Пристрій управління, оптимальний за швидкодією при малих похибках відхилення

Формула / Реферат
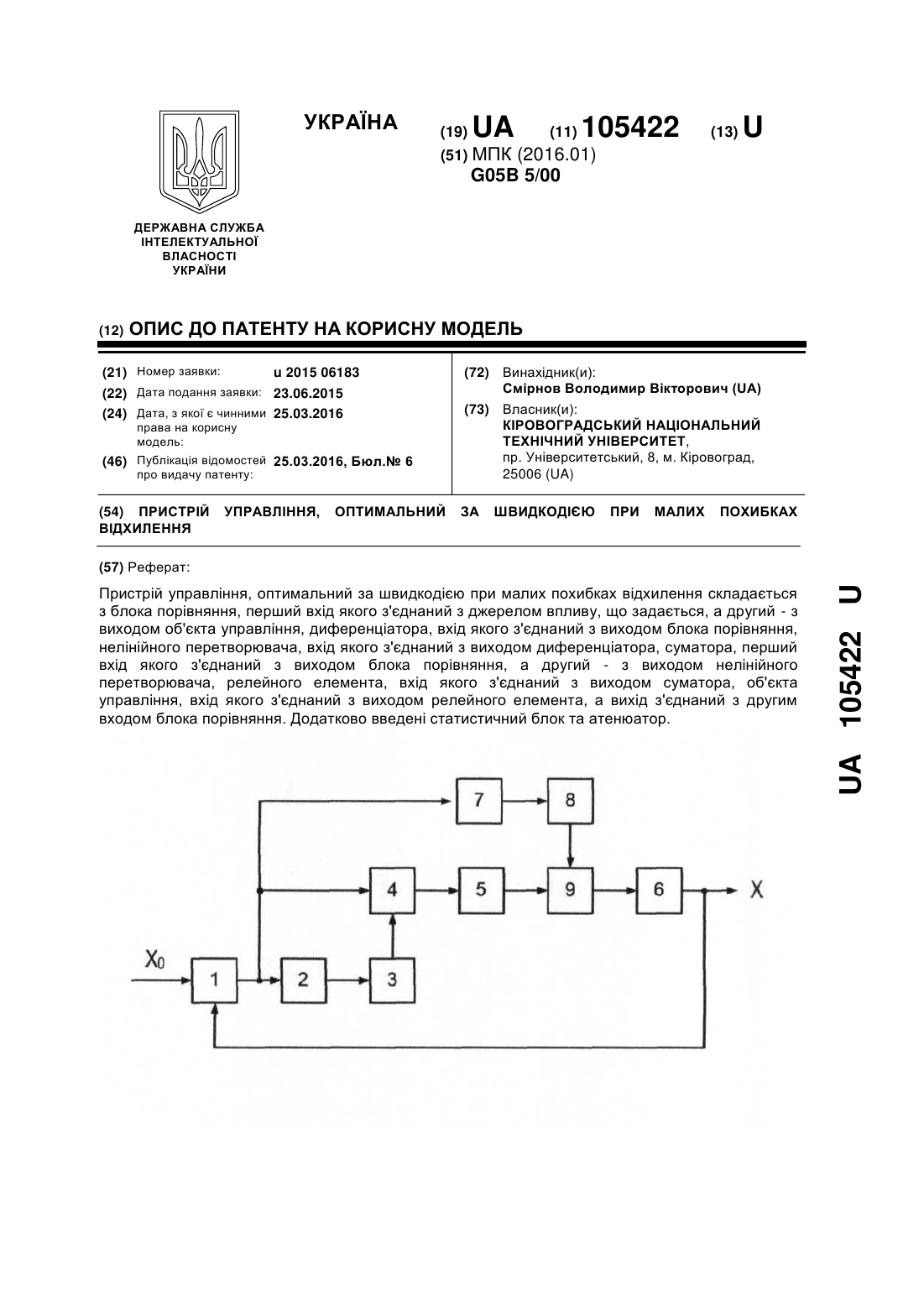
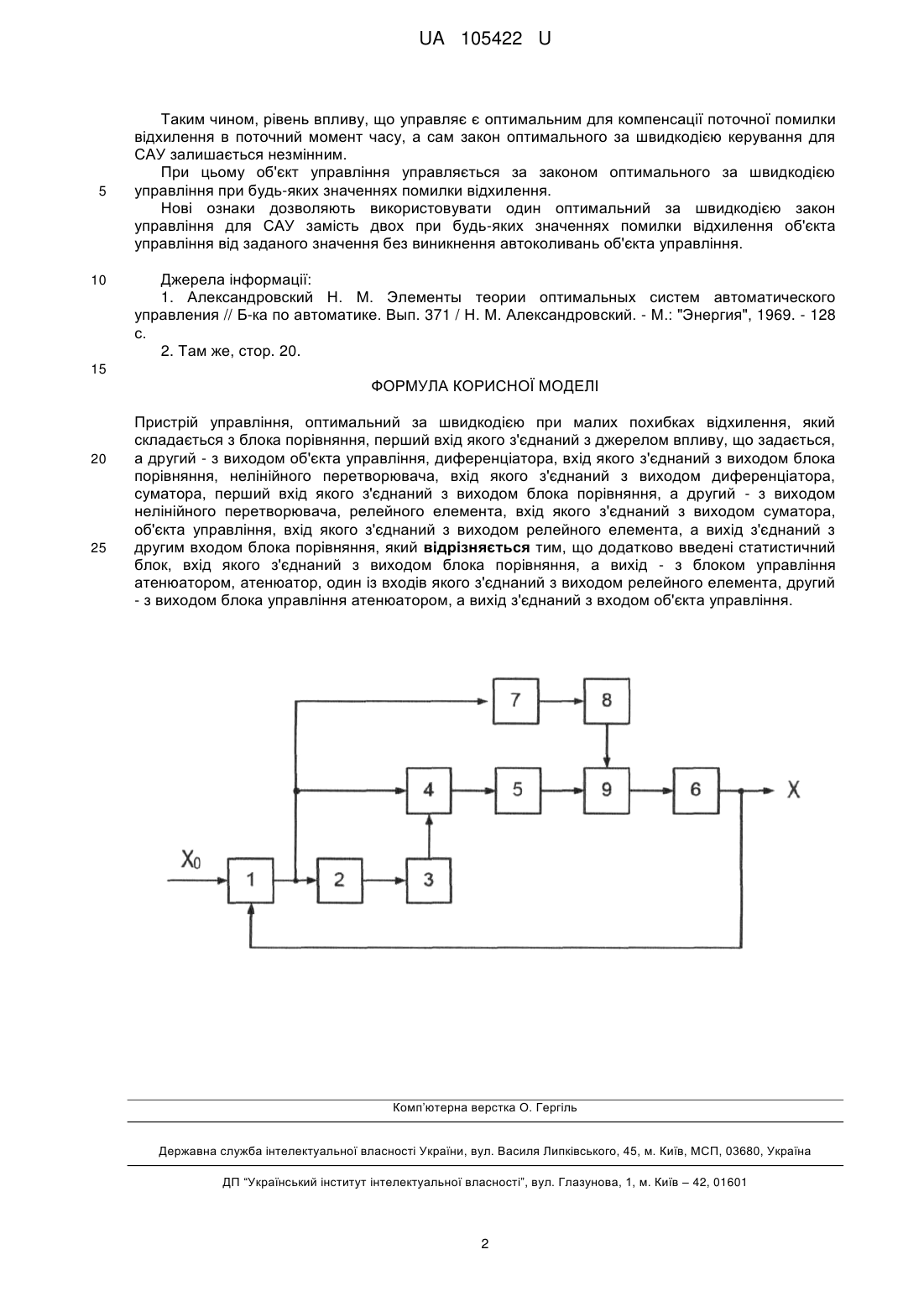
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом нелінійного перетворювача, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння, який відрізняється тим, що додатково введені статистичний блок, вхід якого з'єднаний з виходом блока порівняння, а вихід - з блоком управління атенюатором, атенюатор, один із входів якого з'єднаний з виходом релейного елемента, другий - з виходом блока управління атенюатором, а вихід з'єднаний з входом об'єкта управління.
