Спосіб визначення азимуту
Номер патенту: 8694
Опубліковано: 15.08.2005
Автори: Шкляр Володимир Петрович, Шервашидзе Олексій Володимирович, Шервашидзе Володимир Варламович, Макарчук Володимир Федорович
Формула / Реферат
1. Спосіб визначення азимута орієнтирного напрямку, що полягає у вимірі проекцій ωx, ωy, ωz кутової швидкості обертання Землі ω й проекцій gx, gy, gz прискорення сили тяжіння Землі g на вимірювальні осі датчиків кутової швидкості й акселерометрів колінеарних і жорстко зв'язаних з осями OX, OY, OZ об'єкта, який відрізняється тим, що вибирають осі, азимути яких підлягають вимірюванню (вимірювальні осі), проектують складові вектора кутової швидкості обертання Землі на площину горизонту, на осі ОХ1, OY1, OZ1:

де: α, β, γ- кути відхилення осей OX, OY, OZ щодо площини горизонту відповідно, знаходять кути Ψ1, Ψ2, Ψ3 між проекціями вимірювальних осей на площині горизонту ОХ1 та OY1, ОХ1 та OZ1, OY1 та OZ1 відповідно по формулах:
обчислюють значення проекцій вектора кутової швидкості обертання Землі на позитивні напрямки проекцій вимірювальних осей в площині горизонту ![]() та відмінних від них на 90° проекцій
та відмінних від них на 90° проекцій ![]() (при русі проти годинникової стрілки, якщо дивитися з кінця позитивного напрямку вертикалі місця розташування) за формулами:
(при русі проти годинникової стрілки, якщо дивитися з кінця позитивного напрямку вертикалі місця розташування) за формулами:



обчислюють поточні й порівнюють із еталонними значеннями модулі кутової швидкості обертання Землі, прискорення сили тяжіння Землі й значення широти місця експлуатації по формулах:
 ,
,
де, nω - прийняте розрахункове значення припустимої відносної погрішності виміру модуля кутової швидкості обертання Землі,
 ,
,
де: ng - прийняте розрахункове значення припустимої відносної погрішності виміру модуля сили тяжіння Землі,
|φ-φeт|≤ φдоп,
де:  - поточне значення широти місця експлуатації об'єкта,
- поточне значення широти місця експлуатації об'єкта,
![]() - еталонне значення широти місця експлуатації об'єкта;
- еталонне значення широти місця експлуатації об'єкта;
![]() - допустиме значення погрішності визначення широти місця експлуатації об'єкта,
- допустиме значення погрішності визначення широти місця експлуатації об'єкта,
при виконанні умов порівняння поточних значень широти місця експлуатації та модулів кутової швидкості обертання Землі і прискорення сили тяжіння Землі з відповідними еталонними значеннями, шуканий азимут визначають по формулі:
![]() ,
,
де: ![]() - азимут осі ОХ (ОY, ОZ);
- азимут осі ОХ (ОY, ОZ);
![]() якщо
якщо ![]() ,
,
![]() якщо
якщо ![]() ,
,
![]() якщо
якщо ![]() .
.
2. Спосіб за п. 1, який відрізняється тим, що за вимірювальну вісь вибирають будь-яку вісь об'єкта, що не збігається з вертикаллю місця.
