Захоплювальний пристрій промислового робота
Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович

Формула / Реферат
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Текст
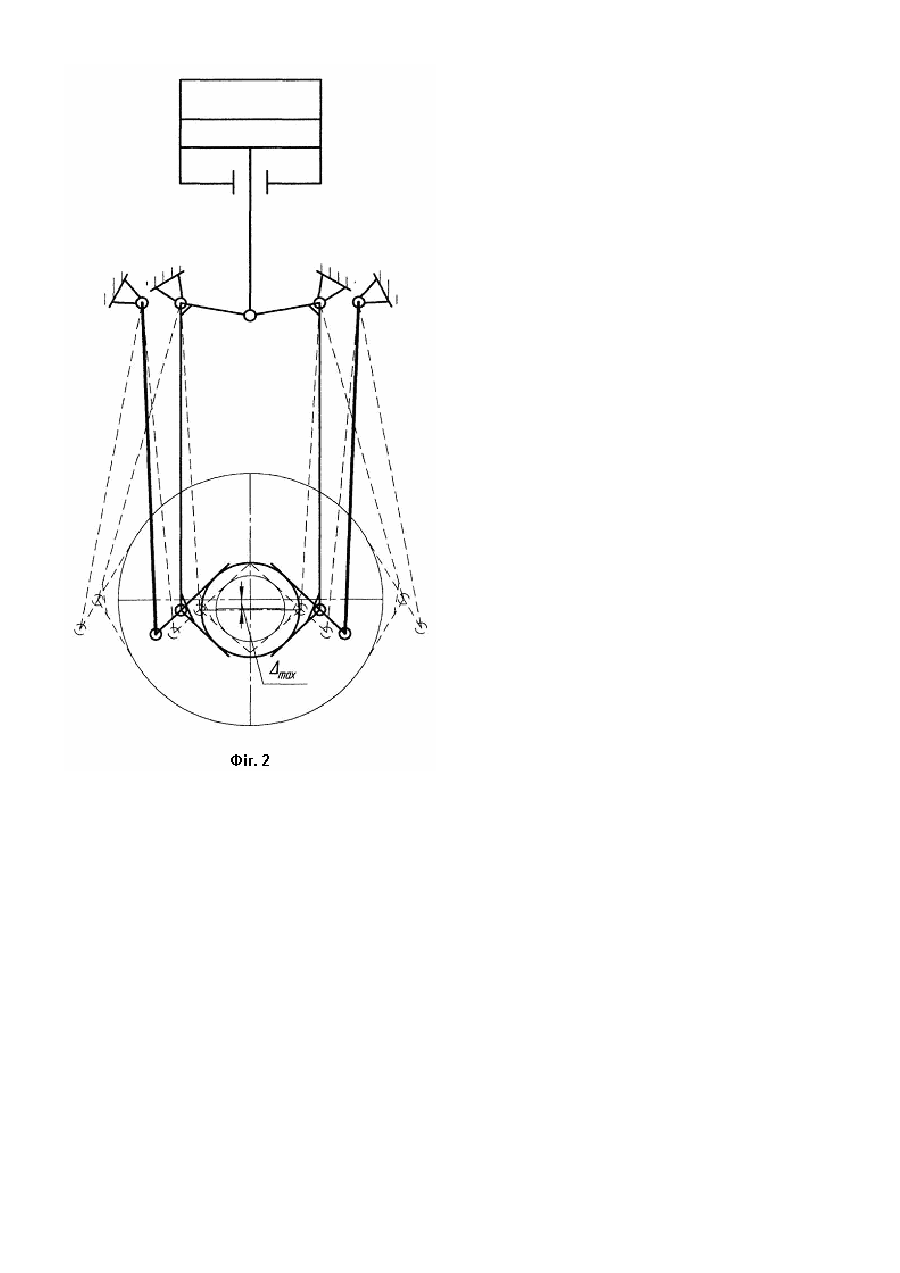
Корисна модель належить до машинобудування, а саме до робототехніки, і може бути використана при проектуванні або модернізації промислових роботів, які використовуються при проведенні завантажувально розвантажувальних робіт металорізальних верстатів, що входять до складу робототехнічних комплексів. Найбільш близькими технічними рішеннями є кінематичні схеми захоплювальних пристроїв даного типу, описані в джерелі [1], які складаються з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока важелів з затискними елементами. Вказані захоплювальні пристрої знаходять широке використання, але їх застосування веде до похибки центрування при затиску деталей різних діаметрів. Також конструкції такого типу захоплювальних пристроїв потребують підвищення мінімально потрібного зусилля затиску при збільшенні діаметра та маси об’єкта маніпулювання, оскільки точки прикладання сил затиску розташовуються в малодоцільних місцях. В основу корисної моделі поставлено завдання підвищення точності і продуктивності роботи комплексу в цілому. Поставлена задача вирішується завдяки тому, що два призматичні затискні елементи виконано рухомими. На Фіг.1 представлено загальний вид конструкції захоплювального пристрою робота, що пропонується. На Фіг.2 представлено в кінематичному вигляді захоплювальний пристрій промислового робота, де показана максимальна похибка центрування. Захоплювальний пристрій складається з пневмоциліндра 1, в якому розміщений поршень 2 зі штоком 3, та приєднаних до штока 3 затискних важелів 4 з призматичними затискними елементами 5, два із яких 6 виконано рухомими. Розроблений захоплювальний пристрій працює наступним чином: подається в пневмоциліндр 