Захоплювальний пристрій промислового робота
Номер патенту: 71952
Опубліковано: 25.07.2012
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович

Формула / Реферат
Захоплювальний пристрій промислового робота, який складається з пневмоприводу, корпусу та призматичних затискних важелів, який відрізняється тим, що важелі з'єднані пружиною розтиску, яка встановлена між короткими їх частинами відносно опор.
Текст
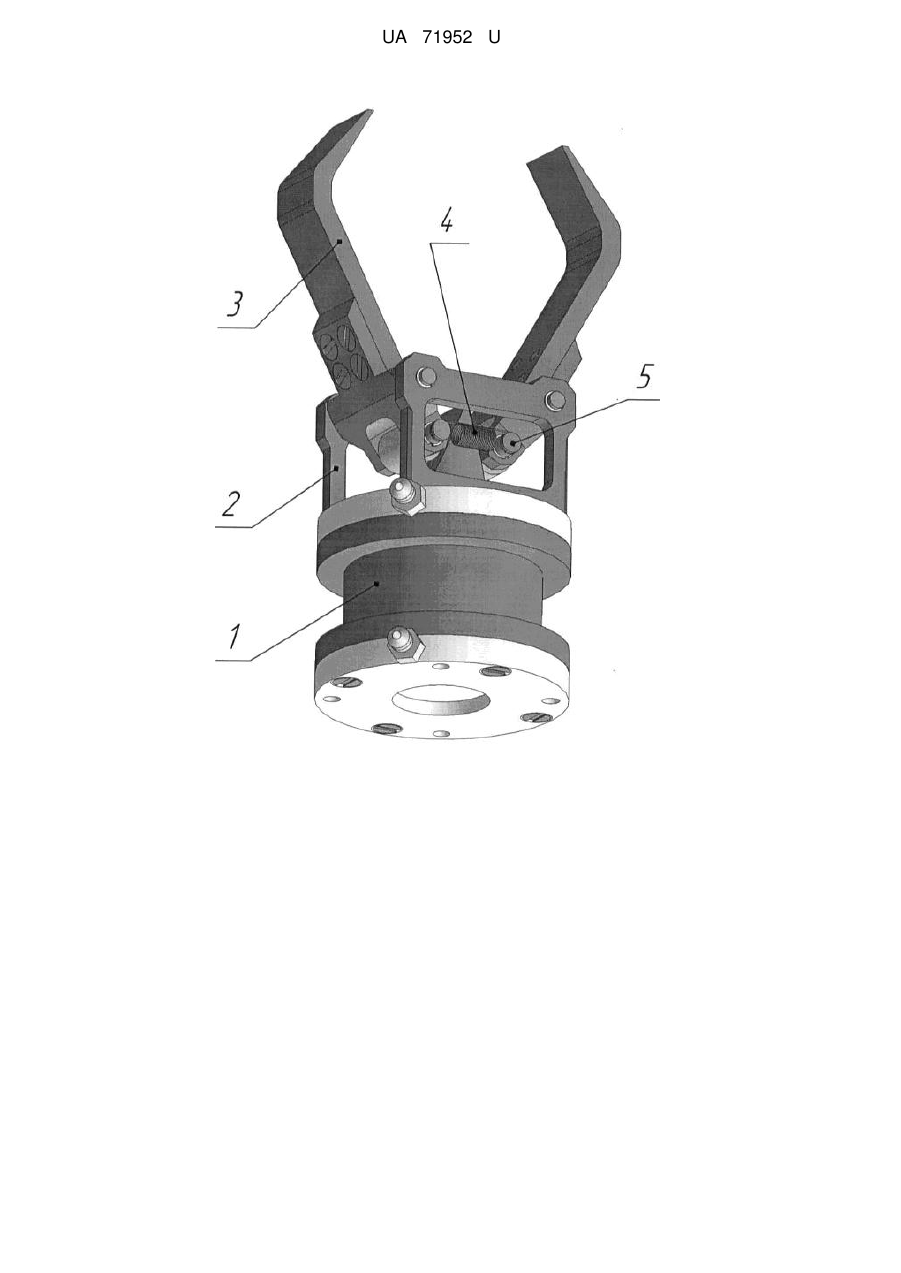
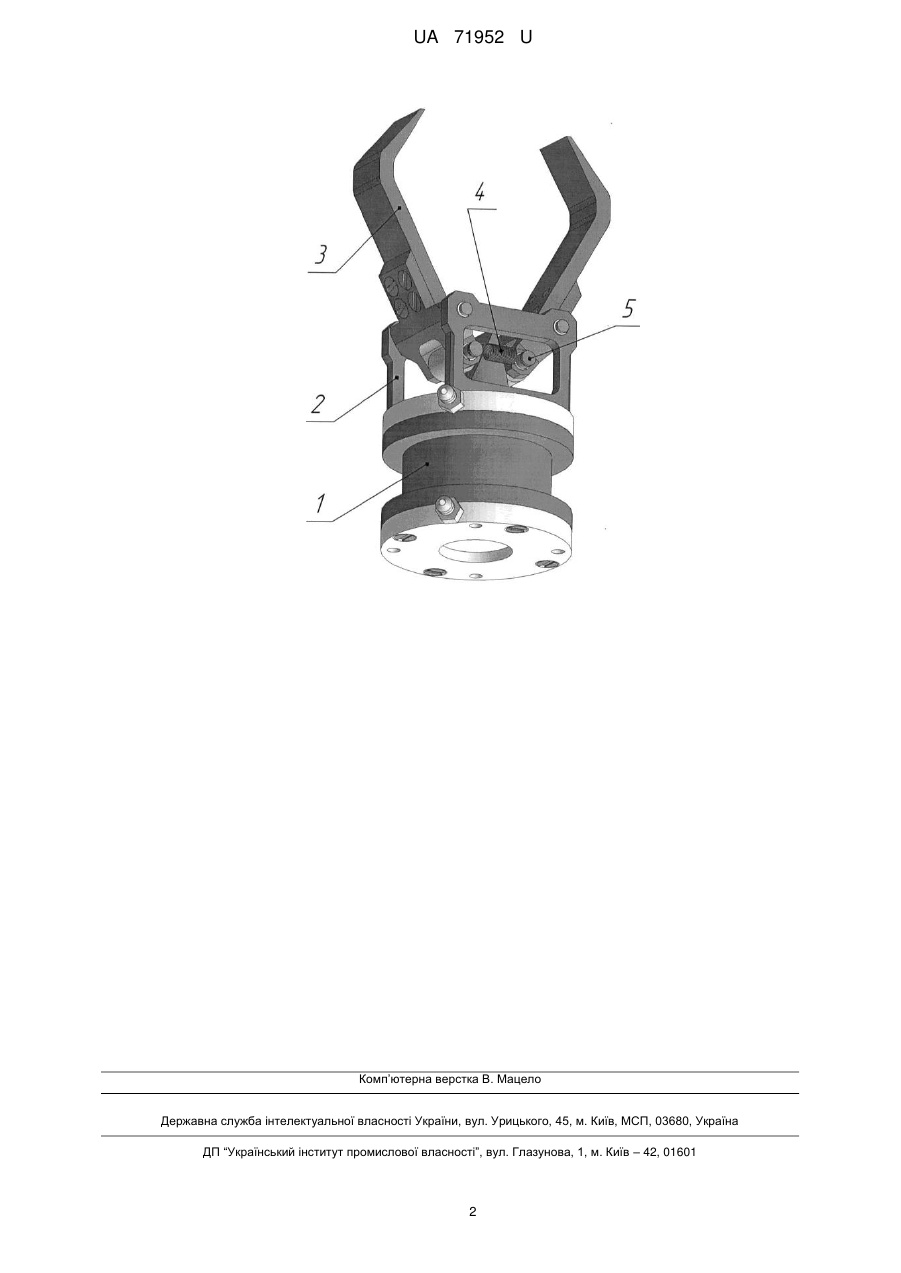
Реферат: UA 71952 U UA 71952 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до галузі машинобудування, а саме до робототехніки, і може бути використана при проектуванні або модернізації промислових роботів, які використовуються при проведенні завантажувально-розвантажувальних робіт металорізальних верстатів, що входять до складу робототехнічних комплексів. Найбільш близькими аналогом є конструкції захоплювальних пристроїв даного типу, описані в джерелах [1 - див. стор. 143, рис. 4.4 та рис. 4.5], які складаються з пневмоприводу, корпусу та приєднаних до останнього призматичних затискних важелів. Вказані захоплювальні пристрої знаходять широке використання, але їх застосування веде до обмеження функціональних можливостей даного типу конструкцій, а саме до збільшення масогабаритних характеристик, а відповідно і до інерційності конструкції; збільшення ходу поршня пневмоприводу, а відповідно до погіршення показників швидкості спрацювання; зменшення точності, яка веде до збільшення похибки зміщення осі деталі при її затиску. Ці всі недоліки пов'язані з тим, що в даних конструкціях використовується пружина, яка працює на стиск, і встановлена вона між довгими частинами важелів відносно опор. Такий варіант встановлення пружини дає збільшення довжини затискних важелів, яке негативно впливає на