Пристрій для безконтактної маніпуляції
Номер патенту: 104480
Опубліковано: 10.02.2016
Автори: Риндюк Олександр Володимирович, Калашнікова Лариса Євгенівна, Дрозденко Олександр Іванович
Формула / Реферат
Пристрій для безконтактної маніпуляції, що містить розташовану на п'єзоелектричній підкладці робочу камеру з двома вхідними та двома вихідними патрубками в центрі двох пар ортогонально розміщених зустрічно-штирьових перетворювачів, який відрізняється тим, що відстані між центрами штирів зустрічно-штирьових перетворювачів однакові і дорівнюють половині довжини поверхневої акустичної хвилі в матеріалі підкладки.
Текст
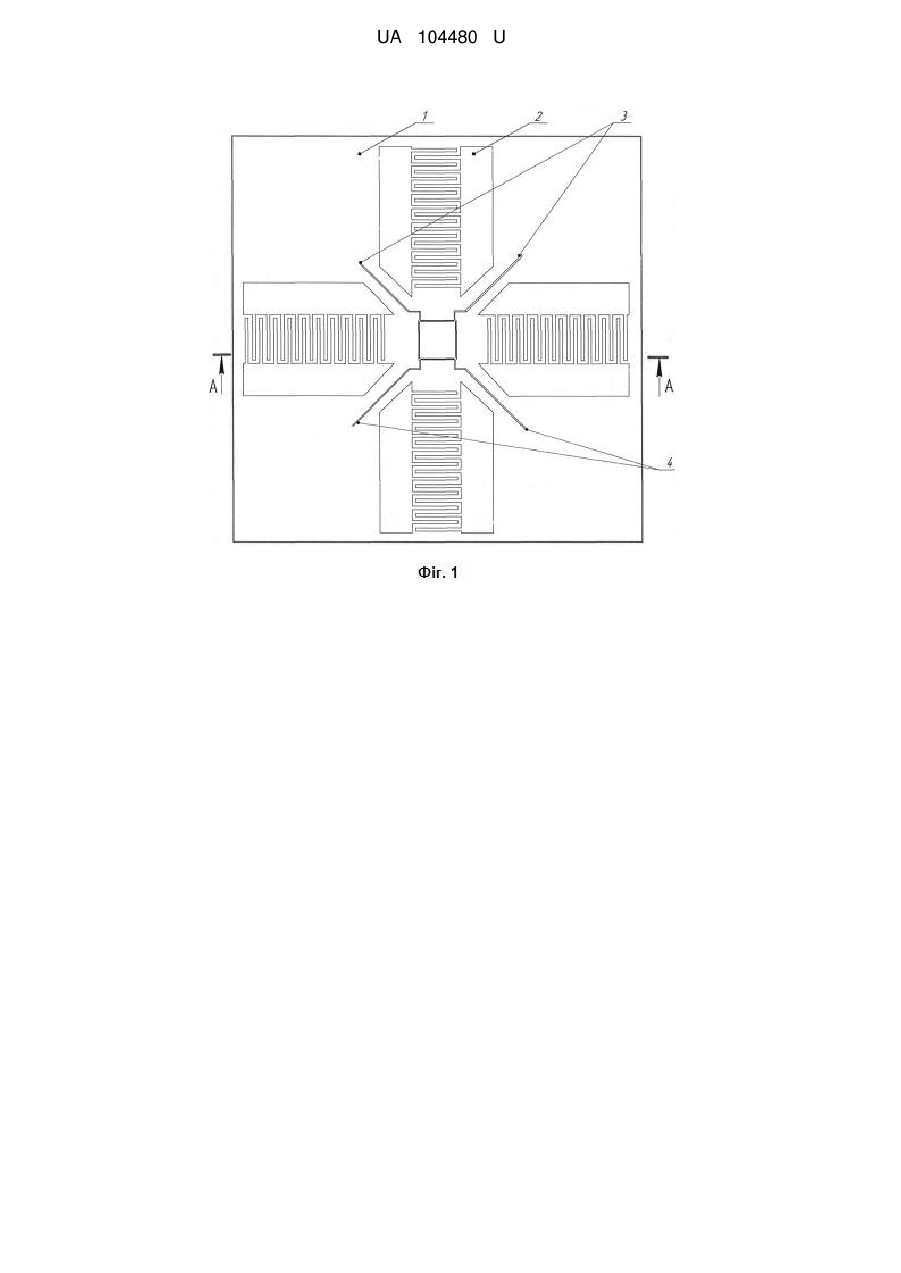
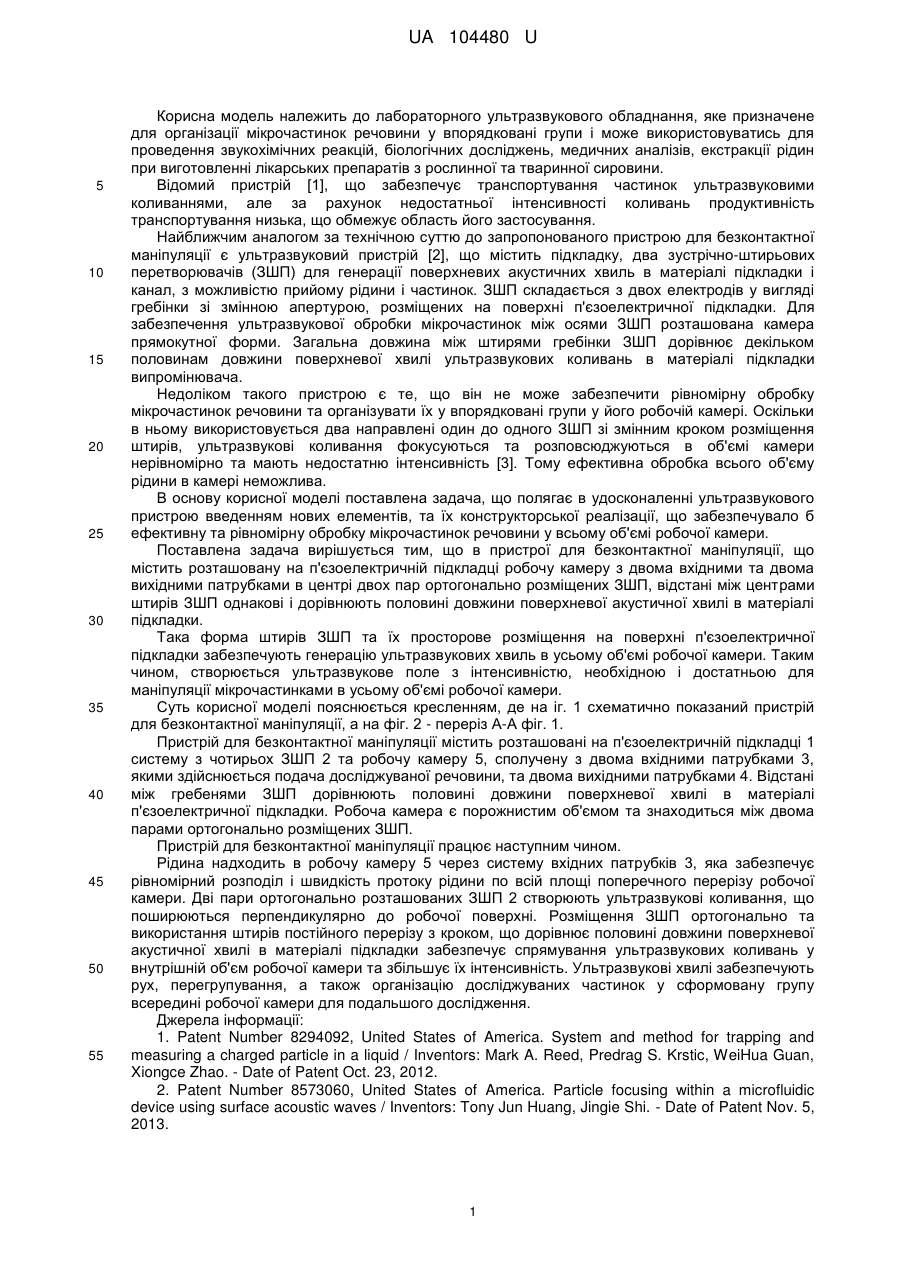
Реферат: Пристрій для безконтактної маніпуляції, що містить розташовану на п'єзоелектричній підкладці робочу камеру з двома вхідними та двома вихідними патрубками в центрі двох пар ортогонально розміщених зустрічно-штирьових перетворювачів. Відстані між центрами штирів зустрічно-штирьових перетворювачів однакові і дорівнюють половині довжини поверхневої акустичної хвилі в матеріалі підкладки. UA 104480 U (12) UA 104480 U UA 104480 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до лабораторного ультразвукового обладнання, яке призначене для організації мікрочастинок речовини у впорядковані групи і може використовуватись для проведення звукохімічних реакцій, біологічних досліджень, медичних аналізів, екстракції рідин при виготовленні лікарських препаратів з рослинної та тваринної сировини. Відомий пристрій [1], що забезпечує транспортування частинок ультразвуковими коливаннями, але за рахунок недостатньої інтенсивності коливань продуктивність транспортування низька, що обмежує область його застосування. Найближчим аналогом за технічною суттю до запропонованого пристрою для безконтактної маніпуляції є ультразвуковий пристрій [2], що містить підкладку, два зустрічно-штирьових перетворювачів (ЗШП) для генерації поверхневих акустичних хвиль в матеріалі підкладки і канал, з можливістю прийому рідини і частинок. ЗШП складається з двох електродів у вигляді гребінки зі змінною апертурою, розміщених на поверхні п'єзоелектричної підкладки. Для забезпечення ультразвукової обробки мікрочастинок між осями ЗШП розташована камера прямокутної форми. Загальна довжина між штирями гребінки ЗШП дорівнює декільком половинам довжини поверхневої хвилі ультразвукових коливань в матеріалі підкладки випромінювача. Недоліком такого пристрою є те, що він не може забезпечити рівномірну