Текст
Реферат: UA 105422 U UA 105422 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі приладобудування і може бути використаний в системах автоматичного управління (САУ) технічними об'єктами і в системах автоматичного регулювання (CAP) параметрів технічних об'єктів різного призначення. Відоме рішення [1] виконано у вигляді схеми оптимального за швидкодією управління об'єктом у фазовому просторі. Найбільш близьким до технічного рішення, що заявляється, є рішення, яке використовується в системах оптимального управління [2]. Для досягнення оптимального за швидкодією перехідного процесу підтримується максимальний рівень позитивного впливу, що управляє для розгону об'єкта і максимальний від'ємний рівень впливу, що управляє для гальмування об'єкта. Момент часу перемикання управління знаходиться в середині інтервалу часу протікання процесу. САУ стійко працює при великих відхиленнях регульованого параметра об'єкта від заданого значення. Недоліком такої САУ є виникнення режиму автоколивань при малих відхиленнях регульованого параметра об'єкта від заданого значення. Для заглушення автоколивань при малих відхиленнях застосовуються інші закони управління, наприклад управління по відхиленню. У цьому випадку, САУ перестає використовувати закон оптимального управління і перестає бути оптимальною за швидкодією. Іншим недоліком такої САУ є зміна форми перехідного процесу об'єкта управління при зміні закону управління. Задача, яка вирішується, полягає у поліпшенні якості управління об'єктом, використання одного оптимального за швидкодією закону управління для САУ замість двох, виключенні виникнення режиму автоколивань і в забезпеченні оптимального за швидкодією режиму управління об'єктом при малих відхиленнях. Поставлена задача вирішується за рахунок того, що у відомий пристрій додатково введені статистичний блок, вхід якого з'єднаний з виходом блока порівняння, а вихід - з блоком управління атенюатором, атенюатор, один із входів якого з'єднаний з виходом релейного елемента, другий - з виходом блока управління атенюатором, а вихід з'єднаний з входом об'єкта управління. Пристрій складається з блока порівняння 1, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління 6, диференціатора 2, вхід якого з'єднаний з виходом блока порівняння 1, нелінійного перетворювача 3, вхід якого з'єднаний з виходом диференціатора 2, суматора 4, перший вхід якого з'єднаний з виходом блока порівняння 1, а другий - з виходом нелінійного перетворювача 3, релейного елемента 5, вхід якого з'єднаний з виходом суматора 4, об'єкта управління 6, вхід якого з'єднаний з виходом релейного елемента 5, а вихід з'єднаний з другим входом блока порівняння 1, статистичного блока 7, вхід якого з'єднаний з виходом блока порівняння 1, а вихід - з блоком управління атенюатором 8, атенюатора 9, один із входів якого з'єднаний з виходом релейного елемента 5, другий - з виходом блока управління атенюатором 8, а вихід з'єднаний з входом об'єкта управління 6. Пристрій працює наступним чином. На перший вхід блока порівняння 1 надходить значення впливу Х0, що задається, а на другий вхід - значення регульованого