функціональні характеристики захоплювальних пристроїв, які є кінцевою ланкою кінематичного ланцюга промислового робота. Тому, найбільш негативно впливає розглянуте традиційне виконання конструкцій захоплювальних пристроїв на масо-габаритні показники та інерційність даних конструкцій, особливо при виконанні робочих рухів з маніпульованою деталлю. В основу корисної моделі поставлена задача підвищення точності захоплювального пристрою та промислового робота, а також зменшення інерційності конструкції. Поставлена задача вирішується завдяки тому, що важелі з'єднані пружиною розтиску, яка встановлена між короткими їх частинами відносно опор. На кресленні представлено загальний вид конструкції захоплювального пристрою робота, що пропонується. Захоплювальний пристрій складається з пневмоприводу 1, корпусу 2, приєднаних до останнього призматичних затискних важелів 3 та пружини розтиску 4, яка встановлена між короткими їх частинами відносно опор 5. Розроблений захоплювальний пристрій працює наступним чином. Для затиску деталі захватним пристроєм подається стиснуте повітря у пневмопривід 1 захоплювального пристрою і відбувається затиск призматичних затискних важелів 3, які закріплені в корпусі 2. При цьому пружина розтиску 4, яка встановлена між короткими частинами призматичних затискних важелів 3, намагається звести їх до осі симетрії захоплювального пристрою. Для розтиску деталі знову спрацьовує (у зворотному напрямку) пневмопривід 1 захоплювального пристрою і відбувається розтиск призматичних затискних важелів 3. При цьому пружина розтиску 4, повертає у вихідне положення призматичні затискні важелі 3. Головною перевагою даної конструкції є зменшення її масогабаритних характеристик, а відповідно інерційності конструкції, за рахунок зменшення довжини важелів; збільшення швидкості спрацювання