Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють

Формула / Реферат
Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з блоком прийняття статистичних гіпотез, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння, який відрізняється тим, що додатково введені статистичний блок, вхід якого з'єднаний з виходом блока порівняння, блок прийняття статистичних гіпотез, вхід якого з'єднаний з виходом статистичного блока, а вихід з'єднаний з суматором.
Текст
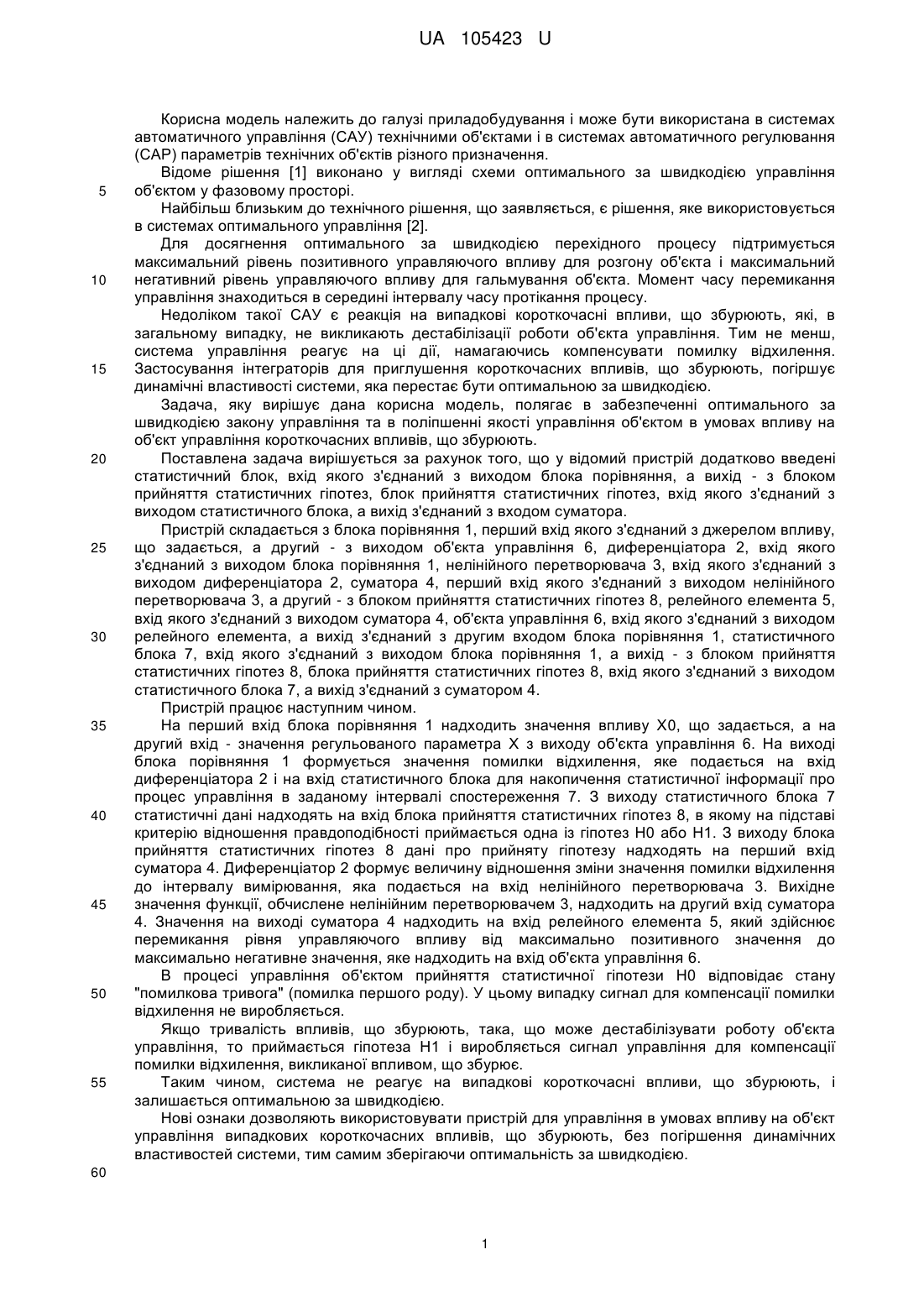
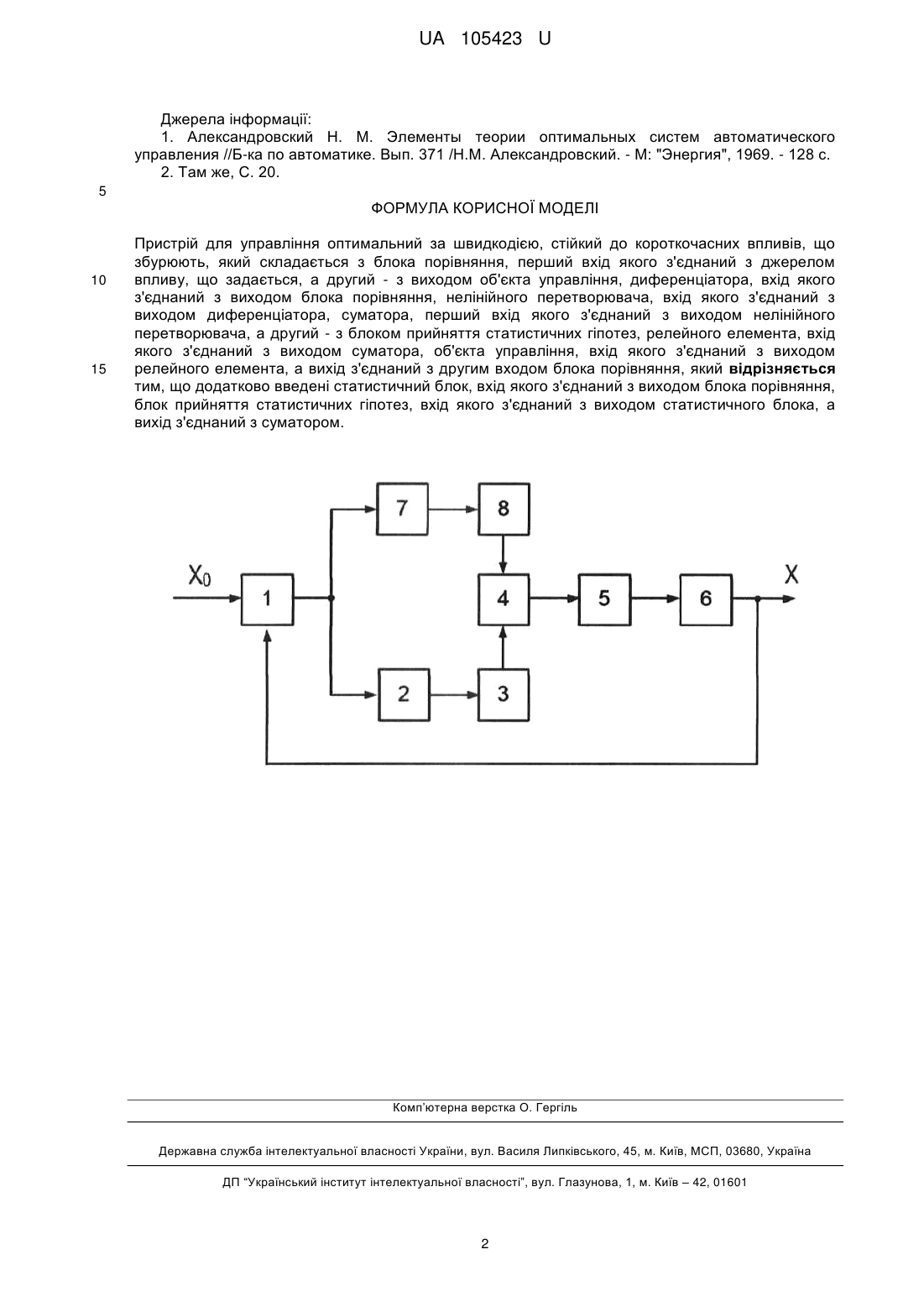
Реферат: UA 105423 U UA 105423 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі приладобудування і може бути використана в системах автоматичного управління (САУ) технічними об'єктами і в системах автоматичного регулювання (CAP) параметрів технічних об'єктів різного призначення. Відоме рішення [1] виконано у вигляді схеми оптимального за швидкодією управління об'єктом у фазовому просторі. Найбільш близьким до технічного рішення, що заявляється, є рішення, яке використовується в системах оптимального управління [2]. Для досягнення оптимального за швидкодією перехідного процесу підтримується максимальний рівень позитивного управляючого впливу для розгону об'єкта і максимальний негативний рівень управляючого впливу для гальмування об'єкта. Момент часу перемикання управління знаходиться в середині інтервалу часу протікання процесу. Недоліком такої САУ є реакція на випадкові короткочасні впливи, що збурюють, які, в загальному випадку, не викликають дестабілізації роботи об'єкта управління. Тим не менш, система управління реагує на ці дії, намагаючись компенсувати помилку відхилення. Застосування інтеграторів для приглушення короткочасних впливів, що збурюють, погіршує динамічні властивості системи, яка перестає бути оптимальною за швидкодією. Задача, яку вирішує дана корисна модель, полягає в забезпеченні оптимального за швидкодією закону управління та в поліпшенні якості управління об'єктом в умовах впливу на об'єкт