Підводний апарат
Номер патенту: 26179
Опубліковано: 10.09.2007
Автори: Бугаєнко Борис Андрійович, Дубіна Марина Олександрівна, Івонюк Михайло Васильович, Галь Анатолій Феодосійович, Байдушина Тетяна Іванівна, Блінцов Володимир Степанович

Формула / Реферат
1. Підводний апарат, що містить міцні корпуси, розташовані на рамі легкого корпусу, у якій розміщені головні баластові цистерни і рушійно-рульовий комплекс, встановлений у кормі, що має рушії та їхні приводи, зв’язані з енергетичною установкою, при цьому на рамі закріплені носові телекамери, світильники, маніпулятори, носовий вантажозахватний пристрій у вигляді грейфера з лапами, розміщеними на осі, з’єднаній через підшипники з рамою і встановленій в носовій частині підводного апарата, важелі, з’єднані з робочими понтонами, розташованими по правому і лівому бортах підводного апарата, що розділені пружною мембраною на верхню і нижню порожнини, причому у верхній порожнині, виконаній у вигляді лійки, розміщені елементи позитивної плавучості, а нижні порожнини сполучені через кінгстони з забортною водою і гнучкими шлангами через ресивер - між собою, при цьому верхні порожнини понтонів зв’язані гнучкими шлангами з верхньою порожниною контейнера, що містить елементи позитивної плавучості, причому контейнер обладнаний пружною мембраною, а нижня порожнина через насос і кінгстон з’єднана з забортною водою, причому гнучкі шланги оснащені керованими клапанами, який відрізняється тим, що підводний апарат додатково оснащений кормовим вантажозахватним пристроєм у вигляді грейфера з лапами, розміщеними на осі, з’єднаній через підшипники з рамою і встановленій в кормовій частині підводного апарата, важелями, з’єднаними з робочими понтонами, розташованими по правому і лівому бортах підводного апарата, причому робочі понтони носового і кормового вантажозахватних пристроїв з’єднані між собою і мають загальну внутрішню порожнину, а також додатково встановлені кормові телекамери, світильники, маніпулятори.
2. Підводний апарат за п. 1, який відрізняється тим, що верхні камери робочих понтонів і контейнера додатково заповнені робочою рідиною, наприклад олією чи забортною водою.
3. Підводний апарат за пп. 1 і 2, який відрізняється тим, що в районі установки маніпуляторів розташовані водомети.
Текст