обробку мікрочастинок речовини та організувати їх у впорядковані групи у його робочій камері. Оскільки в ньому використовується два направлені один до одного ЗШП зі змінним кроком розміщення штирів, ультразвукові коливання фокусуються та розповсюджуються в об'ємі камери нерівномірно та мають недостатню інтенсивність [3]. Тому ефективна обробка всього об'єму рідини в камері неможлива. В основу корисної моделі поставлена задача, що полягає в удосконаленні ультразвукового пристрою введенням нових елементів, та їх конструкторської реалізації, що забезпечувало б ефективну та рівномірну обробку мікрочастинок речовини у всьому об'ємі робочої камери. Поставлена задача вирішується тим, що в пристрої для безконтактної маніпуляції, що містить розташовану на п'єзоелектричній підкладці робочу камеру з двома вхідними та двома вихідними патрубками в центрі двох пар ортогонально розміщених ЗШП, відстані між центрами штирів ЗШП однакові і дорівнюють половині довжини поверхневої акустичної хвилі в матеріалі підкладки. Така форма штирів ЗШП та їх просторове розміщення на поверхні п'єзоелектричної підкладки забезпечують генерацію ультразвукових хвиль в усьому об'ємі робочої камери. Таким чином, створюється ультразвукове поле з інтенсивністю, необхідною і достатньою для маніпуляції мікрочастинками в усьому об'ємі робочої камери. Суть корисної моделі пояснюється кресленням, де на іг. 1 схематично показаний пристрій для безконтактної маніпуляції, а на фіг. 2 - переріз А-А фіг. 1. Пристрій для безконтактної маніпуляції містить розташовані на п'єзоелектричній підкладці 1 систему з чотирьох ЗШП 2 та робочу камеру 5, сполучену з двома вхідними патрубками 3, якими здійснюється подача досліджуваної речовини, та двома вихідними патрубками 4. Відстані між гребенями ЗШП дорівнюють половині довжини поверхневої хвилі в матеріалі п'єзоелектричної підкладки. Робоча камера є порожнистим об'ємом та знаходиться між двома парами ортогонально розміщених ЗШП. Пристрій для безконтактної маніпуляції працює наступним чином. Рідина надходить в робочу камеру 5 через систему вхідних патрубків 3, яка забезпечує рівномірний розподіл і швидкість протоку рідини по всій площі поперечного перерізу робочої камери. Дві пари ортогонально розташованих ЗШП 2 створюють ультразвукові коливання, що поширюються перпендикулярно до робочої поверхні. Розміщення ЗШП ортогонально та використання штирів постійного перерізу з кроком, що дорівнює половині довжини поверхневої акустичної хвилі в матеріалі підкладки забезпечує