Захват маніпулятора
Номер патенту: 7396
Опубліковано: 29.09.1995
Автори: Ткаченко Іван Павлович, Цейтлін Генріх Юхимович, Брязкало Вадим Вадимович, Марченко Володимир Петрович

Формула / Реферат
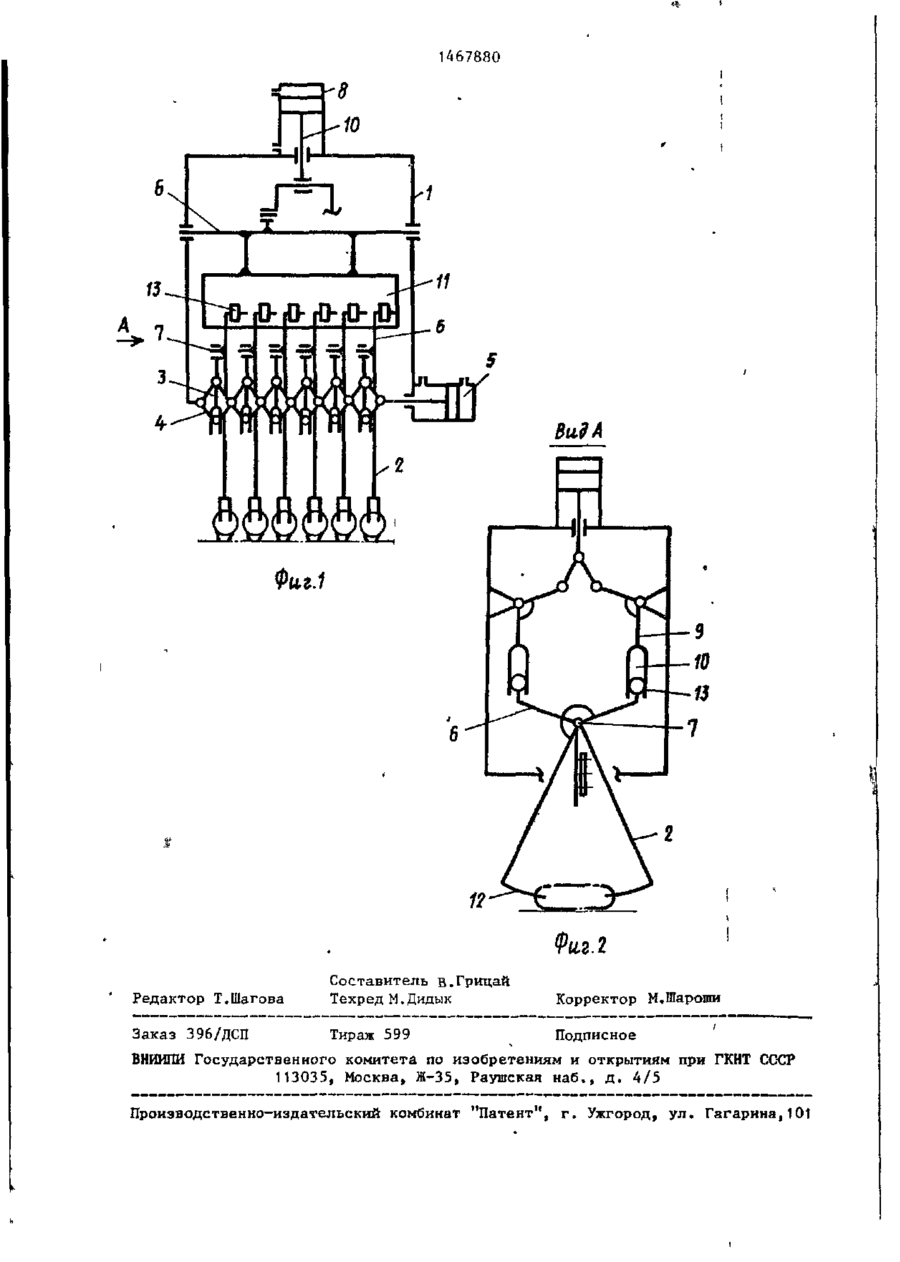
Захват манипулятора, преимущественно для пирожных, содержащий захватные головки, смонтированные посредством штанг на шарнирно-рычажном механизме и имеющие привод для изменения расстояния между ними, отличающийся тем, что, с целью повышения надежности работы, каждая захватная головка содержит пару двуплечих рычагов, закрепленных на соответствующей штанге шарнирно-рычажного механизма, при этом захватные головки снабжены общим приводом для сведения двуплечих рычагов захватных головок, состоящим из силового цилиндра и шарнирно закрепленных на штоке цилиндра промежуточных рычагов, на свободных концах которых закреплены копиры с направляющим желобом, причем на каждом двуплечем рычаге с одного конца установлены иглы, а с другого - ролики, размещенные в направляющем желобе соответствующего копира.