Текст
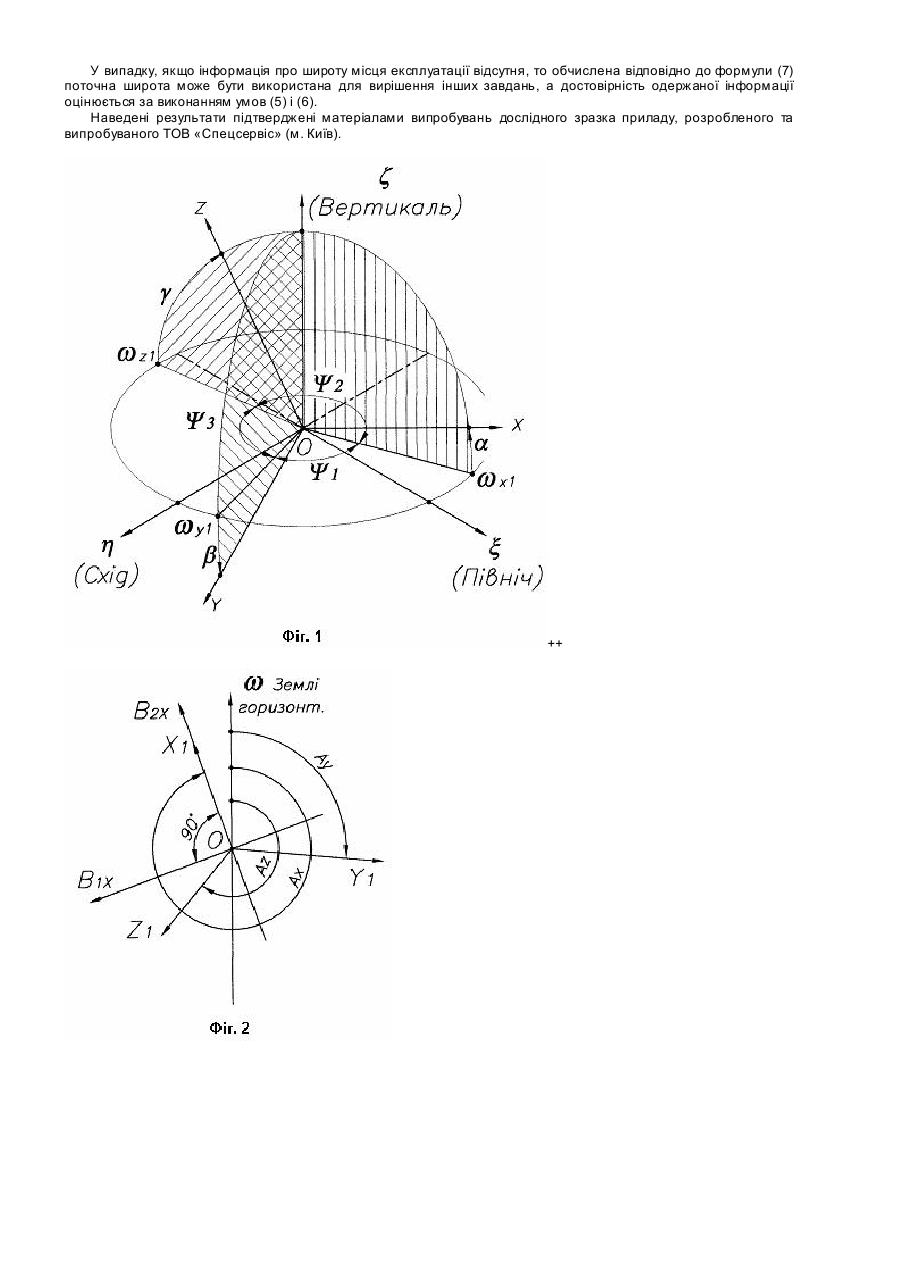
Корисна модель належить до вимірювальної техніки, зокрема, до приладобудування і може бути використана в різних об'єктах для здійснення автономного азимутального орієнтування, або визначення азимута орієнтирного напрямку, наприклад, при здійсненні геодезичних робіт, у будівництві, робототехніці, для визначення азимутальної орієнтації стаціонарних і рухомих (на стоянці) об'єктів, при проведенні інклінометричних досліджень різних свердловин тощо. З рівня техніки відомий спосіб визначення азимута за допомогою пристрою, побудованого за принципом безплатформної інерційної навігаційної системи (БІНС) [Суминов В.М., Галкин Д.В. "Математическая модель гироскопического инклинометра", Изв. ВУЗов, Приборостроение, 1999г., т.42, №3-4], прийнятий авторами за прототип. Зазначений спосіб дозволяє визначати азимут довільно орієнтованої в просторі вимірювальної осі об'єкта, і полягає у вимірі проекцій кутової швидкості обертання Землі і проекцій прискорення сили тяжіння Землі на вимірювальні осі датчиків кутової швидкості (ДКШ) та акселерометрів колінеарних і жорстко пов'язаних з осями OX, OY, OZ об'єкта. При цьому шуканий азимут осі OZ об'єкта розраховують за формулою: g(w xgy - w yg x ) A = a rctg (1) wx gx gz + wy gy gz - w z (g2 + g2 ) x y де g, gx, gy, gz - модуль прискорення сили тяжіння Землі, а також проекції прискорення сили тяжіння Землі на вимірювальні осі OX, OY, OZ об'єкта відповідно; wx, w у, wz. - проекції кутової швидкості обертання Землі на вимірювальні осі об'єкта OX, OY, OZ відповідно. Зазначений спосіб виміру азимута має наступні недоліки: - можливість використання для визначення азимута лише однієї осі (у даному випадку вісь OZ), пов'язаної з об'єктом вимірювань, що може привести до втрати азимутальної орієнтації об'єкта у випадку збігу вимірювальної осі з вертикаллю місця; - відсутність можливості контролю достовірності первинної інформації, вимірюваної ДКШ та акселерометрами, і як наслідок, достовірності виміру азимута. Задачею запропонованої корисної моделі є створення способу виміру азимута, що дозволяє визначати азимути осей об'єкта OX, OY, OZ із здійсненням контролю достовірності первинної інформації, вимірюваної ДКШ та акселерометрами і, як наслідок, забезпечення достовірності виміру азимутів. Поставлена задача досягається шляхом створення способу визначення азимута орієнтирного напрямку, що полягає у що полягає у вимірі проекцій wx, w у, wz кутової швидкості обертання Землі w й проекцій gx, gy, gz прискорення сили тяжіння Землі g на вимірювальні осі датчиків кутової швидкості й акселерометрів колінеарних і жорстко пов'язаних з осями OX, OY, OZ об'єкта. При цьому, відповідно до запропонованої корисної моделі, обирають осі об'єкта, азимути яких підлягають вимірюванню (вимірювальні осі). Проектують складові вектора кутової швидкості обертання Землі на площину горизонту, на осі ОХ1, OY1, OZ 1: ìw x1 = w x cos a, ï íw y1 = w y cos b, (2) ï îw z1 = w z cos g, де: a, b, g - к ути відхилення осей OX, OY, OZ щодо площини горизонту відповідно. Знаходять кути y 1, y 2, y з мiж проекціями