управління короткочасних впливів, що збурюють. Поставлена задача вирішується за рахунок того, що у відомий пристрій додатково введені статистичний блок, вхід якого з'єднаний з виходом блока порівняння, а вихід - з блоком прийняття статистичних гіпотез, блок прийняття статистичних гіпотез, вхід якого з'єднаний з виходом статистичного блока, а вихід з'єднаний з входом суматора. Пристрій складається з блока порівняння 1, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління 6, диференціатора 2, вхід якого з'єднаний з виходом блока порівняння 1, нелінійного перетворювача 3, вхід якого з'єднаний з виходом диференціатора 2, суматора 4, перший вхід якого з'єднаний з виходом нелінійного перетворювача 3, а другий - з блоком прийняття статистичних гіпотез 8, релейного елемента 5, вхід якого з'єднаний з виходом суматора 4, об'єкта управління 6, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння 1, статистичного блока 7, вхід якого з'єднаний з виходом блока порівняння 1, а вихід - з блоком прийняття статистичних гіпотез 8, блока прийняття статистичних гіпотез 8, вхід якого з'єднаний з виходом статистичного блока 7, а вихід з'єднаний з суматором 4. Пристрій працює наступним чином. На перший вхід блока порівняння 1 надходить значення впливу Х0, що задається, а на другий вхід - значення регульованого параметра X з виходу об'єкта управління 6. На виході блока порівняння 1 формується значення помилки відхилення, яке подається на вхід диференціатора 2 і на вхід статистичного блока для накопичення статистичної інформації про процес управління в заданому інтервалі спостереження 7. З виходу статистичного блока 7 статистичні дані надходять на вхід блока прийняття статистичних гіпотез 8, в якому на підставі критерію відношення правдоподібності приймається одна із гіпотез Н0 або Н1. З виходу блока прийняття статистичних гіпотез 8 дані про прийняту гіпотезу надходять на перший вхід суматора 4. Диференціатор 2 формує величину відношення зміни значення помилки відхилення до інтервалу