Текст
ДЛЯ СЛУЖЕБНОГО ПОЛЬЗОВАНИЯ ЭКЗ СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИН (П) (19) (51)4 В 25 J 15/00, А 21 С 15/00 ГОСУДАРСТВЕННЫЙ НОМИТЕТ ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ ПРИ ГННТ СССР ОПИСАНИЕ Н АВТОРСКОМУ (21) 4141820/28-13 (22) 03.11.86 (71) Украинский научно-исследовательский и конструкторский институт продовольственного машиностроения (72) Г.Е.Цейтлин, И.П.Ткаченко, В.П. Марченко и В.В.Брязкало (53) 621.798.4(088.8) (56) Авторское свидетельство СССР * 982899, кл. В 25 J 15/00, 1982. Авторское свидетельство СССР № 440304, кл. В 65 В 5/06, 1972. ' ние надежности работы захвата. Захват содержит корпус 1, захватные головки 2, смонтированные на штангах 3, закрепленных на шарнирно-рычажном механизме 4, привод 5 для изменения расстояния между захватными головками 2. Каждая захватная головка 2 содержит пару двуплечих рычагов 6, имеющих общий шарнир 7, закрепленный на соответствующей штаге 3, общий привод для сведения двуплечих рычагов, состоящий из силового цилиндра 8, промежуточных рычагов, шарнирно закрепленных на штоке 10 силового цилиндра 8. На свободных концах промежуточных рычагов закреплены копиры 11. На одном конце каждого двуплечего ры-[ чага установлены иглы, а на другом ролики 13» 2 ил. (54) ЗАХВАТ МАНИПУЛЯТОРА (57) Изобретение относится к оборудованию для упаковки и может быть использовано на предприятиях пищевой промышленности для укладывания групп изделий, например пирожных в коробки. Цель изобретения - повыше 1 Изобретение относится к оборудованию для упаковки и может быть использовано на предприятиях пищевой промышленности для укладывания группы изделий, например пирожных, в коробки. Цель изобретения - повышение надежности работы захвата манипулятора. На фиг.1 изображен предлагаемый захват; на фиг,2 вид по стрелке А на фиг.1. Захват содержит корпус 1, захватные головки 2, смонтированные при помощи штанг 3 на шарнирно-рычажных механизмах 4, привод 5 для измерения расстояния между захватными голов11-89 ками. Каждая захватная головка содержит пару двуплечих рычагов 6, имеющих общий шарнир 7, закрепленный на соответствующей штанге 3 шарнирно-рычажного механизма 4, Захватные головки снабжены общим приводом для сведения двуплечих рычагов захватных головок, состоящим из силового цилиндра 8, промежуточных рычагов 9, шарнирно закрепленных на штоке 10 силового цилиндра 8. На свободных концах промежуточных рычагов 