Спосіб демпфірування кутових швидкостей космічного літального апарата
Номер патенту: 84974
Опубліковано: 10.12.2008
Автори: Задорожня Марія Олександрівна, Кулік Анатолій Степанович, Бандура Іван Миколайович

Формула / Реферат
Спосіб демпфірування кутових швидкостей космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата і, при величині початкової подовжньої кутової швидкості, яка забезпечує заданий час демпфірування, витримують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, здійснюють демпфірування подовжньої кутової швидкості, після чого включають двигуни, які створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, який відрізняється тим, що при величині початкової подовжньої кутової швидкості, яка не забезпечує заданий час демпфірування, забезпечують потрібну подовжню кутову швидкість для виконання заданого часу демпфірування, якщо додаткові витрати менші, ніж економія робочого тіла, а в іншому випадку, спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості.
Текст
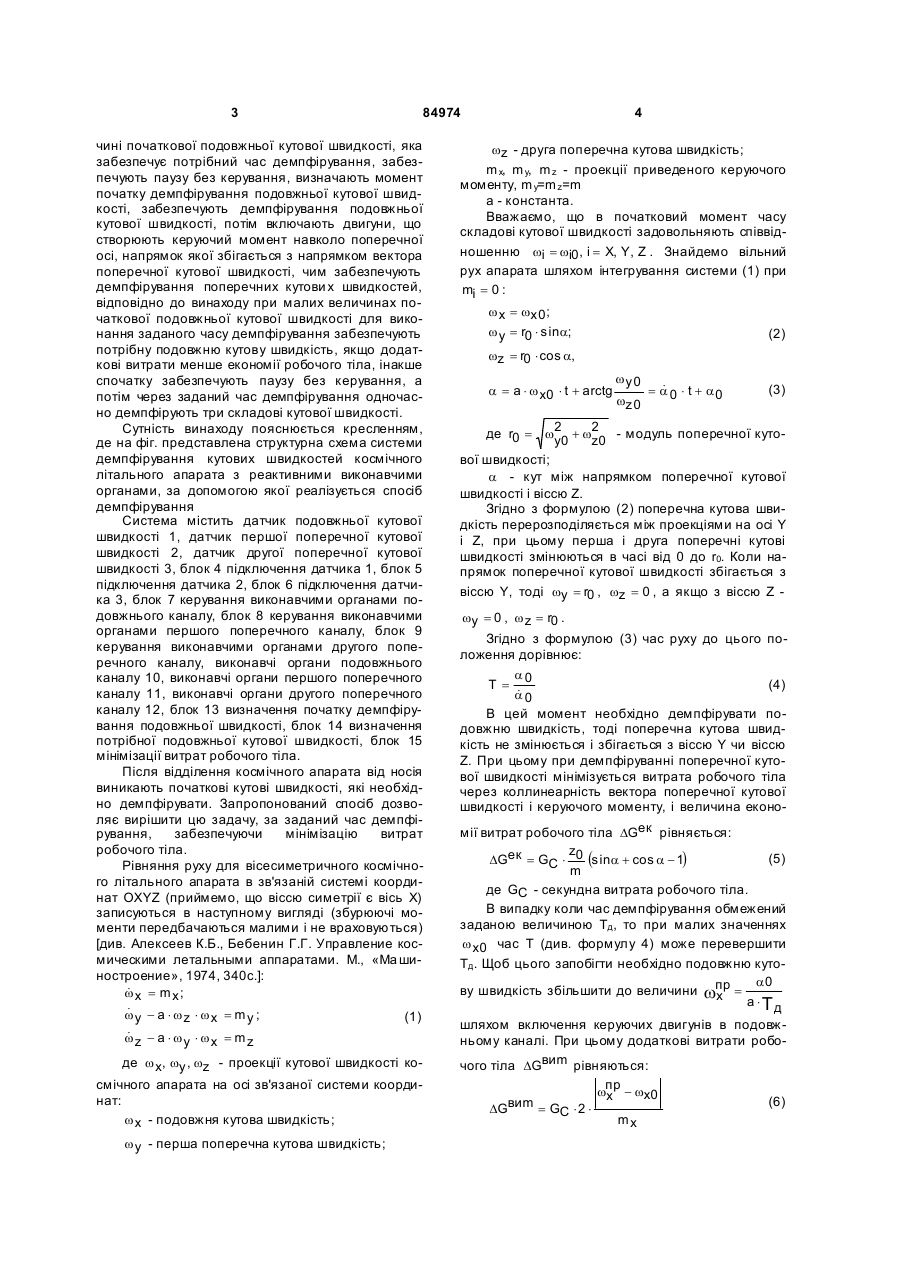
Спосіб демпфірування кутови х швидкостей космічного літального апарата, який полягає в то C2 1 3 84974 чині початкової подовжньої кутової швидкості, яка забезпечує потрібний час демпфірування, забезпечують паузу без керування, визначають момент початку демпфірування подовжньої кутової швидкості, забезпечують демпфірування подовжньої кутової швидкості, потім включають двигуни, що створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, чим забезпечують демпфірування поперечних кутови х швидкостей, відповідно до винаходу при малих величинах початкової подовжньої кутової швидкості для виконання заданого часу демпфірування забезпечують потрібну подовжню кутову швидкість, якщо додаткові витрати менше економії робочого тіла, інакше спочатку забезпечують паузу без керування, а потім через заданий час демпфірування одночасно демпфірують три складові кутової швидкості. Сутність винаходу пояснюється кресленням, де на фіг. представлена структурна схема системи демпфірування кутових швидкостей космічного літального апарата з реактивними виконавчими органами, за допомогою якої реалізується спосіб демпфірування Система містить датчик подовжньої кутової швидкості 1, датчик першої поперечної кутової швидкості 2, датчик другої поперечної кутової швидкості 3, блок 4 підключення датчика 1, блок 5 підключення датчика 2, блок 6 підключення датчика 3, блок 7 керування виконавчими органами подовжнього каналу, блок 8 керування виконавчими органами першого поперечного каналу, блок 9 керування виконавчими органами другого поперечного каналу, виконавчі органи подовжнього каналу 10, виконавчі органи першого поперечного каналу 11, виконавчі органи другого поперечного каналу 