захоплювального пристрою; покращення точності захоплювального пристрою та промислового робота в цілому, за рахунок зменшення похибки зміщення осі деталі при її затиску. Компактна конструкція даного захоплювального пристрою з покращеними функціональними характеристиками придатна для здійснення завантажувально-розвантажувальних робіт при обслуговуванні металообробного обладнання у складі роботизованих комплексів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Захоплювальний пристрій промислового робота, який складається з пневмоприводу, корпусу та призматичних затискних важелів, який відрізняється тим, що важелі з'єднані пружиною розтиску, яка встановлена між короткими їх частинами відносно опор. 1 UA 71952 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device of an industrial robot
Автори англійськоюPavlenko Ivan Ivanovych, Hodunko Maksym Olehovych, Mazhara Vitalii Anatoliiovych
Назва патенту російськоюЗахватное устройство промышленного робота
Автори російськоюПавленко Иван Иванович, Годунко Максим Олегович, Мажара Виталий Анатольевич
МПК / Мітки
МПК: B25J 15/00
Мітки: пристрій, робота, промислового, захоплювальний
Код посилання
<a href="https://ua.patents.su/4-71952-zakhoplyuvalnijj-pristrijj-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Захоплювальний пристрій промислового робота</a>
Захоплювальний пристрій промислового робота
Номер патенту: 66207
Опубліковано: 26.12.2011
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B25J 15/00
Мітки: промислового, пристрій, робота, захоплювальний
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоприводу, корпусу та приєднаних до останнього затискних важелів з призматичними затискними елементами, який відрізняється тим, що він містить два рухомі фіксатори та чотири пази для зміни відстані між опорами затискних важелів.