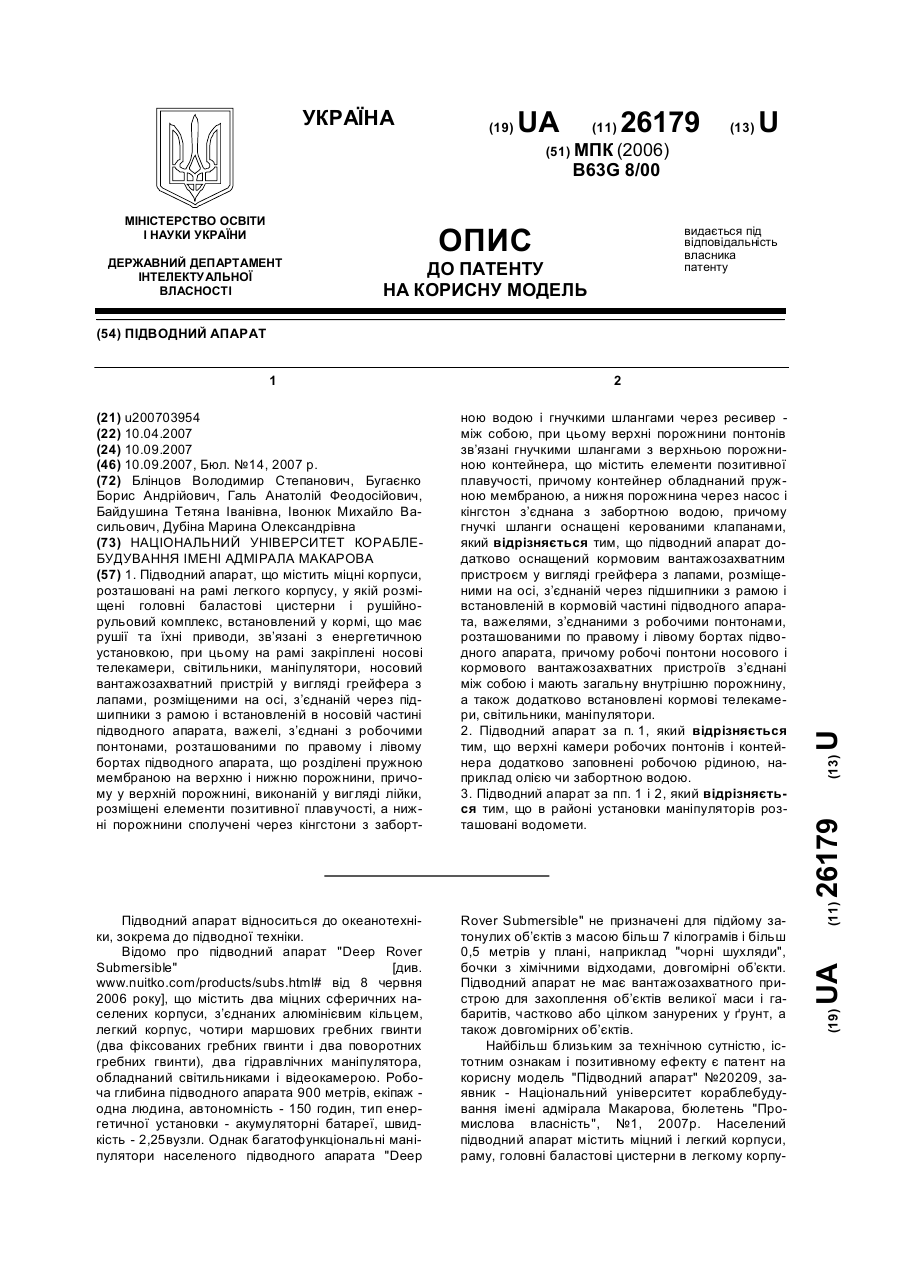
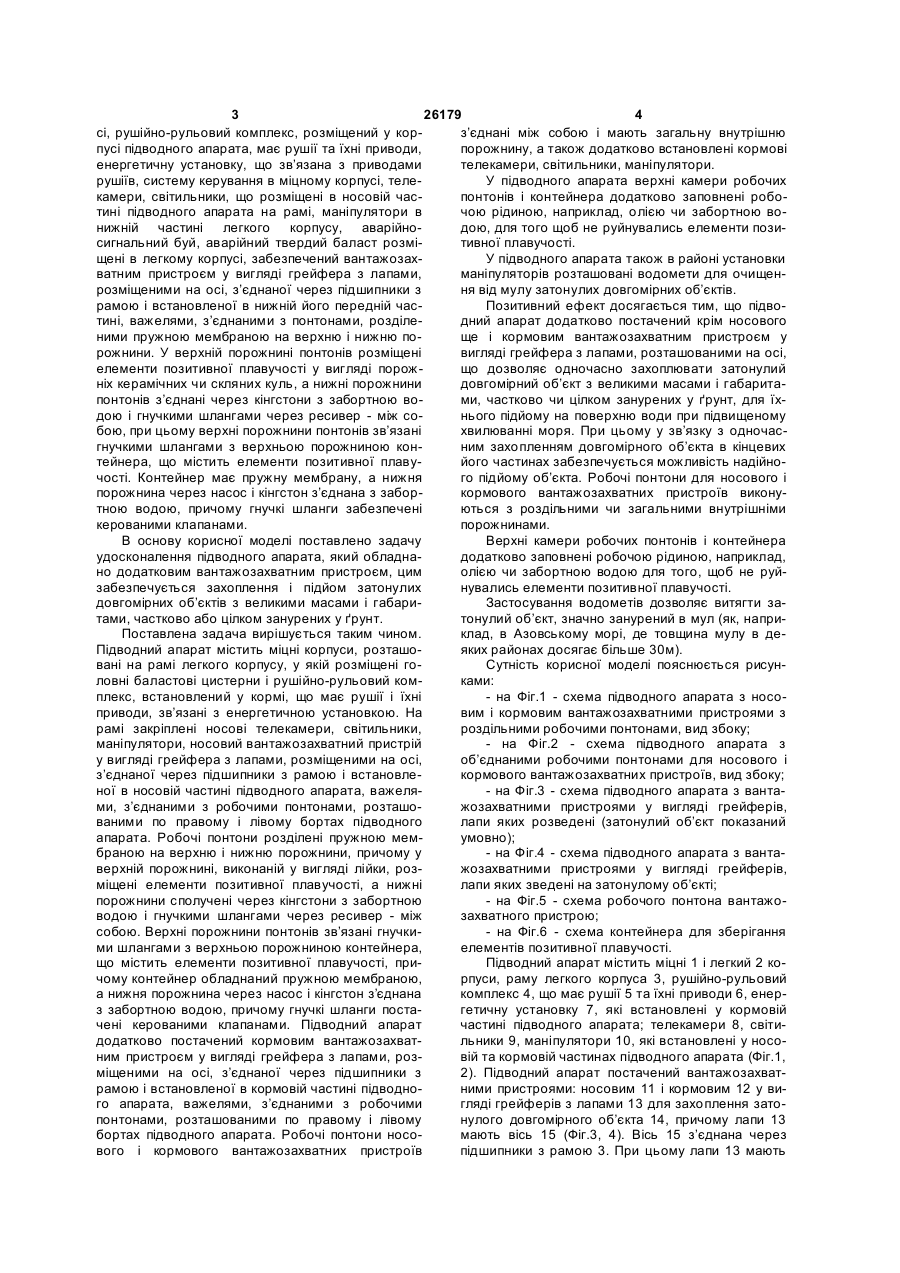
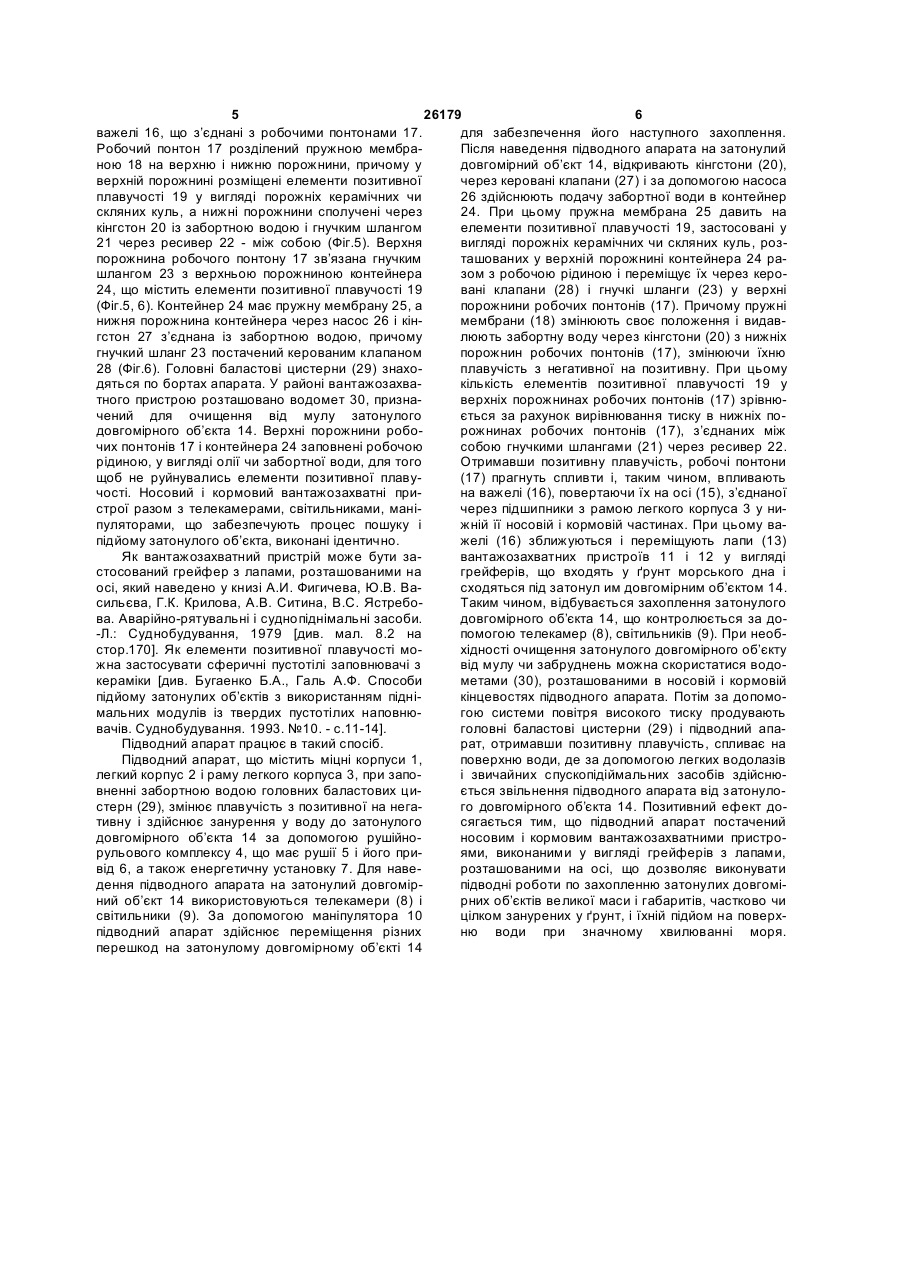
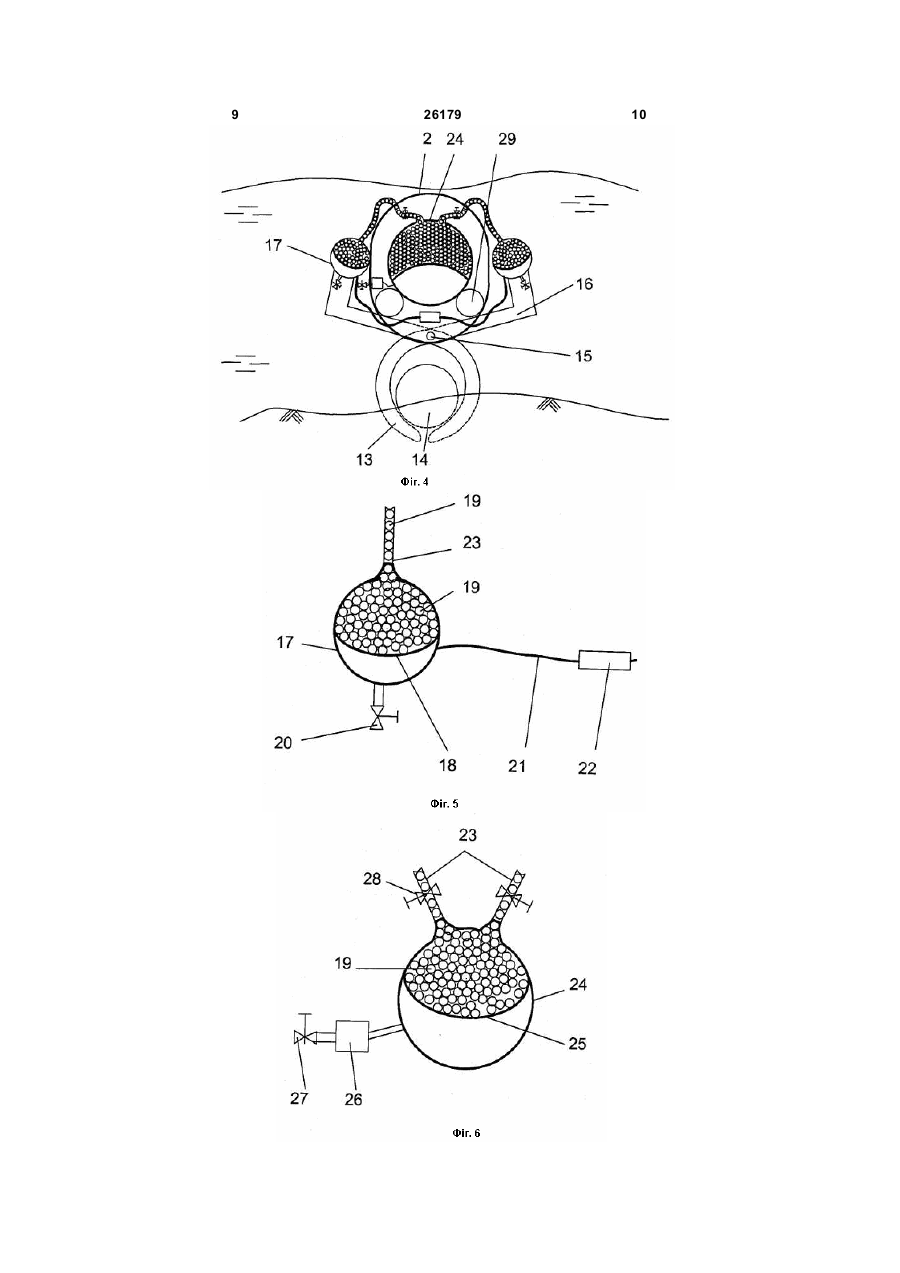
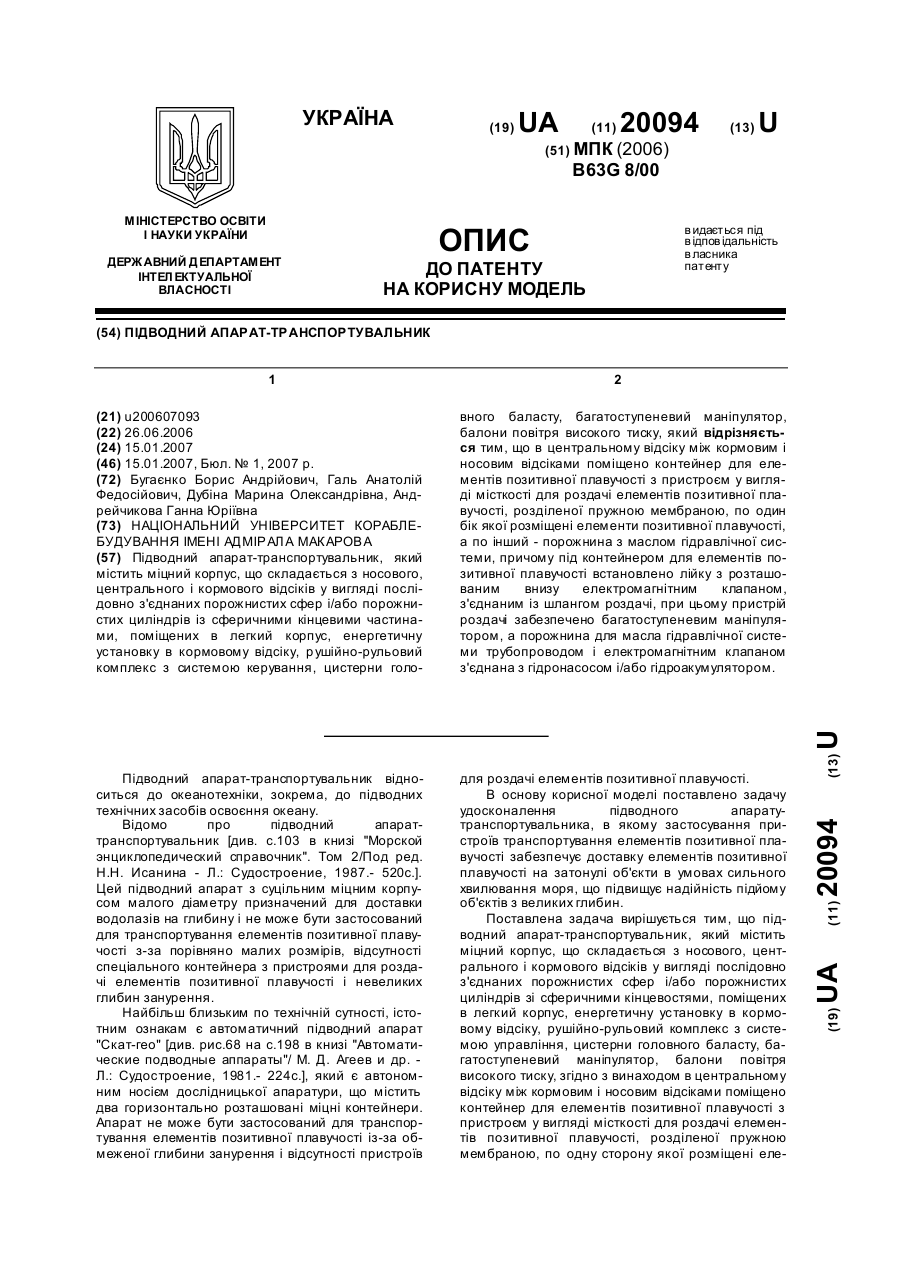
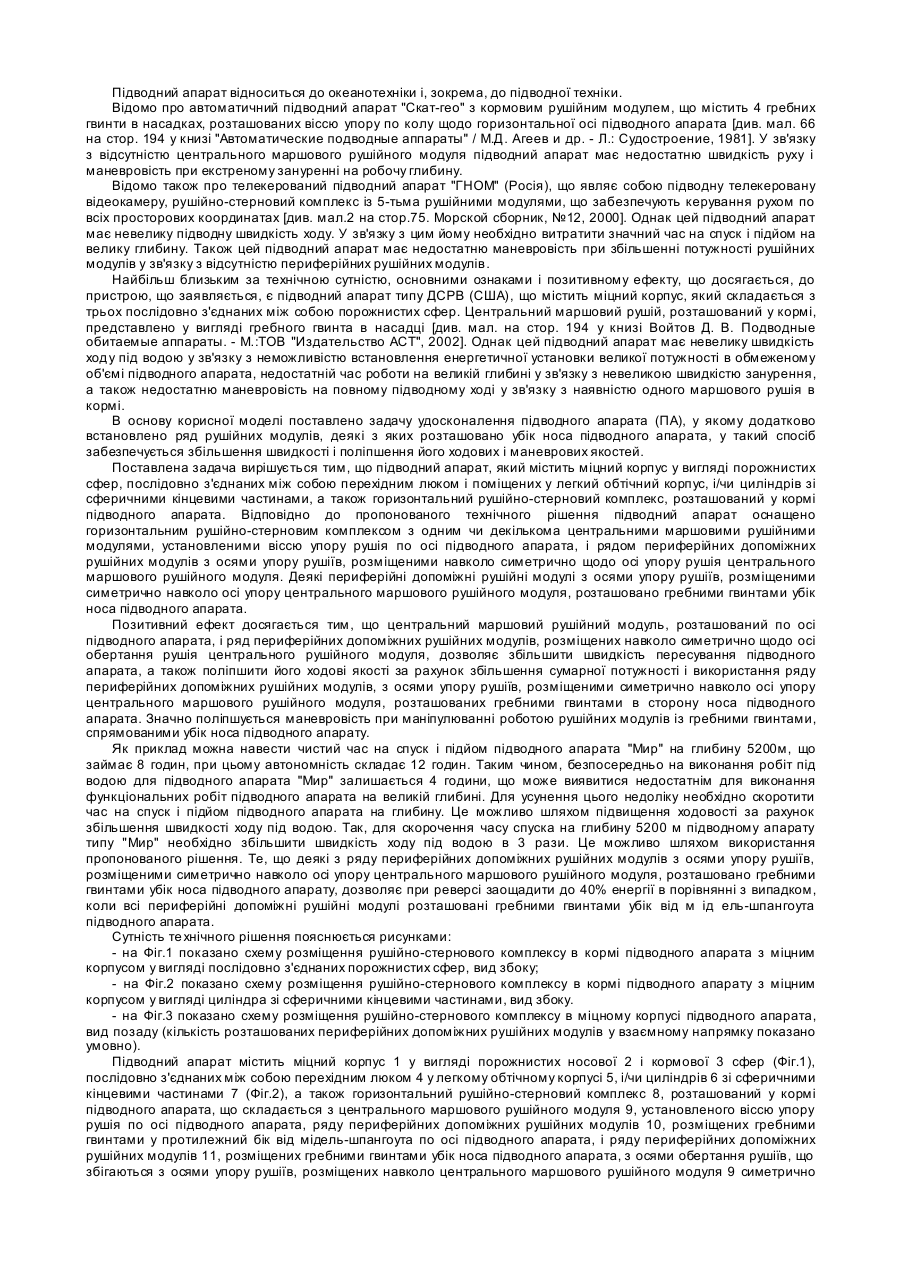
1. Підводний апарат, що містить міцні корпуси, розташовані на рамі легкого корпусу, у якій розміщені головні баластові цистерни і рушійнорульовий комплекс, встановлений у кормі, що має рушії та їхні приводи, зв’язані з енергетичною установкою, при цьому на рамі закріплені носові телекамери, світильники, маніпулятори, носовий вантажозахватний пристрій у вигляді грейфера з лапами, розміщеними на осі, з’єднаній через підшипники з рамою і встановленій в носовій частині підводного апарата, важелі, з’єднані з робочими понтонами, розташованими по правому і лівому бортах підводного апарата, що розділені пружною мембраною на верхню і нижню порожнини, причому у верхній порожнині, виконаній у вигляді лійки, розміщені елементи позитивної плавучості, а нижні порожнини сполучені через кінгстони з заборт U 2 (19) 1 3 26179 4 з’єднані між собою і мають загальну внутрішню сі, рушійно-рульовий комплекс, розміщений у корпорожнину, а також додатково встановлені кормові пусі підводного апарата, має рушії та їхні приводи, телекамери, світильники, маніпулятори. енергетичну установку, що зв’язана з приводами У підводного апарата верхні камери робочих рушіїв, систему керування в міцному корпусі, телепонтонів і контейнера додатково заповнені робокамери, світильники, що розміщені в носовій часчою рідиною, наприклад, олією чи забортною вотині підводного апарата на рамі, маніпулятори в дою, для того щоб не руйнувались елементи позинижній частині легкого корпусу, аварійнотивної плавучості. сигнальний буй, аварійний твердий баласт розміУ підводного апарата також в районі установки щені в легкому корпусі, забезпечений вантажозахманіпуляторів розташовані водомети для очищенватним пристроєм у вигляді грейфера з лапами, ня від мулу затонулих довгомірних об’єктів. розміщеними на осі, з’єднаної через підшипники з Позитивний ефект досягається тим, що підворамою і встановленої в нижній його передній часдний апарат додатково постачений крім носового тині, важелями, з’єднаними з понтонами, розділеще і кормовим вантажозахватним пристроєм у