9 закреплены копиры 11 с направляющим желобом. На одном конце каждого двуплечего рычага установлены иглы 12, а на другом - ролики 13, расположенные в желобе соответствующего копира. •г/ , 00 00 1467880 этом желобы в копирах 11 расположеЗахват манипулятора работает слены вертикально, двуплечие рычаги 6 дующим обра з ом. при подъеме по желобу роликов 13 Исполнительный механизм манипуляне изменяют своего положения относитора, на котором закреплен корпус 1 тельно шарнира 7, при этом иголки захвата, опускается к захватываемым 12 на концах рычагов 6 не изменяют изделиям, например пирожным типа своего положения относительно пирож"Эклер". Бри этом шток 10 находится ных. Затем захват с пирожными опусв нижнем положении, а двуплечие рыкается к коробке, шток 10 также опусчаги 6 с иглами 12 развернуты так, 10 кается относительно корпуса 1, рычачто пирожные оказываются между ними. ги 6 расходятся, иглы 12 выходят из Поршень привода 5 находится также пирожных, пирожные остаются в короб"в своем крайнем правом положении. При ке и цикл повторяется. Предлагаемый этом иглы находятся напротив торцов захват надежен в работе, так как пирожных, расположенных в ячейках 15 обеспечивается постоянная кинематиконвейера с постоянным шагом. По коческая связь между звеньями, исклюманде от системы управления манипучается срабатывание захватных рычалятора шток 10 поднимается в верхгов от упора захвата в захватываенее положение (как показано на черімр.е изделие. теже) и иглы 12 входят в пирожное. и з о б р е т е н и я Поскольку с каждой стороны в пирожное 20 Ф о р м у л а входят две иглы, положение пирожного на захватах вполне определенное (при Захват манипулятора, преимущестнеправильной форме пирожного по крайвенно для пирожных, содержащий захней мере три иглы будут его фиксиро25 ватные головки, смонтированные посвать на рычагах 6 ) . Затем манипуляредством штанг на шарнирно-рычажном тор с захватом поднимает пирожные механизме и имеющие привод для измевверх и совершает либо горизонтальное нения расстояния между ними, о т движение, либо поворот для перемещения л и ч а ю щ и й с я тем, что, с их к коробке, в которую следует уло30 целью повышения надежности работы, жить пирожные. Для того, "чтобы пикаждая захватная головка содержит рожные в корбке не сдвигались и не пару двуплечих рычагов^ закреплен- ' переворачивались, они должны нахоных на соответствующей штанге шарнирдиться в ней с минимальным