Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі

Формула / Реферат
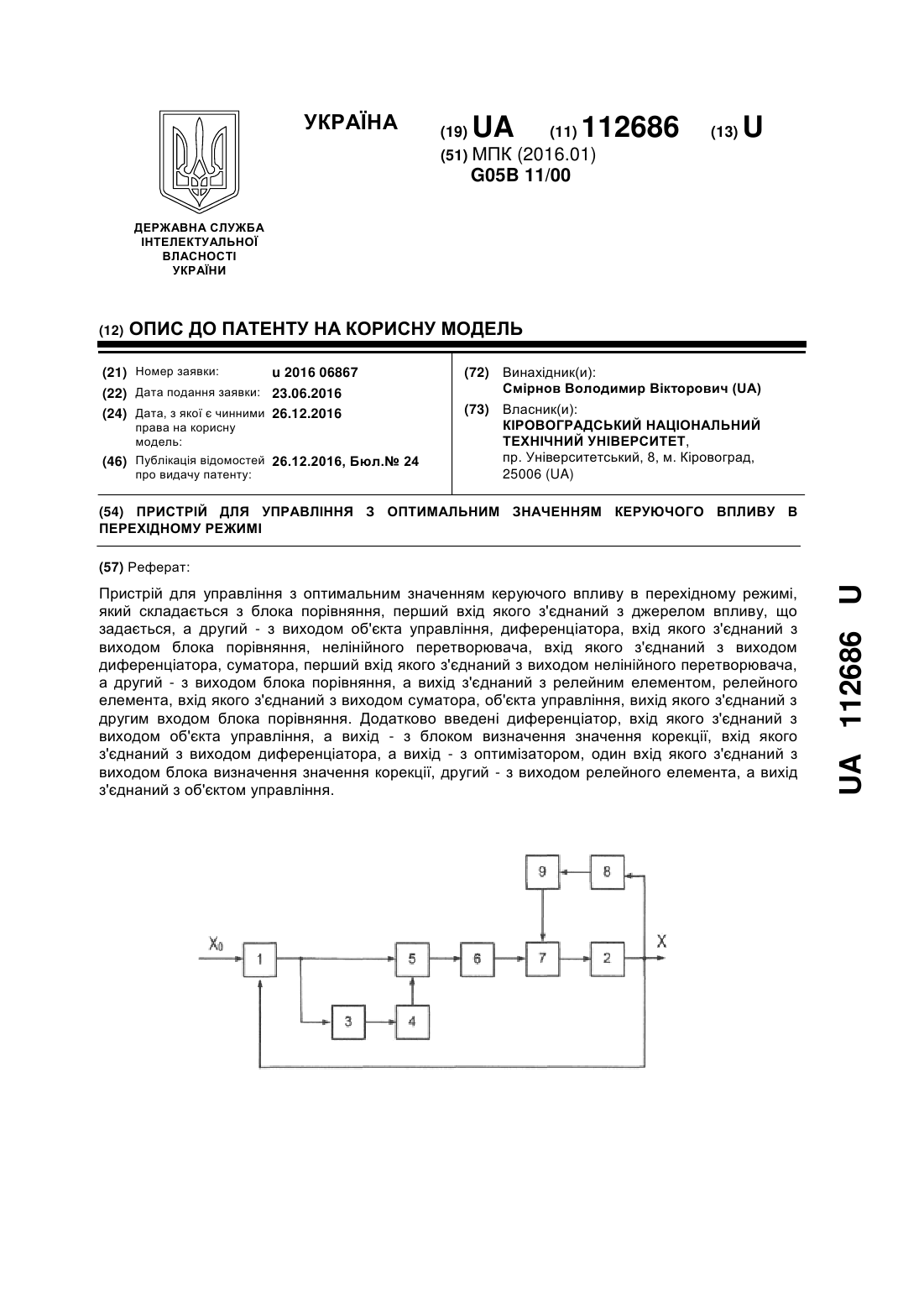
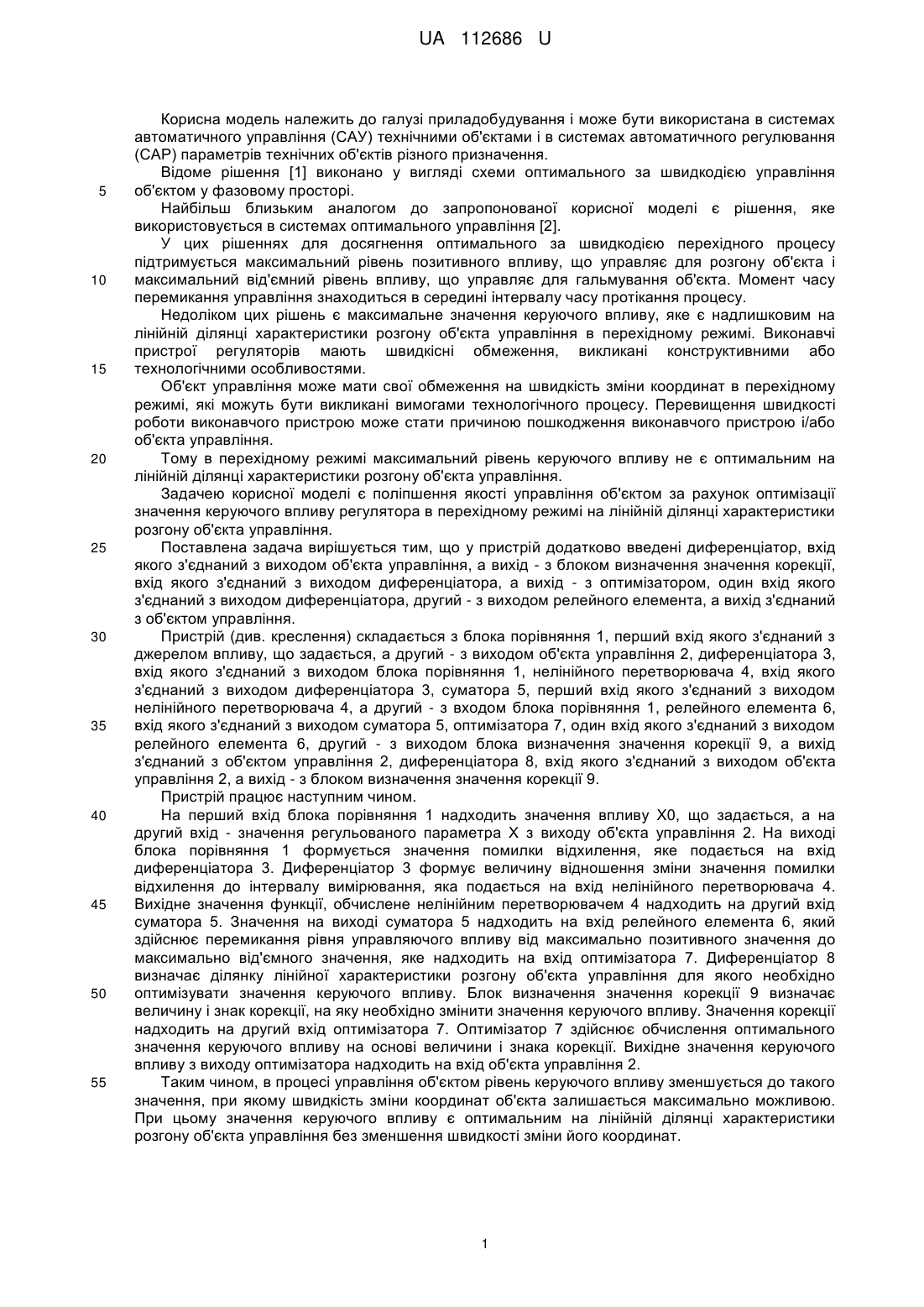
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з виходом блока порівняння, а вихід з'єднаний з релейним елементом, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вихід якого з'єднаний з другим входом блока порівняння, який відрізняється тим, що додатково введені диференціатор, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком визначення значення корекції, вхід якого з'єднаний з виходом диференціатора, а вихід - з оптимізатором, один вхід якого з'єднаний з виходом блока визначення значення корекції, другий - з виходом релейного елемента, а вихід з'єднаний з об'єктом управління.
