Захоплювальний пристрій промислового робота
Номер патенту: 103226
Опубліковано: 10.12.2015
Автори: Смірнов Антон Сергійович, Павленко Іван Іванович, Годунко Максим Олегович

Формула / Реферат
Захоплювальний пристрій промислового робота, який складається з пневмоциліндра, в якому розміщені поршень зі штоком, та призматичних затискних важелів, який відрізняється тим, що його устатковано рухомими затискними елементами та повзуном зі шкалою вибору кута затискних призм.
Текст
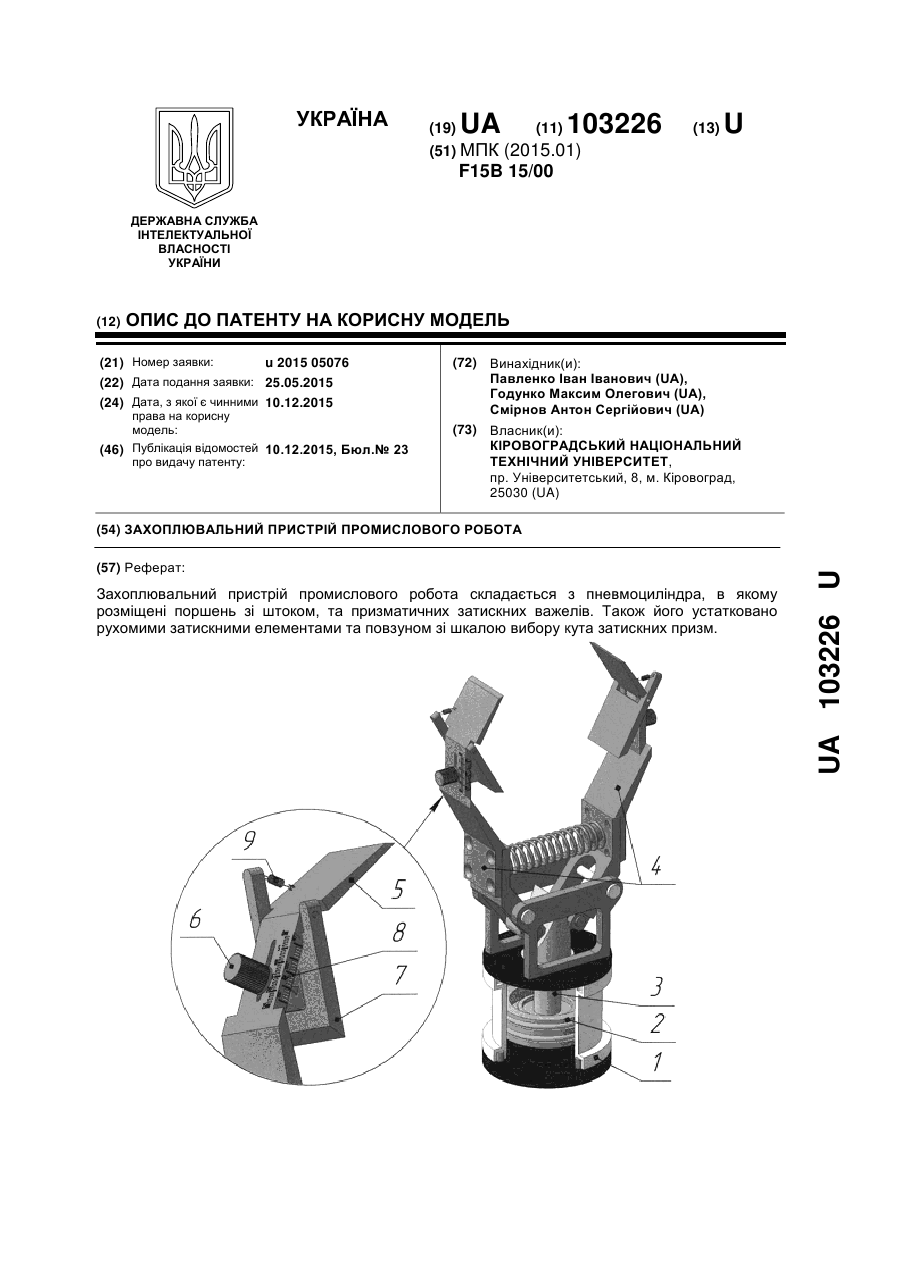
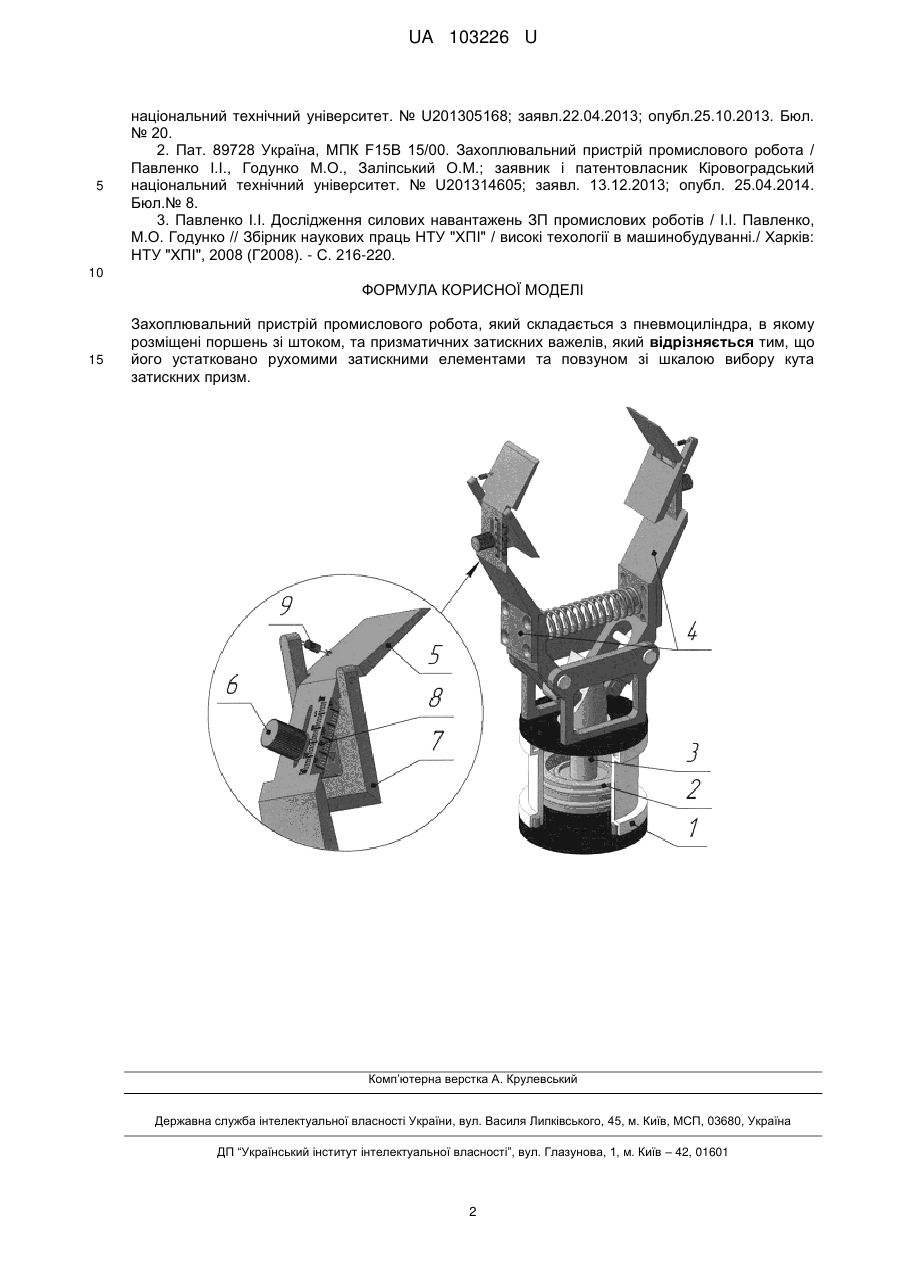
Реферат: Захоплювальний пристрій промислового робота складається з пневмоциліндра, в якому розміщені поршень зі штоком, та призматичних затискних важелів. Також його устатковано рухомими затискними елементами та повзуном зі шкалою вибору кута затискних призм. UA 103226 U (54) ЗАХОПЛЮВАЛЬНИЙ ПРИСТРІЙ ПРОМИСЛОВОГО РОБОТА UA 103226 U UA 103226 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до робототехніки, і може бути використана при проектуванні або модернізації промислових роботів, які використовуються при проведенні завантажувально-розвантажувальних робіт металорізальних верстатів, що входять до складу робототехнічних комплексів. Найближчі аналоги захоплювальних пристроїв даного типу представлені в джерелах [1] та [2], які складаються з пневмоциліндру, в якому розміщені поршень зі штоком, та затискних важелів із затискними елементами. В першому випадку основу механізму вибору кута затискних призм є гвинт, який сприймає силові навантаження в точці. Це може привести до поломки системи при ротації захоплювального пристрою та інших рухах в просторі. Другий варіант характеризується використанням ролика зі зміщеним центром. Силові навантаження сприймаються по лінії, що дає відповідні переваги, але досить неточною є шкала вибору кута затискних призм та фіксація самого ролика. Вказані захоплювальні пристрої вирішують задачу вибору кута затискних призм, але мають ряд недоліків, описаних вище, і тому не рекомендуються до застосування. В основу корисної поставлена задача підвищення точності і продуктивності роботизованого комплексу в цілому. Поставлена задача вирішується тим, що захоплювальний пристрій устатковано рухомими затискними елементами та повзуном зі шкалою вибору кута затискних призм. На кресленні представлено загальний вид конструкції захоплювального пристрою робота, що пропонується. Захоплювальний пристрій складається з пневмоциліндру 