вимірювальних осей на площині горизонту ОХ1 та OY1, ОХ1 та OZ 1, OY1 та OZ 1 відповідно по формулах: y 1 = arccos(- tga × tgb ), y 2 = arccos(- tga × tgg ), (3) y 3 = arccos(- tgb × tgg), Обчислюють значення проекції кутової швидкості обертання Землі на позитивні напрямки проекцій вимірювальних осей в площині горизонту B2x, B2y, B2z , та відмінних від них на 90° проекцій B1x, B1y, B 1z (при русі проти годинникової стрілки, якщо дивитися з кінця позитивного напрямку вертикалі місця розташування) за формулами: ì ïB1X = - wy1 siny1signg + w z1 siny 2signb í ïB2 X = wx1 + w y1 cos y1 + w z1 cosy 2 î ì ïB1Y = w x1 siny1signg + wz1 siny 3 signa í (4) ï îB2 Y = wx1 cos y 1 + wy1 + wz1 cos y 3 ìB1Z = - w x1 siny 2 signb + w y1 siny 3 signa ï í ïB2 Z = w x1 cos y 2 + w y1 cos y 3 + w z1 î Обчислюють поточні й порівнюють із еталонними значеннями модулі кутової швидкості обертання Землі, прискорення сили тяжіння Землі й значення широти місця експлуатації по формулах: 2 2 2 wx + wy + wz - w w £ n w (5) де, nw - прийняте розрахункове значення припустимої відносної помилки виміру модуля кутової швидкості обертання Землі. 2 2 2 gx + gy + gz - g g = sin2 a + sin2 b + sin2 g - 1 £ n g , (6) n де: g - прийняте розрахункове значення припустимої відносної помилки виміру модуля сили тяжіння Землі. j - j em £ Dj доп , (7) æ ö ç w x sin a + w y sin b + w z sin g ÷ j = arctgç ÷ - поточне значення широти місця експлуатації об'єкта де: ç ÷ B2X( Y, Z ) + B2 X( Y, Z) 1 2 è ø j еm - еталонне значення широти місця експлуатації об'єкта; j доп - припустиме значення погрішності визначення широти місця експлуатації об'єкта; При виконанні умов порівняння поточних значень модуля кутової швидкості обертання Землі, прискорення сили тяжіння Землі та значення широти місця експлуатації з відповідними еталонними значеннями шуканий азимут визначають за формулою: æB ö A X( Y , Z) = p × k + a rctgç 1X( Y, Z) ÷ ç B 2 X( Y, Z) ÷ è ø , (8) A де X( Y , Z ) - азимут осі ОХ, або OY, або OZ; k = 0, якщо k = 1, якщо B1X( Y, Z ) > 0 та B 2X( Y, Z ) > 0 , B2 X( Y, Z ) < 0 , k = 2, якщо B1X( Y , Z ) 0 . При цьому, відповідно до запропонованої корисної моделі, за вимірювальну вісь обирають будь-яку вісь об'єкта, що не збігається з вертикаллю місця. Запропонована корисна модель ілюструється доданими фігурами. На Фіг.1 наведене просторове положення опорної географічної системи координат O xhz та пов'язаної з об'єктом системи координат OXYZ, де a, b, g - к ути відхилення осей OX, OY, OZ щодо площини горизонту відповідно, y 1, y 2, y з - кути між слідами вимірювальних осей OX-OY, OX-OZ, OY-OZ на площину горизонту відповідно, wx1, w у1 , wz 1 – складові вектора кутової швидкості обертання Землі в площині горизонту на осі OX1 Y1Z1 . На Фіг.2 наведена схема розташування осей OX1, OY1, OZ 1 і їх азимутальне розташування АХ, АY, AZ щодо напрямку на Північ. Також приведені складові B1X, та B2X, які використовуються при визначенні азимута осі ОХ – AX . Складові B1y, B2y, B1Z , B2Z на фігурі не приведені. На Фіг.3 представлена функціональна схема пристрою, що реалізує запропонований спосіб, що містить: три