ними пружною мембраною на верхню і нижню повигляді грейфера з лапами, розташованими на осі, рожнини. У верхній порожнині понтонів розміщені що дозволяє одночасно захоплювати затонулий елементи позитивної плавучості у вигляді порождовгомірний об’єкт з великими масами і габаританіх керамічних чи скляних куль, а нижні порожнини ми, частково чи цілком занурених у ґрунт, для їхпонтонів з’єднані через кінгстони з забортною вонього підйому на поверхню води при підвищеному дою і гнучкими шлангами через ресивер - між сохвилюванні моря. При цьому у зв’язку з одночасбою, при цьому верхні порожнини понтонів зв’язані ним захопленням довгомірного об’єкта в кінцевих гнучкими шлангами з верхньою порожниною конйого частинах забезпечується можливість надійнотейнера, що містить елементи позитивної плавуго підйому об’єкта. Робочі понтони для носового і чості. Контейнер має пружну мембрану, а нижня кормового вантажозахватних пристроїв виконупорожнина через насос і кінгстон з’єднана з заборються з роздільними чи загальними внутрішніми тною водою, причому гнучкі шланги забезпечені порожнинами. керованими клапанами. Верхні камери робочих понтонів і контейнера В основу корисної моделі поставлено задачу додатково заповнені робочою рідиною, наприклад, удосконалення підводного апарата, який обладнаолією чи забортною водою для того, щоб не руйно додатковим вантажозахватним пристроєм, цим нувались елементи позитивної плавучості. забезпечується захоплення і підйом затонулих Застосування водометів дозволяє витягти задовгомірних об’єктів з великими масами і габаритонулий об’єкт, значно занурений в мул (як, напритами, частково або цілком занурених у ґрунт. клад, в Азовському морі, де товщина мулу в деПоставлена задача вирішується таким чином. яких районах досягає більше 30м). Підводний апарат містить міцні корпуси, розташоСутність корисної моделі пояснюється рисунвані на рамі легкого корпусу, у якій розміщені гоками: ловні баластові цистерни і рушійно-рульовий ком- на Фіг.1 - схема підводного апарата з носоплекс, встановлений у кормі, що має рушії і їхні вим і кормовим вантажозахватними пристроями з приводи, зв’язані з енергетичною установкою. На роздільними робочими понтонами, вид збоку; рамі закріплені носові телекамери, світильники, - на Фіг.2 - схема підводного апарата