Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі

Формула / Реферат
Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з входом блока порівняння, релейного елемента, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з об'єктом управління, який відрізняється тим, що додатково введені диференціатор, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком вибірки-зберігання, вхід якого з'єднаний з виходом диференціатора, а вихід - з коректором, один вхід якого з'єднаний з виходом блока вибірки-зберігання, другий - з джерелом впливу, що задається, а вихід з'єднаний з суматором.
Текст
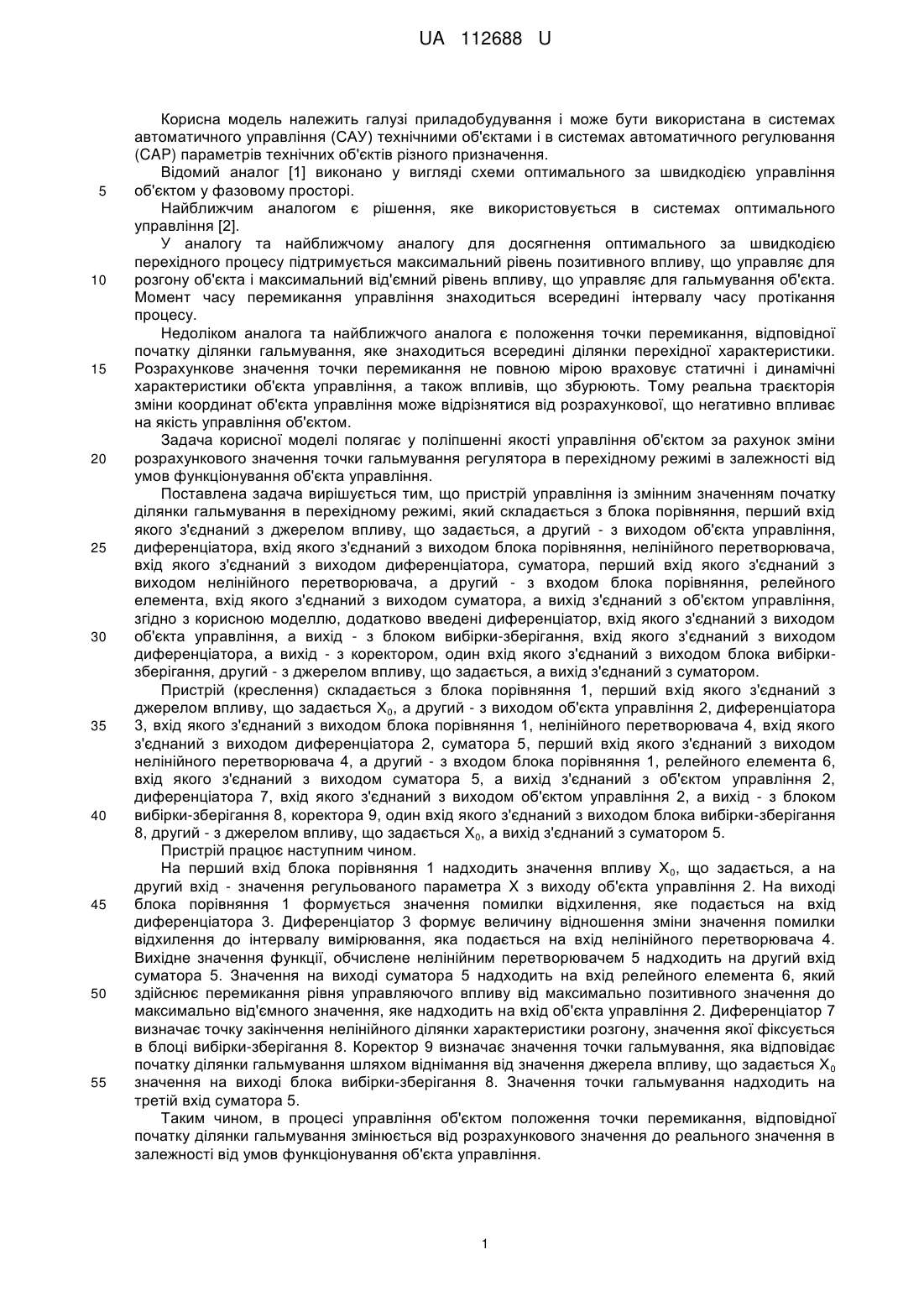
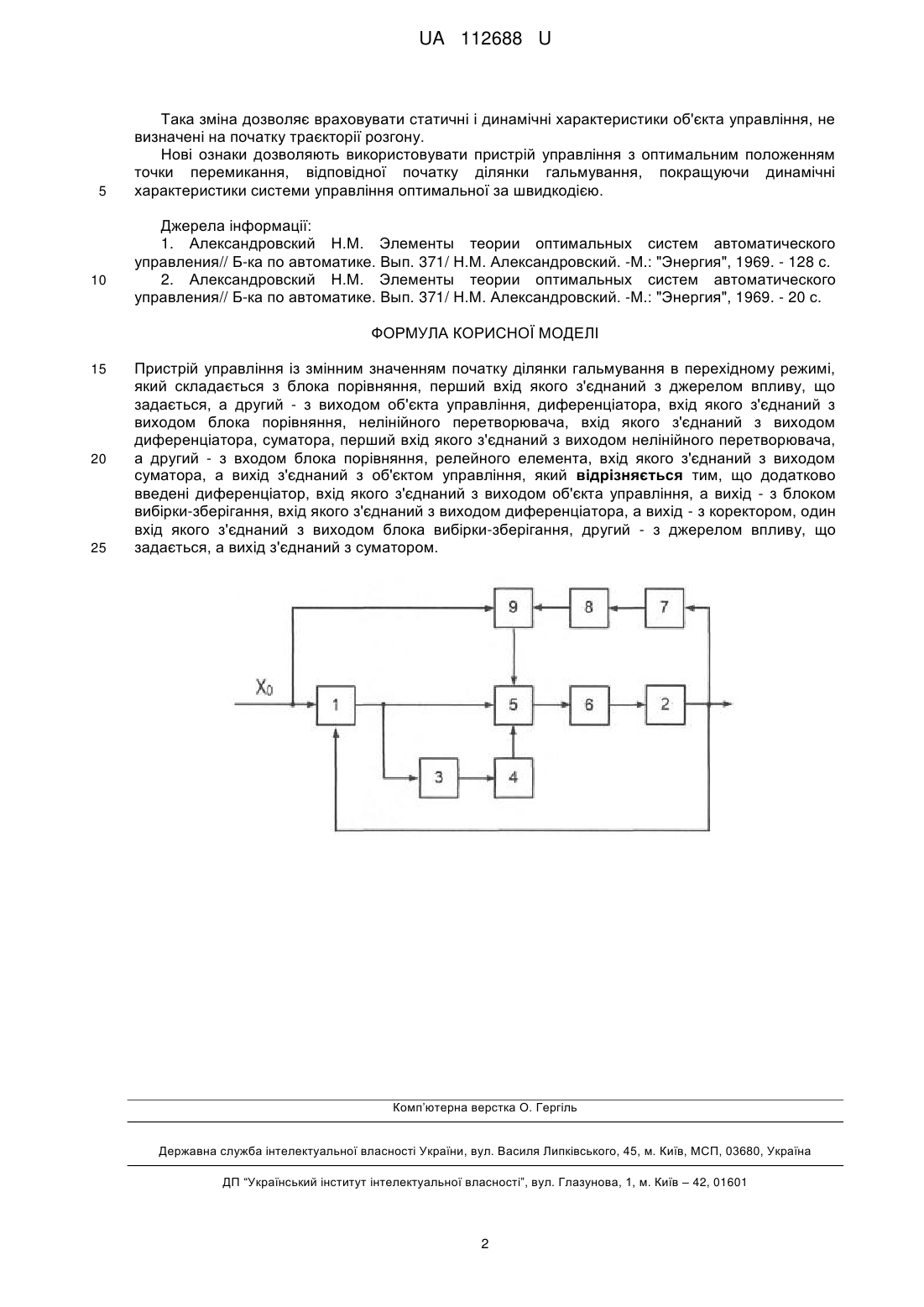
Реферат: Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі містить блок порівняння, диференціатор, блок порівняння, нелінійний перетворювач, суматор, релейний елемент. Додатково введені диференціатор, блок вибірки-зберігання, коректор. UA 112688 U (54) ПРИСТРІЙ УПРАВЛІННЯ ІЗ ЗМІННИМ ЗНАЧЕННЯМ ПОЧАТКУ ДІЛЯНКИ ГАЛЬМУВАННЯ В ПЕРЕХІДНОМУ РЕЖИМІ UA 112688 U UA 112688 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить галузі приладобудування і може бути використана в системах автоматичного управління (САУ) технічними об'єктами і в системах автоматичного регулювання (CAP) параметрів технічних об'єктів