вимірювання, яка подається на вхід нелінійного перетворювача 3. Вихідне значення функції, обчислене нелінійним перетворювачем 3, надходить на другий вхід суматора 4. Значення на виході суматора 4 надходить на вхід релейного елемента 5, який здійснює перемикання рівня управляючого впливу від максимально позитивного значення до максимально негативне значення, яке надходить на вхід об'єкта управління 6. В процесі управління об'єктом прийняття статистичної гіпотези Н0 відповідає стану "помилкова тривога" (помилка першого роду). У цьому випадку сигнал для компенсації помилки відхилення не виробляється. Якщо тривалість впливів, що збурюють, така, що може дестабілізувати роботу об'єкта управління, то приймається гіпотеза Н1 і виробляється сигнал управління для компенсації помилки відхилення, викликаної впливом, що збурює. Таким чином, система не реагує на випадкові короткочасні впливи, що збурюють, і залишається оптимальною за швидкодією. Нові ознаки дозволяють використовувати пристрій для управління в умовах впливу на об'єкт управління випадкових короткочасних впливів, що збурюють, без погіршення динамічних властивостей системи, тим самим зберігаючи оптимальність за швидкодією. 60 1 UA 105423 U Джерела інформації: 1. Александровский Η. Μ. Элементы теории оптимальных систем автоматического управления //Б-ка по автоматике. Вып. 371 /Η.Μ. Александровский. - М: "Энергия", 1969. - 128 с. 2. Там же, С. 20. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а другий - з блоком прийняття статистичних гіпотез, релейного елемента, вхід якого з'єднаний з виходом суматора, об'єкта управління, вхід якого з'єднаний з виходом релейного елемента, а вихід з'єднаний з другим входом блока порівняння, який відрізняється тим, що додатково введені статистичний блок, вхід якого з'єднаний з виходом блока порівняння, блок прийняття статистичних гіпотез, вхід якого з'єднаний з виходом статистичного блока, а вихід з'єднаний з суматором. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюController optimal by response speed and resistant to short-term interferences