1, в якому розміщено поршень 2 зі штоком 3, затискних важелів 4 із затискними елементами 5, а також суміщених із затискними важелями 4 рухомих затискних елементів 7. На затискних важелях 4 виконано шкалу 8 для вибору кута затискних призм, вздовж якої рухається повзун 6. Повзун 6 виконано клиновидної форми з однієї сторони і прижима з різзю з іншої. Додатковою конструктивною складовою для повернення у вихідне положення рухомих затискних елементів 7 є пружина розтиску 9. Розроблений захоплювальний пристрій працює наступним чином: подається в пневмоциліндр 1 стиснуте повітря. Переміщуючись, поршень 2 та шток 3 повертають затискні важелі 4 із затискними елементами 5 навколо вісі їх опор. Рухомі затискні елементи 7 також розташовані на затискних важелях, тому при повороті останніх здійснюють аналогічний рух відносно тієї ж вісі. Затискні елементи 7 стискають деталь і виконується заданий цикл роботи. Особливістю роботи рухомих затискних елементів 7 є те, що вони мають можливість здійснювати поворот навколо власної вісі їх приєднання на важелях 4. Отже, додаткові можливості роботи самого захоплювального пристрою полягають в тому, що перед його використанням можливо вибрати кут затискних призм, які формуються затискними елементами 5 та 7. Відповідно до рекомендацій в літературних джерелах [3], відпустивши прижим на повзуні 6, перемістити його на поділку, яка відповідає обраному куту затискних призм. Для зручності налагодження захоплювального пристрою, шкала 8 виконана в двох розмірностях. Це міліметри, які відповідають довжині переміщення повзуна 6, та градуси, які відповідають куту повороту рухомого затискного елементу 7. Досягнута симетричність та необхідний кут затискних призм захоплювального пристрою при затиску деталей різних діаметрів сприяє запобіганню виривання деталі при її маніпулюванні, раціонально розподіляє навантаження на затискні елементи та важелі захоплювального пристрою, а також зменшує величину необхідних сил затиску, що призводить до зменшення масо-габаритних характеристик всього захоплювального пристрою. А відсутність додаткових регулюючих елементів дає можливість встановлювати значно більшу кількість деталей в касету та збільшити час роботи верстатного комплекту без дозавантаження. Однією з головних переваг даної конструкції є те, що похибка зміщення вісі затиснутих деталей в захоплювальному пристрої до механічної обробки і після, або ж при затисканні деталей з великим