1 стиснуте повітря. Переміщуючись, поршень 2 та шток 3 рухають затискні важелі 4 з призматичними затискними елементами 5 в кутовому напрямку. Так як призматичні затискні елементи 5 жорстко з’єднані із затискними важелями 4, то вони також змінюють кут відносно уявної площини, яка проходить через вісь деталі та „точку’’ закріплення призматичних затискних елементів 6, що виконані рухомими. Рухомі призматичні затискні елементи 6, за допомогою затискних важелів 4, здійснюють симетричний поворот і утворюють кут, рівний куту зміщення призматичних затискних елементів 5. Затискні елементи стискають деталь і виконують заданий цикл роботи. Довжина важелів 4, які змінюють кут „призми’’, можна визначити за допомогою простих геометричних побудов, а саме радіусами перетинаючихся кіл, які проводяться з точок з’єднання рухомих затискних елементів 6 з даними важелями. Досягнута симетричність захоплювальних елементів при затисканні деталей різних діаметрів сприяє запобіганню виривання деталі при її маніпулюванні, а також раціонально розподіляє навантаження на затискні елементи та важелі захоплювального пристрою. Головною перевагою даної конструкції є те, що похибка центрування затиснутої деталі до механічної обробки і після (що веде до зміни діаметра), або ж при затисканні деталей з великим інтервалом діаметральних розмірів, зводиться до мінімального значення. І на відміну від звичайного захоплювального пристрою, похибка центрування (Δmax) зменшується приблизно в 3,5 разів (Фіг.2). Компактна конструкція даного захоплювального пристрою з підвищеними точнісними і силовими характеристиками придатна для здійснення завантажувально-розвантажувальних робіт при обслуговуванні металообробного обладнання у складі роботизованих комплексів. Використані джерела: 1. Челпанов И.Б., Колпашников С.Н. Схваты промышленных роботов. -Л.: Машиностроение. Ленингр. отдние, 1989. - 287с: ил.