параметра X з виходу об'єкта управління 6. На виході блока порівняння 1 формується значення помилки відхилення, яке подається на вхід диференціатора 2, на вхід суматора 4 і на вхід статистичного блока 7. Диференціатор 2 формує величину відношення зміни значення помилки відхилення до інтервалу вимірювання, яка подається на вхід нелінійного перетворювача 3. Вихідне значення функції, обчислене нелінійним перетворювачем 3 надходить на другий вхід суматора 4. Значення на виході суматора 4 надходить на вхід релейного елемента 5, який здійснює перемикання рівня управляючого впливу від максимально позитивного значення до максимально від'ємного значення. Статистичний блок 7, на вхід якого надходить значення помилки відхилення з виходу блока порівняння 1 формує сигнал, що управляє, для блока управління атенюатором 8 на підставі поточного значення помилки відхилення і статистичних даних про величину помилки відхилення протягом заданого інтервалу спостереження. З виходу статистичного блоку 7 сигнал, що управляє надходить на вхід блоку управління атенюатором 8, з виходу якого сигнал надходить на вхід атенюатора 9, який формує необхідне значення впливу, що управляє, яке надходить на вхід об'єкта управління 6. В процесі управління об'єктом рівень впливу, що управляє при малих відхиленнях змінюється пропорційно поточному значенню помилки відхилення та статистичним даним про величину помилки відхилення протягом заданого інтервалу спостереження. 1 UA 105422 U 5 10 Таким чином, рівень впливу, що управляє є оптимальним для компенсації поточної помилки відхилення в поточний момент часу, а сам закон оптимального за швидкодією керування для САУ залишається незмінним. При цьому об'єкт управління управляється за законом оптимального за швидкодією управління при будь-яких значеннях помилки відхилення. Нові ознаки дозволяють використовувати один оптимальний за швидкодією закон управління для САУ замість двох при будь-яких значеннях помилки відхилення об'єкта управління від заданого значення без виникнення автоколивань об'єкта управління. Джерела інформації: 1. Александровский Η. Μ. Элементы теории оптимальных систем автоматического управления // Б-ка по автоматике. Вып. 371 / Η. Μ. Александровский. - М.: "Энергия", 1969. - 128 с. 2. Там же, стор. 20. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом нелінійного перетворювача, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння, який відрізняється тим, що додатково введені статистичний блок, вхід якого з'єднаний з виходом блока порівняння, а вихід - з блоком управління атенюатором, атенюатор, один із входів якого з'єднаний з виходом релейного елемента, другий - з виходом блока управління атенюатором, а вихід з'єднаний з входом об'єкта управління. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюController optimal by response speed at insignificant offset errors
Автори англійськоюSmirnov Volodymyr Viktorovych
Назва патенту російськоюУстройство управления, оптимальное по быстродействию при малых погрешностях отклонения
Автори російськоюСмирнов Владимир Викторович
МПК / Мітки
МПК: G05B 5/00