Текст
Реферат: UA 112686 U UA 112686 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі приладобудування і може бути використана в системах автоматичного управління (САУ) технічними об'єктами і в системах автоматичного регулювання (CAP) параметрів технічних об'єктів різного призначення. Відоме рішення [1] виконано у вигляді схеми оптимального за швидкодією управління об'єктом у фазовому просторі. Найбільш близьким аналогом до запропонованої корисної моделі є рішення, яке використовується в системах оптимального управління [2]. У цих рішеннях для досягнення оптимального за швидкодією перехідного процесу підтримується максимальний рівень позитивного впливу, що управляє для розгону об'єкта і максимальний від'ємний рівень впливу, що управляє для гальмування об'єкта. Момент часу перемикання управління знаходиться в середині інтервалу часу протікання процесу. Недоліком цих рішень є максимальне значення керуючого впливу, яке є надлишковим на лінійній ділянці характеристики розгону об'єкта управління в перехідному режимі. Виконавчі пристрої регуляторів мають швидкісні обмеження, викликані конструктивними або технологічними особливостями. Об'єкт управління може мати свої обмеження на швидкість зміни координат в перехідному режимі, які можуть бути викликані вимогами технологічного процесу. Перевищення швидкості роботи виконавчого пристрою може стати причиною пошкодження виконавчого пристрою і/або об'єкта управління. Тому в перехідному режимі максимальний рівень керуючого впливу не є оптимальним на лінійній ділянці характеристики розгону об'єкта управління. Задачею корисної моделі є поліпшення якості управління об'єктом за рахунок оптимізації значення керуючого впливу регулятора в перехідному режимі на