Підводний апарат
Номер патенту: 86123
Опубліковано: 25.03.2009
Автори: Блінцов Володимир Степанович, Дубіна Марина Олександрівна, Бугаєнко Борис Андрійович, Галь Анатолій Феодосійович

Формула / Реферат
Підводний апарат, що містить послідовно з'єднані міцні сферичні корпуси, розміщені в рамі легкого корпусу, рушійно-рульовий комплекс і головну баластну цистерну, який відрізняється тим, що внизу рами легкого корпусу встановлено вантажозахватний пристрій, який містить лебідки, розміщені на рамній основі, канатну систему, одні кінці якої заведені на барабани лебідок, а інші з'єднані із захоплювачем, виконаним у вигляді ряду понтонів із шарнірно прикріпленими до них захоплювальними лапами.
Текст
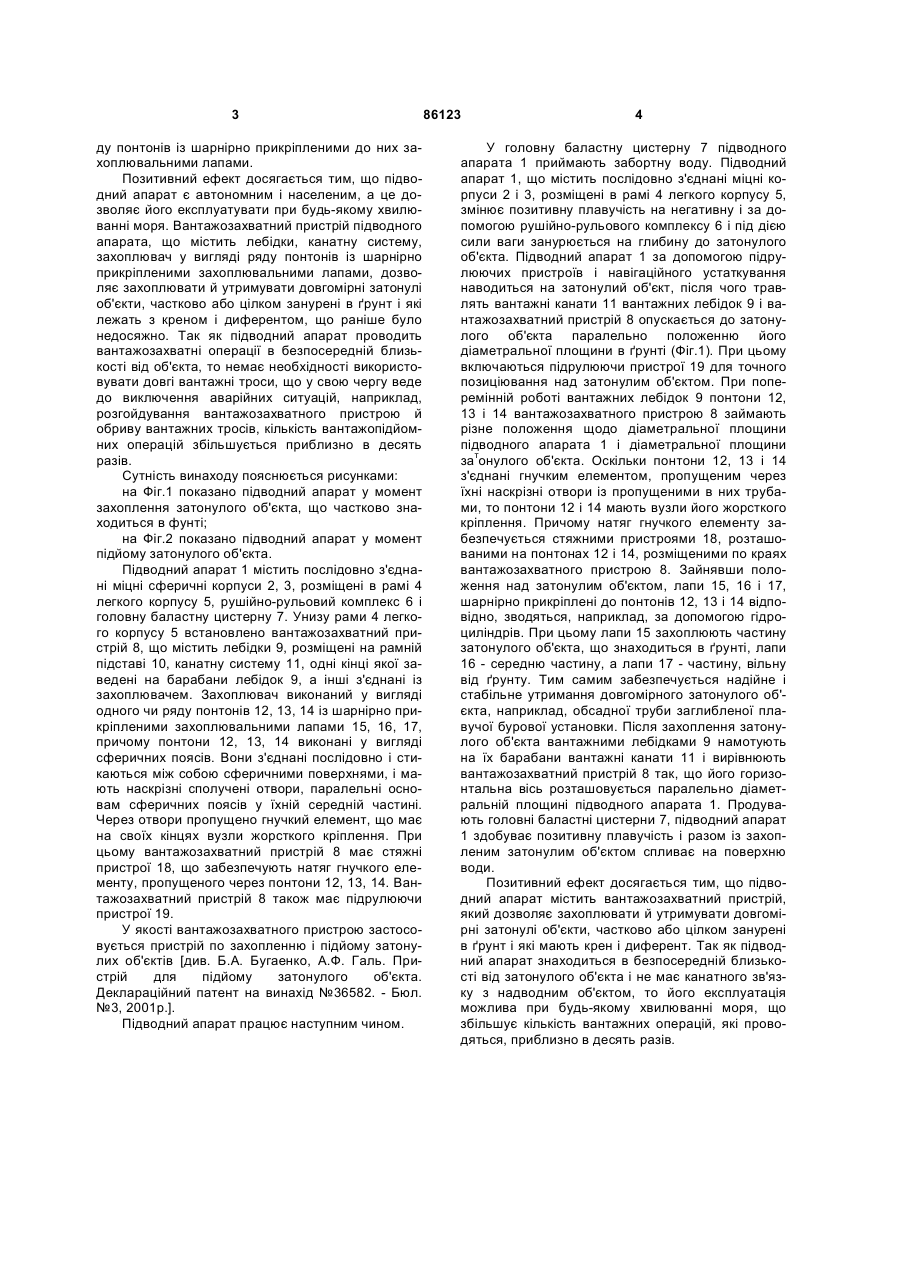
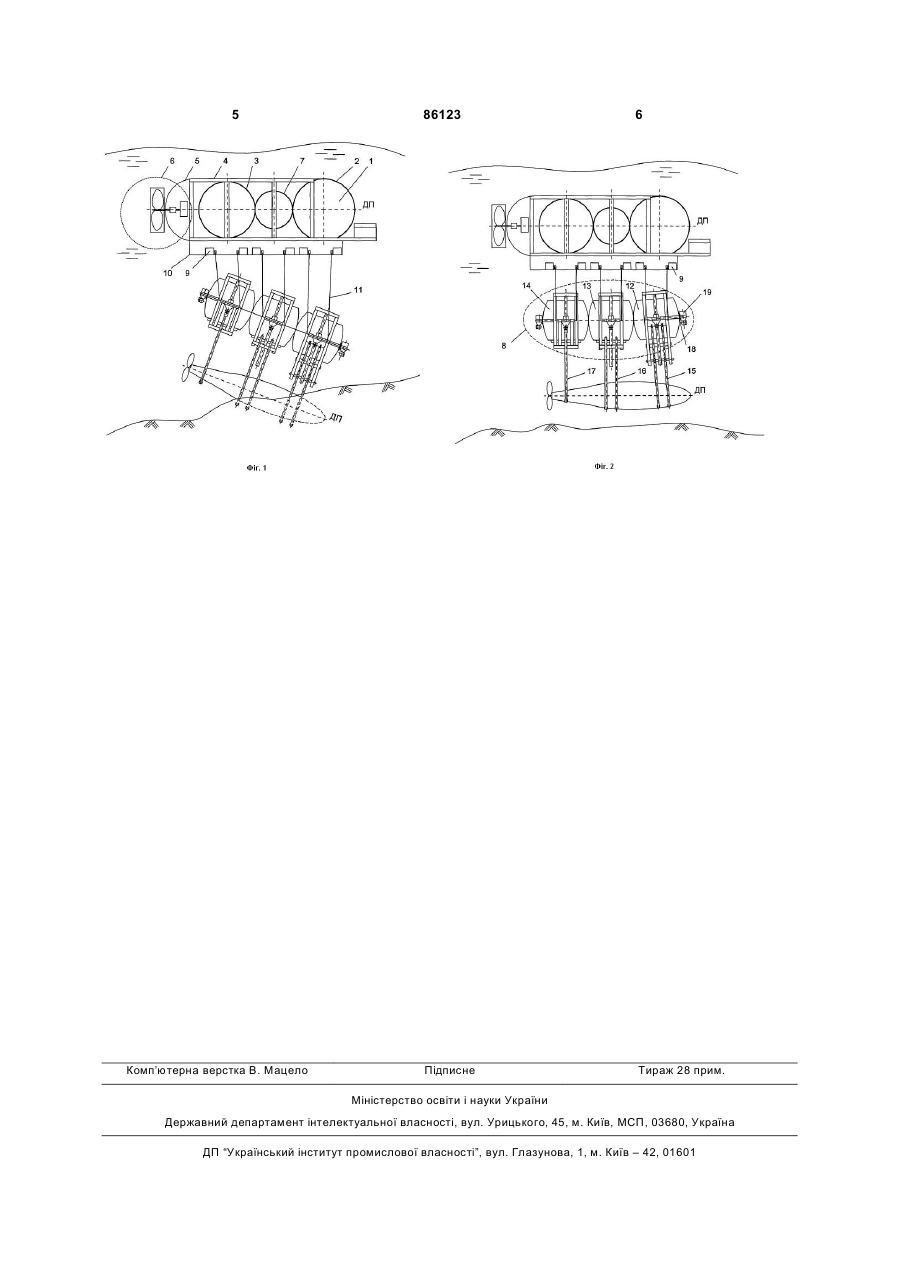
Підводний апарат, що містить послідовно з'єднані міцні сферичні корпуси, розміщені в рамі легкого корпусу, рушійно-рульовий комплекс і головну баластну цистерну, який відрізняється тим, що внизу рами легкого корпусу встановлено вантажозахватний пристрій, який містить лебідки, розміщені на рамній основі, канатну систему, одні кінці якої заведені на барабани лебідок, а інші з'єднані із захоплювачем, виконаним у вигляді ряду понтонів із шарнірно прикріпленими до них захоплювальними лапами. Підводний апарат відноситься до океанотехніки, зокрема до підводної техніки. Відомо про підводний апарат "Deep Rover Submersible" [див. Каталог продукції компанії Nuitko на сайті www.nuitko.com/products/subs.html# від 8 червня 2006 року], що містить два міцних сферичних корпуси, послідовно з'єднаних алюмінієвим кільцем, легкий корпус, рушійно-рульовий комплекс, вантажозахватний пристрій - маніпулятори. Однак багатофункціональні маніпулятори населеного підводного апарата "Deep Rover Submersible" не призначені для підйому довгомірних затонулих об'єктів, наприклад обсадних труб свердловини, а також для захоплення об'єктів з великою масою та габаритами, частково або цілком занурених у ґрунт. Найбільш близьким за технічною сутністю, істотним ознакам і позитивному ефекту є підводний апарат [див. Блінцов B.C., Бугаєнко Б.А., Галь А.Ф., Дубіна М.О. Підводний апарат. Патент на корисну модель №20209. - Бюл. №1, 2007p.], що містить послідовно з'єднані міцні корпуси, які знаходяться в рамі легкого корпусу, рушійно-рульовий комплекс, баластні цистерни, маніпулятор і вантажозахватний пристрій, виконаний у вигляді грей фера з лапами. Однак вантажозахватний пристрій не може захоплювати, утримувати і переміщати затонулі об'єкти довжиною більше ніж 3 метра (довгомірні об'єкти). В основу винаходу поставлено задачу