з маніпулятори, носовий вантажозахватний пристрій об’єднаними робочими понтонами для носового і у виглядігрейфера з лапами, розміщеними на осі, кормового вантажозахватних пристроїв, вид збоку; з’єднаної через підшипники з рамою і встановле- на Фіг.3 - схема підводного апарата з вантаної в носовій частині підводного апарата, важеляжозахватними пристроями у вигляді грейферів, ми, з’єднаними з робочими понтонами, розташолапи яких розведені (затонулий об’єкт показаний ваними по правому і лівому бортах підводного умовно); апарата. Робочі понтони розділені пружною мем- на Фіг.4 - схема підводного апарата з вантабраною на верхню і нижню порожнини, причому у жозахватними пристроями у вигляді грейферів, верхній порожнині, виконаній у вигляді лійки, розлапи яких зведені на затонулому об’єкті; міщені елементи позитивної плавучості, а нижні - на Фіг.5 - схема робочого понтона вантажопорожнини сполучені через кінгстони з забортною захватного пристрою; водою і гнучкими шлангами через ресивер - між - на Фіг.6 - схема контейнера для зберігання собою. Верхні порожнини понтонів зв’язані гнучкиелементів позитивної плавучості. ми шлангами з верхньою порожниною контейнера, Підводний апарат містить міцні 1 і легкий 2 кощо містить елементи позитивної плавучості, прирпуси, раму легкого корпуса 3, рушійно-рульовий чому контейнер обладнаний пружною мембраною, комплекс 4, що має рушії 5 та їхні приводи 6, енера нижня порожнина через насос і кінгстон з’єднана гетичну установку 7, які встановлені у кормовій з забортною водою, причому гнучкі шланги постачастині підводного апарата; телекамери 8, світичені керованими клапанами. Підводний апарат льники 9, маніпулятори 10, які встановлені у носододатково постачений кормовим вантажозахватвій та кормовій частинах підводного апарата (Фіг.1, ним пристроєм у вигляді грейфера з лапами, роз2). Підводний апарат постачений вантажозахватміщеними на осі, з’єднаної через підшипники з ними пристроями: носовим 11 і кормовим 12 у вирамою і встановленої в кормовій частині підводногляді грейферів з лапами 13 для захоплення затого апарата, важелями, з’єднаними з робочими нулого довгомірного об’єкта 14, причому лапи 13 понтонами, розташованими по правому і лівому мають вісь 15 (Фіг.3, 4). Вісь 15 з’єднана через бортах підводного