лінійній ділянці характеристики розгону об'єкта управління. Поставлена задача вирішується тим, що у пристрій додатково введені диференціатор, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком визначення значення корекції, вхід якого з'єднаний з виходом диференціатора, а вихід - з оптимізатором, один вхід якого з'єднаний з виходом диференціатора, другий - з виходом релейного елемента, а вихід з'єднаний з об'єктом управління. Пристрій (див. креслення) складається з блока порівняння 1, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління 2, диференціатора 3, вхід якого з'єднаний з виходом блока порівняння 1, нелінійного перетворювача 4, вхід якого з'єднаний з виходом диференціатора 3, суматора 5, перший вхід якого з'єднаний з виходом нелінійного перетворювача 4, а другий - з входом блока порівняння 1, релейного елемента 6, вхід якого з'єднаний з виходом суматора 5, оптимізатора 7, один вхід якого з'єднаний з виходом релейного елемента 6, другий - з виходом блока визначення значення корекції 9, а вихід з'єднаний з об'єктом управління 2, диференціатора 8, вхід якого з'єднаний з виходом об'єкта управління 2, а вихід - з блоком визначення значення корекції 9. Пристрій працює наступним чином. На перший вхід блока порівняння 1 надходить значення впливу Х0, що задається, а на другий вхід - значення регульованого параметра X з виходу об'єкта управління 2. На виході блока порівняння 1 формується значення помилки відхилення, яке подається на вхід диференціатора 3. Диференціатор 3 формує величину відношення зміни значення помилки відхилення до інтервалу вимірювання, яка подається на вхід нелінійного перетворювача 4. Вихідне значення функції, обчислене нелінійним перетворювачем 4 надходить на другий