12, блок 13 визначення початку демпфірування подовжньої швидкості, блок 14 визначення потрібної подовжньої кутової швидкості, блок 15 мінімізації витрат робочого тіла. Після відділення космічного апарата від носія виникають початкові кутові швидкості, які необхідно демпфірувати. Запропонований спосіб дозволяє вирішити цю задачу, за заданий час демпфірування, забезпечуючи мінімізацію витрат робочого тіла. Рівняння руху для вісесиметричного космічного літального апарата в зв'язаній системі координат OXYZ (приймемо, що віссю симетрії є вісь X) записуються в наступному вигляді (збурюючі моменти передбачаються малими і не враховуються) [див. Алексеев К.Б., Бебенин Г.Г. Управление космическими летальными аппаратами. М., «Ма шиностроение», 1974, 340с.]: & wx = m x ; & wy - a × wz × wx = m y ; (1) & wz - a × wy × wx = m z де w x, wy , wz - проекції кутової швидкості космічного апарата на осі зв'язаної системи координат: w x - подовжня кутова швидкість; w y - перша поперечна кутова швидкість; 4 wz - друга поперечна кутова швидкість; m x, m y, m z - проекції приведеного керуючого моменту, m y=m z=m а - константа. Вважаємо, що в початковий момент часу складові кутової швидкості задовольняють співвідношенню wi = wi0, i = X, Y, Z . Знайдемо вільний рух апарата шляхом інтегрування системи (1) при mi = 0 : w x = wx 0 ; w y = r0 × sin a; (2) wz = r0 × cos a, a = a × w x0 × t + arctg wy 0 wz 0 & = a 0 × t + a0 (3) w20 + w20 - модуль поперечної кутоy z вої швидкості; a - кут між напрямком поперечної кутової швидкості і віссю Z. Згідно з формулою (2) поперечна кутова швидкість перерозподіляється між проекціями на осі Y і Z, при цьому перша і друга поперечні кутові швидкості змінюються в часі від 0 до r0. Коли напрямок поперечної кутової швидкості збігається з віссю Y, тоді wy = r0 , wz = 0 , а якщо з віссю Z де r0 = wy = 0 , w z = r0 . Згідно з формулою (3) час руху до цього положення дорівнює: a T= 0 (4) & a0 В цей момент необхідно демпфірувати подовжню швидкість, тоді поперечна кутова швидкість не змінюється і збігається з віссю Y чи віссю Z. При цьому при демпфіруванні поперечної кутової швидкості мінімізується витрата робочого тіла через коллинеарність вектора поперечної кутової швидкості і керуючого моменту, і величина економії витрат робочого тіла DGек рівняється: z (5) DGек = GC × 0 (sin a + cos a - 1) m де GC - секундна витрата робочого тіла. В випадку коли час демпфірування обмежений заданою величиною Тд, то при малих значеннях w x0 час Т (див. формулу 4) може перевершити Тд. Щоб цього запобігти необхідно подовжню кутоa0 ву швидкість збільшити до величини wпр = х а ×Тд шляхом включення керуючих двигунів в подовжньому каналі. При цьому додаткові витрати робочого тіла DGвиm рівняються: DGвиm = GC × 2 × пр wx - wx0 mx (6) 5 84974 Якщо DGек > D Gвиm , то подальша послідовність дій по керуванню така як і в випадку Т