апарата. Робочі понтони носопідшипники з рамою 3. При цьому лапи 13 мають вого і кормового вантажозахватних пристроїв 5 26179 6 важелі 16, що з’єднані з робочими понтонами 17. для забезпечення його наступного захоплення. Робочий понтон 17 розділений пружною мембраПісля наведення підводного апарата на затонулий ною 18 на верхню і нижню порожнини, причому у довгомірний об’єкт 14, відкривають кінгстони (20), верхній порожнині розміщені елементи позитивної через керовані клапани (27) і за допомогою насоса плавучості 19 у вигляді порожніх керамічних чи 26 здійснюють подачу забортної води в контейнер скляних куль, а нижні порожнини сполучені через 24. При цьому пружна мембрана 25 давить на кінгстон 20 із забортною водою і гнучким шлангом елементи позитивної плавучості 19, застосовані у 21 через ресивер 22 - між собою (Фіг.5). Верхня вигляді порожніх керамічних чи скляних куль, розпорожнина робочого понтону 17 зв’язана гнучким ташованих у верхній порожнині контейнера 24 рашлангом 23 з верхньою порожниною контейнера зом з робочою рідиною і переміщує їх через керо24, що містить елементи позитивної плавучості 19 вані клапани (28) і гнучкі шланги (23) у верхні (Фіг.5, 6). Контейнер 24 має пружну мембрану 25, а порожнини робочих понтонів (17). Причому пружні нижня порожнина контейнера через насос 26 і кінмембрани (18) змінюють своє положення і видавгстон 27 з’єднана із забортною водою, причому люють забортну воду через кінгстони (20) з нижніх гнучкий шланг 23 постачений керованим клапаном порожнин робочих понтонів (17), змінюючи їхню 28 (Фіг.6). Головні баластові цистерни (29) знахоплавучість з негативної на позитивну. При цьому дяться по бортах апарата. У районі вантажозахвакількість елементів позитивної плавучості 19 у тного пристрою розташовано водомет 30, признаверхніх порожнинах робочих понтонів (17) зрівнючений для очищення від мулу затонулого ється за рахунок вирівнювання тиску в нижніх подовгомірного об’єкта 14. Верхні порожнини роборожнинах робочих понтонів (17), з’єднаних між чих понтонів 17 і контейнера 24 заповнені робочою собою гнучкими шлангами (21) через ресивер 22. рідиною, у вигляді олії чи забортної води, для того Отримавши позитивну плавучість, робочі понтони щоб не руйнувались елементи позитивної плаву(17) прагнуть спливти і, таким