Автоматичний магнітний захват
Номер патенту: 9533
Опубліковано: 30.09.1996
Формула / Реферат
Автоматический магнитный захват, содержащий навешиваемый на крюк крана ползун четырехтактного механизма фиксации, основной корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно прикрепленные к основному корпусу отжимные рычаги и тяги, одним концом шарнирно прикрепленные к большим плечам рычагов, малые плечи которых снабжены роликами, отличающийся тем, что захват снабжен дополнительным корпусом, охватывающим боковую поверхность основного корпуса и выполненным с возможностью вертикального перемещения относительно последнего при ограниченном перемещении вниз и силового взаимодействия, с одной стороны, с поверхностью транспортируемого груза, а с другой стороны, с роликом каждого рычага, причем рычаги расположены по разные стороны от ползуна и шарнирно соединены с верхней частью основного корпуса, а другие концы тяг шарнирно соединены с концами перекладины, жестко прикрепленной к ползуну, причем перекладина выполнена из двух частей, одна из которых прикреплена к ползуну с одной стороны ползуна, а другая прикреплена с другой стороны ползуна, а в каждой из них выполнено отверстие для установки оси фиксации промежуточного стропа.
Текст
Изобретение относится к грузозахватным устройствам на постоянных магнитах и может быть использовано для транспортировки ферромагнитных изделий. Наиболее близким к заявляемому является автоматический магнитный захват, содержащий навешиваемый на крюк крана ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно прикрепленные к корпусу посредством горизонтальных осей отжимные рычаги, тяги, шарнирно соединенные одним концом с ползуном, а другим концом с большими плечами рычагов, малые плечи которых соединены шарнирно с роликами. Захват - прототип не обеспечивает освобождение длинномерных грузов, типа уголков, прутков, тр уб и т.п. в случае расположения их параллельно отжимным роликам, что требует при захвате груза ориентации магнитного захвата в положение, при котором груз будет расположен перпендикулярно отжимным роликам. Это снижает эксплуатационные возможности захвата, В основу изобретения поставлена задача усовершенствования автоматического магнитного захвата путем изменения конструкции механизма отрыва с тем, чтобы обеспечить захват и освобождение длинномерного груза при любой ориентации магнитной системы относительно последнего. Поставленная задача решается тем, что в автоматическом магнитном захвате, содержащем навешиваемый на крюк крана ползун четырехтактного механизма фиксации, основной корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно прикрепленные к основному корпусу отжимные рычаги и тяги, одним концом шарнирно прикрепленные к большим плечам рычагов, малые плечи которых снабжены роликами, согласно изобретению, захват снабжен дополнительным корпусом, охватывающим боковую поверхность основного корпуса и выполненным с возможностью вертикального перемещения относительно последнего при ограниченном перемещении вниз и силового взаимодействия, с одной стороны, с поверхностью транспортируемого груза, а с др угой стороны, с роликом каждого рычага, причем, рычаги расположены по разные стороны от ползуна и шарнирно соединены с верхней частью основного корпуса, а другие концы тяг шарнирно соединены с концами перекладины, жестко прикрепленной к ползуну, причем, перекладина выполнена из двух частей, одна из которых прикреплена к ползуну с одной стороны ползуна, а другая прикреплена с другой стороны ползуна, а в каждой из них выполнено отверстие для установки оси фиксации промежуточного стропа. На фиг.1 изображен автоматический магнитный захват, общий вид; на фиг.2 - то же, вид сверху. Автоматический магнитный захват содержит навешиваемый на крюк крана ползун 1 четырехтактного механизма фиксации, установленный с возможностью вертикального перемещения в основании 2, прикрепленном к основному корпусу 3 с размещенными в нем постоянными магнитами, и механизм стропа, включающий шарнирно прикрепленные к основному корпусу отжимные рычаги 4 и тяги 5, одним концом шарнирно прикрепленные к большим плечам рычагов 4, малые плечи которых снабжены роликами 6 (на фиг.1 для простоты показаны элементы механизма отрыва, расположенные с одной стороны захвата). Захва т снабжен дополнительным корпусом 7, в форме коробки без днища, охватывающим боковую поверхность основного корпуса 3 и выполненным с возможностью вертикального перемещения относительно последнего при ограниченном перемещении вниз за счет ограничителей 8, прикрепленными к дополнительному корпусу 7, и силового взаимодействия, с одной стороны, с поверхностью транспортируемого