інтервалом діаметральних розмірів, зводиться до мінімального значення. І на відміну від звичайного захватного пристрою, дана похибка зменшується приблизно в 3,5 рази [3]. Запропоновані підналагоджувальні елементи дають можливість краще стримувати діючі зусилля, не пошкоджуючи конструкцію захоплю вального пристрою, краще фіксувати вибрані конструктивні параметри та більш зручно проводити підналадку за рахунок подвійної шкали. Компактна конструкція даного захватного пристрою з підвищеними точностними і силовими характеристиками придатна для здійснення завантажувально-розвантажувальних робіт при обслуговуванні металообробного обладнання у складі роботизованих комплексів. Використані джерела: 1. Пат. 84583 Україна, МПК С23С 4/00. Захоплювальний пристрій промислового робота / Павленко І.І., Годунко М.О., Кіріченко І.Д.; заявник і патентовласник Кіровоградський 1 UA 103226 U 5 національний технічний університет. № U201305168; заявл.22.04.2013; опубл.25.10.2013. Бюл. № 20. 2. Пат. 89728 Україна, МПК F15B 15/00. Захоплювальний пристрій промислового робота / Павленко І.І., Годунко М.О., Заліпський О.М.; заявник і патентовласник Кіровоградський національний технічний університет. № U201314605; заявл. 13.12.2013; опубл. 25.04.2014. Бюл.№ 8. 3. Павленко І.І. Дослідження силових навантажень ЗП промислових роботів / І.І. Павленко, М.О. Годунко // Збірник наукових праць НТУ "ХПІ" / високі техології в машинобудуванні./ Харків: НТУ "ХПІ", 2008 (Г2008). - С. 216-220. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Захоплювальний пристрій промислового робота, який складається з пневмоциліндра, в якому розміщені поршень зі штоком, та призматичних затискних важелів, який відрізняється тим, що його устатковано рухомими затискними елементами та повзуном зі шкалою вибору кута затискних призм. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюIndustrial gripping device
Автори англійськоюPavlenko Ivan Ivanovych, Godunko Maksym Olegovych, Smirnov Anton Serhiyovych
Назва патенту російськоюЗахватывающее устройство промышленного робота
Автори російськоюПавленко Иван Иванович, Годунко Максим Олегович, Смирнов Антон Сергеевич
МПК / Мітки
МПК: F15B 15/00
Мітки: захоплювальний, робота, промислового, пристрій
Код посилання
<a href="https://ua.patents.su/4-103226-zakhoplyuvalnijj-pristrijj-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Захоплювальний пристрій промислового робота</a>
Захоплювальний пристрій промислового робота