чином, впливають чості. Носовий і кормовий вантажозахватні прина важелі (16), повертаючи їх на осі (15), з’єднаної строї разом з телекамерами, світильниками, манічерез підшипники з рамою легкого корпуса 3 у нипуляторами, що забезпечують процес пошуку і жній її носовій і кормовій частинах. При цьому вапідйому затонулого об’єкта, виконані ідентично. желі (16) зближуються і переміщують лапи (13) Як вантажозахватний пристрій може бути завантажозахватних пристроїв 11 і 12 у вигляді стосований грейфер з лапами, розташованими на грейферів, що входять у ґрунт морського дна і осі, який наведено у книзі А.И. Фигичева, Ю.В. Васходяться під затонул им довгомірним об’єктом 14. сильєва, Г.К. Крилова, А.В. Ситина, B.C. ЯстребоТаким чином, відбувається захоплення затонулого ва. Аварійно-рятувальні і суднопіднімальні засоби. довгомірного об’єкта 14, що контролюється за до-Л.: Суднобудування, 1979 [див. мал. 8.2 на помогою телекамер (8), світильників (9). При необстор.170]. Як елементи позитивної плавучості мохідності очищення затонулого довгомірного об’єкту жна застосувати сферичні пустотілі заповнювачі з від мулу чи забруднень можна скористатися водокераміки [див. Бугаенко Б.А., Галь А.Ф. Способи метами (30), розташованими в носовій і кормовій підйому затонулих об’єктів з використанням піднікінцевостях підводного апарата. Потім за допомомальних модулів із твердих пустотілих наповнюгою системи повітря високого тиску продувають вачів. Суднобудування. 1993. №10. - с.11-14]. головні баластові цистерни (29) і підводний апаПідводний апарат працює в такий спосіб. рат, отримавши позитивну плавучість, спливає на Підводний апарат, що містить міцні корпуси 1, поверхню води, де за допомогою легких водолазів легкий корпус 2 і раму легкого корпуса 3, при запоі звичайних спускопідіймальних засобів здійснювненні забортною водою головних баластових циється звільнення підводного апарата від затонулостерн (29), змінює плавучість з позитивної на негаго довгомірного об’єкта 14. Позитивний ефект дотивну і здійснює занурення у воду до затонулого сягається тим, що підводний апарат постачений довгомірного об’єкта 14 за допомогою рушійноносовим і кормовим вантажозахватними пристрорульового комплексу 4, що має рушії 5 і його приями, виконаними у вигляді грейферів з лапами, від 