груза 9, а с другой стороны, с роликом 6 каждого рычага, причем рычаги расположены по разные стороны от ползуна 1 и шарнирно соединены со стойками 10, прикрепленными к основному корпусу 3, а др угие концы тяг 5 шарнирно соединены с концами перекладины 11, которая выполнена из двух частей, одна из которых прикреплена к ползуну 1 с одной стороны ползуна, а другая прикреплена с другой стороны ползуна, а в каждой из них выполнено отверстие для установки оси фиксации промежуточного стропа. Четырехтактный механизм фиксации рычагов от поворота является известным автоматическим переключающим механизмом и в заявляемом устройстве не содержит элементов новизны. Захват работает следующим образом. В исходном состоянии захват подвешен с помощью промежуточного стропа на крюк крана. При этом ползун 1 занимает крайнее верхнее положение, а ролики 6 малых плеч рычагов 4 опираются на ограничители 8 и отжимают дополнительный корпус 7 в крайнее нижнееположение, при котором дополнительный корпус 7 опирается ограничителями 8 на поверхность основного корпуса 3. В таком состоянии захват опускают на поверхность гр уза 9. Первым касается груза дополнительный корпус 7. При этом сила магнитного поля, увеличивающаяся по мере уменьшения расстояния между грузом 9 и магнитной системой основного корпуса 3, передается через ролики 6 на малые плечи рычагов 4, что позволяет осуществи ть плавное опускание основного корпуса 3 на поверхность груза 9 и предотвратить удары захватываемого изделия о поверхность магнитной системы. Основной корпус 3 опускается на поверхность груза 9, который захватывается магнитной системой, ползун 1 опускается в крайнее нижнее положение и при своем ходе осуществляют автоматическую фиксацию рычагов от поворота. Захват с грузом поднимают для транспортировки к месту разгрузки. При этом ползун 1 по принципу действия механизма фиксации частично за счет свободного хода перемещается вверх относительно основания 2 и занимает промежуточное положение, при котором дополнительный корпус 7 опирается на поверхность груза 9, а ролики 6 не взаимодействуют с ограничителями 8. Захват опускают на разгрузочную площадку. Ползун перемещается в крайнее нижнее положение и при своем ходе осуществляет автоматическое переключение механизма фиксации рычагов от поворота, При последующем подъеме захвата ползун при своем движении в крайнее верхнее положение увлекает за собой тяги 5 и рычаги 4, малые плечи которых передают усилие отрыва через ролики б и ограничители 8 дополнительному корпусу 7, который взаимодействует с гр узом 9 и отрывает его от магнитной системы захвата. За хват переносят к месту загрузки и цикл работы повторяется. Наличие дополнительного корпуса 7 в предложенном автоматическом магнитном захвате позволяет приложить к грузу 9 усилие отрыва по всему контуру магнитной системы, что позволяет осуществлять захват и освобождение любых изделий, один из размеров которых не меньше ширины дополнительного корпуса 7. Это упрощает эксплуатацию захвата и делает его более универсальным.
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic magnetic gripping device
Автори англійськоюKozlov Mykhailo Ivanovych, Hordiienko Mykola Ivanovych
Назва патенту російськоюАвтоматический магнитный захват
Автори російськоюКозлов Михаил Иванович, Гордиенко Николай Иванович
МПК / Мітки
МПК: B66C 1/00
Мітки: автоматичний, магнітний, захват
Код посилання
<a href="https://ua.patents.su/3-9533-avtomatichnijj-magnitnijj-zakhvat.html" target="_blank" rel="follow" title="База патентів України">Автоматичний магнітний захват</a>
Автоматичний магнітний захоплювач
Номер патенту: 1836
Опубліковано: 20.12.1994
Автори: Гордієнко Микола Іванович, Козлов Михайло Іванович, Гершенкрой Володимир Леонідович
МПК: B66C 1/00
Мітки: захоплювач, магнітний, автоматичний
Формула / Реферат:
Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма фиксации, отличающийся тем, что, с целью повышения эксплуатационных качеств, отжимные...
Захват маніпулятора

Номер патенту: 7396
Опубліковано: 29.09.1995
Автори: Марченко Володимир Петрович, Брязкало Вадим Вадимович, Ткаченко Іван Павлович, Цейтлін Генріх Юхимович
МПК: B25J 15/00, A21C 15/00
Мітки: захват, маніпулятора
Формула / Реферат:
Захват манипулятора, преимущественно для пирожных, содержащий захватные головки, смонтированные посредством штанг на шарнирно-рычажном механизме и имеющие привод для изменения расстояния между ними, отличающийся тем, что, с целью повышения надежности работы, каждая захватная головка содержит пару двуплечих рычагов, закрепленных на соответствующей штанге шарнирно-рычажного механизма, при этом захватные головки снабжены общим приводом для...