спрямування ультразвукових коливань у внутрішній об'єм робочої камери та збільшує їх інтенсивність. Ультразвукові хвилі забезпечують рух, перегрупування, а також організацію досліджуваних частинок у сформовану групу всередині робочої камери для подальшого дослідження. Джерела інформації: 1. Patent Number 8294092, United States of America. System and method for trapping and measuring a charged particle in a liquid / Inventors: Mark A. Reed, Predrag S. Krstic, WeiHua Guan, Xiongce Zhao. - Date of Patent Oct. 23, 2012. 2. Patent Number 8573060, United States of America. Particle focusing within a microfluidic device using surface acoustic waves / Inventors: Tony Jun Huang, Jingie Shi. - Date of Patent Nov. 5, 2013. 1 UA 104480 U 3. Controlling Cell-Cell Interactions using Surface Acoustic Waves / G. Feng, L. Peng, J. H. Tony and etc. // Proceedings of the National Academy of Sciences of the United States of America (PNAS).-2015. - Vol. 112. - no. 1-P. 43-48. 5 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для безконтактної маніпуляції, що містить розташовану на п'єзоелектричній підкладці робочу камеру з двома вхідними та двома вихідними патрубками в центрі двох пар ортогонально розміщених зустрічно-штирьових перетворювачів, який відрізняється тим, що відстані між центрами штирів зустрічно-штирьових перетворювачів однакові і дорівнюють половині довжини поверхневої акустичної хвилі в матеріалі підкладки. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 29/02, B01J 19/00
Мітки: маніпуляції, безконтактної, пристрій
Код посилання
<a href="https://ua.patents.su/4-104480-pristrijj-dlya-bezkontaktno-manipulyaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій для безконтактної маніпуляції</a>
Спосіб безконтактної електромагнітної кардіоплетизмографії та пристрій для його реалізації
Номер патенту: 72523
Опубліковано: 15.03.2005
Автори: Піджарий Віталій Мефодійович, Личак Олег Васильович
МПК: A61B 5/02
Мітки: кардіоплетизмографії, спосіб, безконтактної, електромагнітної, реалізації, пристрій
Формула / Реферат:
1. Спосіб безконтактної електромагнітної кардіоплетизмографії, в основі якого лежить збудження антеною перед грудниною пацієнта електромагнітного поля, пронизуючого органи груднини, приймання антеною частки енергії цього поля, промодульованої основними кровоносними органами груднини, і виявлення низькочастотної огинаючої модуляції, обумовленої змінами об'єму кровоносних органів при скороченнях, який відрізняється тим, що збуджують контурною...