ДКШ 1, 2, 3; три акселерометри 4, 5, 6; блок керування та обчислення (БКО) 7, що, у свою чергу, складається з блоку керування (БК) 8 та спецобчислювача 9; блок обчислення модуля кутової швидкості обертання Землі 10; блок обчислення модуля прискорення сили тяжіння Землі 11; блок обчислення широти місця експлуатації 12; блок введення констант 13; компаратор 14. ДКШ 1, 2, 3 та акселерометри 4, 5, 6 жорстко закріплені на корпусі 15 приладу. Вимірювальні осі ДКШ 1 та акселерометра 4, ДКШ 2 та акселерометра 5, ДКШ 3 та акселерометра 6 попарно паралельні між собою та колінеарні осям OX, OY, OZ, опорної прямокутної системи координат, пов'язаної з об'єктом. Виходи БК 8 з'єднані із входами ДКШ 1, 2, 3, акселерометрів 4, 5, 6 і спецобчислювача 9, вхід БК 8 з'єднаний з виходом спецобчислювача 9, а входи спецобчислювача 9 з'єднані з виходами ДКШ 1, 2, 3, акселерометрів 4, 5, 6, компаратора 14, входи блоку обчислення модуля кутової швидкості обертання Землі 10 з'єднані з виходами ДКШ 1, 2, 3, входи блоку обчислення модуля прискорення сили тяжіння Землі 11 з'єднані з виходами акселерометрів 4, 5, 6, вхід блоку обчислення широти місця експлуатації 12 з'єднаний з виходом спецобчислювача 9, входи компаратора 14 з'єднані з виходами блоків введення констант 13, обчислення модуля кутової швидкості обертання Землі 10, обчислення модуля прискорення сили тяжіння Землі 11, обчислення широти місця експлуатації 12. Функціональна схема пристрою, що реалізує запропонований спосіб, наведена на Фіг.3. Робота пристрою здійснюється у такий спосіб. Оператор вводить до блоку констант 13 інформацію про еталонні значення кутової (j ет ) швидкості обертання Землі (w), прискорення сили тяжіння Землі (g) і широті місця експлуатації , потім за допомогою БК 8 видає команди на включення спецобчислювача 9, ДКШ 1, 2, 3 та акселерометрів 4, 5, 6. По закінченні вимірювального циклу, що визначається за таймером (на фігурі не показаний) спецобчислювача 9, БК робить опитування ДКШ 1, 2, 3 та акселерометрів 4, 5, 6. Одержана з первинних датчиків інформація надходить на відповідні входи спецобчислювача 9 та до блоків обчислення модулів кутової швидкості обертання Землі 10, прискорення сили тяжіння Землі 11. Відповідно до формул (2-4, 8) за допомогою спецобчислювача 9 визначають шукані азимути осей ОХ (AX), OY (AY), OZ (AZ). Одночасно за допомогою блоків 10, 11, 12 обчислюють визначені приладом поточні значення широти місця експлуатації, модулі швидкості обертання Землі, прискорення сили тяжіння Землі та порівнюють їх з еталонними значеннями. При виконанні умов (5-7) результати вимірів вважаються достовірними, у іншому випадку - ні. Таким чином, запропоновані спосіб дає можливість одночасно визначати азимути осей ОХ, OY, OZ, що дозволяє постійно мати інформацію про азимутальну орієнтацію об'єкту. Зважаючи на те, що виміряна ДКШ та акселерометрами інформація дозволяє визначити кутову швидкість обертання Землі, прискорення сили тяжіння Землі та широту місця установки приладу, то порівнюючи обчислені константи з їхніми еталонними значеннями, які апріорі відомі, можна з високою точністю судити про достовірність одержаної інформації. У випадку, якщо інформація про широту місця експлуатації відсутня, то обчислена відповідно до формули (7) поточна широта може бути використана для вирішення інших завдань, а достовірність одержаної інформації оцінюється за виконанням умов (5) і (6). Наведені результати підтверджені матеріалами випробувань дослідного зразка приладу, розробленого та випробуваного ТОВ «Спецсервіс» (м. Київ). ++