Номер патенту: 66207
Опубліковано: 26.12.2011
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B25J 15/00
Мітки: пристрій, захоплювальний, робота, промислового
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоприводу, корпусу та приєднаних до останнього затискних важелів з призматичними затискними елементами, який відрізняється тим, що він містить два рухомі фіксатори та чотири пази для зміни відстані між опорами затискних важелів.
Захоплювальний пристрій промислового робота
Номер патенту: 84583
Опубліковано: 25.10.2013
Автори: Кіріченко Іван Дмитрович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: C23C 4/00
Мітки: промислового, робота, пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій промислового робота, який містить пневмоциліндр, в якому розміщені поршень зі штоком, та приєднані до штока затискні важелі із затискними елементами, який відрізняється тим, що його встатковано рухомими затискними елементами, регулюючим гвинтом та шкалою для вибору кута їх приєднання.
Захоплювальний пристрій промислового робота

Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B65H 9/10
Мітки: захоплювальний, робота, промислового, пристрій
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Захоплювальний пристрій промислового робота

Номер патенту: 71952
Опубліковано: 25.07.2012
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B25J 15/00
Мітки: промислового, робота, пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій промислового робота, який складається з пневмоприводу, корпусу та призматичних затискних важелів, який відрізняється тим, що важелі з'єднані пружиною розтиску, яка встановлена між короткими їх частинами відносно опор.
Захватний пристрій промислового робота
Номер патенту: 89728
Опубліковано: 25.04.2014
Автори: Заліпський Олег Миколайович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: F15B 15/00
Мітки: захватний, робота, пристрій, промислового
Формула / Реферат:
Захватний пристрій промислового робота, що містить пневмоциліндр, в якому розміщені поршень зі штоком та приєднані до штока затискні важелі із затискними елементами, який відрізняється тим, що оснащений рухомими затискними елементами та ексцентриком для вибору кута їх приєднання.
Попередній патент: Спосіб переробки осадів стічних вод тривалого зберігання на добриво
Наступний патент: Пристрій для пророщування солоду
Випадковий патент: Спосіб відтворення електричного опору