Пристрій для безконтактної передачі енергії на рухомий об’єкт
Номер патенту: 89282
Опубліковано: 11.01.2010
Автори: Панченко Віктор Іванович, Півняк Геннадій Григорович, Рибалко Анатолій Якович, Кольцов Ігор Борисович
Мітки: пристрій, рухомий, об`єкт, передачі, енергії, безконтактної
Формула / Реферат:
Пристрій для безконтактної передачі енергії на рухомий об'єкт, що складається з розміщеного на рухомому об'єкті енергоприймача з двома плоскими котушками, з'єднаними між собою послідовно-зустрічно, та тягової мережі з двох проводів, де перший виконаний у вигляді електропровідного прошарку з окремих елементарних проводів, рівномірно розподілених і закріплених на трубі з ізоляційного матеріалу, а другий - розміщений по осьовій лінії труби в...
Пристрій для безконтактної передачі електроенергії на електровоз

Номер патенту: 94282
Опубліковано: 26.04.2011
Автори: Півняк Геннадій Григорович, Дибрін Сергій Володимирович, Рибалко Анатолій Якович, Панченко Віктор Іванович
МПК: B60L 5/40
Мітки: електроенергії, електровоз, безконтактної, пристрій, передачі
Формула / Реферат:
1. Пристрій для безконтактної передачі енергії на електровоз у складі магнітопроводу з обмоткою в його пазах, розміщених у корпусі, який прикріплено до вальцевого візка з можливістю переміщення останнього по монорейці і оснащено шарнірною штангою для сполучення з електровозом; і проводів тягової мережі, розташованих відповідно напряму монорейки, який відрізняється тим, що в нього введено другий магнітопровід з двома поздовжніми пазами,...
Пристрій для безконтактної передачі енергії на електровоз

Номер патенту: 89280
Опубліковано: 11.01.2010
Автори: Півняк Геннадій Григорович, Панченко Віктор Іванович, Рибалко Анатолій Якович, Кольцов Ігор Борисович
Мітки: передачі, безконтактної, пристрій, електровоз, енергії
Формула / Реферат:
Пристрій для безконтактної передачі енергії на електровоз, що містить розташований на електровозі енергоприймач, виконаний у вигляді плоскої котушки, і тягову мережу з двох проводів у прямому та зворотному напрямках, які на початку мережі підключені до джерела високочастотного струму, а в кінці - з'єднані між собою, та трубу з електроізоляційного матеріалу, в якій по всій довжині мережі виконаний проріз із введеною в нього котушкою...
Пристрій для безконтактної передачі енергії на рухомий об`єкт
Номер патенту: 79861
Опубліковано: 25.07.2007
Автори: Панченко Віктор Іванович, Півняк Геннадій Григорович, Кольцов Ігор Борисович, Рибалко Анатолій Якович
Мітки: об`єкт, пристрій, рухомий, енергії, передачі, безконтактної
Формула / Реферат:
Пристрій для безконтактної передачі енергії на рухомий об'єкт, який містить розміщений на рухомому об'єкті енергоприймач у вигляді плоскої котушки та тягову мережу з двох проводів, один з яких виконаний у вигляді порожнистої труби із електропровідним шаром, а другий - у вигляді суцільного проводу, розміщеного коаксіально всередині труби, причому на початку тягової мережі проводи підключені до джерела струму, а на кінці - з'єднані між собою;...
Попередній патент: Спосіб бонітування ґрунтів
Наступний патент: Машина виборчого дроблення
Випадковий патент: Спосіб формування витків ходового гвинта