Автори англійськоюSmirnov Volodymyr Viktorovych
Назва патенту російськоюУстройство для управления оптимальное по быстродействию, устойчивое к кратковременным возмущающим воздействиям
Автори російськоюСмирнов Владимир Викторович
МПК / Мітки
МПК: G05B 5/00
Мітки: стійкий, впливів, пристрій, короткочасних, збурюють, оптимальний, управління, швидкодією
Код посилання
<a href="https://ua.patents.su/4-105423-pristrijj-dlya-upravlinnya-optimalnijj-za-shvidkodiehyu-stijjkijj-do-korotkochasnikh-vpliviv-shho-zburyuyut.html" target="_blank" rel="follow" title="База патентів України">Пристрій для управління оптимальний за швидкодією, стійкий до короткочасних впливів, що збурюють</a>
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення
Номер патенту: 105422
Опубліковано: 25.03.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 5/00
Мітки: управління, відхілення, оптимальний, малих, швидкодією, пристрій, похибках
Формула / Реферат:
Пристрій управління, оптимальний за швидкодією при малих похибках відхилення, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом блока порівняння, а другий - з виходом...
Відмовостійкий процесорний пристрій з підвищеною швидкодією
Номер патенту: 76984
Опубліковано: 25.01.2013
Автори: Гунченко Юрій Олександрович, Лєнков Сергій Васильович, Мартинюк Сергій Михайлович, Кобозєва Алла Анатоліївна, Борисенко Ірина Іванівна
МПК: G06F 11/27
Мітки: швидкодією, процесорний, пристрій, відмовостійкий, підвищеною
Формула / Реферат:
Відмовостійкий процесорний пристрій з підвищеною швидкодією, який містить лічильник команд, регістр копії лічильника команд, блок регістрів загального призначення, блок копії регістрів загального призначення, блок пам'яті програм, блок управління та виконання команд, блок визначення сигнатури, буфер запису, блок пам'яті даних, перший регістр сигнатури, при цьому перший вихід лічильника команд, через регістр копії лічильника команд, з'єднано...