різного призначення. Відомий аналог [1] виконано у вигляді схеми оптимального за швидкодією управління об'єктом у фазовому просторі. Найближчим аналогом є рішення, яке використовується в системах оптимального управління [2]. У аналогу та найближчому аналогу для досягнення оптимального за швидкодією перехідного процесу підтримується максимальний рівень позитивного впливу, що управляє для розгону об'єкта і максимальний від'ємний рівень впливу, що управляє для гальмування об'єкта. Момент часу перемикання управління знаходиться всередині інтервалу часу протікання процесу. Недоліком аналога та найближчого аналога є положення точки перемикання, відповідної початку ділянки гальмування, яке знаходиться всередині ділянки перехідної характеристики. Розрахункове значення точки перемикання не повною мірою враховує статичні і динамічні характеристики об'єкта управління, а також впливів, що збурюють. Тому реальна траєкторія зміни координат об'єкта управління може відрізнятися від розрахункової, що негативно впливає на якість управління об'єктом. Задача корисної моделі полягає у поліпшенні якості управління об'єктом за рахунок зміни розрахункового значення точки гальмування регулятора в перехідному режимі в залежності від умов функціонування об'єкта управління. Поставлена задача вирішується тим, що пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з входом блока порівняння, релейного елемента, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з об'єктом управління, згідно з корисною моделлю, додатково введені диференціатор, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком вибірки-зберігання, вхід якого з'єднаний з виходом диференціатора, а вихід - з коректором, один вхід якого з'єднаний з виходом блока вибіркизберігання, другий - з джерелом впливу, що задається, а вихід з'єднаний з суматором. Пристрій (креслення) складається з блока порівняння 1, перший вхід якого з'єднаний з джерелом впливу, що задається Х0, а другий - з виходом об'єкта управління 2, диференціатора 3, вхід якого з'єднаний з виходом блока порівняння 1, нелінійного перетворювача 4, вхід якого з'єднаний з виходом диференціатора 2, суматора 5, перший вхід якого з'єднаний з виходом нелінійного перетворювача 4, а другий - з входом блока порівняння 1, релейного елемента 6, вхід якого з'єднаний з виходом суматора 5, а вихід з'єднаний з об'єктом управління 2, диференціатора 7, вхід якого з'єднаний з виходом об'єктом управління 2, а вихід - з блоком вибірки-зберігання 8, коректора 9, один вхід якого з'єднаний з виходом блока вибірки-зберігання 8, другий - з джерелом впливу, що задається