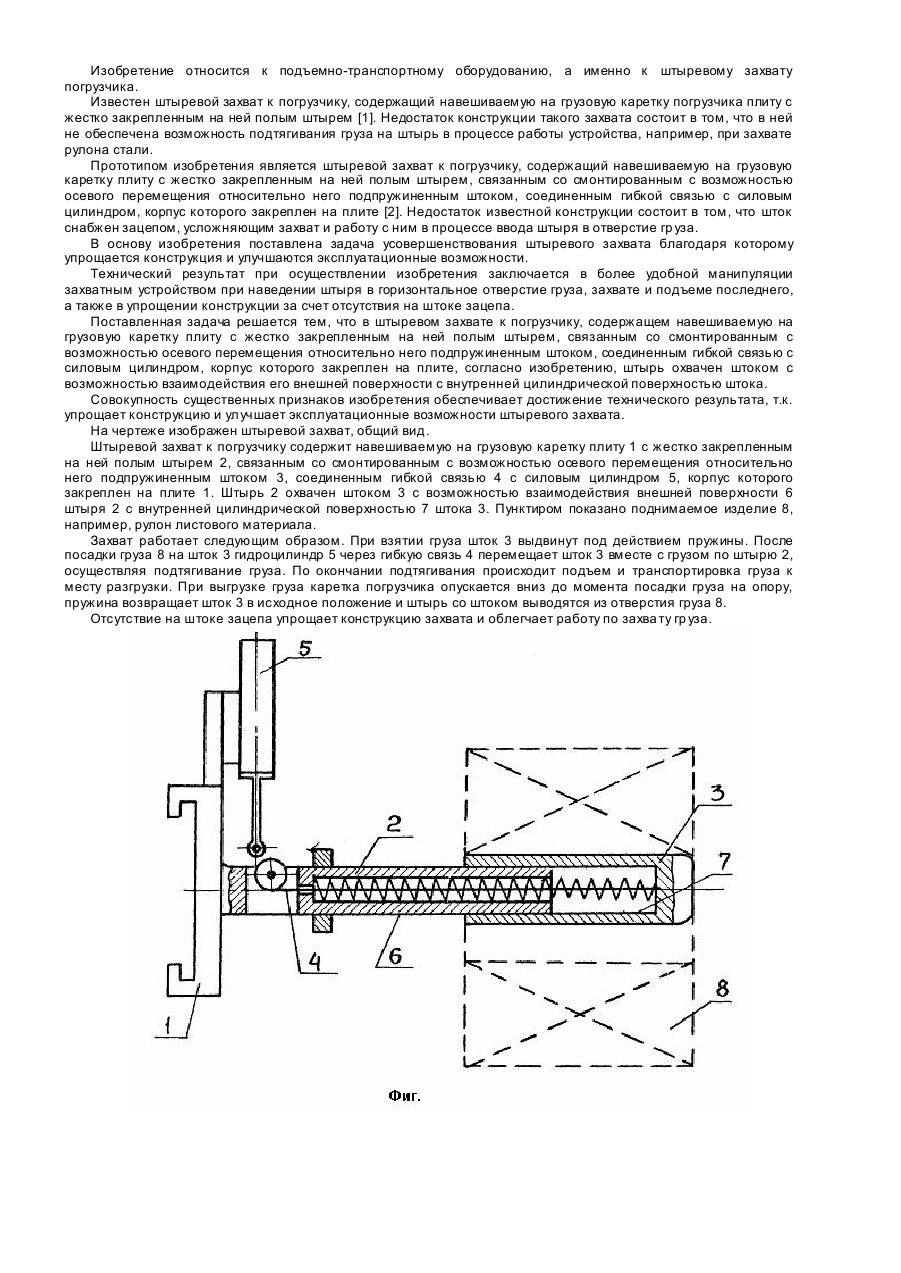
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: штирьовий, навантажувача, захват
Формула / Реферат:
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Автоматичний вимикач
Номер патенту: 1296
Опубліковано: 25.03.1994
Автори: Гущін Владислав Якович, Костюк Володимир Андрійович, Кузнецов Микола Макарович, Постольник Вячеслав Миколайович
МПК: H01H 13/52
Мітки: автоматичний, вимикач
Формула / Реферат:
Автоматический выключатель, содержащий изоляционный корпус, состоящий из двух механически соединенных, установленных одни на другую частей, сопряженных параллельно плоскости крепления выключателя, причем каждая из частей изоляционного корпуса имеет дно, расположенное также параллельно плоскости крепления выключателя, на верхней части изоляционного корпуса укреплена изоляционная крышка, под крышкой на дне этой части укреплены механизм...
Бігові лижі з гальмовим пристроєм
Номер патенту: 6666
Опубліковано: 29.12.1994
Автор: Дьяченко Костянтин Іванович
МПК: A63C 7/00
Мітки: гальмовим, бігові, пристроєм, лижі
Формула / Реферат:
(57) Беговые лыжи с тормозным устройством, каждое из которых содержит основание, клиновидный тормозной элемент и фиксатор тормозного элемента, отличающиеся тем, что каждая из лыж снабжена полым корпусом, основание выполнено с наклонной опорной площадкой, а фиксатор выполнен в виде ползуна, причем полый корпус установлен жестко на основании, тормозной элемент шарнирно закреплен на наклонной опорной площадке с возможностью контактирования с...
Попередній патент: Велосипедний педальний пристрій
Наступний патент: Блокоукладальник
Випадковий патент: Спосіб холодного зварювання тонкостінного чавуну