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining azimuth
Назва патенту російськоюСпособ определения азимута
МПК / Мітки
МПК: G01P 9/00
Мітки: визначення, азимуту, спосіб
Код посилання
<a href="https://ua.patents.su/4-8694-sposib-viznachennya-azimutu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення азимуту</a>
Спосіб вимірювання азимуту повітряних цілей
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: спосіб, повітряних, вимірювання, азимуту, цілей
Формула / Реферат:
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Спосіб визначення орієнтації осі свердловини

Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Карпачов Юрій Андрійович, Гусєв Олексій Володимирович, Анупрієнко Генадій Єфремович, Рудик Юрій Микитович
МПК: E21B 47/00, G01C 9/00, E21B 47/02
Мітки: свердловини, орієнтації, осі, визначення, спосіб
Формула / Реферат:
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: місця, рлс, трикоординатної, азимуту, кута, вимірювач
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Спосіб визначення приведеного моменту інерції механізму
Номер патенту: 42988
Опубліковано: 15.11.2001
Автори: Поджаренко Андрій Володимирович, Кулаков Павел Ігоревич, Кухарчук Василь Васильович, Кучерук Володимир Юрійович
МПК: G01M 1/10
Мітки: моменту, приведеного, інерції, механізму, визначення, спосіб
Формула / Реферат:
Спосіб визначення приведеного моменту інерції механізму, який включає розгін механізму і перевод його в стан самогальмування з почерговою установкою на вихідний вал механізму двох зразкових моментів інерції, ідентичних за формою і відмінних по щільності матеріалу, з наступною реєстрацією інформативних параметрів і обчисленням приведеного моменту інерції, який відрізняється тим, що як інформативні параметри реєструють кутову швидкість у...
Секвентний вимірювач азимуту рухомої цілі з пристроєм захисту від пасивних перешкод
Номер патенту: 17460
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: пристроєм, цілі, азимуту, секвентний, рухомої, пасивних, вимірювач, перешкод, захисту
Формула / Реферат:
Секвентный измеритель азимута движущейся цели с устройством защиты от пассивных помех, содержащий разнесенные по горизонтали на расстояние d первую приемо-передающую антенну с антенным переключателем и вторую приемную антенну, первый и второй приемники этих антенн и передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что на выходах первого и второго приемников установлены соответственно...
Попередній патент: Шаруватий сталевий матеріал для монет
Наступний патент: Оправа окулярів для корекції далекозорості та короткозорості
Випадковий патент: Пробіжна машина для випробовування канатів