зазором, но-рычажного механизма, при этом меньшим, чем на конвейере. Поэтому захватные головки снабжены общим при горизонтальном движении манипу35 приводом для сведения двуплечих рылятора поршень привода 5 по команде чагов захватных головок, состоящим от системы управления перемещается из силового цилиндра и шарнирно закв крайне левое положение, благодаря репленных на штоке цилиндра промечему шарнирно-рычажные механизмы 4 жуточных рычагов, на свободных консближают между собой штанги 3 и с 40 цах которых закреплены копиры с напними рычаги 6 до нужного расстояния равляющим желобом, причем на каждом между ними. При этом сближении рыдвуплечем рычаге с одного конца чагов 6 шарниры 7 смещаются нескольустановлены иглы, а с другого - роко вверх. С ними вверх по копиру 11 лики, размещенные в направляющем* смещаются ролики 13, поскольку при желобе соответствующего копира. , 1467880 Фиг.1 Фиг.2 Редактор Т,Шагова Составитель в.Грицай Техред М.Дидык Корректор М.Шароши Заказ 396/ДСП Тираж 599 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина,101
ДивитисяДодаткова інформація
Назва патенту англійськоюGrip of manipulator
Автори англійськоюTseitlin Henrikh Yukhymovych, Tkachenko Ivan Pavlovych, Marchenko Volodymyr Petrovych, Briazkalo Vadym Vadymovych
Назва патенту російськоюЗахват манипулятора
Автори російськоюЦейтлин Генрих Ефимович, Ткаченко Иван Павлович, Марченко Владимир Петрович, Брязкало Вадим Вадимович
МПК / Мітки
МПК: B25J 15/00, A21C 15/00
Мітки: захват, маніпулятора
Код посилання
<a href="https://ua.patents.su/4-7396-zakhvat-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Захват маніпулятора</a>
Привод гідродвигуна у виконавчих механізмах кувального маніпулятора
Номер патенту: 1758
Опубліковано: 25.10.1994
Автори: Грабер Павло Михайлович, Гелерман Борис Мусійович
МПК: B21D 43/18
Мітки: кувального, маніпулятора, гідродвигуна, виконавчих, механізмах, привод
Формула / Реферат:
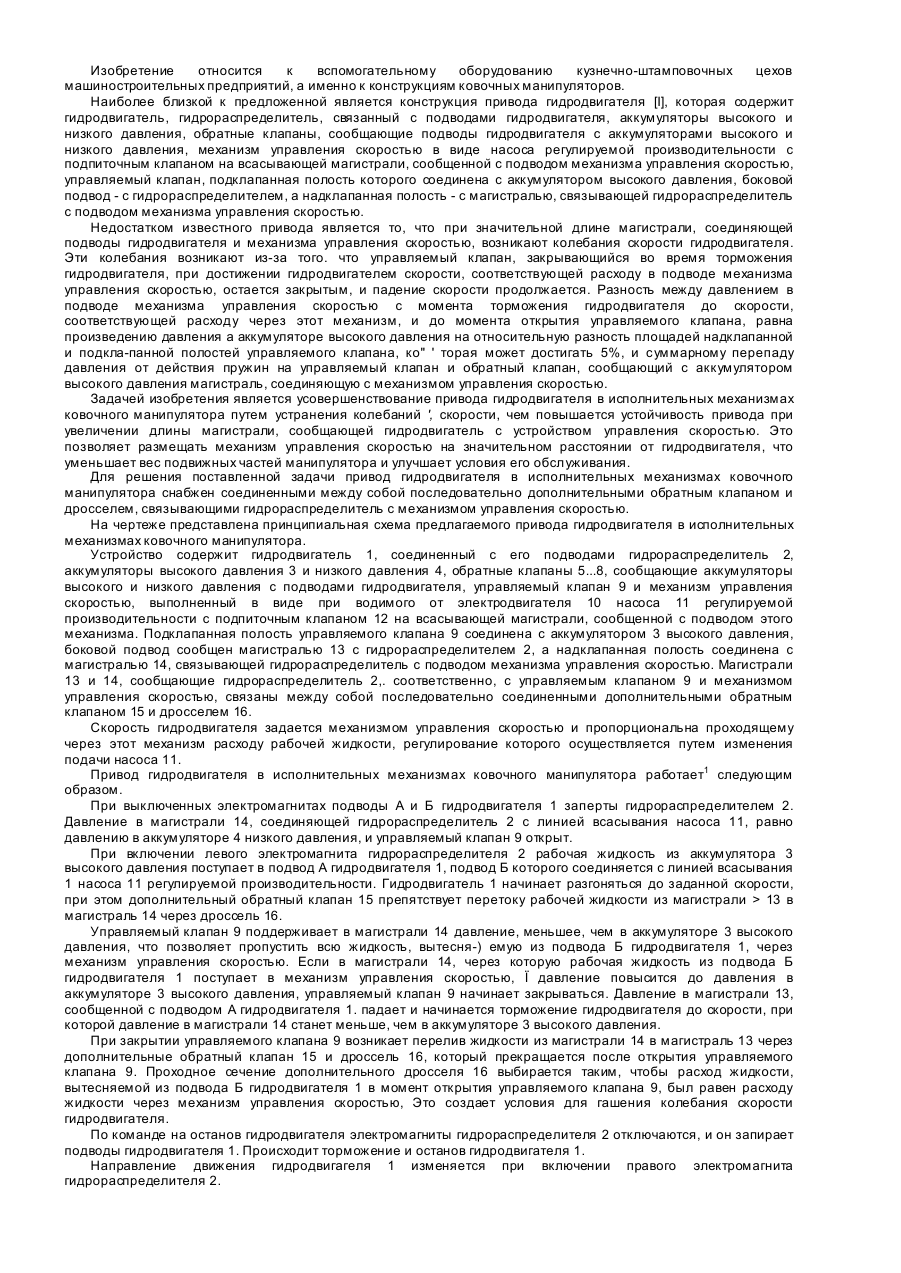
Привод гидродвигателя в исполнительных механизмах ковочного манипулятора, содержащий гидрораспределитель, связанный подводами с гидродвигателем, манипуляторы высокого и низкого давления и обратные клапаны, сообщающие подводы гидродвигателя с аккумуляторами высокого и низкого давления, механизм управления скоростью в виде насоса регулируемой производительности с подпиточным клапаном на всасывающей магистрали, сообщенной с подводом механизма...