Х0, а вихід з'єднаний з суматором 5. Пристрій працює наступним чином. На перший вхід блока порівняння 1 надходить значення впливу Х 0, що задається, а на другий вхід - значення регульованого параметра X з виходу об'єкта управління 2. На виході блока порівняння 1 формується значення помилки відхилення, яке подається на вхід диференціатора 3. Диференціатор 3 формує величину відношення зміни значення помилки відхилення до інтервалу вимірювання, яка подається на вхід нелінійного перетворювача 4. Вихідне значення функції, обчислене нелінійним перетворювачем 5 надходить на другий вхід суматора 5. Значення на виході суматора 5 надходить на вхід релейного елемента 6, який здійснює перемикання рівня управляючого впливу від максимально позитивного значення до максимально від'ємного значення, яке надходить на вхід об'єкта управління 2. Диференціатор 7 визначає точку закінчення нелінійного ділянки характеристики розгону, значення якої фіксується в блоці вибірки-зберігання 8. Коректор 9 визначає значення точки гальмування, яка відповідає початку ділянки гальмування шляхом віднімання від значення джерела впливу, що задається Х 0 значення на виході блока вибірки-зберігання 8. Значення точки гальмування надходить на третій вхід суматора 5. Таким чином, в процесі управління об'єктом положення точки перемикання, відповідної початку ділянки гальмування змінюється від розрахункового значення до реального значення в залежності від умов функціонування об'єкта управління. 