана каната і фіксації місця розташування транспортної судини під завантаженням. На першому виході Д мікроконтролера 7 формується сигнал завантаження транспортної судини. При надходженні необхідної дози гірської маси в транспортну судину відбувається зміна довжини каната на величину DL . Імпульси з виходу да тчика 6 переміщення транспортної судини надходять у мікроконтролер 7, де перетворюються у відповідну довжину DL і на цифровому індикаторі 8 будуть виведені дані вимірів L + DL . На другому виході Д мікроконтролера 7 буде сформований сигнал «Транспортна посудиназавантажена» і буде подана команда його переміщення «Назад». На цифровому індикаторі 8 індицірується поточне значення довжини змотаного з барабана 1 каната 2. Надалі піднімають, намотуючи на барабан канат довжиною (L + DL) i роблять розвантаження транспортної судини. При надходженні сигналу з датчика 10 розвантаження транспортної судини, стираються дані вимірів L + DL . Далі цикл повторюється. У випадку, якщо піднімання транспортної судини 5 було припинено і його повторно подано під завантаження, то, після виміру довжини каната (L1), проводять порівняння L1 з раніше запам'ятованими даними L + DL , якщо L1 менше L + DL тоді мікроконтролер 7 сформує команду, що забороняє завантаження транспортної судини 5. Клавіатура 9 підключається до входу - ви ходу В мікроконтролера і призначена для установки масштабу і коректування показань цифрового індикатора 8. Техніко-економічна ефективність досягається в результаті збільшення пропускної здатності підіймальної машини при інтенсифікації процесів завантаження скіпів і підвищення оперативності керування піднімальною машиною; підвищення надійності і безпеки роботи скіпового підйому при стабілізації навантаження на піднімальну машину і введенні додаткових блокувань; заміни функцій обслуговуючого персоналу скіпового підйому, а в окремих випадках - зменшення числа працюючих; зниження витрат на чищення зумпфів (зменшення просипання гірської маси) і ремонт технологічного устаткування (стабілізація навантаження на підні 5 79512 мальну машину і виключення підвищених динамічних навантажень на приводи завантажувального комплексу). Джерела інформації: 1. Патент №2124468 (Россия), МПК6 В66В5/00. Способ взвешива ния полезного груза в подъем Комп’ютерна в ерстка В. Клюкін 6 ном сосуде и устройство для его осуществления. Опубл. 01.10.1999. 2.А. С. №840677 СССР, МПК3 G01G13/08. Устройство для управления дозатором. Опубл. 18.09.1979. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of protection of hoisting machine against overloading
Автори англійськоюMialkovskyi Valentyn Yosypovych, Dvornykov Volodymyr Ivanovych, Chekhlatyi Andrii Mykolaiovych, Chekhlatyi Mykola Oleksandrovych
Назва патенту російськоюСпособ защиты подъемной машины от перегрузки
Автори російськоюМялковский Валентин Иосифович, Дворников Владимир Иванович, Чехлатый Андрей Николаевич, Чехлатый Николай Александрович
МПК / Мітки
МПК: B66B 5/14, B66C 13/00
Мітки: захисту, машини, спосіб, перевантаження, підіймальної
Код посилання
<a href="https://ua.patents.su/3-79512-sposib-zakhistu-pidijjmalno-mashini-vid-perevantazhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб захисту підіймальної машини від перевантаження</a>
Спосіб захисту електричної машини від струмового перевантаження
Номер патенту: 33607
Опубліковано: 15.05.2002
Автор: Бергал Михайло Юхимович
МПК: H02H 7/085, H02H 3/08
Мітки: перевантаження, струмового, електричної, захисту, машини, спосіб
Формула / Реферат:
Спосіб захисту електричної машини від струмового перевантаження, заснований на вимірі тривалості її імпульсу, порівнянні з заданою величиною і вимкненні електричної машини у момент їх збігу, який відрізняється тим, що при виникненні імпульсу струмового перевантаження тривалістю менше заданої величини його тривалість підсумовують із тривалістю наступних імпульсів, а результат підсумовування порівнюють із заданою величиною, при цьому задають...
Пристрій захисту від напуску каната при застряванні підіймальної посудини у стволі
Номер патенту: 26573
Опубліковано: 11.10.1999
Автори: Матвієнко Микола Павлович, Прохоренко Вадим Олександрович
МПК: B66B 5/12
Мітки: напуску, посудини, підіймальної, пристрій, каната, застряванні, стволі, захисту
Формула / Реферат:
Устройство защиты от напуска каната при застревании подъемного сосуда в стволе, содержащее квантовые генераторы, расположенные на копре, усилители-формирователи, счетчики импульсов и исполнительный орган, отличающееся тем, что в него введены дифференцирующие элементы, при этом выход первого квантового генератора через первый усилитель-формирователь соединен со счетным входом первого счетчика и первым дифференцирующим элементом, выход которого...
Система управління електродвигуном для приводу тросового барабана шахтної підіймальної машини і тросової системи
Номер патенту: 26520
Опубліковано: 11.10.1999
Автори: Шмітт Вінфрід Е., Грінуей Малколм Ернест
МПК: B66B 1/00
Мітки: приводу, машини, барабана, шахтної, управління, підіймальної, електродвигуном, тросового, системі, система, тросової
Формула / Реферат:
1. Система управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы, включающей в себя транспортное средство, поддерживаемое тросом, и образующей колебательную систему, содержащая датчик нагрузки, предназначенный для постоянного контролирования нагрузки на трос и для посылки соответствующего сигнала нагрузки, датчик длины троса, постоянно контролирующий длину троса, сматываемого с тросового...
Пристрій управління запобіжним гальмом підіймальної машини
Номер патенту: 5617
Опубліковано: 28.12.1994
Автори: Григор'єв Валерій Васильович, Бєліков Микола Лаврентійович
МПК: F15B 11/00, B66B 5/16
Мітки: гальмом, пристрій, запобіжним, машини, підіймальної, управління
Текст:
...з'єднана з виходів двохпозиційного трьохлінійного розподільника блоку відпрацювання параметрів першого і другого ступенів галь- 35 мування, згідно з винаходом має функціональний блок швидкості І редукційний клапан, який з'єднаний своїм входом до джерела тиску, а виходом - до входу розподільника блоку відпрацювання 40 параметрів першого І другого ступенів гальмування, сполученного другим своїм виходом о атмосферою І виконаним з...
Гідроопора аварійно-рятувальної пересувної підіймальної машини
Номер патенту: 51947
Опубліковано: 16.12.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21F 11/00
Мітки: підіймальної, машини, гідроопора, аварійно-рятувальної, пересувної
Формула / Реферат:
Гідроопора аварійно-рятувальної пересувної підіймальної машини, що включає гідроциліндр двобічної дії, опорну плиту, яка відрізняється тим, що є частиною конструкції рами, має гідрозамок, який забезпечує фіксацію штока гідроциліндра у заданому положенні, а також має постійно закріплену на штоковій кульовій опорі плиту з пристроєм, що запобігає прокручуванню плити при транспортуванні.
Попередній патент: Куля оніпка
Наступний патент: Спосіб вилуговування бокситу
Випадковий патент: Електромагнітний привід