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: захват, штирьовий, навантажувача
Формула / Реферат:
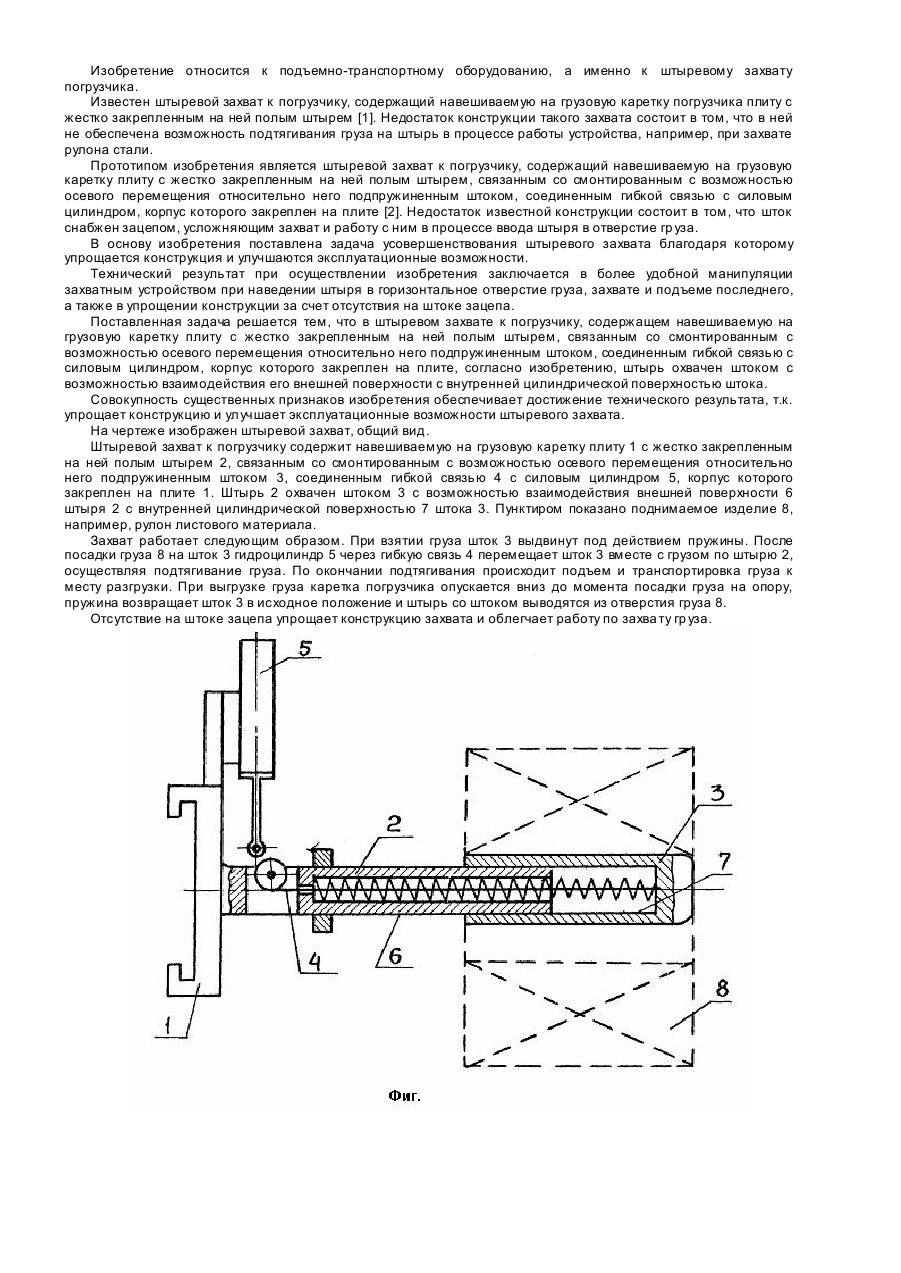
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Вилочний захват для навантажувача
Номер патенту: 5421
Опубліковано: 28.12.1994
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/12
Мітки: навантажувача, захват, вилочний
Формула / Реферат:
(57) Вилочный захват для погрузчика, содержащий каретку, монтируемую на грузоподьмнике погрузчика и несущую вилы, смонтированныес возможностью синхронного вращения их зубьев навстречу друг другу зубчато-реечным механизмом, образованным шестернями, жестко закрепленными на осях вращения указан ных зубьев вил и зацепленных с зубчатыми рейками, выполненными на противолежащих сторонах, установленной с возможностью поперечного...
Маніпулятор
Номер патенту: 6962
Опубліковано: 31.03.1995
Автори: Свистун Віталій Леонідович, Саленко Світлана Василівна, Валюх Володимир Федорович
МПК: B25J 9/02, B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
(57) 1. Манипулятор, содержащий основание, на котором смонтирован вал с механической рукой, в корпусе которой размещен приводной захват, имеющий индивидуальный корпус, а также механизмы подъема и поворота механической руки, отличающийся тем, что он снабжен механизмом автоматической ориентации захвата, выполненным в виде регулируемой тяги, кольца с рычагом и рычага, жестко связанного с корпусом захвата, причем оба рычага шарнирно соединены...