удосконалення підводного апарата, який обладнано вантажозахватним пристроєм, що містить лебідки, канатну систему, одні кінці якої заведені на барабани лебідок, а інші з'єднані із захоплювачем, виконаним у вигляді одного чи ряду понтонів із шарнірно прикріпленими до них захоплювальними лапами для захоплення та підйому довгомірних затонулих об'єктів, частково або повністю занурених в грунт, за рахунок цього збільшується кількість вантажних операцій, що виконуються. Поставлена задача вирішується тим, що підводний апарат, який містить послідовно з'єднані міцні сферичні корпуси, розміщені в рамі легкого корпуса, рушійно-рульовий комплекс і баластну цистерну, відповідно до винаходу оснащений вантажозахватним пристроєм, встановленим внизу рами легкого корпусу, що містить лебідки, розміщені на рамній підставі, канатну систему, одні кінці якої заведені на барабани лебідок, а інші з'єднані з захоплювачем, виконаним у вигляді одного чи ря (19) UA (11) 86123 (13) C2 (21) a200707159 (22) 25.06.2007 (24) 25.03.2009 (46) 25.03.2009, Бюл.№ 6, 2009 р. (72) БЛІНЦОВ ВОЛОДИМИР СТЕПАНОВИЧ, UA, БУГАЄНКО БОРИС АНДРІЙОВИЧ, UA, ГАЛЬ АНАТОЛІЙ ФЕОДОСІЙОВИЧ, UA, ДУБІНА МАРИНА ОЛЕКСАНДРІВНА, UA (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ КОРАБЛЕБУДУВАННЯ ІМЕНІ АДМІРАЛА МАКАРОВА, UA (56) UA 20209 U; 15.01.2007 UA 36582 С2; 16.04.2001 WO 2004065206 A1; 05.08.2004 RU 2176966 C2; 20.12.2001 US 1814689; 14.07.1931 US 3367299; 06.02.1968 SU 1341099 A1; 30.09.1987 3 ду понтонів із шарнірно прикріпленими до них захоплювальними лапами. Позитивний ефект досягається тим, що підводний апарат є автономним і населеним, а це дозволяє його експлуатувати при будь-якому хвилюванні моря. Вантажозахватний пристрій підводного апарата, що містить лебідки, канатну систему, захоплювач у вигляді ряду понтонів із шарнірно прикріпленими захоплювальними лапами, дозволяє захоплювати й утримувати довгомірні затонулі об'єкти, частково або цілком занурені в ґрунт і які лежать з креном і диферентом, що раніше було недосяжно. Так як підводний апарат проводить вантажозахватні операції в безпосередній близькості від об'єкта, то немає необхідності використовувати довгі вантажні троси, що у свою чергу веде до виключення аварійних ситуацій, наприклад, розгойдування вантажозахватного пристрою й обриву вантажних тросів, кількість вантажопідйомних операцій збільшується приблизно в десять разів. Сутність винаходу пояснюється рисунками: на Фіг.1 показано підводний апарат у момент захоплення затонулого об'єкта, що частково знаходиться в фунті; на Фіг.2 показано підводний апарат у момент підйому затонулого об'єкта. Підводний