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of damping the angular speeds of spaceship
Автори англійськоюKulik Anatolii Stepanovych, Bandura Ivan Mykolaiovych, Zadorozhnia Mariia Oleksandrivna
Назва патенту російськоюСпособ демпфирования угловых скоростей космического летательного аппарата
Автори російськоюКулик Анатолий Степанович, Бандура Иван Николаевич, Задорожная Мария Александровна
МПК / Мітки
МПК: B64G 1/24
Мітки: космічного, швидкостей, спосіб, літального, демпфірування, кутових, апарата
Код посилання
<a href="https://ua.patents.su/3-84974-sposib-dempfiruvannya-kutovikh-shvidkostejj-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб демпфірування кутових швидкостей космічного літального апарата</a>
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Бандура Іван Миколайович, Колесников Геннадій Викторович
МПК: B64G 1/24
Мітки: літального, кутових, швидкостей, демпфірування, система, космічного, апарата
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Войченко Оксана Олександрівна
МПК: B64G 1/24
Мітки: спосіб, космічного, кутових, демпфірування, швидкостей, вісесиметричного, літального, апарата
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 36117
Опубліковано: 10.10.2008
Автори: Симонов Володимир Федорович, Драньов Олександр Сергійович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: швидкостей, кутових, космічного, відмовостійкого, демпфірування, вісесиметричного, апарата, літального, спосіб
Формула / Реферат:
Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, забезпечують паузу без керування, забезпечують демпфірування подовжньої кутової швидкості, потім забезпечують демпфірування поперечних кутових швидкостей, який відрізняється тим, що після вимірювання початкових кутових швидкостей...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Снагіцький Сергій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апарата, демпфірування, кутових, літального, швидкостей, система, космічного, вісесиметричного
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 35086
Опубліковано: 26.08.2008
Автори: Юрковець Ігор Валентинович, Субота Анатолій Максимович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: вісесиметричного, космічного, демпфірування, швидкостей, літального, система, апарата, кутових
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, між кожним датчиком і блоком керування органами...
Попередній патент: Далекомір
Наступний патент: Спосіб оперативного визначення теплоти згоряння газоподібних палив
Випадковий патент: Пристрій для регулювання температури в приміщенні споруди, наприклад теплиці