Пристрій для установки на друковані плати радіоелементів, переважно мікросхем
Номер патенту: 4533
Опубліковано: 28.12.1994
Автор: Мояк Олег Федорович
МПК: H05K 13/04
Мітки: плати, мікросхем, пристрій, радіоелементів, друковані, переважно, установки
Формула / Реферат:
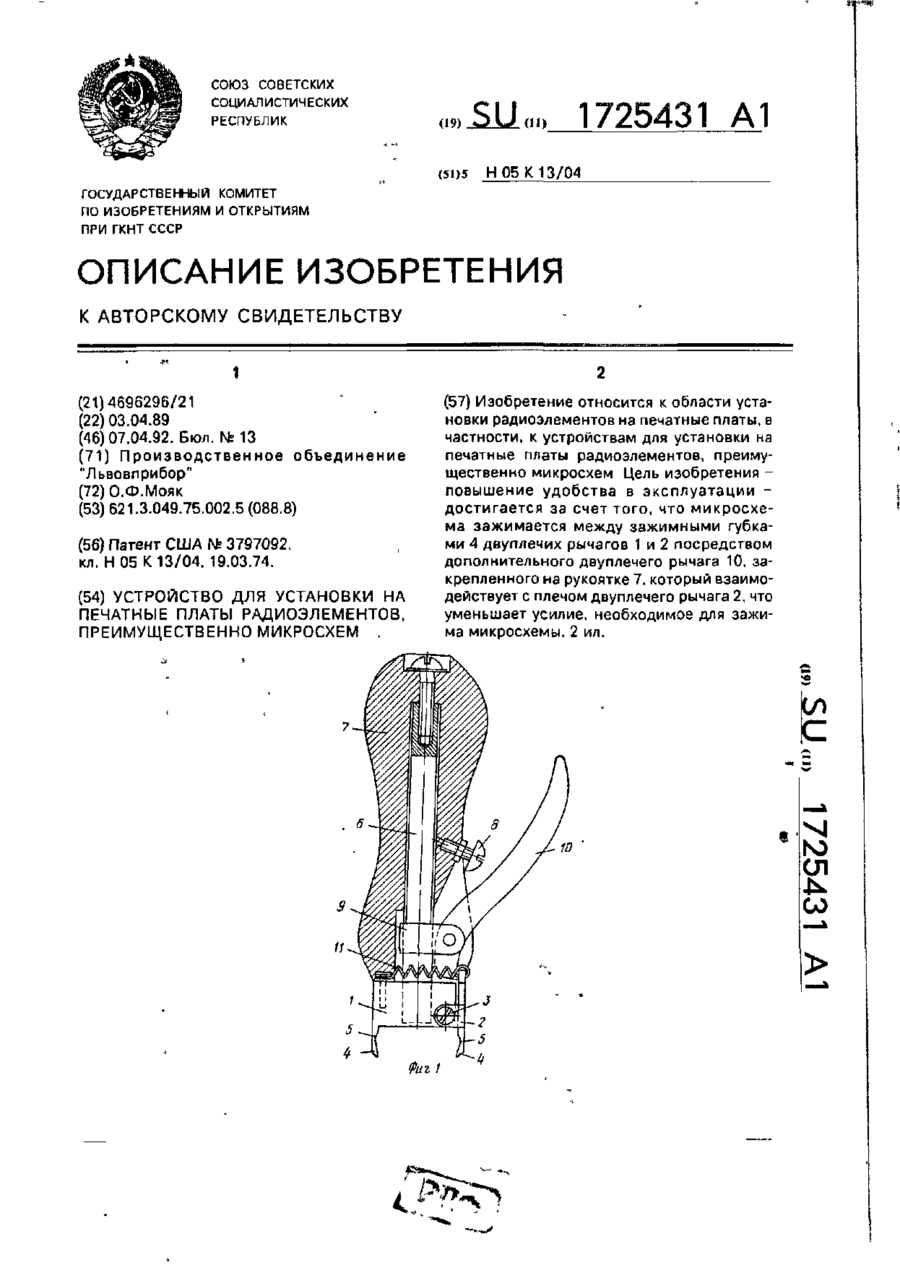
Устройство для установки на печатные платы радиоэлементов, преимущественно микросхем, содержащее два шарнирно соединенных двупле-чих рычага, свободный конец одного из плеч каждого из рычагов выполнен в виде зажимной губки, а другие плечи рычагов подпружинены, при этом одно из подпружиненных плеч рычагов выполнено в виде рукоятки, на которой установлен регулировочный винт, отличающееся тем, что, с целью повышения удобства в эксплуатации,...
Попередній патент: Пристрій для орієнтації штучних вантажів
Наступний патент: Двигун внутрішнього згоряння
Випадковий патент: Спосіб оцінки відновлення функції колінного суглоба у хворих після ендопротезування