1 UA 112688 U 5 10 Така зміна дозволяє враховувати статичні і динамічні характеристики об'єкта управління, не визначені на початку траєкторії розгону. Нові ознаки дозволяють використовувати пристрій управління з оптимальним положенням точки перемикання, відповідної початку ділянки гальмування, покращуючи динамічні характеристики системи управління оптимальної за швидкодією. Джерела інформації: 1. Александровский Η.Μ. Элементы теории оптимальных систем автоматического управления// Б-ка по автоматике. Вып. 371/ Η.Μ. Александровский. -М.: "Энергия", 1969. - 128 с. 2. Александровский Η.Μ. Элементы теории оптимальных систем автоматического управления// Б-ка по автоматике. Вып. 371/ Η.Μ. Александровский. -М.: "Энергия", 1969. - 20 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з входом блока порівняння, релейного елемента, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з об'єктом управління, який відрізняється тим, що додатково введені диференціатор, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком вибірки-зберігання, вхід якого з'єднаний з виходом диференціатора, а вихід - з коректором, один вхід якого з'єднаний з виходом блока вибірки-зберігання, другий - з джерелом впливу, що задається, а вихід з'єднаний з суматором. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 21/00, G05B 1/00
Мітки: перехідному, управління, ділянки, значенням, змінним, початку, пристрій, режимі, гальмування
Код посилання
<a href="https://ua.patents.su/4-112688-pristrijj-upravlinnya-iz-zminnim-znachennyam-pochatku-dilyanki-galmuvannya-v-perekhidnomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Пристрій управління із змінним значенням початку ділянки гальмування в перехідному режимі</a>
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі
Номер патенту: 112686
Опубліковано: 26.12.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 11/00
Мітки: значенням, перехідному, пристрій, керуючого, впливу, управління, режимі, оптимальним
Формула / Реферат:
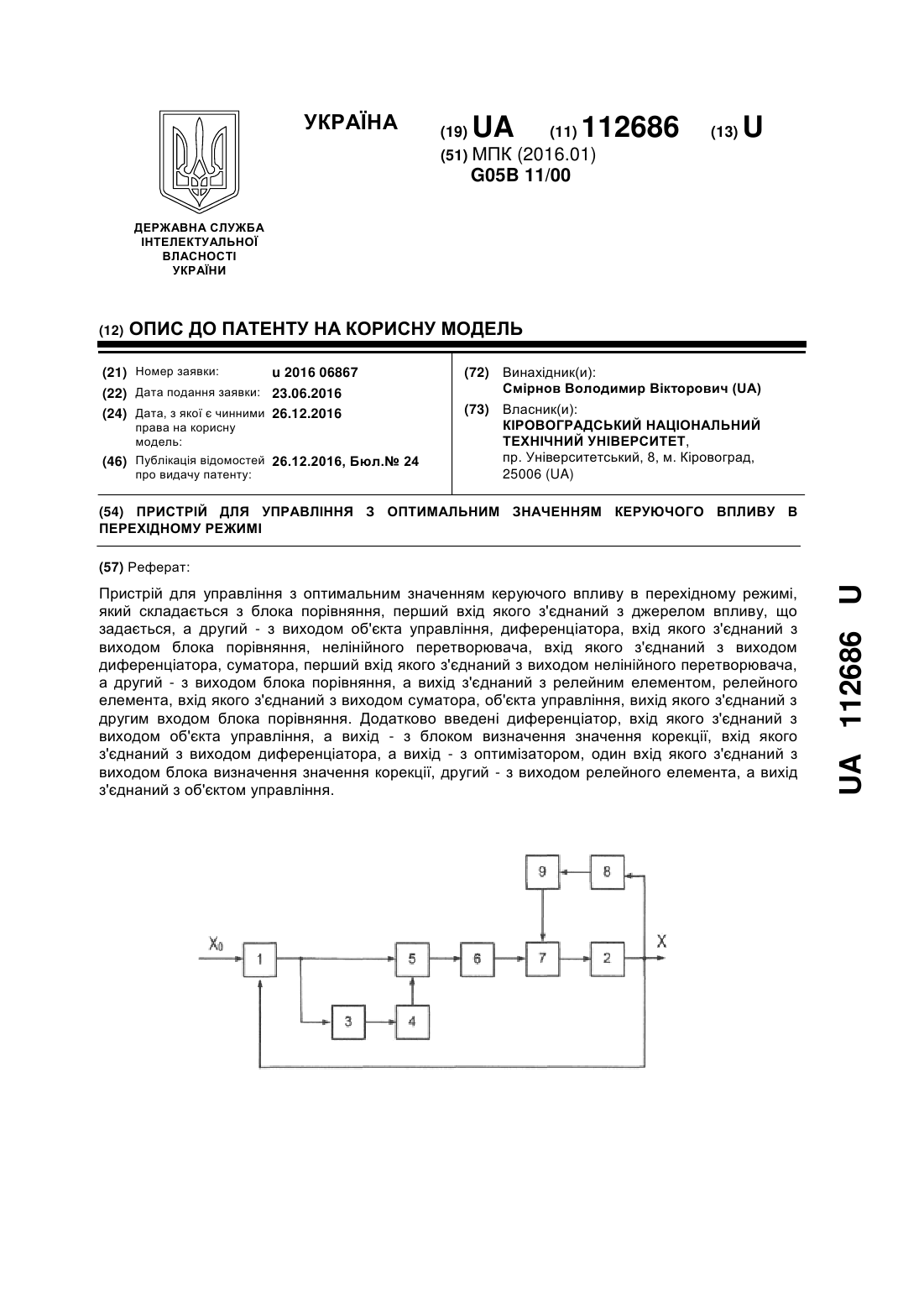
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а...
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення
Номер патенту: 105422
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: малих, оптимальний, похибках, відхілення, управління, пристрій, швидкодією
Формула / Реферат:
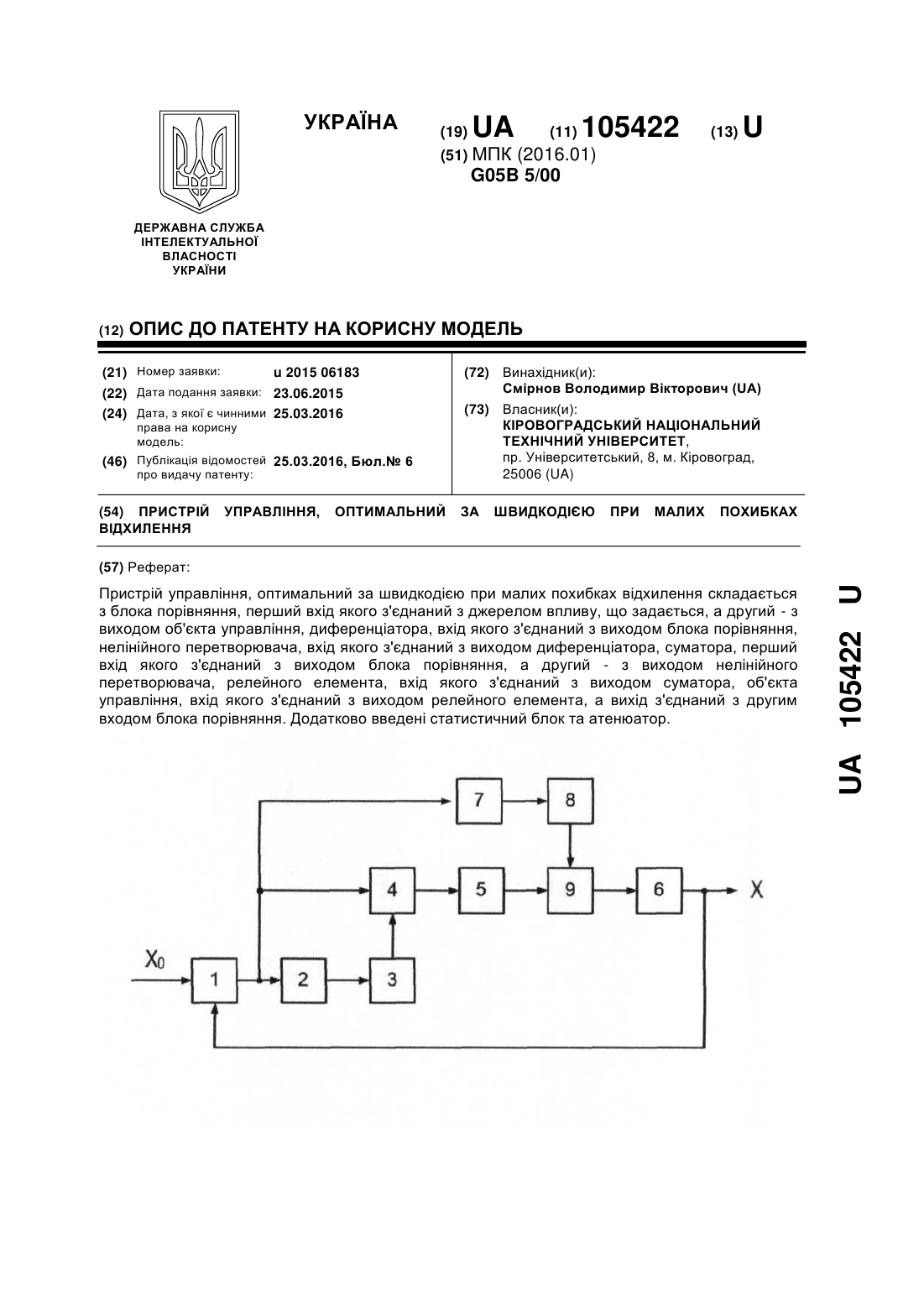
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом...