вхід суматора 5. Значення на виході суматора 5 надходить на вхід релейного елемента 6, який здійснює перемикання рівня управляючого впливу від максимально позитивного значення до максимально від'ємного значення, яке надходить на вхід оптимізатора 7. Диференціатор 8 визначає ділянку лінійної характеристики розгону об'єкта управління для якого необхідно оптимізувати значення керуючого впливу. Блок визначення значення корекції 9 визначає величину і знак корекції, на яку необхідно змінити значення керуючого впливу. Значення корекції надходить на другий вхід оптимізатора 7. Оптимізатор 7 здійснює обчислення оптимального значення керуючого впливу на основі величини і знака корекції. Вихідне значення керуючого впливу з виходу оптимізатора надходить на вхід об'єкта управління 2. Таким чином, в процесі управління об'єктом рівень керуючого впливу зменшується до такого значення, при якому швидкість зміни координат об'єкта залишається максимально можливою. При цьому значення керуючого впливу є оптимальним на лінійній ділянці характеристики розгону об'єкта управління без зменшення швидкості зміни його координат. 1 UA 112686 U Нові ознаки дозволяють використовувати пристрій для управління з оптимальним значенням керуючого впливу без погіршення динамічних властивостей системи, тим самим зберігаючи оптимальність за швидкодією. 5 10 Джерела інформації: 1. Александровский Η.Μ. Элементы теории оптимальных систем автоматического управления// Б-ка по автоматике. Вып. 371/Η.Μ. Александровский. - М.: "Энергия", 1969. - 128 с. 2. Александровский Η.Μ. Элементы теории оптимальных систем автоматического управления// Б-ка по автоматике. Вып. 371/Η.Μ. Александровский. - М.: "Энергия", 1969. - стр. 20. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з виходом блока порівняння, а вихід з'єднаний з релейним елементом, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вихід якого з'єднаний з другим входом блока порівняння, який відрізняється тим, що додатково введені диференціатор, вхід якого з'єднаний з виходом об'єкта управління, а вихід - з блоком визначення значення корекції, вхід якого з'єднаний з виходом диференціатора, а вихід - з оптимізатором, один вхід якого з'єднаний з виходом блока визначення значення корекції, другий - з виходом релейного елемента, а вихід з'єднаний з об'єктом управління. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 11/00
Мітки: впливу, пристрій, управління, керуючого, значенням, перехідному, оптимальним, режимі
Код посилання
<a href="https://ua.patents.su/4-112686-pristrijj-dlya-upravlinnya-z-optimalnim-znachennyam-keruyuchogo-vplivu-v-perekhidnomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі</a>
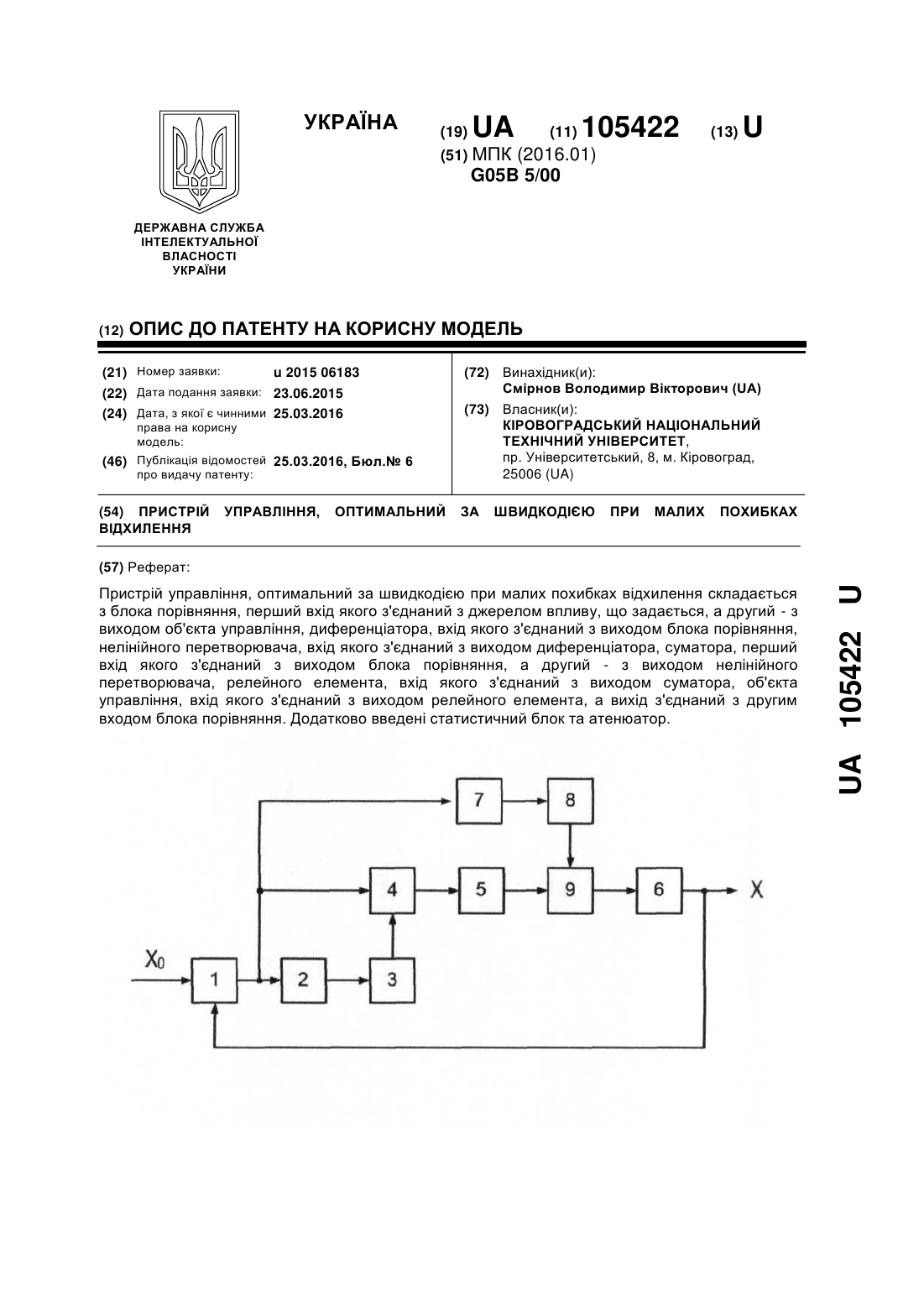
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення
Номер патенту: 105422
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: швидкодією, похибках, оптимальний, пристрій, відхілення, малих, управління
Формула / Реферат:
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом...
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють
Номер патенту: 105423
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: швидкодією, впливів, управління, оптимальний, стійкий, пристрій, збурюють, короткочасних
Формула / Реферат:
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного...
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Симонов Володимир Федорович, Гусєва Альона Олегівна
МПК: F03B 15/00