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device of industrial robot
Автори англійськоюPavlenko Ivan Ivanovych, Hodunko Maksym Olehovych, Mazhara Vitalii Anatoliiovych
Назва патенту російськоюЗахватное устройство промышленного робота
Автори російськоюПавленко Иван Иванович, Годунко Максим Олегович, Мажара Виталий Анатольевич
МПК / Мітки
МПК: B65H 9/10
Мітки: робота, захоплювальний, промислового, пристрій
Код посилання
<a href="https://ua.patents.su/2-32260-zakhoplyuvalnijj-pristrijj-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Захоплювальний пристрій промислового робота</a>
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B23Q 7/04, B23B 15/00
Мітки: робота, пристрій, захватний, промислового
Формула / Реферат:
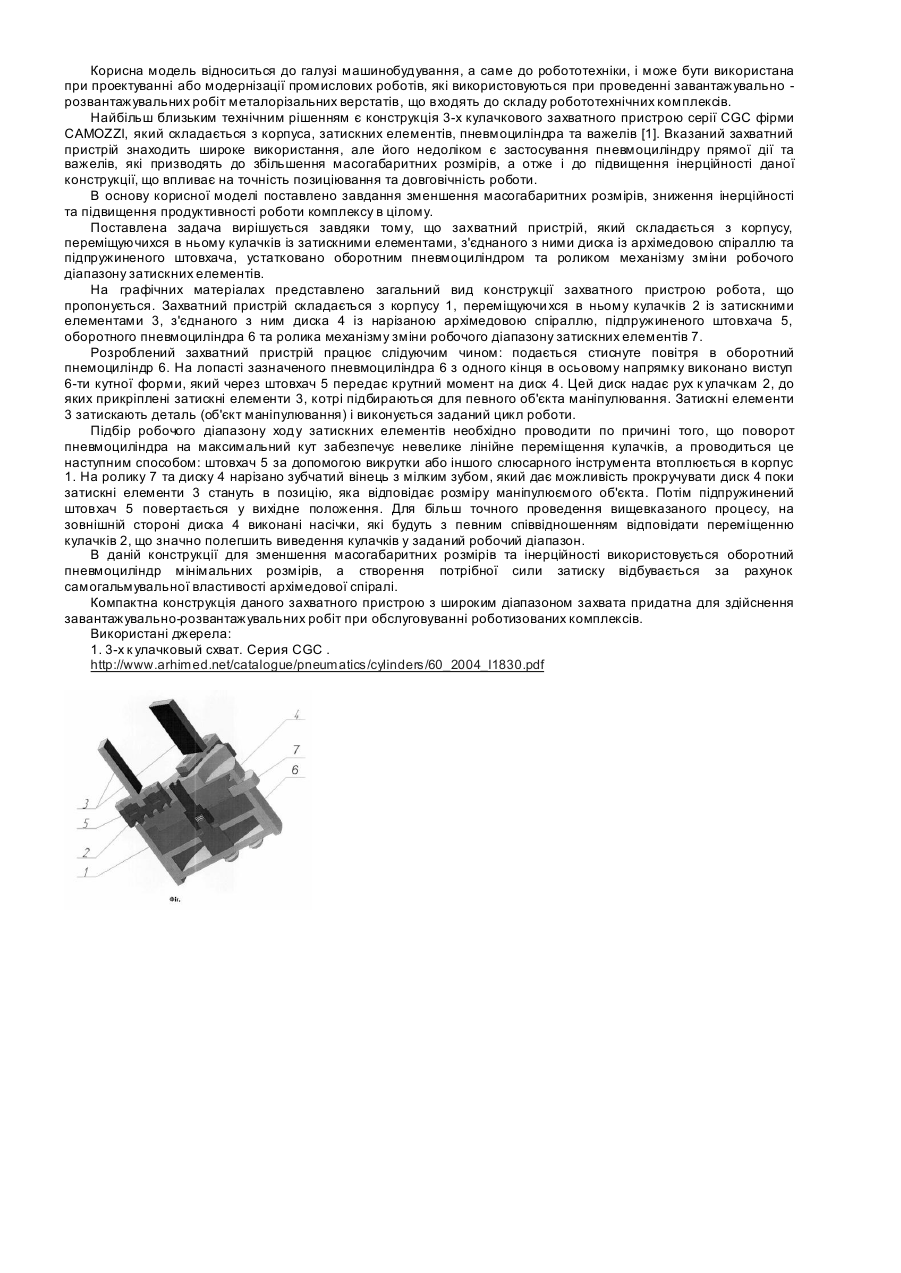
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16S 5/00
Мітки: двозахватний, промислового, робота, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович, Годунко Максим Олегович
МПК: B25J 18/00, B23Q 3/06
Мітки: робота, двозахватний, промислового, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: B65H 09/00
Мітки: пристрій, промислового, двозахоплювальний, робота
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Багатофункціональний кистьовий вузол промислового робота
Номер патенту: 24706
Опубліковано: 10.07.2007
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Шишкін Олександр Сергійович
МПК: B25J 15/00
Мітки: вузол, промислового, кистьовий, робота, багатофункціональний
Формула / Реферат:
Багатофункціональний кистьовий пристрій промислового робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично з'єднаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою...
Наступний патент: Пристрій для завантаження сипких матеріалів у клапанні мішки
Випадковий патент: Пристрій для розбивки горизонтальних кругових кривих