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють
Номер патенту: 105423
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: стійкий, швидкодією, впливів, управління, пристрій, збурюють, короткочасних, оптимальний
Формула / Реферат:
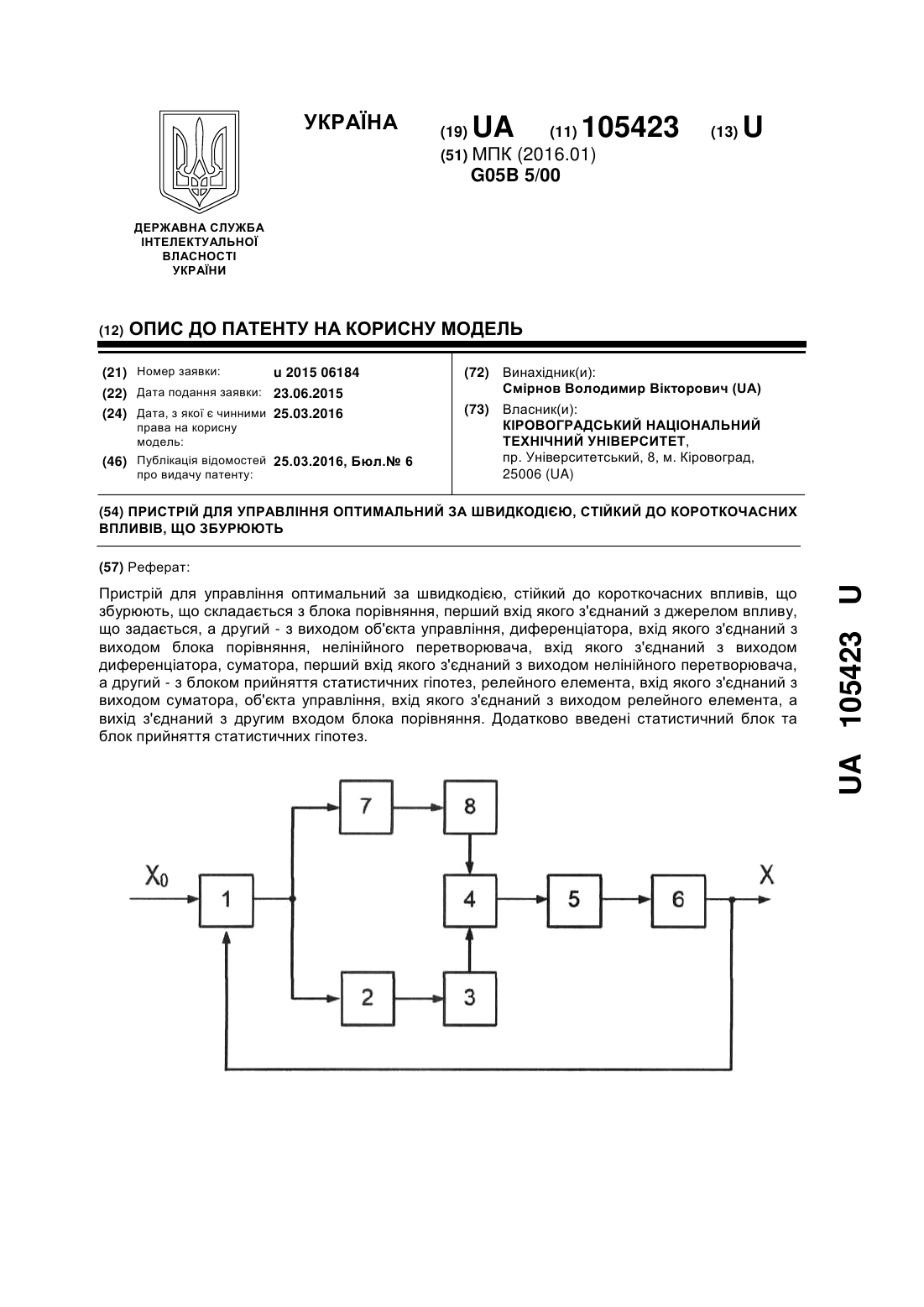
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного...
Пристрій включення сигналу гальмування автомобіля у випадку відмови датчика включення сигналу гальмування
Номер патенту: 48312
Опубліковано: 10.03.2010
Автор: АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ
МПК: B60Q 9/00
Мітки: автомобіля, випадку, відмові, пристрій, гальмування, сигналу, датчика, включення
Формула / Реферат:
Пристрій включення сигналу гальмування автомобіля у випадку відмови датчика включення сигналу гальмування, що містить запобіжник ланцюга управління, запобіжник силового ланцюга, реле включення сигналу гальмування, електричні дроти, датчик включення сигналу гальмування, лампи сигналу гальмування задніх ліхтарів, який відрізняється тим, що додатково містить рульову колонку, педаль гальмування, додатковий електричний дріт, пружний елемент, при...