Мітки: малих, управління, швидкодією, пристрій, похибках, оптимальний, відхілення
Код посилання
<a href="https://ua.patents.su/4-105422-pristrijj-upravlinnya-optimalnijj-za-shvidkodiehyu-pri-malikh-pokhibkakh-vidkhilennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій управління, оптимальний за швидкодією при малих похибках відхилення</a>
Відмовостійкий процесорний пристрій з підвищеною швидкодією
Номер патенту: 76984
Опубліковано: 25.01.2013
Автори: Кобозєва Алла Анатоліївна, Борисенко Ірина Іванівна, Мартинюк Сергій Михайлович, Гунченко Юрій Олександрович, Лєнков Сергій Васильович
МПК: G06F 11/27
Мітки: відмовостійкий, підвищеною, швидкодією, пристрій, процесорний
Формула / Реферат:
Відмовостійкий процесорний пристрій з підвищеною швидкодією, який містить лічильник команд, регістр копії лічильника команд, блок регістрів загального призначення, блок копії регістрів загального призначення, блок пам'яті програм, блок управління та виконання команд, блок визначення сигнатури, буфер запису, блок пам'яті даних, перший регістр сигнатури, при цьому перший вихід лічильника команд, через регістр копії лічильника команд, з'єднано...
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Симонов Володимир Федорович, Гусєва Альона Олегівна
МПК: F03B 15/00
Мітки: швидкістю, система, турбіни, управління, адаптивна, обертання
Формула / Реферат:
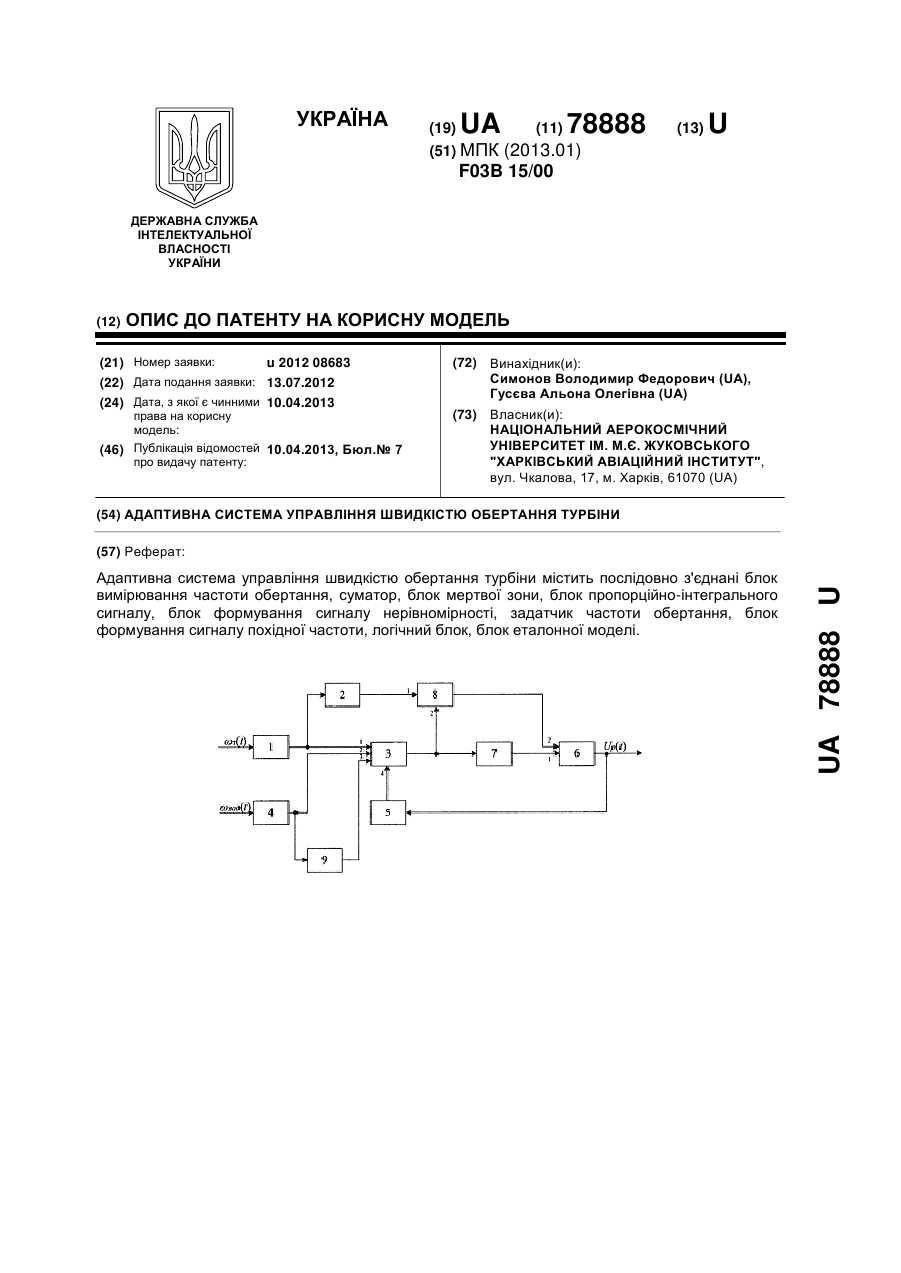
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Пристрій для автоматичного управління висотою польоту

Номер патенту: 101040
Опубліковано: 25.08.2015
Автор: Антонов Володимир Костянтинович
МПК: G08G 5/00
Мітки: польоту, висотою, автоматичного, пристрій, управління
Формула / Реферат:
Пристрій для автоматичного управління висотою польоту, що містить задатчик заданої висоти, датчик поточної висоти, блок їх порівняння, і блок формування керуючого впливу, який відрізняється тим, що в контур формування керуючого впливу додатково введено блок обмеження значення відхилення поточної висоти від заданої.
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Карпова Тетяна Володимирівна
МПК: B64C 13/18, G05D 1/08
Мітки: система, апарата, кутом, управління, тангажа, літального
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Пристрій для вимірювання малих переміщень
Номер патенту: 45156
Опубліковано: 26.10.2009
Автори: Білинський Йосип Йосипович, Білинський Володимир Йосипович, Кухарчук Василь Васильович
МПК: G01B 11/16
Мітки: переміщень, вимірювання, малих, пристрій
Формула / Реферат:
Пристрій для вимірювання малих переміщень містить освітлювач, об'єктив, оптичний вихід якого пов'язаний з фотолінійкою, обчислювальний пристрій, вхід якого пов'язаний з виходом фотолінійки, який відрізняється тим, що в нього введено рейку зі щілиною, на якій жорстко закріплений освітлювач і об'єктив, а оптичний вхід щілини пов'язаний з освітлювачем, вихід - з об'єктивом, блок керування, вихід якого електрично пов'язаний з входом...
Попередній патент: Бойова колісна машина – машина вогневої підтримки
Наступний патент: Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють
Випадковий патент: Спосіб одержання меланінових пігментів