апарат 1 містить послідовно з'єднані міцні сферичні корпуси 2, 3, розміщені в рамі 4 легкого корпусу 5, рушійно-рульовий комплекс 6 і головну баластну цистерну 7. Унизу рами 4 легкого корпусу 5 встановлено вантажозахватний пристрій 8, що містить лебідки 9, розміщені на рамній підставі 10, канатну систему 11, одні кінці якої заведені на барабани лебідок 9, а інші з'єднані із захоплювачем. Захоплювач виконаний у вигляді одного чи ряду понтонів 12, 13, 14 із шарнірно прикріпленими захоплювальними лапами 15, 16, 17, причому понтони 12, 13, 14 виконані у вигляді сферичних поясів. Вони з'єднані послідовно і стикаються між собою сферичними поверхнями, і мають наскрізні сполучені отвори, паралельні основам сферичних поясів у їхній середній частині. Через отвори пропущено гнучкий елемент, що має на своїх кінцях вузли жорсткого кріплення. При цьому вантажозахватний пристрій 8 має стяжні пристрої 18, що забезпечують натяг гнучкого елементу, пропущеного через понтони 12, 13, 14. Вантажозахватний пристрій 8 також має підрулюючи пристрої 19. У якості вантажозахватного пристрою застосовується пристрій по захопленню і підйому затонулих об'єктів [див. Б.А. Бугаенко, А.Ф. Галь. Пристрій для підйому затонулого об'єкта. Деклараційний патент на винахід №36582. - Бюл. №3, 2001p.]. Підводний апарат працює наступним чином. 86123 4 У головну баластну цистерну 7 підводного апарата 1 приймають забортну воду. Підводний апарат 1, що містить послідовно з'єднані міцні корпуси 2 і 3, розміщені в рамі 4 легкого корпусу 5, змінює позитивну плавучість на негативну і за допомогою рушійно-рульового комплексу 6 і під дією сили ваги занурюється на глибину до затонулого об'єкта. Підводний апарат 1 за допомогою підрулюючих пристроїв і навігаційного устаткування наводиться на затонулий об'єкт, після чого травлять вантажні канати 11 вантажних лебідок 9 і вантажозахватний пристрій 8 опускається до затонулого об'єкта паралельно положенню його діаметральної площини в ґрунті (Фіг.1). При цьому включаються підрулюючи пристрої 19 для точного позиціювання над затонулим об'єктом. При поперемінній роботі вантажних лебідок 9 понтони 12, 13 і 14 вантажозахватного пристрою 8 займають різне положення щодо діаметральної площини підводного апарата 1 і діаметральної площини затонулого об'єкта. Оскільки понтони 12, 13 і 14 з'єднані гнучким елементом, пропущеним через їхні наскрізні отвори із пропущеними в них трубами, то понтони 12 і 14 мають вузли його жорсткого кріплення. Причому натяг гнучкого елементу забезпечується стяжними пристроями 18, розташованими на понтонах 12 і 14, розміщеними по краях вантажозахватного