6, а також енергетичну установку 7. Для наверозташованими на осі, що дозволяє виконувати дення підводного апарата на затонулий довгомірпідводні роботи по захопленню затонулих довгоміний об’єкт 14 використовуються телекамери (8) і рних об’єктів великої маси і габаритів, частково чи світильники (9). За допомогою маніпулятора 10 цілком занурених у ґрунт, і їхній підйом на поверхпідводний апарат здійснює переміщення різних ню води при значному хвилюванні моря. перешкод на затонулому довгомірному об’єкті 14 7 26179 8 9 26179 10 11 Комп’ютерна верстка О. Рябко 26179 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUndersea vehicle
Автори англійськоюBlintsov Volodymyr Stepanovych, Buhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych, Baidushyna Tetiana Ivanivna, Ivoniuk Mykhailo Vasyliovych, Dubina Maryna Oleksandrivna
Назва патенту російськоюПодводный аппарат
Автори російськоюБлинцов Владимир Степанович, Бугаенко Борис Андреевич, Галь Анатолий Феодосьевич, Байдушина Татьяна Ивановна, Ивонюк Михаил Васильевич, Дубина Марина Александровна
МПК / Мітки
МПК: B63G 8/00
Код посилання
<a href="https://ua.patents.su/6-26179-pidvodnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат</a>
Підводний апарат

Номер патенту: 20209
Опубліковано: 15.01.2007
Автори: Бугаєнко Борис Андрійович, Дубіна Марина Олександрівна, Блінцов Володимир Степанович, Галь Анатолій Феодосійович
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, який містить міцний і легкий корпуси, раму, головні баластні цистерни у легкому корпусі, рушійно-рульовий комплекс, розміщений у корпусі підводного апарата, має рушії і їх приводи, енергетичну установку, що зв'язана з приводами рушіїв, систему керування у міцному корпусі, телекамери, світильники, що розміщені у носовій частині підводного апарата на рамі, маніпулятори у нижній частині легкого корпусу, аварійно-сигнальний буй,...
Підводний апарат-транспортувальник
Номер патенту: 20094
Опубліковано: 15.01.2007
Автори: Галь Анатолій Федосійович, Дубіна Марина Олександрівна, Бугаєнко Борис Андрійович, Андрейчикова Ганна Юріївна
МПК: B63G 8/00
Мітки: апарат-транспортувальник, підводний
Формула / Реферат:
Підводний апарат-транспортувальник, який містить міцний корпус, що складається з носового, центрального і кормового відсіків у вигляді послідовно з'єднаних порожнистих сфер і/або порожнистих циліндрів із сферичними кінцевими частинами, поміщених в легкий корпус, енергетичну установку в кормовому відсіку, рушійно-рульовий комплекс з системою керування, цистерни головного баласту, багатоступеневий маніпулятор, балони повітря високого тиску,...
Підводний апарат з плавцевим рушієм

Номер патенту: 49237
Опубліковано: 16.09.2002
Автори: Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
Мітки: підводний, рушієм, плавцевим, апарат
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни поворотного типу, який відрізняється тим, що в корпусі апарата виконані виїмки, в яких встановлені пластини з можливістю їх повороту навколо поздовжньої осі корпусу апарата, а в тілі головного плавцевого рушія додатково розміщено електродвигун, з’єднаний кронштейном з додатковим плавцевим рушієм з можливістю його коливання у площині,...
Рятувальний підводний апарат

Номер патенту: 16642
Опубліковано: 15.08.2006
Автори: Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63G 8/00, B63C 9/00, B63B 3/13
Мітки: рятувальний, підводний, апарат
Формула / Реферат:
1. Рятувальний підводний апарат, що містить міцний корпус у вигляді послідовно сполучених порожнистих сфер, поміщених в легкий корпус, а одна з сфер забезпечена основною камерою присоса, розташованою в нижній частині сфери, який відрізняється тим, що забезпечений додатковими бічними камерами присоса.2. Рятувальний підводний апарат за п. 1, який відрізняється тим, що основна камера присоса розташована в центральній сфері міцного...
Підводний апарат
Номер патенту: 22027
Опубліковано: 10.04.2007
Автори: Блінцов Володимир Степанович, Бугаєнко Борис Андрійович, Дубіна Марина Олександрівна, Штефирца Анна Іллівна, Галь Анатолій Феодосійович
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової і кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/чи циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного чи декількох центральних маршових...
Попередній патент: Стаціонарний стенд для складання і ремонту сталеплавильних конвертерів
Наступний патент: Спосіб формування клапанного гастроентероанастомозу
Випадковий патент: Застосування екстракту трави герані великокорневищної як засобу із протизапальною та знеболюючою активністю