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Карпова Тетяна Володимирівна, Симонов Володимир Федорович
МПК: B64C 13/18, G05D 1/08
Мітки: управління, літального, кутом, тангажа, апарата, система
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Симонов Володимир Федорович, Гусєва Альона Олегівна
МПК: F03B 15/00
Мітки: обертання, адаптивна, швидкістю, турбіни, система, управління
Формула / Реферат:
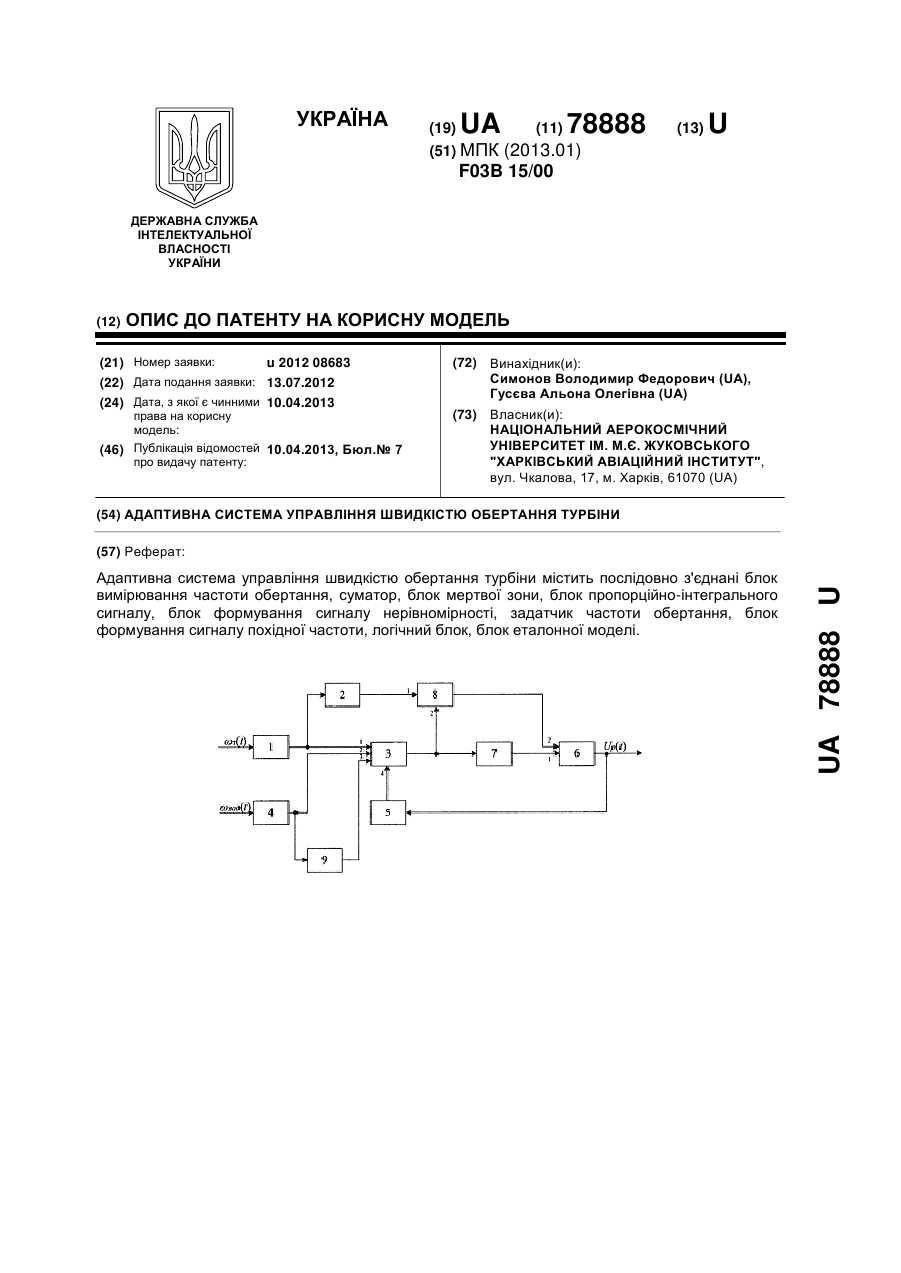
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Конвеєрний пристрій
Номер патенту: 28540
Опубліковано: 10.12.2007
Автори: Кожем'яко Володимир Прокопович, Чечельницький Олег Іванович, Мороз Ірина Віталіївна, Мартинюк Тетяна Борисівна, Онищенко Віктор Константинович
МПК: G06F 7/50
Мітки: пристрій, конвеєрний
Формула / Реферат:
Конвеєрний пристрій, який містить n входів і n комірок, крім того, і-та комірка містить блок порівняння, суматор, мініматор, три регістри, D-тригер, мультиплексор і блок логічних елементів І, причому перший вхід і-ої комірки з'єднаний з першим входом мультиплексора, вихід якого підключений до входу першого регістра, вихід якого з'єднаний з першим входом блока порівняння та першим входом мініматора, вихід якого з'єднаний з третім регістром, а...
Попередній патент: Пристрій управління, оптимальний за швидкодією при малих похибках відхилення
Наступний патент: 5-[(1-арил-4-хлоро-1н-імідазол-5-іл)метил]-1,3-тіазолідин-2,4-діони, які виявляють гіпоглікемічну активність
Випадковий патент: Четвертинні амонієві солі як регулятор реологічних властивостей триацетатцелюлозної композиції