пристрою 8. Зайнявши положення над затонулим об'єктом, лапи 15, 16 і 17, шарнірно прикріплені до понтонів 12, 13 і 14 відповідно, зводяться, наприклад, за допомогою гідроциліндрів. При цьому лапи 15 захоплюють частину затонулого об'єкта, що знаходиться в ґрунті, лапи 16 - середню частину, а лапи 17 - частину, вільну від ґрунту. Тим самим забезпечується надійне і стабільне утримання довгомірного затонулого об'єкта, наприклад, обсадної труби заглибленої плавучої бурової установки. Після захоплення затонулого об'єкта вантажними лебідками 9 намотують на їх барабани вантажні канати 11 і вирівнюють вантажозахватний пристрій 8 так, що його горизонтальна вісь розташовується паралельно діаметральній площині підводного апарата 1. Продувають головні баластні цистерни 7, підводний апарат 1 здобуває позитивну плавучість і разом із захопленим затонулим об'єктом спливає на поверхню води. Позитивний ефект досягається тим, що підводний апарат містить вантажозахватний пристрій, який дозволяє захоплювати й утримувати довгомірні затонулі об'єкти, частково або цілком занурені в ґрунт і які мають крен і диферент. Так як підводний апарат знаходиться в безпосередній близькості від затонулого об'єкта і не має канатного зв'язку з надводним об'єктом, то його експлуатація можлива при будь-якому хвилюванні моря, що збільшує кількість вантажних операцій, які проводяться, приблизно в десять разів. 5 Комп’ютерна верстка В. Мацело 86123 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater vehicle
Автори англійськоюBlintsov Volodymyr Stepanovych, Buhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych, Dubina Maryna Oleksandrivna
Назва патенту російськоюПодводный аппарат
Автори російськоюБлинцов Владимир Степанович, Бугаенко Борис Андреевич, Галь Анатолий Феодосьевич, Дубина Марина Александровна
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/3-86123-pidvodnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат</a>
Рятувальний підводний апарат

Номер патенту: 16642
Опубліковано: 15.08.2006
Автори: Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63C 9/00, B63G 8/00, B63B 3/13
Мітки: рятувальний, підводний, апарат
Формула / Реферат:
1. Рятувальний підводний апарат, що містить міцний корпус у вигляді послідовно сполучених порожнистих сфер, поміщених в легкий корпус, а одна з сфер забезпечена основною камерою присоса, розташованою в нижній частині сфери, який відрізняється тим, що забезпечений додатковими бічними камерами присоса.2. Рятувальний підводний апарат за п. 1, який відрізняється тим, що основна камера присоса розташована в центральній сфері міцного...