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Гусєва Альона Олегівна, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: обертання, система, турбіни, управління, швидкістю, адаптивна
Формула / Реферат:
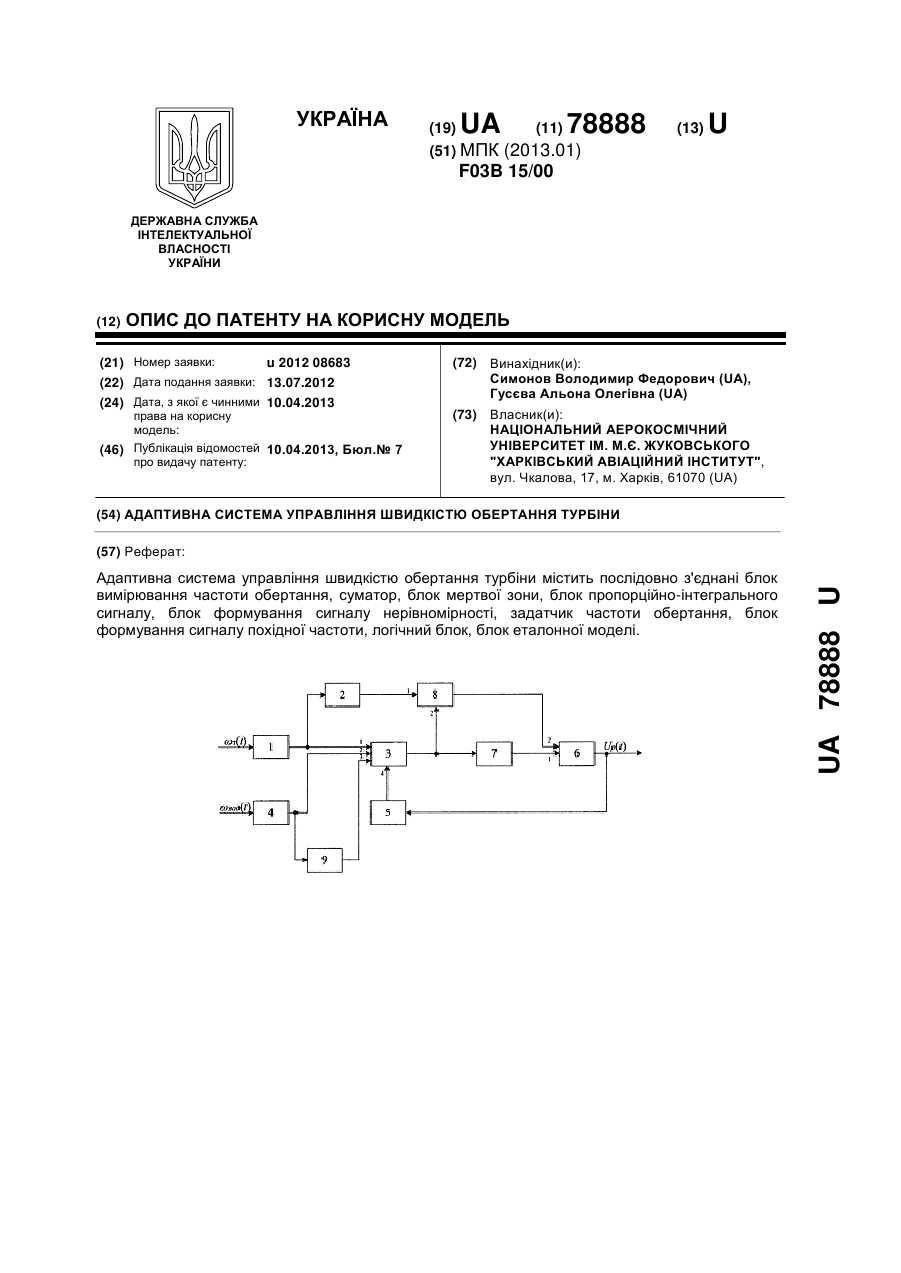
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Попередній патент: Шестеренна гідромашина
Наступний патент: Фасадна ручка
Випадковий патент: Спосіб одержання тканини з вуглецевих волокон шляхом безперервної карбонізації тканини з целюлозних волокон