Мітки: обертання, адаптивна, швидкістю, система, турбіни, управління
Формула / Реферат:
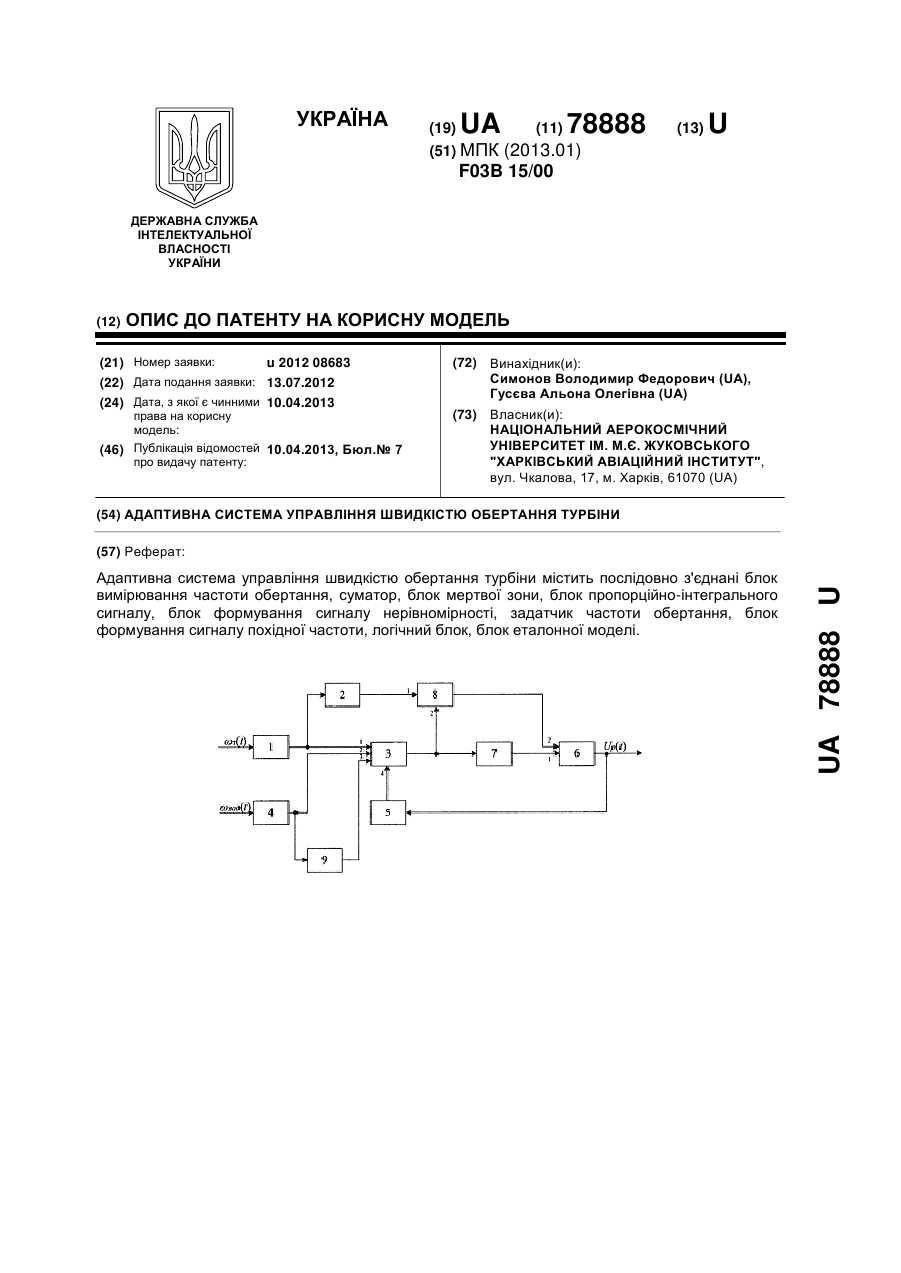
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Рульове керування по положенню з постійною чутливістю до керуючого впливу
Номер патенту: 102573
Опубліковано: 10.11.2015
Автори: Бондар Андрій Миколайович, Кашкарьов Антон Олександрович, Петров Віктор Олексійович
Мітки: рульове, керуючого, чутливістю, постійною, впливу, положенню, керування
Формула / Реферат:
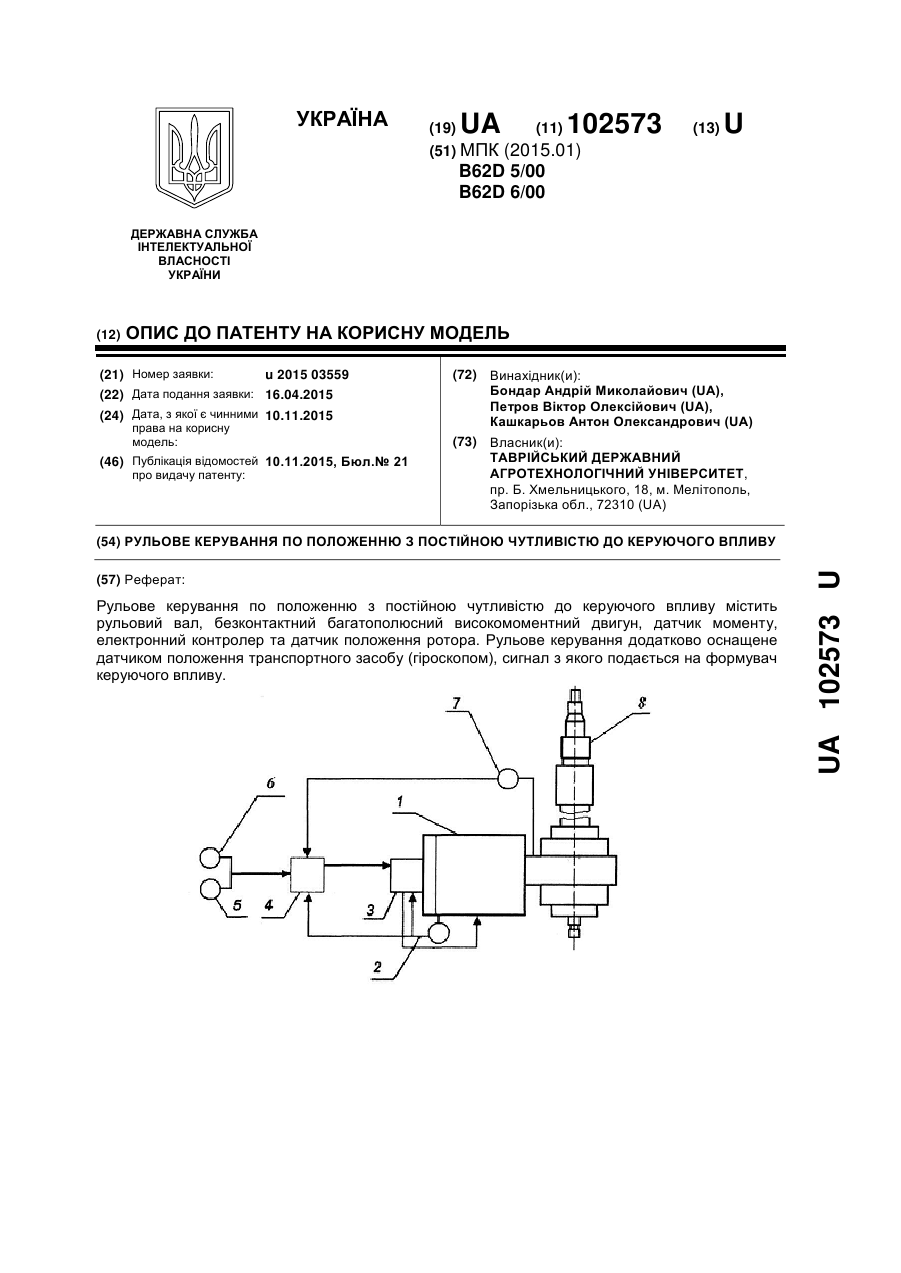
Рульове керування по положенню з постійною чутливістюдо керуючого впливу, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, датчик моменту, електронний контролер та датчик положення ротора, яке відрізняється тим, що воно додатково оснащене датчиком положення транспортного засобу (гіроскопом), сигнал з якого подається на формувач керуючого впливу.
Пристрій для керуючого впливу прикладених сил притискних роликів
Номер патенту: 78573
Опубліковано: 10.04.2007
Автори: Золер Йорн, Келлер Карл, Кляйн Ахім, Шеффе Курт, Бройєр Міхель
МПК: B21B 29/00
Мітки: впливу, роликів, притискних, сіль, керуючого, пристрій, прикладених
Формула / Реферат:
1. Пристрій для керуючого впливу прикладених сил притискних роликів, зокрема прикладених до робочих валків опорних валків (SW), що спираються в несучому корпусі підшипника або в подушці підшипника валків прокатної кліті на підшипники кочення або ковзання цапфи (WZ), які мають уступ (ZA) цапфи, який спирається на опорний підшипник, корпус (LG) якого встановлений із зовнішньої сторони в несучий корпус підшипника притискних роликів або в подушку...
Попередній патент: Вал карданної передачі
Наступний патент: Шестеренна гідромашина
Випадковий патент: Спосіб виготовлення пива