Захоплювальний пристрій промислового робота

Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B65H 9/10
Мітки: захоплювальний, промислового, пристрій, робота
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16S 5/00
Мітки: пристрій, робота, промислового, двозахватний
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович, Годунко Максим Олегович
МПК: B23B 15/00, B23Q 7/04
Мітки: захватний, робота, пристрій, промислового
Формула / Реферат:
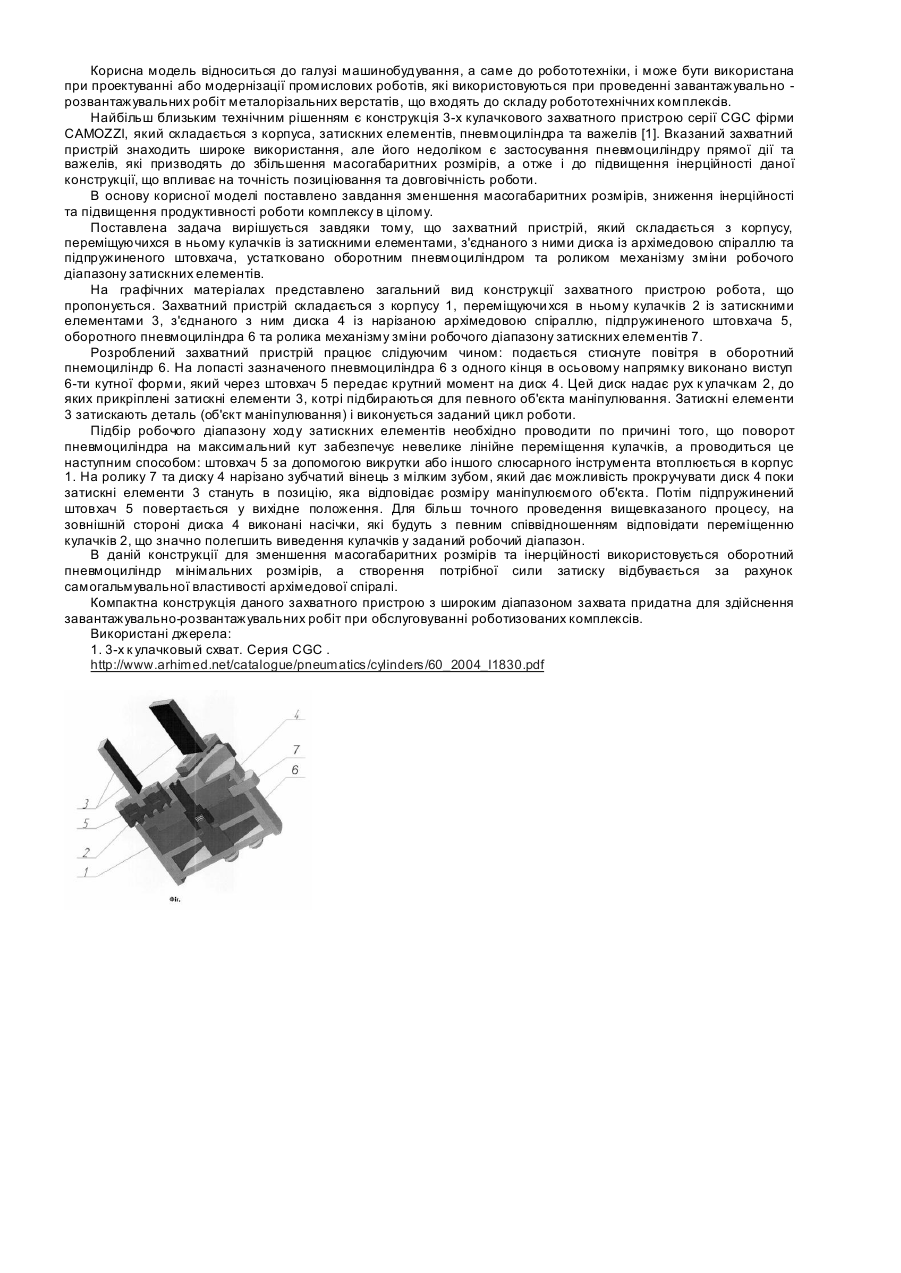
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B23Q 3/06, B25J 18/00
Мітки: робота, промислового, пристрій, двозахватний
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Попередній патент: Спосіб виділення контуру слабоконтрастних розмитих зображень
Наступний патент: Установка бактерицидного знезараження питної води
Випадковий патент: Очисник головок коренеплодів від залишків гички