Підводний апарат
Номер патенту: 26179
Опубліковано: 10.09.2007
Автори: Байдушина Тетяна Іванівна, Бугаєнко Борис Андрійович, Блінцов Володимир Степанович, Івонюк Михайло Васильович, Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63G 8/00
Формула / Реферат:
1. Підводний апарат, що містить міцні корпуси, розташовані на рамі легкого корпусу, у якій розміщені головні баластові цистерни і рушійно-рульовий комплекс, встановлений у кормі, що має рушії та їхні приводи, зв’язані з енергетичною установкою, при цьому на рамі закріплені носові телекамери, світильники, маніпулятори, носовий вантажозахватний пристрій у вигляді грейфера з лапами, розміщеними на осі, з’єднаній через підшипники з рамою і...
Підводний апарат

Номер патенту: 20209
Опубліковано: 15.01.2007
Автори: Галь Анатолій Феодосійович, Блінцов Володимир Степанович, Бугаєнко Борис Андрійович, Дубіна Марина Олександрівна
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, який містить міцний і легкий корпуси, раму, головні баластні цистерни у легкому корпусі, рушійно-рульовий комплекс, розміщений у корпусі підводного апарата, має рушії і їх приводи, енергетичну установку, що зв'язана з приводами рушіїв, систему керування у міцному корпусі, телекамери, світильники, що розміщені у носовій частині підводного апарата на рамі, маніпулятори у нижній частині легкого корпусу, аварійно-сигнальний буй,...
Підводний апарат

Номер патенту: 86121
Опубліковано: 25.03.2009
Автори: Бугаєнко Борис Андрійович, Лигалова Вікторія Анатоліївна, Галь Анатолій Феодосійович, Штефирца Анна Іллівна, Блінцов Володимир Степанович, Байдушина Тетяна Іванівна
МПК: B63B 3/00, B63G 8/00, B63B 19/00
Формула / Реферат:
1. Підводний апарат, що містить населені кормовий, носовий і основний центральний міцні сферичні корпуси, розміщені в рамі легкого корпусу і з'єднані між собою послідовно перехідними люками, який відрізняється тим, що населені міцні корпуси оснащені ілюмінаторами, розміщеними по окружності в площині, паралельній мідель-шпангоуту, під кутом 90° чи 45° до взаємно перпендикулярних осей, що лежать в згаданій площині, а точка їх перехрещення...
Підводний апарат-транспортувальник
Номер патенту: 20094
Опубліковано: 15.01.2007
Автори: Галь Анатолій Федосійович, Дубіна Марина Олександрівна, Андрейчикова Ганна Юріївна, Бугаєнко Борис Андрійович
МПК: B63G 8/00
Мітки: апарат-транспортувальник, підводний
Формула / Реферат:
Підводний апарат-транспортувальник, який містить міцний корпус, що складається з носового, центрального і кормового відсіків у вигляді послідовно з'єднаних порожнистих сфер і/або порожнистих циліндрів із сферичними кінцевими частинами, поміщених в легкий корпус, енергетичну установку в кормовому відсіку, рушійно-рульовий комплекс з системою керування, цистерни головного баласту, багатоступеневий маніпулятор, балони повітря високого тиску,...
Попередній патент: Касетний фільтр
Наступний патент: Спосіб сушіння сільськогосподарських продуктів в мікрохвильовому полі
Випадковий патент: Виконавчий механізм гравірувального верстата